農業裝備升降裝置非接觸式光纖位移傳感器設計與試驗
2019-03-06 09:07:22盧建中孟凡勇鹿利單祝連慶
農業機械學報 2019年2期
關鍵詞:結構
閆 光 盧建中 孟凡勇 鹿利單 祝連慶
(1.北京信息科技大學儀器科學與光電工程學院, 北京 100192;2.北京信息科技大學光纖傳感與系統北京實驗室, 北京 100016)
0 引言
大型拖拉機、高效聯合收獲機等高端農業裝備及關鍵核心零部件的信息采集、精準作業、智能決策是推進形成面向農業生產信息化的重要內容,被列為中國制造2025十大重點突破領域之一[1-3]。位移是較為容易測得的物理量,通過相關知識的轉化,可以得到諸如應變、溫度、加速度、應力等所需工程數據[4-5],且位移與其他物理量相比,更容易獲得較高精度數據,因此位移量的監測是工程測量技術中最基本的測量參數。
傳統的電測位移方法在實際工程中不具有抗電磁干擾能力、難以組網復用,所以光纖傳感器應運而生[6-7]。光纖具有靈敏度高、體積小、質量輕和不受外界環境電磁輻射干擾等優點,在工程應用中可以有很大的自由空間[8]。
光纖位移傳感器測量簡單便捷,國內外科研工作者對其做了大量研究。ZOU等[9]提出了由光纖光柵、雙芯光纖和彈簧組成的用于位移測量的級聯彈簧系統,測量范圍達到10 mm;賈旻等[10]利用待測位移量可由反射光強變化得出的原理設計了基于反射式塑料光纖位移傳感器,在0~3 mm位移范圍內測量輸出與實際位移呈線性關系,靈敏度為2.13 mV/μm;張燕君等[11]設計了一種基于懸臂梁結構的可調量程拉繩式光纖光柵位移傳感器,傳感器量程達到60 mm,靈敏度為47.7 pm/mm;ZHU等[12]使用兩個FBG位移傳感器,結合磁場搭建的非接觸位移系統,實現了全范圍、非接觸、排除溫度影響的位移測量;BABAEV等[13]基于磁光效應非接觸光纖位移傳感器的算法研究,在50 mm測量范圍內,非線性度不超過0.01%。
雖然近年來位移傳感器發展十分迅速,但在農業設備信息監測中[14],上述位移傳感器的量程范圍僅限于納米、微米、毫米、厘米級,這些特性限制了光纖在寬量程測量中的應用,而寬量程高靈敏度位移測量在實際工程領域中十分重要。本文提出基于Peanut-shape的邁克爾遜干涉結構的光纖位移傳感器,將高精度、高靈敏度的全纖式邁克爾遜干涉結構與磁場相結合,由磁尺長度實現寬量程的測量。
1 傳感測量原理與永磁陣列強度分析
光纖全纖式Peanut-shape邁克爾遜干涉結構如圖1所示。

圖1 Peanut-shape干涉結構示意圖Fig.1 Diagram of Peanut-shape interference structure1.入射光 2.纖芯光 3.包層光 4.反射光
光纖輸入光信號在經過Peanut-shape結構處時被分為兩路光路,分別沿著纖芯和光纖的高階包層膜進行傳輸,兩路光傳輸一段距離后到達光纖最終端面并從最終端面反射回來(最終端面相當于一面反射鏡)。當在高階包層膜中反射回來的光再次經過Peanut-shape結構時,會與纖芯中的光重新耦合在一起。由于纖芯和包層的相位不同,因此會發生兩束光的干涉,即邁克爾遜干涉。所形成的邁克爾遜干涉可以用來測量許多環境參數[15]。纖芯與包層兩路光的相位差Δφ可以表示為
(1)
其中
式中 Δnneff——纖芯與包層有效折射率差


L——Peanut-shape結構與反射端面的干涉距離,m
N——干涉峰波谷或波峰階數
λ——入射波長,m
干涉譜的光強可以表示為
(2)
式中I——干涉譜光強,W
I1——纖芯光光強,W
I2——包層光光強,W
當相位差Δφ=(2N+1)π時,可以得到第N階干涉峰波谷的中心波長
(3)
2個干涉峰之間的距離(FSR)為
(4)
當作用在光纖邁克爾遜干涉結構上的應變或溫度發生變化時,纖芯與包層的有效折射率及干涉距離L都會產生變化,從而引起干涉條紋的變化,由式(3)、(4)可得
(5)


