基于模糊PID的車輛橫向穩定系統研究
2019-03-05 04:01:00李然然
汽車實用技術 2019年3期
李然然
?
基于模糊PID的車輛橫向穩定系統研究
李然然
(長安大學,陜西 西安 710064)
通過分層控制思路搭建上層與下層控制器,設計基于橫擺力矩控制的車輪橫向穩定性控制算法。上層控制器以期望的橫擺角速度和質心側偏角為目標,采用模糊PID算法得到維持汽車穩定需要的橫擺力矩,下層控制器根據需要的橫擺力矩對單側輪胎制動,從而增加乘用車極限工況下的穩定性。最后,搭建Matlab及Simulink仿真平臺,利用CarSim軟件對橫向穩定策略進行驗證,并選擇典型試驗工況仿真確定該策略能顯著改善車輛的橫向穩定性。
橫向穩定控制;橫擺角速度;質心側偏角;聯合仿真
前言
乘用車橫向穩定控制系統(ESC)是在防抱死制動系統(ABS)和牽引力控制系統(TCS)的基礎上擴展開發出的一種新型的主動安全技術。它通過主動干預橫擺力矩的方式來提高極限工況下車輛的穩定性[1]。目前,國內乘用車裝載的ESC主要由外國公司提供,而國內對該技術的研究相對滯后。橫向穩定控制常用的控制有邏輯門、PID控制和模糊控制[2],本文采用模糊PID控制理論,利用Carsim軟件對整車模型進行車輛動力學仿真,驗證了該控制方法能夠在較為惡劣的道路條件下對維持車輛橫向穩定起到一定良好效果。
1 系統模型
1.1 參考模型-線性二自由度模型
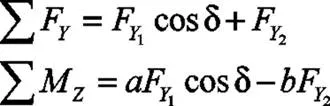
在車輛基本的轉向操作模型中,線性二自由度車輛模型是最常見的,也是目前研究中采用最多的車輛參考模型。將方向盤與輪速傳感器得到的相關參數輸入到車輛參考模型中,就可以了解駕駛意圖[3]。采用簡化的線性二自由度模型來研究汽車的橫向和橫擺兩個自由度,能夠得到理想的汽車質心側偏角和橫擺角速度[4]。由線性二自由度車輛模型可知,汽車受到的外力與力矩為:
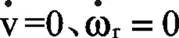
由式(1)可得二自由度汽車運動微分方程為:
式中:δ為前輪轉角;u、v分別為車輛質心處的縱向、橫向速度;k1、k2分別為前、后輪胎側偏剛度;r為汽車橫擺角速度;為汽車質心側偏角。

1.2 建立CarSim整車模型
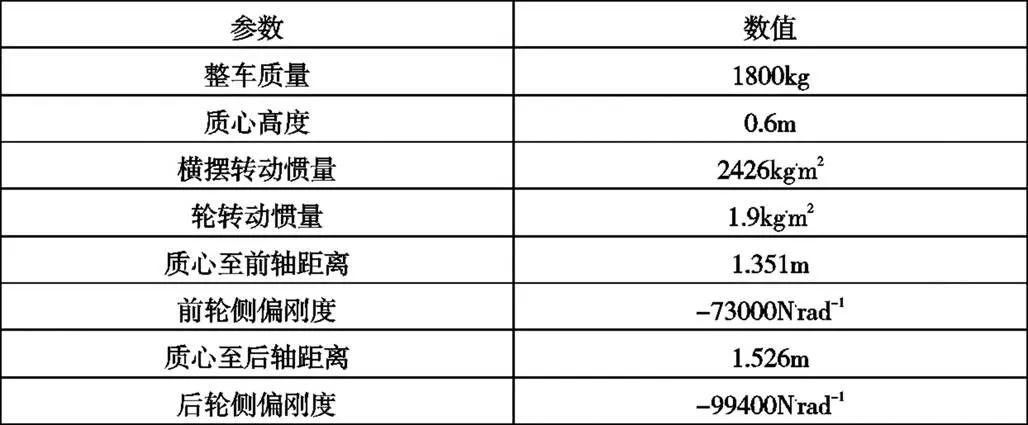
CarSim是一種面向參數化的車輛動力學仿真軟件,該軟件將整車分為若干子系統,通過選取各部件性能的參數或曲線完成軟件建模,能夠最大限度的減小了的實體建模中度的誤差,使實際的車輛特性與車輛模型更加匹配。選用該仿真軟件中的某乘用車模型,該車的主要數據,如表1所示,其余參數采用默認設置。
表1 試驗車主要參數
2 乘用車穩定性控制算法
本文采用分層控制,系統分成上層與下層控制器:上層控制器根據CarSim輸出的橫擺角速度和質心側偏角與理想橫擺角速度和質心側偏角的值,然后采用模糊PID算法得出車輛穩定所需要的橫擺力矩;下層控制器根據△選擇對應的車輪進行制動分配。通過車輛的轉向特性和地面附著系數,提出單側控制方式進行制動力矩分配,系統介入時刻根據橫擺角速度偏差△與閥值T關系判斷,使控制及時有效。該分層控制的結構如圖1所示。
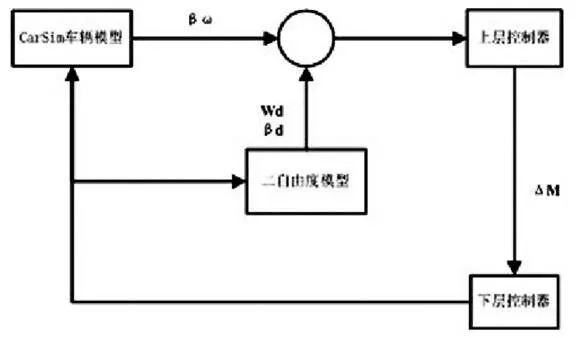
圖1 控制器控制框圖
2.1 上層控制器
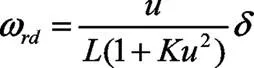
