基于RGB-D相機的油菜分枝三維重構與角果識別定位
2019-03-06 09:07:10徐勝勇潘禮禮劉泰格周雨欣
農業機械學報 2019年2期
關鍵詞:深度
徐勝勇 盧 昆 潘禮禮 劉泰格 周雨欣 汪 波
(1.華中農業大學工學院, 武漢 430070; 2.農業部長江中下游農業裝備重點實驗室, 武漢 430070;3.華中農業大學植物科學技術學院, 武漢 430070)
0 引言
角果對油菜產量起重要決定作用,它不僅是油菜吸收和積累光合產物的庫器官,而且還是為種子發育提供營養的源器官。在油菜高產育種中,單位面積角果數是大面積生產中調節潛力最大的產量因素,對油菜產量具有特殊的意義。對油菜來講,決定其產量形成的關鍵因子主要有單株角果數、每角粒數和千粒質量[1]。三維重建技術通過在計算機中對作物植株進行數字化建模,將植株外形和器官的三維信息存儲在計算機中,使得對作物生長規律的定量化研究成為可能[2]。成熟期油菜分枝三維空間模型的建立,將為計算機考察角果提供重要的基礎數據。
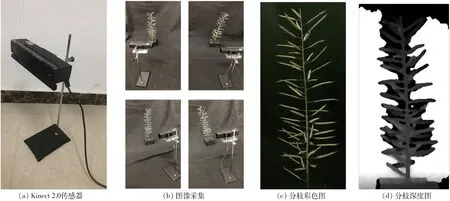
圖1 使用Kinect傳感器采集的油菜分枝圖像Fig.1 Images of rape branch collected using Kinect sensor
快速、低成本、精確的三維掃描技術一直是計算機視覺領域研究的熱點[3]。目前,應用于農業三維重建的設備和技術主要包括激光掃描儀、立體視覺、運動恢復結構和RGB-D相機等[4-14]。Kinect傳感器是一種經典的RGB-D相機,能夠同時獲取目標的彩色、紅外和深度信息,具有成本低廉、體積小巧的特性和優勢,使得該傳感器在現代農業信息領域獲得了推廣和應用[15]。3D點云配準是使用Kinect傳感器進行三維建模的關鍵技術環節之一,可以將多個視角下的點云融合為單個參考點云[16]。眾多學者對此進行了研究[17-18]。
人工方式測量成熟期油菜植株表型參數存在效率較低、主觀因素強、可重復性差、損害植株、某些參數無法測量等缺點。YANG等[19]提出一種基于法向矢量的三維點云分割方法,使用3D掃描儀來獲得角果期油菜植株的3D點云數據,為后續表型參數無損測量奠定了基礎。該方法使用了價格昂貴的激光掃描儀,且后續的數據處理較為復雜,也無法將角果點云從植株點云中有效分割出來以進行后續處理。本文提出一種低成本、高精度的成熟期油菜分枝三維數字化解決方案。以一定角度(約90°)間隔旋轉油菜分枝,使用Kinect傳感器獲取4個視角下的彩色圖像和深度圖像,進行圖像預處理獲取分枝的表面點云,并進行初始和精確兩次配準,得到完整的分枝點云。然后對基于該三維重建方法得到的分枝點云進行聚類分割,得到單個角果并統計角果數量。