ε——作用在光纖的應變,m/℃
KT——溫度系數,nm/℃
ΔT——溫度變化量,℃
Kε——應變系數,nm
Δε——應變變化量
根據上述分析可知,基于光纖全纖式Peanut-shape邁克爾遜結構可以用來對外界參數進行測量。
利用麥克斯韋方程組和邊界條件,對磁場建立有限元分析模型,如圖2所示。

圖2 有限元分析Fig.2 Finite element analyses
對磁尺陣列表面的磁場及傳感探頭和邁克爾遜干涉的感應靈敏度及輸出信號進行分析。仿真模型是由等效于線性滑動的4個永磁體陣列組成的。磁尺陣列上方為傳感器探測器所在位置。通過對探測器進行移動,會使其施加的磁場和作用于Peanut-shape邁克爾遜干涉結構的應變發生變化,從而達到對位移的探測與信號處理。
進行有限元分析時對永磁體磁場進行靜態磁場計算與仿真。仿真計算時,空氣層厚度為6 mm,磁標距為10 mm,進行仿真的4個永磁體陣列使用的是NNSN排序,前2個永磁體呈NN排序,后2個永磁體呈SN排序,同一張圖得到兩種排序的磁場曲線仿真結果。后面試驗中則使用的均為NS交替排序方法。空氣層的磁場強度較為顯著,為了得到更可靠的結果,需要對其更為精細分割,如圖2a、2b所示。
圖2c為與磁尺的距離從0到4 mm的磁尺表面磁感應強度密度分布,每0.5 mm為一個步進。該圖中的曲線由箭頭方向不同的磁感應強度構成,橫坐標表示磁尺陣列的一段,縱坐標表示為磁感應強度。如圖2d所示,距離磁尺的距離越近,磁感應強度分布的變形就越嚴重,類似于鋸齒波;而與磁尺的距離越大,N/S排序連續磁場強度曲線越好,越接近正弦。磁力的正弦曲線計算公式可以表示為[16]
(6)
式中B——磁力振幅,N
τ——磁尺陣列N/S一個周期內的間距,m
x——傳感探測器與磁尺陣列相對移動距離,m
位移傳感器量程由磁尺陣列長度決定,磁尺陣列可根據需求無限增加,因此認為量程可無限增大。由圖2d可知,在傳感探測器與磁尺之間的距離為1~3 mm時,能夠確定理想的正弦波形。通過理論分析,可以找到最佳的磁間距來獲得更好的分辨率。
由于光纖屬于各向同性的圓柱結構,所以光纖所受到的應力可以分為3部分,沿著光纖方向的軸向應力在光纖波長變化中發揮著重要作用。
在彈性范圍內,給光纖施加軸向力,光纖受到的橫向壓縮或拉伸,可以使用胡克定律表示
