采用變分法的遙感影像條帶噪聲去除
2019-03-08 10:30:18王昶王旭紀(jì)松
西安交通大學(xué)學(xué)報(bào) 2019年3期
王昶,王旭,紀(jì)松
(1.遼寧科技大學(xué)土木工程學(xué)院,114051,遼寧鞍山;2.信息工程大學(xué)地理空間信息學(xué)院,450001,鄭州;3.遼寧林業(yè)職業(yè)技術(shù)學(xué)院林學(xué)院,110101,沈陽(yáng))
受遙感載荷探測(cè)器成像機(jī)理及外界環(huán)境影響,遙感影像時(shí)常受到條帶噪聲污染[1-2],因此在對(duì)遙感影像進(jìn)行分析與應(yīng)用之前,必須去除條帶噪聲。在過去的幾十年里,國(guó)內(nèi)外學(xué)者提出了許多去除條帶噪聲的方法,如基于濾波方法、基于統(tǒng)計(jì)匹配方法等。傅里葉變換濾波法[3]及小波變換濾波法[4]是典型的濾波方法。傅里葉變換濾波法通過分析條帶噪聲的頻率,采用合適的濾波器檢測(cè)并去除條帶噪聲,但由于很難找到一個(gè)能將信號(hào)與噪聲有效分離的頻率,從而導(dǎo)致條帶噪聲去除不徹底。小波變換濾波法通過確定的閾值及閾值函數(shù)來去除條帶噪聲,但由于閾值選取的不確定性,會(huì)導(dǎo)致條帶噪聲去除不徹底或影像的細(xì)節(jié)信息丟失。文獻(xiàn)[5]提出了一種把小波濾波法與傅里葉濾波法相結(jié)合的組合濾波方法,雖然該方法可以有效去除條帶噪聲[5],但在去除條帶噪聲時(shí)會(huì)丟失影像細(xì)節(jié)。基于統(tǒng)計(jì)匹配的方法根據(jù)條帶噪聲行與非條帶噪聲行灰度統(tǒng)計(jì)特性的差異來去除條帶噪聲。直方圖匹配和矩匹配是典型的統(tǒng)計(jì)匹配方法,它們分別根據(jù)像元灰度的差異及像元灰度矩的差異來去除條帶噪聲。然而,這類方法過度依賴灰度統(tǒng)計(jì)數(shù)據(jù)集,從而使條帶噪聲去除不徹底[6-9]。
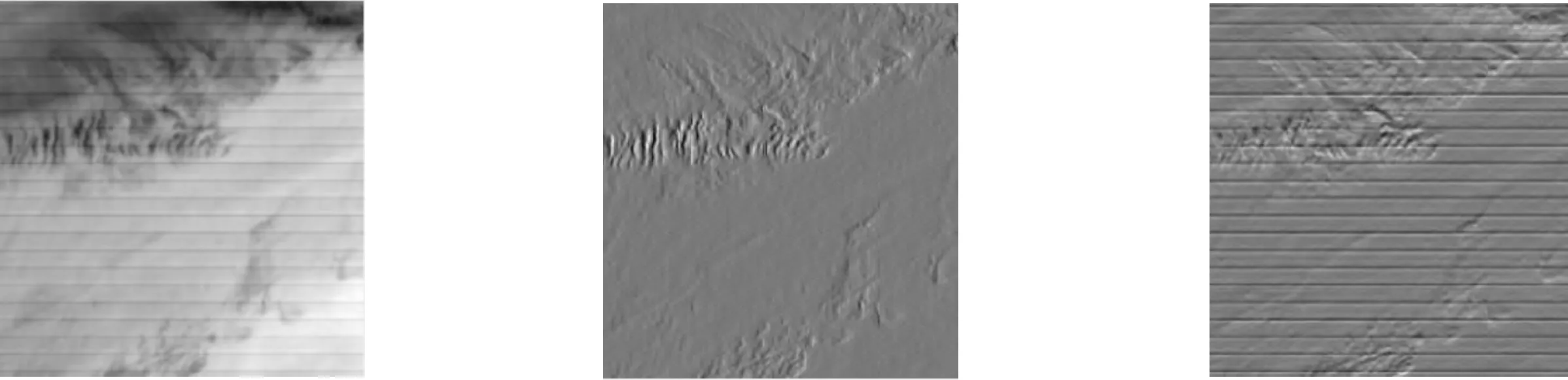
(a)MODIS 33影像 (b)圖1a水平梯度 (c)圖1a垂直梯度圖1 MODIS 33影像及梯度圖