1 材料與方法
1.1 實驗設備與信息采集
2018年5月于華中農業大學實驗田采集成熟期油菜植株,品種為中雙6號和大地55,人工將分枝剪下。在自然光照的室內進行圖像采集,油菜分枝被固定在一個底座上,背后放置一塊黑色幕布。使用Kinect 2.0傳感器對油菜分枝進行拍攝,距離約60 cm,得到彩色圖像(1 920像素×1 080像素)和深度圖像(512像素×424像素)各10幅。每拍攝完一個角度,手動將放置角果的底座旋轉約90°,直到完成4個角度的圖像采集,圖像采集示意圖如圖1所示。利用微軟公司提供的軟件開發工具包Kinect for Windows SDK 以及應用程序編程接口API,融合植株的彩色和深度圖像,獲得植株在相機空間坐標系中具有顏色信息的三維坐標數據,待后續處理。本文算法開發和測試的平臺為通用計算機(酷睿6代i5 4200M主頻2.5 GHz處理器、8 GB DDR3內存、250 GB三星固態硬盤、NVIDIA GeForce GT 755M 顯卡)、Windows 7專業版SP1和VS 2013+OpenCV 3.2+PCL 1.80,以及Matlab 2017b。
1.2 單視角點云的獲取
1.2.1彩色圖像預處理
本研究中,除了油菜分枝其他都是背景。因為油菜分枝整體呈現黃綠色,而背景幕布主色調是黑色,因此先對分枝的彩色圖像進行2G-R-B的閾值分割,從背景中初步分離出油菜分枝,得到分枝區域的掩模。使用該掩模與原彩色圖像相乘,再對乘積圖像的綠色通道進行Otsu閾值分割,最后得到準確而完整的油菜植株彩色圖像。
1.2.2彩色圖像對齊到深度圖像
深度圖像中保存有物體距離相機的距離信息,同時也有平面位置信息,可以通過對深度圖像進行像素點操作來獲取點云。通過調用Kinect for Windows SDK中的映射函數實現彩色圖像和深度圖像的對齊,建立彩色圖像中的像素點與深度圖像中的像素點的索引關系。根據預處理后得到的油菜分枝彩色圖像,可以獲得植株區域對應的深度圖像。
1.2.3深度圖像轉換為3D點云
圖像的度量單位是像素,而表型參數用物理尺寸單位(mm)度量。需要將深度圖像的像素轉換為三維空間坐標,即3D點云。依照Kinect成像原理,轉換公式為
(1)
式中 (Xd,Yd,Zd)——點(u′,v′)對應的三維空間坐標
(u′,v′)——深度圖像的任意一點像素坐標
Dd(u′,v′)——點(u′,v′)對應的深度
(fUIR,fVIR)——紅外相機的焦距,取值為(371.5 mm,371.5 mm)