(7)
式中σ——應力張量
c——彈性模量
A——橫截面積
實驗室環境,在不考慮溫度影響的情況下,聯立式(5)~(7),可以得到光纖中心波長變化與位移引起的應變之間的關系
(8)
其中
D=BKε/(Ac)
式中D——靈敏度,pm
D可以通過改變B來調整,當磁場增加或探測器與磁尺間的間隙變小時,靈敏度增高。
2 傳感器結構制作與封裝
利用光纖全纖式Peanut-shape邁克爾遜干涉結構及磁力效應進行了傳感器設計,光纖本身的Peanut-shape結構使光路產生邁克爾遜干涉結構,產生干涉光譜,傳感探頭為永磁體,負責將磁力信號轉換為位移參數的信號。磁力強度的變化會使得Peanut-shape邁克爾遜結構的干涉譜發生變化。
使用CO2激光熔接工作站(Fujikura,LZM100型)對光纖進行Peanut-shape結構制作。圖3為試驗過程中利用光纖熔接機制作出的光纖Peanut-shape結構顯微圖。
具體制作過程如下:首先將一端切平的光纖放入光纖熔接機中,對光纖端面進行熔融。系統具體參數設置如下:光纖球過渡直徑設置為180 μm,可調整偏差為5 μm,光纖直徑125 μm,預熱10 s。由于放電能量較大,會使光纖切平端面熔為一個球形。待兩根光纖球形端面制作完成后,對光纖進行熔接,形成Peanut-shape結構,構成邁克爾遜干涉。
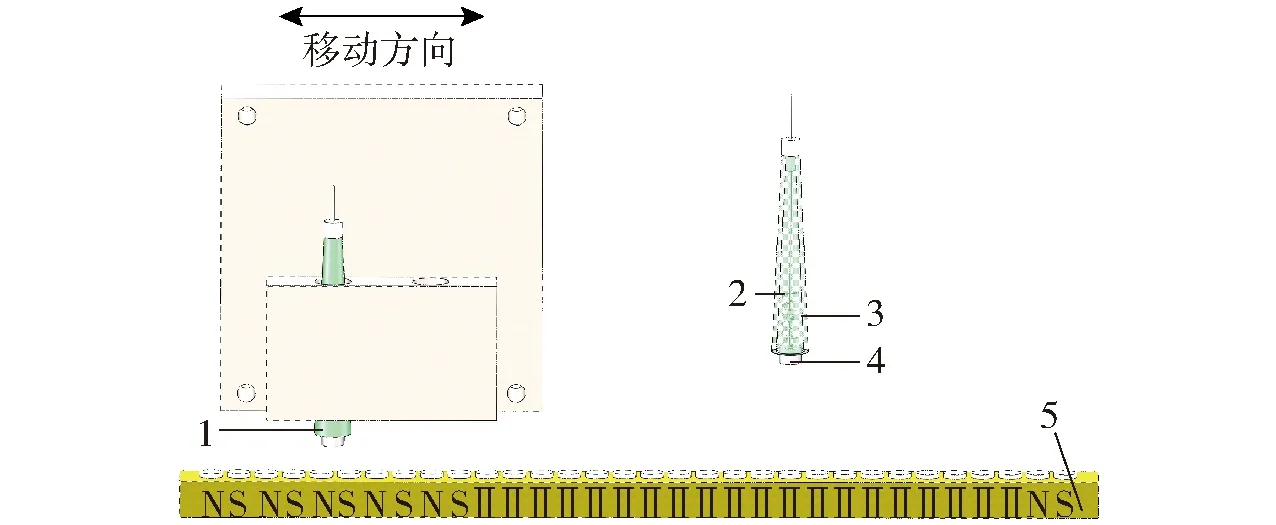
圖4 傳感器及位移平臺示意圖Fig.4 Schematic of sensor and displacement platform1.傳感器 2.彈簧 3.Peanut-shape結構 4.永磁體 5.磁尺
封裝時,將彈簧套在制作的光纖Peanut-shape結構處,彈簧長度約14 mm,使用環氧樹脂膠(DP420)將彈簧與光纖一端膠粘在永磁體表面,并置于錐形橡膠管中,在錐形橡膠管尾部套入光纖保護套管,使用環氧樹脂膠(DP420)進行膠裝。封裝完成的傳感器及位移平臺系統示意圖如圖4所示。
3 試驗與結果分析
3.1 應變標定試驗
取制作好的Peanut-shape光纖,進行應變標定試驗。將光纖粘貼于拉伸試驗件,并將拉伸件夾在MTS拉伸試驗機上,對其施加應變0~1 600 με,光譜儀采集的光譜如圖5所示。

