GFD和核主元分析的機(jī)械振動特征提取*
2019-02-27 01:49:40李本威吳易明
振動、測試與診斷 2019年1期
韋 祥, 李本威, 吳易明
(1.海軍航空大學(xué)航空基礎(chǔ)學(xué)院 煙臺,264001) (2.洛陽軸承研究所有限公司 洛陽,471039)
引 言
轉(zhuǎn)子系統(tǒng)是代表一類廣泛工程應(yīng)用背景的復(fù)雜機(jī)械的關(guān)鍵部分,由于材料本身的非線性物理性質(zhì)、部件之間的間隙和摩擦耦合作用、滑動軸承的油膜力、滾動軸承中的間隙和恢復(fù)力、裂紋、大位移或者大變形[1]等因素導(dǎo)致系統(tǒng)振動響應(yīng)具有強(qiáng)烈的非線性性質(zhì),采用線性分析的方法來研究系統(tǒng)的動態(tài)特性會“濾掉”許多與系統(tǒng)故障密切相關(guān)的非線性現(xiàn)象[2]。近年來,隨著非線性動力學(xué)的發(fā)展,“非線性動力學(xué)指數(shù)(最大Lyapunov指數(shù)、分形維數(shù)和熵等)”被用于機(jī)械狀態(tài)監(jiān)控和故障診斷。該趨勢說明研究者逐漸開始從振動產(chǎn)生的機(jī)理去研究系統(tǒng)的運(yùn)動狀態(tài)、運(yùn)動穩(wěn)定性、混沌及分叉等現(xiàn)象,揭示振動行為的內(nèi)在演化過程。
傳感器測得的每一個振動信號都是一種動力學(xué)結(jié)構(gòu)在一維時域空間的表現(xiàn),信號波形結(jié)構(gòu)蘊(yùn)含著參與動態(tài)變化的全部變量的信息。當(dāng)系統(tǒng)處于不同的故障狀態(tài)下,其內(nèi)在動力學(xué)結(jié)構(gòu)必然有差異。因此通過一個對動力學(xué)結(jié)構(gòu)敏感的參數(shù)對每個信號構(gòu)成的動力學(xué)結(jié)構(gòu)進(jìn)行定量化度量,即可實現(xiàn)對不同故障狀態(tài)的特征提取。分形維數(shù)用來描述具有無限精細(xì)、非常不規(guī)則、無窮自相似結(jié)構(gòu)和非整數(shù)維數(shù)的點集,是定量描述混沌吸引子的重要不變量。目前,分形維數(shù)(盒維數(shù)、信息維數(shù)、關(guān)聯(lián)維數(shù))在機(jī)械故障診斷領(lǐng)域(轉(zhuǎn)子、軸承和齒輪等)取得較大的發(fā)展[3-5]。然而,分形實際應(yīng)用中一般只考慮信號的單重分形特征,即認(rèn)為整個信號具有相同的尺度屬性,只能從整體上反映信號的不規(guī)則性,缺乏對局部奇異性的刻畫[6]。