(uOIR,vOIR)——紅外相機的光心坐標,取值為(256 mm,212 mm)
Kinect傳感器在工作時有系統噪聲和波動,導致每一幅深度圖像的數據都不一樣。連續靜止拍攝 10 幀深度圖像,疊加進行融合,可以有效消除波動和噪聲,還可以初步補全點云數據。本文每幀深度圖得到的植株點云大約有4 000個點,10幀融合后約40 000個點。
1.2.4點云濾波
多幀數據疊加的融合方法會在目標物體邊緣產生部分離群點噪聲。此外,因光照影響導致紅外線不能正常反射到傳感器,點云會出現小區域噪點。本文采用統計濾波器對點云進行濾波。使用KD-tree搜索算法查找點Pi(xi,yi,zi)(i=1,2,…,n)的空間臨近點Pj(xj,yj,zj)(j=1,2,…,n),求解空間點Pi與其臨近點Pj的平均距離di、全局距離平均值μ和標準差σ,計算公式為
(2)
式中k——臨近點數
n——點云中點的數量
如果di在[μ-ασ,μ+ασ]范圍之外,則該臨近點被定義為離群噪聲點,將其從點云集中去除。參數α和臨近點數k取決于目標點云的數量和密度,本文實驗測試發現k為50、α為1.0時濾波效果最好。
1.3 多視角點云配準
因角果和分枝之間的相互遮擋,單個視角下的點云不能完全呈現分枝的完整形態。同時,圖像預處理環節也會造成局部信息的丟失。所以需要將多個角度下的點云進行配準,融合為一個整體。對結構復雜的分枝點云,直接采用經典ICP算法[20]進行點云配準,計算量大、耗時長、錯誤匹配率高,還可能陷入局部最小值。本文提出基于經典ICP算法的改進方法,總體和初、精配準的算法流程如圖2所示。將第1個視角的點云命名為“角度1點云”,將相隔約90°的其他3個視角的點云依次命名為“角度2點云”、“角度3點云”、“角度4點云”。先將4個角度的點云依次兩兩進行初配準,再精配準。精配準得到的2個點云再次進行初、精配準,最后進行點云濾波,得到完整點云。
1.3.1點云初配準
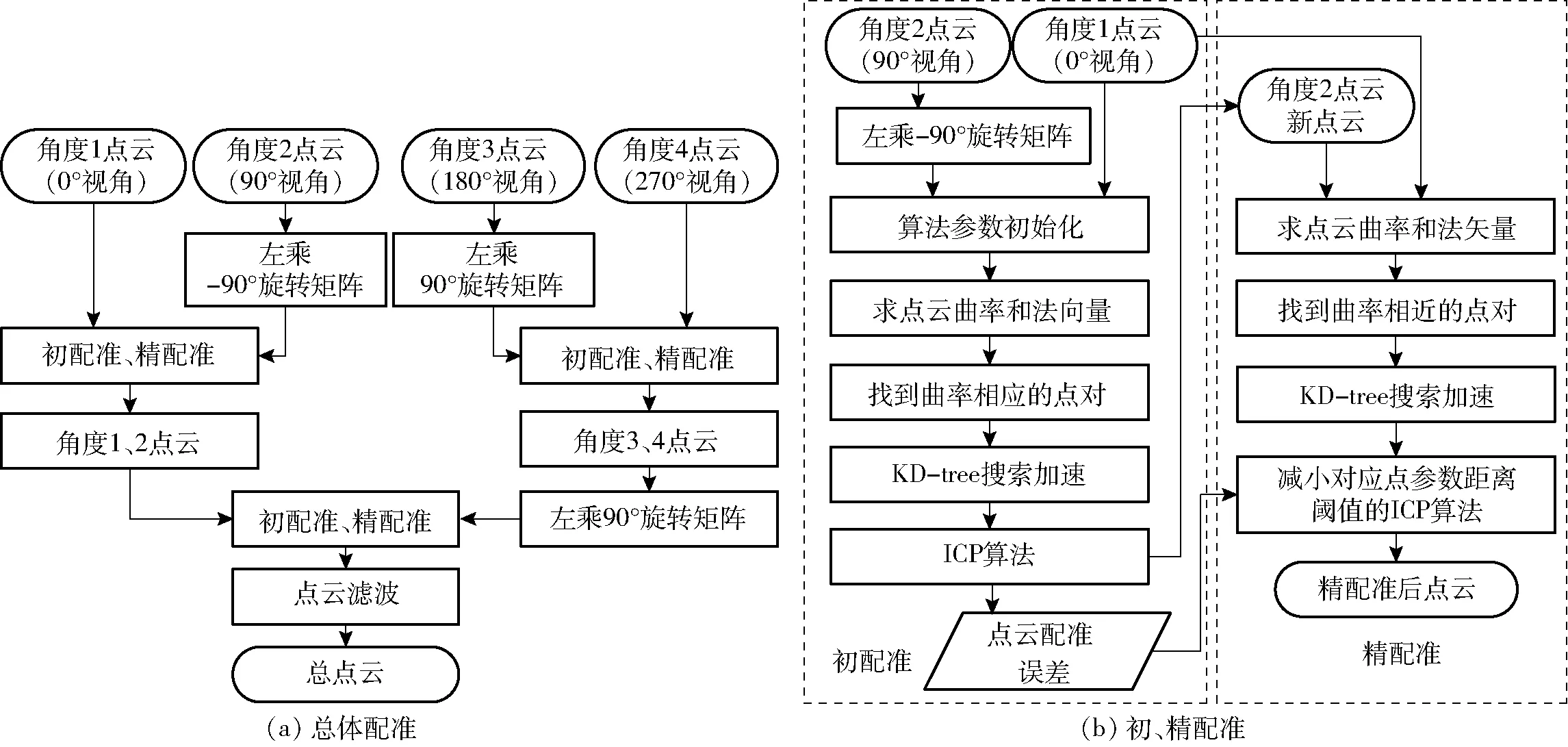
圖2 點云配準流程圖Fig.2 Flow chart of point cloud registration
經典的ICP算法中,假定點云P和X中各有NP和NX個點,ICP算法每次尋找兩個點集之間的最近點,要求其歐氏距離的平方和最小,從而計算出點云間的剛體變換。矢量q=[qRqT]表示剛體變換,其中,qR表示最優旋轉變換的單位特征向量,qT表示剛體變換平移向量,將該剛體變換應用到點云P。對應點云P中的每一個點,在點云X中尋找其最近點形成點對,計算全部最近點對的歐氏距離平方和的平均值
(3)
式中Xi——點云P在X中的最近對應點構成的坐標向量