圖5 不同應變下的光譜Fig.5 Spectrum of different strains
使用Matlab進行波谷尋峰,得到應變與中心波長的標定關系如圖6所示。

圖6 應變標定Fig.6 Strain calibration
3.2 位移試驗系統

圖7 試驗系統Fig.7 Field experimental system1.步進電機 2.控制驅動器 3.供電電源 4.光譜儀 5.光源 6.耦合器 7.微位移平臺 8.傳感器 9.磁尺
取相同規格的光纖進行封裝,對封裝完成的傳感器進行位移測試,評估傳感器性能。采用AQ6370D型光譜分析儀、光源、計算機、PSMX25系列微位移平臺、步進電機、開關電源等搭建試驗系統。整體試驗系統如圖7所示。
光源發出的光波通過耦合器進入光纖Peanut-shape邁克爾遜結構的光纖傳感器中,經反射后將光譜信號傳輸到光譜儀中,通過光譜儀對返回光譜數據的監測,能夠評價傳感器性能。傳感器的邁克爾遜干涉反射譜如圖8所示。

圖8 干涉反射譜Fig.8 Interference reflection spectrum
波峰或波谷的中心波長及偏移量可通過光譜分析儀進行監測,步進電機的電壓設為恒壓20 V,通過調節步進電機控制器(JF24D03M型)的DIP開關來控制電機速度與方向,通過不同的端口開關,可以控制不同的轉速模式及運動方向。
3.3 試驗結果分析
分析圖2d、圖5及式(6)~(8)可知,光譜儀物理分辨率固定為0.02 nm,傳感探頭與磁尺距離越近時,傳感器位移相同時所受到的力及應變ε就越大,光譜漂移量越大。縮小傳感探頭與磁尺間距離,或增加永磁體強度,即可提高測量精度與靈敏度。
分析圖6可以得到中心波長y與微應變ε的關系式為
y=0.001 82ε+1 557.294 (R2=0.997)
(9)
分析式(9)可知,Peanut-shape光纖傳感器應變靈敏度達到1.82 pm/με,是普通裸光纖的1.5倍,靈敏度得到了較大的提高,線性度為0.997。
當探測器與磁尺之間的距離過小時,位移與磁場之間的關系類似于鋸齒波。所設計的傳感器靈敏度可調,通過探測器與磁尺間距離的調整,可以改變傳感器的靈敏度,距離越近,靈敏度越高。綜合比較,探測器與磁尺間的間隙為1.5~2 mm之間時,靈敏度與反射譜波形比較合適。
試驗中,傳感器的位置由PSMX25系列精密位移平臺進行驅動與方向的控制,探測器與磁尺之間的距離為2 mm。使用Matlab對隨位移變化的其中一個波谷中心波長進行擬合。圖9試驗曲線是傳感器干涉譜波谷中心波長隨位移變化的擬合曲線,呈正弦曲線趨勢。圖2d為仿真曲線。圖9與圖2d的后半段NS仿真曲線都呈正弦曲線分布,故兩者趨勢一致。

圖9 位移與中心波長關系擬合曲線Fig.9 Fitting diagram of relation between displacement and central wavelength
擬合曲線的公式可以表示為
(10)
分析圖9及式(10)可知,封裝完成的光纖Peanut-shape邁克爾遜干涉位移傳感器靈敏度高,線性擬合度達0.999,最大波長偏移量為0.982 3 nm,制作的Peanut-shape光纖傳感器應變靈敏度為1.82 pm/με,即應變測量可以達到545.7 με。
位移傳感器方向辨別,可通過兩個傳感器形成正弦余弦曲線相互作用,或對磁尺永磁鐵的序列排序編碼實現[12,17]。
由文獻[12]可知,將兩個傳感器并排在磁尺上方,兩傳感器探頭間隔為(1/4+n)個永磁體距離,1號傳感器在位移時得到的數據擬合為正弦波,2號傳感器數據擬合為余弦波。當正方向移動時,1號傳感器領先于2號傳感器90°相位差,反之,2號傳感器領先于1號傳感器90°相位差,通過觀察擬合數據的相位,可以得出傳感器的移動方向。
由文獻[17]電磁柵位移傳感器設計可知,對磁尺上的永磁體進行霍爾編碼排序,N、S極輸出高低電平,對應不同的三位、四位編碼。通過編碼與查表的方式及觀察光譜的變化,可以判定傳感器的運動方向,后續試驗會繼續驗證。
4 應用舉例
聯合收獲機作業時,需要調節割茬高度,割臺必須升降方便。割臺升降油缸采用液壓裝置,在使用時,升降的距離十分重要,若出現故障,會造成很大的安全和經濟損失,因此需要對升降距離進行實時監測。
以北京-2.5型聯合收獲機為例,將Peanut-shape邁克爾遜干涉光纖位移傳感器應用于割臺升降裝置中,如圖10所示。

圖10 割臺升降裝置Fig.10 Lifting device of cutting table1.頂桿 2.永磁體 3.傳感器 4.缸體 5.彈簧 6.柱塞 7.卡箍
將割臺柱塞開一橫槽,置入永磁體陣列,形成磁尺裝置,傳感器固定在卡箍,懸于磁尺上方,構成位移測試系統。當柱塞活動時,可對升降位移參數進行實時監測。
5 結論
(1)提出一種基于光纖全纖式Peanut-shape邁克爾遜干涉結構,設計了一種非接觸式光纖位移傳感器,該結構與傳統位移傳感器相比,易于制作,成本低,封裝簡單,并可結合磁場進行仿真。數值仿真模擬表明,傳感器探頭和磁尺之間的間隙對傳感器靈敏度與輸出曲線有一定影響。傳感器量程由磁尺陣列長度決定。
(2)對傳感器進行測試,建立了應變標定系統與位移測試系統。Peanut-shape邁克爾遜干涉的光纖傳感器應變靈敏度達到1.82 pm/με,線性度為0.997;位移光譜曲線與仿真結果一致,線性擬合度為0.999,可測量應變達到545.7 με。
(3)通過減小傳感探頭與磁尺的間距或提高磁場強度可以提高靈敏度系數,使得傳感器具有較高精度與靈敏度。在仿真曲線和試驗擬合曲線中都可以觀察到很好的中心波長與位移曲線關系。此外,傳感器靈敏度和測量范圍都可以通過改變設備的尺寸進行調節。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50