廣義分形維數(shù)為復(fù)雜信號提供了一種集合結(jié)構(gòu)分析方法,相比單重分形維數(shù)能精細(xì)刻畫信號的局部尺度行為[7],對不同運(yùn)動狀態(tài)的動力學(xué)結(jié)構(gòu)有良好的度量和較好的區(qū)分度。相比Lyapunov指數(shù)和關(guān)聯(lián)維數(shù)等參數(shù)需要估計相空間重構(gòu)的嵌入維數(shù)和時間延遲以及大計算量等缺點[8],GFD只依賴于分割體的尺寸,有較高的計算效率。由于廣義分形維數(shù)提取的特征維數(shù)通常較高,所提取的高維特征中不乏冗余的信息,因此需對提取的高維特征進(jìn)行降維處理并實現(xiàn)不同故障的分類。
核函數(shù)主元分析通過選定的非線性核函數(shù)將輸入矢量映射到一個高維特征空間,使輸入矢量在該空間有更好的可分性,然后對高維空間的數(shù)據(jù)做主成份分析從而得到非線性主元,具有特征提取與分類器的作用[9-10]。KPCA在機(jī)械振動特征提取和分類存在以下不足。
1) KPCA特征提取與分類精度嚴(yán)重依賴初始特征的區(qū)分程度。KPCA處理之前需計算振動信號的最大峰值、絕對均值、有效值、方差、斜度和峭度等反映波形結(jié)構(gòu)的指標(biāo),進(jìn)行初步特征提取,這些指標(biāo)選取的合適與否決定了KPCA分類的精度。早期微弱故障由于損傷性很小,產(chǎn)生的故障信號不太強(qiáng)烈,在振幅和頻域上表征不明顯,常規(guī)KPCA算法難以取得滿意的效果。此外,有些種類的故障特征區(qū)分度不夠明顯,也很難取得良好的分類效果。
2) 核函數(shù)中參數(shù)選取對分類精度影響較大,需不斷調(diào)整參數(shù)以獲得高精度的分類,方法不夠穩(wěn)健。
上述原因制約了KPCA的實際工程應(yīng)用能力。
筆者提出了GFD-KPCA的故障診斷方法,綜合利用GFD和KPCA方法的優(yōu)點克服兩種方法在工程應(yīng)用上的不足,具有良好的工程應(yīng)用價值。
1 振動信號的廣義分形維數(shù)
1.1 廣義分形維數(shù)的相關(guān)概念
設(shè)μ為R上的正的概率Borel測度,對于q≠1且ε>0,定義以下積分
(1)
(2)

對于離散數(shù)據(jù),假定尺度ε的球是相空間的一個分割,記點集Ω落在尺度為ε的分割體中的概率是Piε,Renyi提出廣義熵
(3)
從而廣義維數(shù)定義為
(4)
(5)
當(dāng)q=0,1,2時,Dq分別為盒維數(shù)D0信息維數(shù)D1和關(guān)聯(lián)維數(shù)D2。對于指數(shù)p≥q,存在Dp≥Dq的關(guān)系。