質心側偏角超過極限值時,會導致車輛出現失去穩定的情況;而橫擺角速度過大時,會導致汽車出現甩尾的情況。因此,當橫擺角速度過大而質心側偏角較小時,PID模糊算法應以控制汽車橫擺角速度為主要目標;當質心側偏角較大而橫擺角速度較小時,PID模糊算法應以控制質心側偏角為主要目標。根據式(3)、(4),在Simulink中搭建二自由度模型,得到理想的橫擺角速度與質心側偏角,與CarSim輸出值比較,得到w、β、β、w,均采用PID模糊控制。模糊PID結構圖如圖(2)所示,模糊PID控制根據輸入的E與EC,對p、K、K進行調節,滿足ESC的控制要求。模糊PID控制的語言變量模糊集設置為[NB(負大),NM(負中),NS(負小),Z(零),PS(正小),PM(正中),PB(正大)];基于橫擺角速度的模糊PID控制算法的輸入信號分別為E、EC,其中E的論域為[-0.15,0.15]EC論域[-1,1];基于質心側偏角PID控制算法的輸入信號分別為E、EC,其中E的論域為[-5°,5°],EC的論域為[-1,1];PID控制規律為:

式中:Kp、Ki、Kd為比例系數、積分系數和微分系數;e(t)和ec(t)為誤差和誤差變化率;u(t)是輸出量。
根據式(5)可得△M和△M;對二者產生的
附加橫擺力矩進行耦合:

式中,ε為分配系數,且滿足
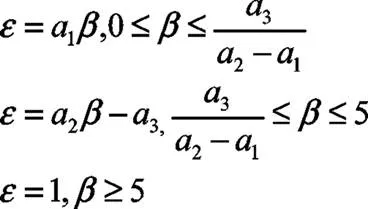
根據式(7)搭建SIMULINK仿真模型。
2.2 下層控制器
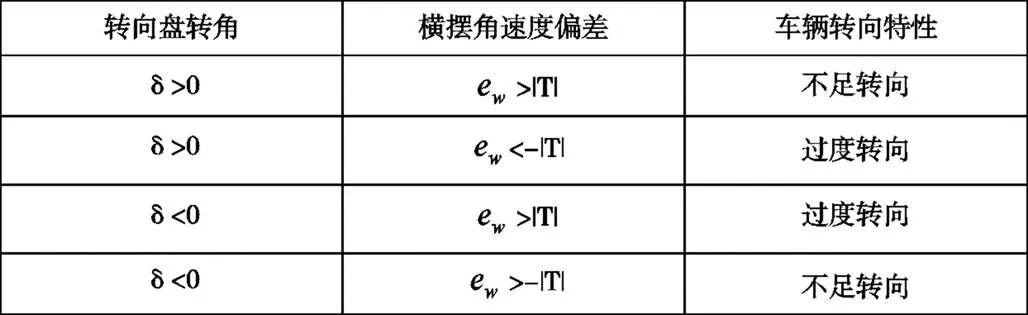
下層控制器的主要目的是實現得到的橫擺力矩△,通過判斷車輛的轉向特性,將△合理分配給對應的車輪,提高車輛的操作穩定性。轉向特性是根據前輪轉角及橫擺角速度判斷的,如表2所示。表2中,T是為防止頻繁操作。
判斷汽車的轉向特性,并把△合理分配給對應車輪。制動車輪采用業內認可的單側車輪制動,出現不足轉向,優先制動內側輪,出現過度轉向,優先制動外側輪。
表2 車輛轉向特性判斷
左側車輪控制需滿足:
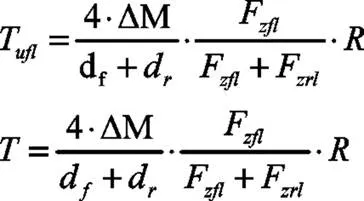
右側輪控制,需滿足:
3 仿真結果分析
在CarSim與Matlab環境下進行聯合仿真,仿真工況為在低附的路面上,汽車連續急轉彎。分別對單側車輪制動以及未干涉的汽車進行仿真。
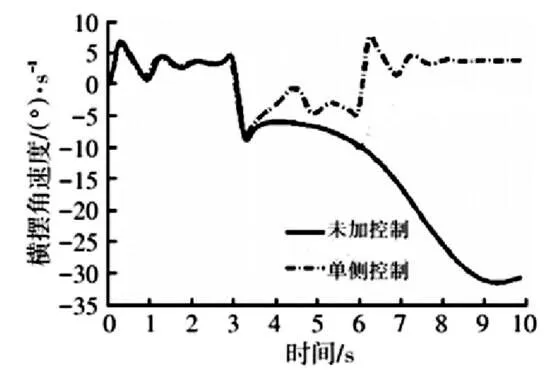
圖3 橫擺角速度
設置仿真工況參數如下:車速為120km/ h,路面附著系數為0.3,轉向角輸入幅值為120°正弦信號。圖3、圖4所示為單側車輪制動介入和無介入情況下橫擺角速度與質心側偏角對比。由圖3、圖4可知,本文采用的控制器較好的提高車輛極限工況的橫向穩定性。

圖4 質心側偏角
4 結論
本文提出的汽車橫向穩定性模糊PID控制法,采用分層控制思路搭建上層與下層控制器,通過CarSim與Simulink的仿真驗證了算法的合理性,本文的單側車輪控制算法對維持車輛在低附路面行駛的橫向穩定性起到了一定的效果。
[1] 羅虹,張立雙,來飛.車輛直接橫擺力矩控制方法研究[J].機械設計與制造, 2010(2):126-128.
[2] 吳剛院,劉丹,陳娟娟.乘用車橫向穩定性控制聯合仿真[J].汽車技術, 2018.
[3] 卓桂榮.四輪驅動電動汽車關鍵技術研究[D].2004.
[4] 肖闖.汽車穩定性控制方法仿真研究[D].湖南大學, 2007.
[5] 靳立強,劉剛,陳鵬飛.汽車電子穩定控制系統的分層控制策略及試驗[J].吉林大學學報(工), 2016, 46(6):1765-1771.
[6] Yin G D,Chen N,Wang J X, et al. A Study on μ-Synthesis Control for Four-Wheel Steering System to Enhance Vehicle Lateral Stability[J]. Journal of Dynamic Systems Measurement & Control, 2011, 133(1): 011002.
