模糊算法在PLC程序的實現
2019-03-08 14:24:59劉銘
科技資訊 2019年34期
劉銘
摘? 要:模糊控制(Fuzzy Control)是基于模糊語言變量、模糊邏輯理論等理論以及實踐經驗逐步發展而形成的,使得現代控制技術、計算機技術能夠有效融合,是一種現代智能控制技術。該控制方法的優點為,對建模精度要求相對較低;基于工作人員的經驗可實現對系統的有效控制。也正是因為這些優勢,在大時滯、非穩定等情況下,模糊控制的抗擾動能力較為突出。因此,該文主要就模糊算法在PLC程序的實現進行了簡要的闡述。
關鍵詞:模糊算法? 模糊控制? PLC程序
中圖分類號:TP273 ? ?文獻標識碼:A 文章編號:1672-3791(2019)12(a)-0014-02
1? 模糊控制系統簡介
模糊控制系統的主要部分如圖1所示,其主要構成包括執行器、傳感器等。對比分析模糊控制系統與PID控制器能夠發現,兩種方法在很多方面存在差異,包括各自的算法原理、輸入維數等都有所差異。
2? 模糊控制器的設計
圖2為模糊控制器的原理框架圖。
模糊控制器的設計流程如下。
(1)明確模糊控制器的構成。
輸入維數的大小在很大程度上會對控制結果產生影響,因此,為了使得控制結果盡可能精確,要求選擇盡量多的輸入維數,而輸入維數過多必然會導致規則庫所需的數據量過多,這就加大了指定難度。筆者參考操作人員的實踐經驗,最終在模糊控制器的設計中確定了雙輸入單輸出的控制結構,采取這種結構更為合理,得到的結果也比較理想。
(2)確定模糊語言值。
該系統中e、ec為輸入值,E與EC即為對前者進行了模糊處理之后獲得的,最終的輸出值為U。模糊語言值的選擇為{負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)},相應的量化等級為{-3,-2,-1,0,1,2,3}。
(3)選擇隸屬函數。
在選擇隸屬度函數時通常會以專家以及工作人員的經驗為依據,在設計本系統時,考慮到項目實際情況與工作人員的經驗,最終確定三角形隸屬度函數為控制函數。
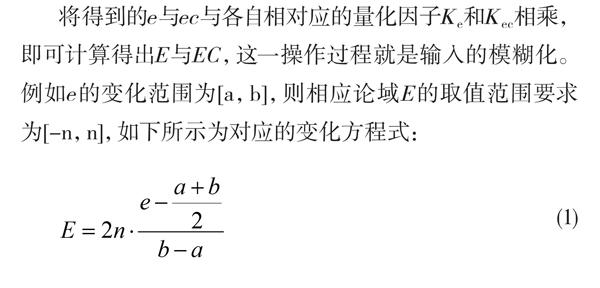
(4)輸入值的模糊化。
將得到的e與ec與各自相對應的量化因子Ke和Kec相乘,即可計算得出E與EC,這一操作過程就是輸入的模糊化。例如e的變化范圍為[a,b],則相應論域E的取值范圍要求為[-n,n],如下所示為對應的變化方程式:
(1)
(2)
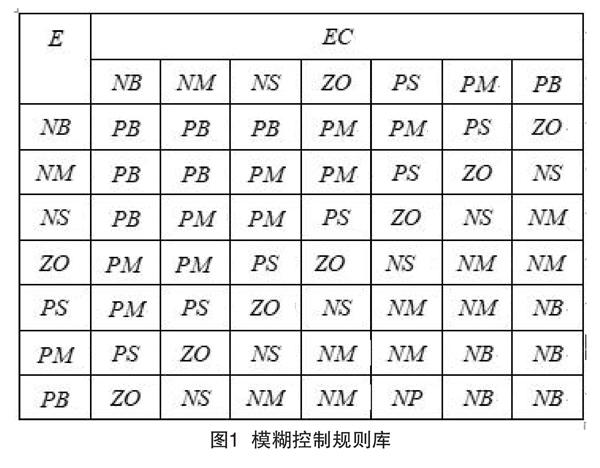
(5)建立模糊規則庫。
模糊規則庫是依據操作人員的工作經驗,以及現場的實際情況,綜合三角形隸屬度函數以及模糊的運算法則而得到的,具體如圖1所示。
(6)模糊推理。
結合表1,運用Mamdani推理方法,由if、and、or、then等模糊語句及其運算關系可得下式所示的模糊關系R。