1.2 廣義分形維數(shù)的計算方法
目前,對于離散信號廣義分形維數(shù)的計算方法主要有3種:覆蓋法、固定半徑法和固定質(zhì)量法[12],其中覆蓋法是研究分形最普遍的方法,其計算過程如下。
1) 信號離散。設(shè)實測振動信號采樣頻率為f,采樣時間為T,振動幅值為X,則采樣點數(shù)n=T/f,將信號進(jìn)行離散可得Tk,Xk,k=1,2,…,n。為便于計算其廣義分形維數(shù),將離散后的信號進(jìn)行移位,使所有的點落入直角坐標(biāo)系的第1象限。
2) 網(wǎng)格劃分。取εj=2jΔt為網(wǎng)格寬度,其中:Δt=1/f;j為網(wǎng)格尺度劃分種數(shù),則橫向網(wǎng)格數(shù)為
m=(maxX-min(X))/εj
(6)
縱向網(wǎng)格數(shù)n=T/εj。離散點Xk落在網(wǎng)格中的坐標(biāo)為M,N。其中
M=Xk/εj+1
(7)
N=Tk/εj+1
(8)
落入mn網(wǎng)格點數(shù)為dmn,網(wǎng)格mn覆蓋住集合的概率Pmnεj=dmn/n。通過改變ε的大小可以計算出一系列的Kqε,令Xj=Kqεj,Yj=lgεj。
3) 計算Dq。由以上幾步的計算,在lgε-Kqε的圖上得到標(biāo)度率存在的范圍,該范圍內(nèi)的斜率的絕對值就是給定參數(shù)q的Dq。對于無標(biāo)度區(qū)的選擇方法有很多,筆者直接采用最小二乘擬合的方法求解斜率。
設(shè)Yj=-DqXj+B,Dq為所求的斜率,則
(9)
需要特別注意的是,采用求斜率的辦法計算GFD時野點對其計算結(jié)果影響較大,在實際計算時要剔除野點。
2 核函數(shù)主元分析
核空間理論是針對測量空間中非線性問題或者線性不可分問題,通過尋找合適的非線性映射函數(shù)ΦX,將測量空間中的樣本集X映射到高維空間F中,使得線性不可分的問題在空間F中進(jìn)行分類。最早由Bernhard提出[13],目前在機(jī)械領(lǐng)域已有成熟的運(yùn)用[14-16]。KPCA具體算法[17]如下。
非線性映射函數(shù)Φ:Rm→F,將輸入空間xkk=1,2,…,n映射到特征空間F:Φxk,k=1,2,…,n中。設(shè)F:Φ(xk)(k=1,2,…,n)已經(jīng)去均值,則在F空間上的協(xié)方差矩陣為
(10)
對矩陣CF做特征矢量分析。設(shè)其特征值為λ,特征矢量為V,λV=CFV,將每個樣本與該式做內(nèi)積,可得
λΦxk,V=Φxk,CFV(k=1,2,…,n)
(11)
則特征矢量V可用Φ(xk)線性表示為
(12)
其中:αj為相關(guān)系數(shù)。
聯(lián)立式(10)~(12)可得
(13)
定義一個n×n的方陣K