Pi——點云P中的點構成的坐標向量
R(qR)——剛體變換的旋轉矩陣
為了最小化f(q),分別計算點云P和X的重心,并得到兩個點云的協方差矩陣ΣPX,計算公式為
(4)

(5)
式中 tr——矩陣的跡
I3——3階單位矩陣
用單位四元樹表示最優旋轉矩陣qR=[q0q1q2q3],它與矩陣Q(ΣPX)的最大特征值對應,旋轉矩陣的計算公式為
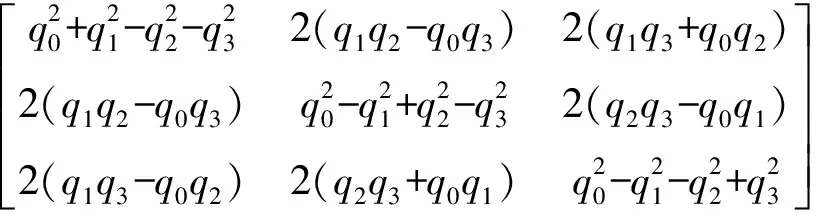
(6)
經過反復迭代,直至最近點對的歐氏距離平方和的平均值在給定閾值下收斂,完成配準。
計算點云的曲面法矢量和曲率,搜索曲率相近的點構成配對點對。在此基礎上采用KD-tree建立高維索引樹形數據結構,加速兩個點云的對應點匹配進程,再采用ICP算法配準,這樣就避免了ICP算法陷入局部最優解。若已知相鄰視角的點云旋轉角θ,可將某視角的點云P左乘以一個旋轉矩陣,使該角度的點云繞Y軸旋轉θ得到一個新點云PR,再進行配準。
(7)
處理之后,相鄰兩個角度的點云在方位上相近,可以有效加快配準的速度和成功率。本文中,在角度2配準到角度1時,θ為90°;角度3配準到角度4時,θ為-90°;角度3、4配準到角度1、2時,θ為-90°。
1.3.2點云精配準
ICP算法通過多次迭代的最近鄰搜索逐漸逼近最優結果,非常耗時。此外, ICP算法還要求兩個點云的初始位置相差不能太大。因此,如何構造參與ICP算法的有效初始點集是非常重要的。本研究中的初配準完成后,兩個點云雖然沒有很好地融合,但相互之間的距離相對較小。將點云P初配準到點云X中,初配準后P的新位置構成新的點云記為P′,同時得到2個點云之間的可匹配部分對應點的關系。對P′中的每一個非平面點,在X中選取與其曲率相近的點,搜索范圍由對應點距離閾值Dp確定,由曲率相近的點構成配對點對。再使用KD-tree重組配對點對的數據結構,采用經典ICP算法搜索配準。在ICP算法中,對應點距離閾值Dp作為初始參數,其決定了配準過程的搜索范圍。Dp設置較大,搜索不到配對點對導致無法進行初匹配;Dp設置過小,容易陷入局部最小值導致配準效果很差。在初配準中,兩個點云相互距離較大,Dp應設置得較大,避免無法進行初匹配。在精配準中,Dp應依據初配準得到的誤差測度f(q)進行設置,一般設置為初配準的0.01~0.1倍。
1.4 基于聚類算法的角果識別與數量統計