R=E×EC×U ? ? ? ?(3)
可得模糊推理為:
R1:if e is NB and ec is NB then U is PB
R2:if e is NB and ec is NM then U is PB
R3:if e is NB and ec is NS then U is PM
R4:if e is NB and ec is ZO then U is PM
R5:if e is NB and ec is PS then U is ZO
R6:if e is NB and ec is PM then U is ZB
R7:if e is NB and ec is PB then U is NB
(7)調節量的清晰化。
完成上述程序操作之后可得模糊控制量U,將其與量化因子Ku相乘即可獲得實際控制量u,即實現了調節量的清晰化。
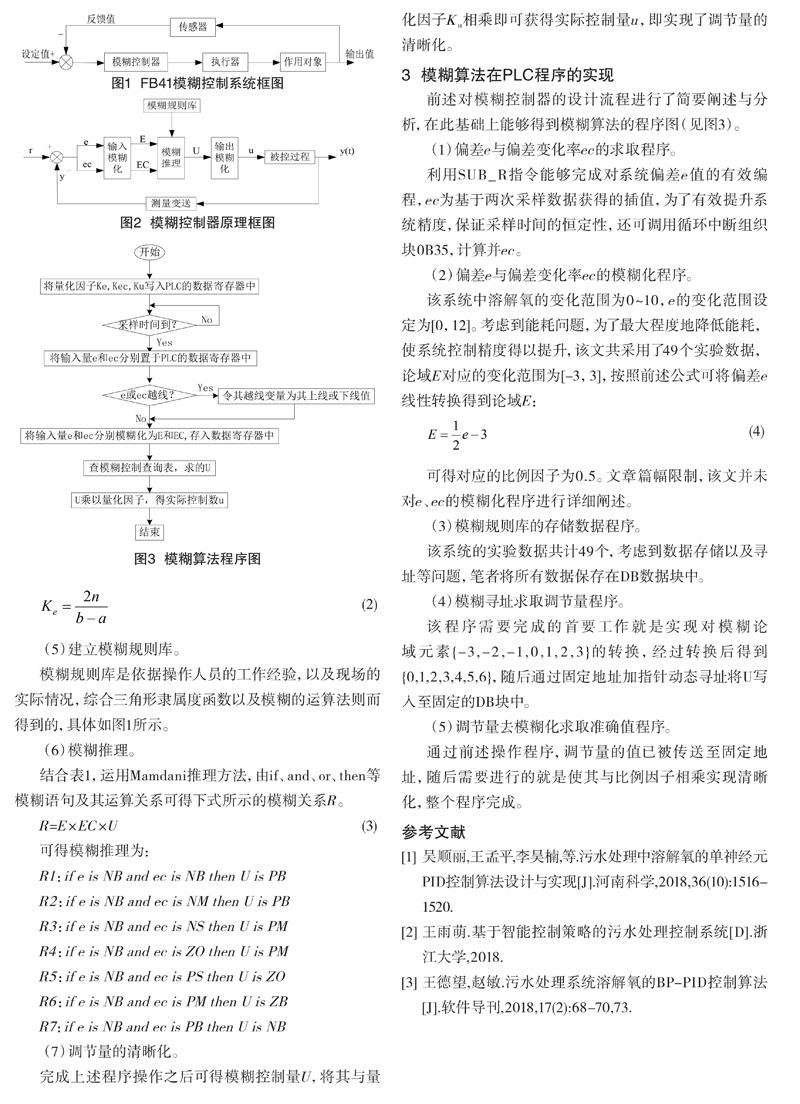
3? 模糊算法在PLC程序的實現
前述對模糊控制器的設計流程進行了簡要闡述與分析,在此基礎上能夠得到模糊算法的程序圖(見圖3)。
(1)偏差e與偏差變化率ec的求取程序。
利用SUB_R指令能夠完成對系統偏差e值的有效編程,ec為基于兩次采樣數據獲得的插值,為了有效提升系統精度,保證采樣時間的恒定性,還可調用循環中斷組織塊0B35,計算并ec。
(2)偏差e與偏差變化率ec的模糊化程序。
該系統中溶解氧的變化范圍為0~10,e的變化范圍設定為[0,12]。考慮到能耗問題,為了最大程度地降低能耗,使系統控制精度得以提升,該文共采用了49個實驗數據,論域E對應的變化范圍為[-3,3],按照前述公式可將偏差e線性轉換得到論域E:
(4)
可得對應的比例因子為0.5。文章篇幅限制,該文并未對e、ec的模糊化程序進行詳細闡述。
(3)模糊規則庫的存儲數據程序。
該系統的實驗數據共計49個,考慮到數據存儲以及尋址等問題,筆者將所有數據保存在DB數據塊中。
(4)模糊尋址求取調節量程序。
該程序需要完成的首要工作就是實現對模糊論域元素{-3,-2,-1,0,1,2,3}的轉換,經過轉換后得到{0,1,2,3,4,5,6},隨后通過固定地址加指針動態尋址將U寫入至固定的DB塊中。
(5)調節量去模糊化求取準確值程序。
通過前述操作程序,調節量的值已被傳送至固定地址,隨后需要進行的就是使其與比例因子相乘實現清晰化,整個程序完成。
參考文獻
[1] 吳順麗,王孟平,李昊楠,等.污水處理中溶解氧的單神經元PID控制算法設計與實現[J].河南科學,2018,36(10):1516-1520.
[2] 王雨萌.基于智能控制策略的污水處理控制系統[D].浙江大學,2018.
[3] 王德望,趙敏.污水處理系統溶解氧的BP-PID控制算法[J].軟件導刊,2018,17(2):68-70,73.