Kij=Φxi,Φxj
(14)
則式(13)可簡化為nλKα=K2α,由此可以看出,在特征空間F中做線性主元分析就相當(dāng)于求解式(14)的特征值和特征向量。矩陣K的特征值λ1≥λ2≥…≥λn,其對應(yīng)的特征向量為α1,α2,…,αn。為了達(dá)到降維的目的,可以選擇保留前pp≤n個特征值和特征向量。矩陣K可通過選擇核函數(shù)來確定。
為提取主元特征,需計算映射數(shù)據(jù)在特征空間F中的投影
(15)
目前,常用的核函數(shù)有高斯徑向基核函數(shù)、多項式核函數(shù)及神經(jīng)網(wǎng)絡(luò)核函數(shù)等。主元數(shù)目可通過主元貢獻(xiàn)率的方法進(jìn)行確定,其定義為
(16)
其中:Contrλk為第k個主元的貢獻(xiàn)率,表明第k個主元所包含的系統(tǒng)信息占全部信息的百分比。
為保證既最大化保留原有信息量的同時又實現(xiàn)特征空間的降維,要求p各主元的累計貢獻(xiàn)率CPV必須大于某一界限值,即
(17)
其中:CL為設(shè)定的界限值,通常取為85%。
3 GFD-KPCA機(jī)械故障特征提取
通過GFD-KPCA方法對旋轉(zhuǎn)機(jī)械進(jìn)行特征提取具體流程如圖1所示。
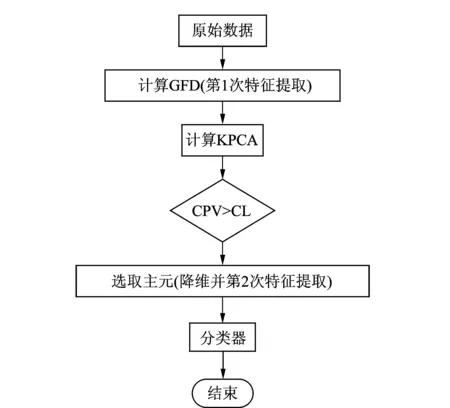
圖1 GFD-KPCA方法流程圖Fig.1 Flow chart of the GFD-KPCA method
為驗證方法的有效性,通過轉(zhuǎn)子實驗平臺測試數(shù)據(jù)、美國凱斯西儲大學(xué)(case western reserve university,簡稱CWRU)提供的典型軸承故障數(shù)據(jù)進(jìn)行驗證。
3.1 轉(zhuǎn)子振動GFD特征提取
轉(zhuǎn)子振動測量與診斷系統(tǒng)由轉(zhuǎn)子系統(tǒng)、控制采集系統(tǒng)和分析系統(tǒng)組成,如圖2所示。
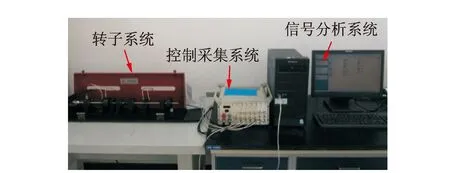
圖2 轉(zhuǎn)子實驗臺及其測試系統(tǒng)Fig.2 Rotor test rig and the test system

圖3 轉(zhuǎn)子試驗器結(jié)構(gòu)Fig.3 Sketch of the rotor dynamics test rig