對于一幅油菜分枝的彩色圖像,采用1.2節的圖像預處理方法,得到分枝的二值圖像。角果的果柄細長,其尺寸遠小于角果。因此,定義邊長為11的矩形結構算子,對二值圖像進行形態學“開”運算,去掉角果的果柄,使得角果與主莖分離。在去除果柄的二值圖像中,主莖是最大的連通域。遍歷“開”運算結果中的連通域(8鄰域),去除面積最大的連通域,即可得到只包含角果的彩色圖像。將角果彩色圖像中非0像素點對齊到分枝深度圖像,得到只包含角果的深度圖像。處理流程和中間結果如圖3a所示。
使用本文的三維重建方法,將4個視角下的點云進行配準,得到分枝角果的融合點云。再使用歐氏聚類算法進行單個角果點云的分割,并以KD-tree的形式存儲,分割效果如圖3b所示。具體操作步驟為:
(1)輸入KD-tree形式存儲的角果融合點云,設置初始的聚類參數,設置聚類需要的最少和最多點數量(Nmin,Nmax),本文為(200,5 000),Dp用于設置聚類搜索的直徑(本文為0.3 mm)。
(2)隨機選取點云中的某個點P1(屬于某個角果),搜索離該點最近的n個點,并計算這n個點到P1的距離,將距離小于閾值Dp的點歸為Q類。
(3)在Q中除P1外找到任意一點P2,重復步驟(2)。
(4)直到沒有新點加入,完成搜索。輸出歸類的點云,可得到單個角果點云。類的數量即為角果數量。
(5)測試最佳的聚類參數。
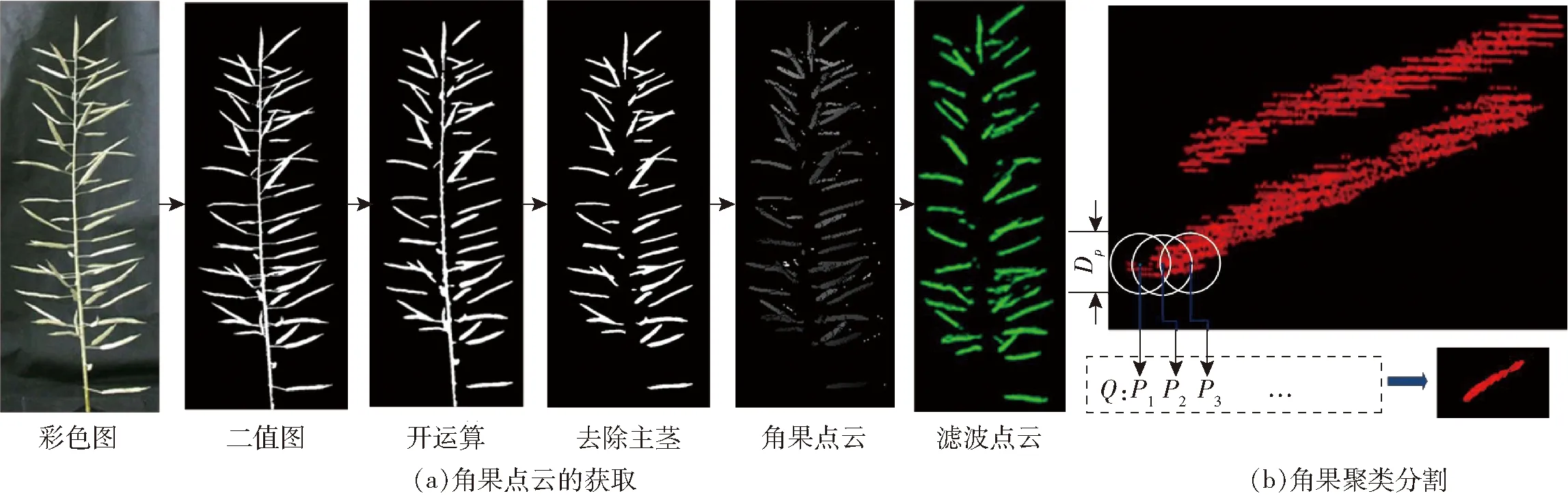
圖3 角果點云的獲取和聚類分割Fig.3 Acquisition of pod point cloud and segmentation with Euclidean distance clustering
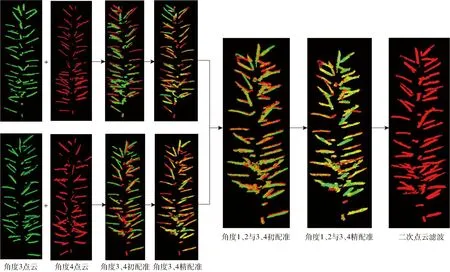
圖4 去除主莖的油菜分枝點云配準過程與結果Fig.4 Process and results of point cloud registration of rape branch without main stem
2 結果與分析
2.1 點云配準效果
使用 Kinect 傳感器獲得油菜分枝的彩色圖像和深度圖像后,融合圖像中的 RGB信息和深度信息獲得目標場景原始三維點云信息。圖4展示了4個視角濾波后的分枝點云的配準全過程。從圖4可以看出,不同視角下的點云在空間位置上存在較大差異。以角度1和角度2為例,初配準的融合點云(經典ICP配準結果)的對應位置非常靠近,但整體上顯得較為雜亂,存在許多不切合的部位。經過精配準之后,整體上改進非常大,可以明顯地觀察到角果的原始形態。在角度1、2與角度3、4的精配準點云的再配準環節,也存在類似的現象。兩個視角融合的點云經過再次初配準和精配準之后,再次進行點云濾波,最終得到了完整、精確的角果點云。
2.2 點云配準算法誤差分析