[7] Zheng L,Ye J.Analysis of the Lateral Stability for Four-Wheel Inde -pendent Driving Electric Vehicles[J].Applied Mechanics & Materi -als, 2014, 590:394-398.
[8] Wang W,Fan J, Xiong R, et al. Lateral stability control of four wheels independently drive articulated electric vehicle[C]// Transportation Electrification Conference & Expo. IEEE, 2016.
[9] 王其東[1,2],劉偉[1],陳無畏[1],et al.基于路面識別的汽車穩定系統滑模控制[J].汽車工程,2018.
[10] 孫穎.汽車電子穩定系統控制方法的研究和仿真[D].東北大學,2008.
Joint Simulation of Lateral Stability Control for Vehicle
Li Ranran
( Chang'an University, Shaanxi Xi'an 710064 )
Based on the layered control idea,the upper and lower controllers are built. lateral stability control algorithm based on yaw moment control is designed. The upper controller takes the desired yaw rate and sideslip angle as the target, using fuzzy PID algorithm to get the required yaw moment for vehicle stability.The lower controller brakes the single-sided tire according to the required yaw moment, thereby increasing stability of the passenger car under extreme conditions. Finally, the Matlab/Simulink simulation platform is built. The lateral stability strategy is verified based on CarSim software, and the typical test conditions are selected to determine that the strategy can significantly improve the lateral stability of the vehicle.
Lateral stability control; yaw rate; sideslips angle; joint simulation
A
1671-7988(2019)03-107-03
U462
A
1671-7988(2019)03-107-03
U462
李然然,就讀于長安大學,碩士在讀,研究方向:智能駕駛與主動安全。
10.16638/j.cnki.1671-7988.2019.03.033
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