如圖3所示,轉(zhuǎn)子支撐結(jié)構(gòu)由電機(jī)、軸承、軸系及集中質(zhì)量等核心件組成,可模擬偏心、碰磨及不對中等故障。測量傳感器采用非接觸式電渦流位移傳感器測量軸的徑向位移,采用光電傳感器測量轉(zhuǎn)速、提供鍵相信號。分別取未加故障的轉(zhuǎn)子運(yùn)行狀態(tài)為正常狀態(tài)(樣本1),圓盤加偏心質(zhì)量(樣本2),軸周向輕微碰摩狀態(tài)(樣本3),轉(zhuǎn)子偏心加不對中的狀態(tài)(樣本4),轉(zhuǎn)速為4 kr/min,采樣頻率為5 kHz進(jìn)行隨機(jī)采樣,每種狀態(tài)選取64組數(shù)據(jù),以32組數(shù)據(jù)作為KPCA算法的訓(xùn)練樣本,剩余的32組數(shù)據(jù)作為測試樣本。
通過對上述4種狀態(tài)的數(shù)據(jù)進(jìn)行廣義分形維數(shù)的計算,每種狀態(tài)采取穩(wěn)定的1 024個點,指數(shù)q范圍為[0,2.2],步長為0.05,每種狀態(tài)獲得45個分形維數(shù),以其中一組數(shù)據(jù)為例,結(jié)果如圖4所示。由圖4可知,良好狀態(tài)下廣義分形維數(shù)數(shù)值最小,偏心不對中耦合故障數(shù)值最大,這是由于良好狀態(tài)下信號最“規(guī)則”,耦合故障狀態(tài)下信號最“不規(guī)則”,說明廣義分形維數(shù)對系統(tǒng)不同狀態(tài)下的振動信號的復(fù)雜程度有著精確的刻畫,同時由廣義分形維數(shù)提取的特征對四種故障狀態(tài)有較好的區(qū)分度。

圖4 轉(zhuǎn)子廣義分形維數(shù)圖譜Fig.4 The GFD of rotor system
3.2 軸承典型振動故障GFD特征提取
CWRU為研究機(jī)械系統(tǒng)狀態(tài)評估、故障診斷等技術(shù)進(jìn)行了軸承故障模擬實驗,分別在軸承外圈、內(nèi)圈和滾珠上添加了直徑為0.177 8~1.016 mm的故障,通過加速度傳感器獲得振動信號[18]。選取1 797 r/min、故障直徑為0.177 8 mm狀態(tài)下的內(nèi)圈、滾珠、外圈故障進(jìn)行GFD-KPCA特征提取。每種故障選取8組數(shù)據(jù),共24組數(shù)據(jù)。以其中一組數(shù)據(jù)為例,其GFD結(jié)果如圖5所示。圖5可知,GFD對軸承不同故障狀態(tài)具有較好的區(qū)分度。
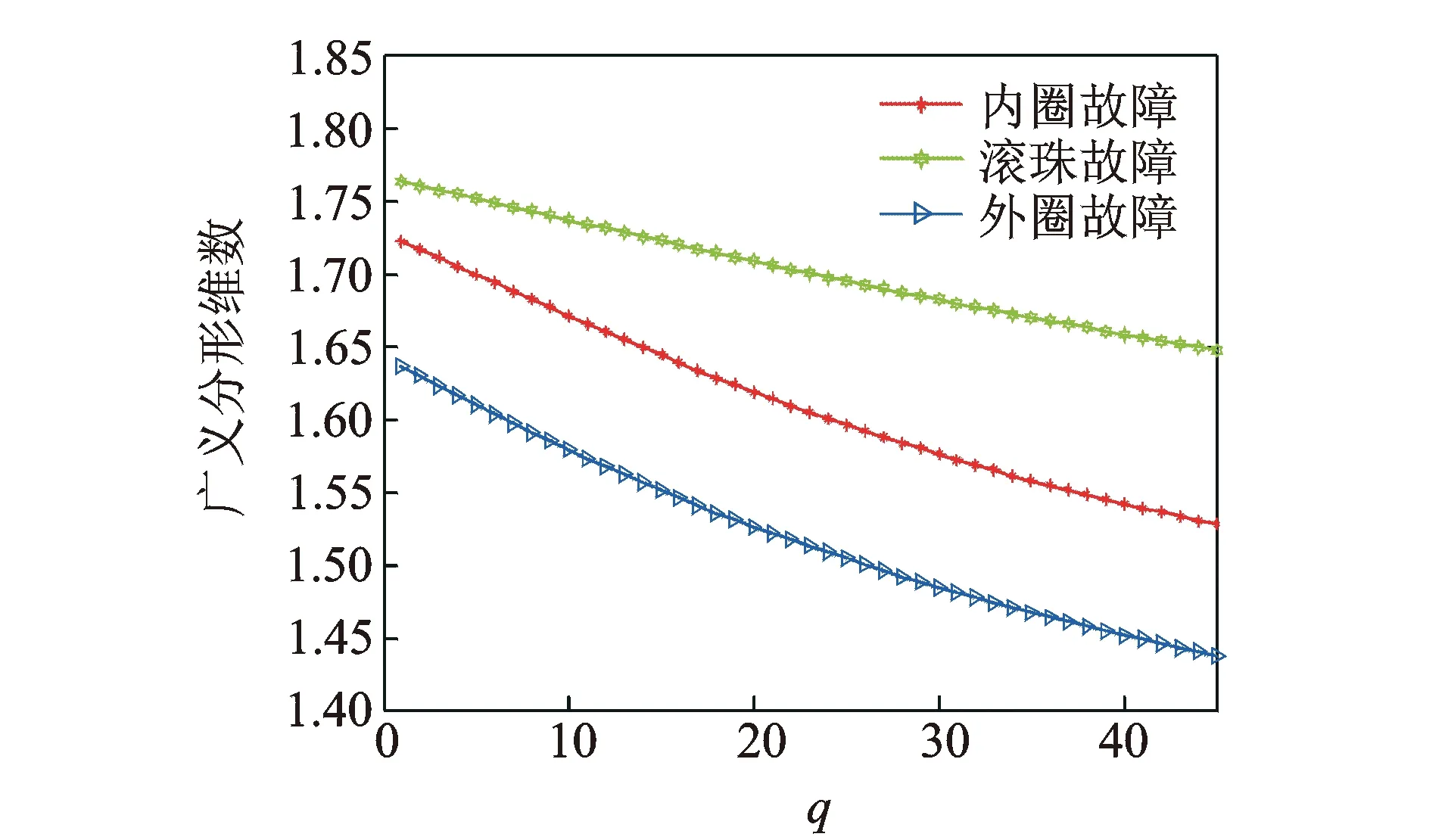
圖5 軸承廣義分形維數(shù)圖譜Fig.5 The GFD of bearing system
3.3 KPCA二次特征提取