近年來,學(xué)者們提出基于變分法來去除條帶噪聲,如文獻(xiàn)[10]根據(jù)條帶噪聲特點(diǎn)建立了一種單向變分模型[10];文獻(xiàn)[11]提出了一種單向變分TV(total variation)與框架正則化相結(jié)合的模型[11];文獻(xiàn)[12]構(gòu)建了一種單向變分與TV-Stokes相結(jié)合的去噪模型[12];文獻(xiàn)[13]根據(jù)影像具有低秩性及條帶噪聲具有稀疏性特征構(gòu)建了條帶噪聲分離模型[13]。上述變分模型雖然可以在去除條帶噪聲的同時(shí)更多地保留影像細(xì)節(jié),但由于模型的正則化強(qiáng)度很難把控,還是會(huì)丟失影像細(xì)節(jié)。
針對(duì)條帶噪聲去除過程中容易丟失影像細(xì)節(jié)這一問題,本文構(gòu)建了兩種單向變分模型來去除條帶噪聲。通過構(gòu)建的條帶去除單向變分模型可以初步獲得去噪后的近似遙感影像及條帶噪聲影像,并且避免去噪后的影像出現(xiàn)階梯效應(yīng)。為了避免影像細(xì)節(jié)丟失,通過構(gòu)建的條帶保留單向變分模型可以從條帶噪聲影像中分離出影像細(xì)節(jié)。最后,把近似恢復(fù)影像與影像細(xì)節(jié)累加得到去噪影像。
1 條帶噪聲去除方法
1.1 條帶噪聲的特點(diǎn)分析
條帶噪聲是一種結(jié)構(gòu)性噪聲,具有單向性及方向性[14]。本文以MODIS(moderate-resolution imaging spectroradiometer)第33波段Level-1B遙感數(shù)據(jù)為例,并計(jì)算其水平方向梯度和垂直方向梯度。從圖1可以看到,條帶噪聲只影響垂直方向梯度(見圖1c),而水平方向梯度(見圖1b)不受影響。為了顯示效果,對(duì)圖1b、圖1c的灰度值進(jìn)行了線性拉伸。
1.2 條帶去除單向變分模型
1.2.1 條帶去除單向變分模型構(gòu)建 經(jīng)典的單向變分模型是在TV模型的基礎(chǔ)上結(jié)合條帶噪聲的特征轉(zhuǎn)變而來的,但由于TV模型在影像平穩(wěn)區(qū)域容易產(chǎn)生階梯效應(yīng),因此首先對(duì)TV模型進(jìn)行改進(jìn),建立一種具備同性擴(kuò)散及異性擴(kuò)散能力的TV正則化模型,然后在改進(jìn)的TV模型基礎(chǔ)上結(jié)合條帶噪聲特征來構(gòu)建條帶去除單向變分模型。改進(jìn)的TV模型表達(dá)式如下
(1)
式中:U表示去噪后的遙感影像;F表示含條帶噪聲的遙感影像;V表示條帶噪聲;λ0表示正則項(xiàng)參數(shù)。
式(1)的歐拉-拉格朗日表達(dá)式為
2λ0(U-F)-