為對點云配準算法精確度進行定量分析,通過計算配準過程中對應點間平均歐氏距離,對2個點云配準誤差進行評估。2個點云之間的對應點距離越小,配準誤差越小。本文對經典ICP 算法和本文改進的ICP 算法進行了比較,結果如表1所示。從表 1可看出,本文改進的配準方法相較KD-tree加速的 ICP 算法,配準誤差從1.13 mm下降到0.42 mm,配準精度提升了62.8%。在計算時間上,本文算法相對于ICP 算法時間優化效果明顯,從223.6 s下降到124.2 s。經過對2個品種油菜大量分枝的測試,配準距離誤差均控制在0.48 mm以內,配準時間均小于147 s,因此本文算法在快速性和穩定性方面均得到了保證。由于ICP算法配準精度較低,導致離群點較多,在點云濾波環節被剔除的點數量大,最終得到的點云數量比本文算法少。

表1 點云配準算法性能測試結果Tab.1 Performance test results of two point cloud registration algorithms
2.3 角果識別與定位性能分析
為量化評估本文所提出角果識別和定位算法的準確性和穩定性,隨機選取2個品種的4個油菜植株共29個分枝進行識別,分析角果識別結果和識別正確率,識別結果如表2 所示。由表2可以看出,本文提出的方法能取得較好的處理效果,整體識別正確率不小于96.76%。本文方法識別的角果數比實際數量小,主要有2個原因:①在圖像預處理環節,某些小角果被誤剔除。②在點云濾波環節,某些角果斷裂成小塊,誤認為是離群噪聲而被剔除。一般而言,如果減小旋轉角度以更多的視角采集圖像,誤剔除的概率會減小,但計算時間會增加。

表2 角果識別與定位實驗結果Tab.2 Experiments results of pod identification and positioning
3 結論
(1)提出了改進的ICP算法,通過對ICP算法過程中近鄰搜索參數的改進,對已知大概旋轉角度的兩個視角下的點云進行兩次匹配,并采用KD-tree加速,大幅度提高了配準精度和速度。
(2)對于成熟期的油菜植株,本文提出的基于RGB-D 相機的油菜分枝三維重建方法具有較高的穩定性、準確性和實時性,結合彩色圖像分割和點云濾波處理,4個視角配準的點云精度較高,平均距離誤差均小于0.48 mm,滿足油菜角果三維重建的精度要求,單個角果的原始形態清晰可見。
(3)提出的方法可以有效分離單個角果,角果總體識別正確率不小于 96.76%。實驗結果表明,該方法能夠快速構建油菜分枝三維結構并進行高精度和高效的角果識別和定位。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57