通過廣義分形維數(shù)對轉(zhuǎn)子與軸承不同狀態(tài)進(jìn)行初步特征提取,獲得45維的高維特征空間。高維特種空間中,特征之間存在一定的冗余,需對特征進(jìn)行降維。有研究表明[12],支持向量本身對不同的方法具有不敏感性,即選用不同的核函數(shù)得到的分類結(jié)果較為接近,因此筆者選取高斯徑向基核函數(shù)(式18)對原始狀態(tài)征兆集進(jìn)行核函數(shù)主元分析,實現(xiàn)高維特征空間的降維與故障分類。
(18)
KPCA算法求得轉(zhuǎn)子系統(tǒng)和軸承系統(tǒng)主元累計貢獻(xiàn)率如表1所示。從表1可知,前3個主元已經(jīng)包含了系統(tǒng)的全部信息,因此保留前3個主元作為系統(tǒng)的特征值,即特征空間由45維降低為3維空間。

表1 主元貢獻(xiàn)率
4 特征提取方法有效性驗證
特征提取的目的是從眾多特征中求出對分類識別最有效的特征,從而實現(xiàn)特征空間的壓縮,并使不同狀態(tài)數(shù)據(jù)類內(nèi)距離最小、類間距離最大。KPCA算法在特征提取的同時具有分類器的功能,將用于測試的32個轉(zhuǎn)子故障樣本輸入訓(xùn)練好的KPCA模型,其分類結(jié)果如圖6所示。由圖6可知,轉(zhuǎn)子系統(tǒng)4種狀態(tài)下的數(shù)據(jù)各自形成聚類中心,并進(jìn)行了正確的分類。同樣,將用于測試的軸承24個故障樣本輸入訓(xùn)練好的KPCA模型,其分類結(jié)果如圖7所示。由圖7可知,軸承在3種故障狀態(tài)下的數(shù)據(jù)各自形成聚類中心,并進(jìn)行了正確的分類。

圖6 轉(zhuǎn)子KPCA分類結(jié)果Fig.6 Classification of rotor system using KPCA method

圖7 軸承KPCA分類結(jié)果Fig.7 Classification of bearing system using KPCA method
為進(jìn)一步驗證分類的有效性,選取最常用的K近鄰(K nearest neighbor,簡稱KNN)算法作為分類器,主要是因為與其他具有較強(qiáng)學(xué)習(xí)能力的分類器相比,KNN的分類結(jié)果更依賴于數(shù)據(jù)特征而非分類器本身。同時,GFD-KPCA特征提取方法中,徑向基核函數(shù)中的參數(shù)σ對特征提取和分類結(jié)果影響較大,嚴(yán)重制約了KPCA的工程應(yīng)用。為研究GFD-KPCA特征提取方法的適用性,對不同σ取值情況下的KNN算法分類情況進(jìn)行研究,結(jié)果如圖7所示。KNN算法分類正確率結(jié)果隨σ取值的增大而增大,當(dāng)σ≥2時,分類正確率達(dá)穩(wěn)定值,轉(zhuǎn)子故障確分率達(dá)到96.88%,即錯分1個數(shù)據(jù),軸承故障確分率達(dá)到91.67%,即錯分2個數(shù)據(jù)。說明GFD-KPCA特征提取方法對于σ取值有較寬的適用性和較高的分類識別率,從而驗證了方法特征提取的有效性。