(2)
對(duì)式(2)進(jìn)行擴(kuò)散能力分析。首先對(duì)影像局部結(jié)構(gòu)進(jìn)行分解,建立直角坐標(biāo)系(τ,n),從而將式(2)寫成
2λ0(U-F)-[T1(|U|)Utt+
T2(|U|)Unn]=0
(3)
式中:Utt和Unn分別表示沿切線和法線方向的二階導(dǎo)數(shù);T1(|U|)和T2(|U|)分別表示沿切線和法線方向的擴(kuò)散函數(shù),其控制著沿切線和法線方向的擴(kuò)散強(qiáng)度
T1(|U|)
(4)
T2(|U|)
(5)
根據(jù)式(1)建立條帶去除單向變分模型如下
(6)
式中等號(hào)右邊第1項(xiàng)為保真項(xiàng),第2項(xiàng)是保持U和F在條帶方向梯度一致,第3項(xiàng)表示對(duì)條帶噪聲垂直方向梯度進(jìn)行懲罰。
1.2.2 方法優(yōu)化 式(6)對(duì)應(yīng)的歐拉-拉格朗日方程[15-16]為
(7)
將影像定義域Ω離散化,設(shè)定x=ik,y=jk,取k=1,則式(7)的離散形式為
λ1(U-f)+D-x(D+x(U-F))+
(8)
式中
(D±xU)i,j=±(Ui±1,j-Ui,j)/k
(D±yU)i,j=±(Ui,j±1-Ui,j)/k
(Dx0U)i,j=(Ui+1,j-Ui-1,j)/2k
(Dy0U)i,j=(Ui,j+1-Ui,j-1)/2k
采用不動(dòng)點(diǎn)Gauss-Seidel迭代法對(duì)式(8)進(jìn)行求解,得到式(6)的遞推公式為
(9)
對(duì)影像邊界上的點(diǎn)采用Neumann邊界條件,即
(10)
式中:i、j分別為列索引和行索引;M×N表示影像U的大小。
1.3 條帶保留單向變分模型
1.3.1 條帶保留單向變分模型構(gòu)建 由于無法把控條帶去除單向變分模型的正則化強(qiáng)度,因此通過此模型去除條帶噪聲時(shí)會(huì)丟失影像細(xì)節(jié),而丟失的影像細(xì)節(jié)包含在條帶噪聲影像中。為了避免影像細(xì)節(jié)丟失,構(gòu)建條帶保留單向變分模型如下
(11)
式中:等號(hào)右邊第1項(xiàng)為保真項(xiàng),第2項(xiàng)是保持條帶噪聲影像和條帶噪聲在水平方向梯度一致,第3項(xiàng)表示對(duì)條帶噪聲水平方向梯度的懲罰;s表示條帶噪聲;S表示近似條帶噪聲影像;u表示細(xì)節(jié)信息。
1.3.2 方法優(yōu)化 式(11)對(duì)應(yīng)的歐拉-拉格朗日方程為
(12)
將影像定義域Ω離散化,同樣設(shè)定x=ik,y=jk,取k=1,則式(12)的離散形式為
λ1(s-S)+D-x(D+x(s-S))+λ0D-x(D+xs)=0
(13)
式中D+x、D+y分別表示在x、y方向前向一階差分算子,D-x、D-y分別表示在x、y方向后向一階差分算子
(D±xs)i,j=±(si±1,j-si,j)/k
(D±ys)i,j=±(si,j±1-si,j)/k
利用不動(dòng)點(diǎn)Gauss-Seidel迭代法對(duì)式(13)進(jìn)行求解,得到式(11)的遞推公式為
(14)
對(duì)影像邊界上的點(diǎn)采用Neumann邊界條件,即
(15)
2 實(shí)驗(yàn)與分析
本文實(shí)驗(yàn)選擇的4幅遙感影像為:帶有隨機(jī)條帶噪聲的MODIS第30波段Level-1B遙感數(shù)據(jù);帶有周期性條帶噪聲的MODIS第33波段Level-1B遙感數(shù)據(jù);帶有周期性條帶噪聲的Landsat TM(thematic mapper)第3波段遙感數(shù)據(jù);帶有周期性條帶噪聲的航空影像數(shù)據(jù)。本文中關(guān)于遙感影像條帶噪聲去除的實(shí)現(xiàn)及主客觀評(píng)價(jià)指標(biāo)的計(jì)算均采用Matlab2016軟件完成,
執(zhí)行運(yùn)算的筆記本電腦是
Inter(R)Core(TM)i5-5200U CPU@2.20 GHz處理器,4 GB內(nèi)存。
首先,采用條帶去除單向變分模型進(jìn)行條帶噪聲初步分離,為了顯示效果,對(duì)條帶噪聲影像的灰度值進(jìn)行線性拉伸,實(shí)驗(yàn)結(jié)果如圖2所示。
從圖2中可以看到,經(jīng)條帶去除單向變分模型去噪后,分離出的近似MODIS 30影像、近似MODIS 33影像、近似TM影像及近似航空影像都不受條帶噪聲污染(見圖2b、圖2e、圖2h及圖2k),而從條帶噪聲影像(見圖2c、圖2f、圖2i及圖2l)中可以看到,除條帶噪聲外還包含少量影像細(xì)節(jié),說明條帶去除單向變分模型在去除條帶噪聲時(shí)丟失了影像細(xì)節(jié)。
為了避免影像細(xì)節(jié)丟失,采用條帶保留單向變分模型去除條帶噪聲影像中的細(xì)節(jié)信息。為了顯示效果,對(duì)條帶噪聲影像、條帶噪聲及細(xì)節(jié)信息的灰度值進(jìn)行線性拉伸,實(shí)驗(yàn)結(jié)果如圖3所示。
從圖3中可以看到,條帶保留單向變分模型可以有效去除條帶噪聲影像中的細(xì)節(jié)信息而只保留條帶噪聲(見圖3b、圖3e、圖3h及圖3k),再通過條帶噪聲影像與條帶噪聲相減從而獲得細(xì)節(jié)信息(見圖3c、圖3f、圖3i及圖3l)。把近似MODIS 30影像、近似MODIS 33影像、近似TM影像及近似航空影像分別與細(xì)節(jié)信息累加得到去噪影像,并與文獻(xiàn)結(jié)果[3,7,12,14-16]進(jìn)行比較。為了顯示效果,對(duì)不同方法對(duì)應(yīng)的殘差圖灰度值進(jìn)行線性拉伸,實(shí)驗(yàn)結(jié)果如圖4所示。
從圖4可以看到:經(jīng)文獻(xiàn)[3]方法去噪后,條帶噪聲被有效去除,但去噪后的影像出現(xiàn)模糊;經(jīng)文獻(xiàn)[7]方法去噪后,條帶噪聲去除不徹底;經(jīng)文獻(xiàn)[12][14]方法去噪后,雖然條帶噪聲被有效去除,但由于對(duì)影像某些區(qū)域的處理過于平滑,從而導(dǎo)致影像對(duì)比度下降;經(jīng)文獻(xiàn)[15][16]及本文方法去噪后,不僅可以有效去除條帶噪聲,而且去噪后的影像視覺效果較好。從不同方法對(duì)應(yīng)的殘差圖(見圖4b、圖4d、圖4f、圖4h)可以看到,本文方法所對(duì)應(yīng)的殘差圖中只包含條帶噪聲,基本沒有影像細(xì)節(jié),而其他方法所對(duì)應(yīng)的殘差圖中都存在少量影像細(xì)節(jié)。

(a)MODIS 30 (b)近似MODIS 30(c)近似條帶噪聲 (d)MODIS 33 (e)近似MODIS 33(f)近似條帶噪聲

(g)TM (h)近似TM (i)近似條帶噪聲 (j)航空 (k)近似航空 (l)近似條帶噪聲圖2 含條帶噪聲的遙感影像初步分離結(jié)果示意圖

(a)近似MODIS 30 (b)條帶噪聲 (c)細(xì)節(jié)信息 (d)近似MODIS 33 (e)條帶噪聲 (f)細(xì)節(jié)信息

(g)近似TM (h)條帶噪聲 (i)細(xì)節(jié)信息 (j)近似航空 (k)條帶噪聲 (l)細(xì)節(jié)信息圖3 條帶噪聲影像的分離結(jié)果示意圖

(a)MODIS 30條帶噪聲去除

(b)MODIS 30條帶噪聲去除殘差圖

(c)MODIS 33條帶噪聲去除

(d)MODIS 33條帶噪聲去除殘差圖

(e)TM條帶噪聲去除

(f)TM條帶噪聲去除殘差圖

(g)航空條帶噪聲去除

(h)航空條帶噪聲去除殘差圖圖4 不同方法的去噪結(jié)果及對(duì)應(yīng)的殘差圖
本文除了主觀上采用直觀影像視覺效果外,客觀上采用影像質(zhì)量提升因子If[8]及影像扭曲度Id[10]等指標(biāo)進(jìn)行評(píng)價(jià),并計(jì)算各種去噪方法的效率,結(jié)果如表1所示。
從表1可以看到,本文方法的If及Id值高于其他對(duì)比方法,說明本文方法能在影像扭曲較小的情況下完全去除條帶噪聲,并且去噪后的影像質(zhì)量提升程度最大。從不同方法的計(jì)算效率來看,文獻(xiàn)[3]方法計(jì)算時(shí)間最短,文獻(xiàn)[7]方法最長(zhǎng)。由于本文方法是分兩個(gè)步驟去除條帶噪聲的,所以計(jì)算效率較其他方法低,但高于文獻(xiàn)[7][15]兩種方法。
3 結(jié) 論
為了避免條帶噪聲去除過程中丟失影像細(xì)節(jié),本文構(gòu)建了一種綜合兩種單向變分模型的組合條帶噪聲去除方法,此方法可以有效去除MODIS影像、TM影像及航空影像上的條帶噪聲。與其他方法相比,本文方法在保留影像細(xì)節(jié)及影像質(zhì)量提升兩方面都是最優(yōu)的。
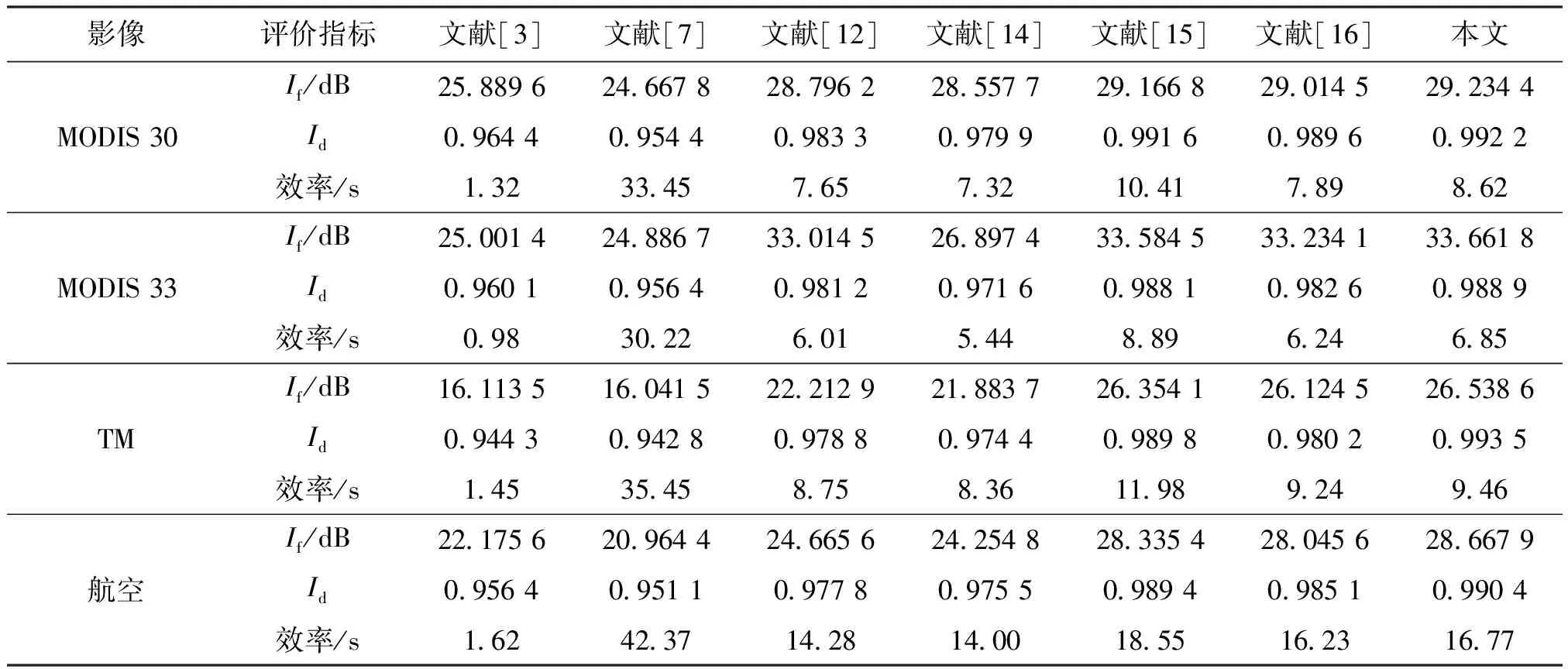
表1 不同去噪方法的客觀評(píng)價(jià)指標(biāo)統(tǒng)計(jì)結(jié)果及效率
本文方法雖然在去除條帶噪聲時(shí)能更好地保留影像細(xì)節(jié)信息,但由于此方法分兩個(gè)步驟來去除條帶噪聲,因此會(huì)導(dǎo)致計(jì)算效率較其他方法低。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
家庭影院技術(shù)(2020年10期)2020-12-14 07:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生優(yōu)秀作文(低年級(jí))(2018年10期)2018-10-13 01:56:50
Coco薇(2016年10期)2016-11-29 19:59:58
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