圖8 σ與KNN算法確分率的關(guān)系Fig.8 The relationship between σand classification accuracy in KNN
5 特征提取方法穩(wěn)健性驗證
KPCA算法的分類精度嚴(yán)重依賴于初始特征的區(qū)分度,為了說明算法的適用性和穩(wěn)健性,筆者利用通過美國智能維數(shù)系統(tǒng)中心(intelligent maintenance systems,簡稱IMS)的軸承疲勞試驗數(shù)據(jù)對GFD-KPCA的早期微弱故障特征提取能力進(jìn)一步研究。
軸承早期故障具有特征不明顯、信號微弱、信噪比低及故障識別難等特點,是軸承狀態(tài)監(jiān)控的難點和熱點問題。IMS進(jìn)行了軸承疲勞試驗,實驗裝置可參考文獻(xiàn)[19-20]。一個軸上安裝了4套RexnordZA-2115雙列滾子軸承。軸的轉(zhuǎn)速保持2 kr/min恒定不變,通過彈簧裝置在軸上加載2 721.554 kg的徑向載荷。所有軸承潤滑固定,并且每個軸承座都安裝2個PCB加速度傳感器用來采集軸承的振動數(shù)據(jù)。振動信號每隔10 min采集一次,采樣長度為20 480個點,采樣頻率為20 kHz。試驗臺中的4套軸承從2月12日11:16:18運(yùn)行至2月19日06:22:39,一共采集到984個文件數(shù)據(jù)。在疲勞實驗結(jié)束時,軸承1檢測到外圈故障。文獻(xiàn)[21]檢測到早期故障是在第541個文件,對應(yīng)試驗時間為2月16日04:42:39。疲勞實驗數(shù)據(jù)及早期故障點如圖9所示。由圖9可知,系統(tǒng)在產(chǎn)生早期微弱故障時其振動信號結(jié)構(gòu)相對于正常狀態(tài)并未產(chǎn)生明顯的突變。

圖9 IMS軸承疲勞試驗Fig.9 Bearing fatigue test in IMS
選取正常階段和早期磨損階段各100個文件,每個文件中選取3 000個數(shù)據(jù)點進(jìn)行GFD計算。以第1個文件和541個文件數(shù)據(jù)為例,其GFD結(jié)果如圖10所示。每種狀態(tài)選取50組數(shù)據(jù)作為訓(xùn)練和測試樣本,GFD-KPCA特征提取及分類如圖11所示。
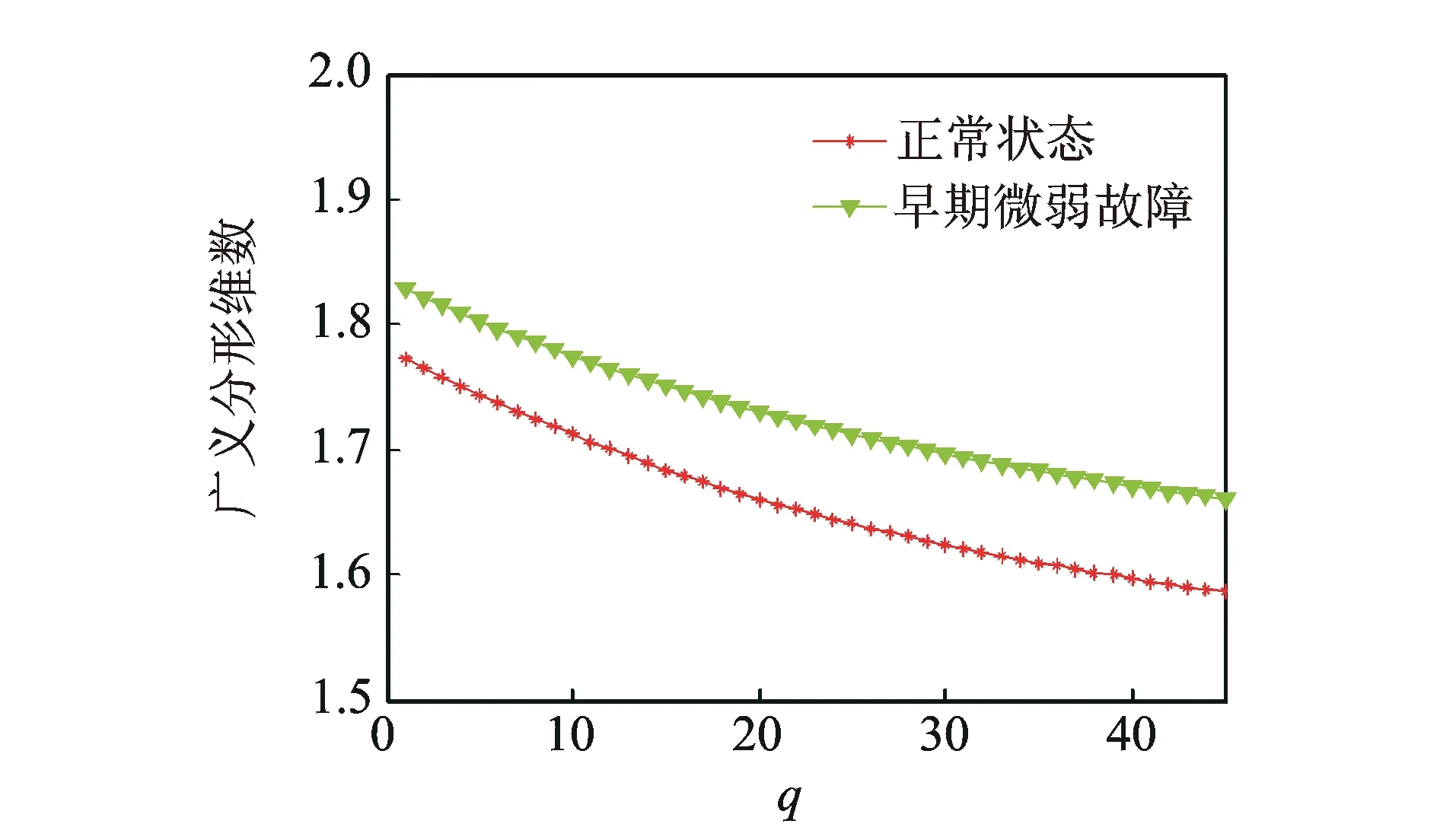
圖10 軸承早期微弱故障廣義分形維數(shù)Fig.10 GFD of bearing early weak fault
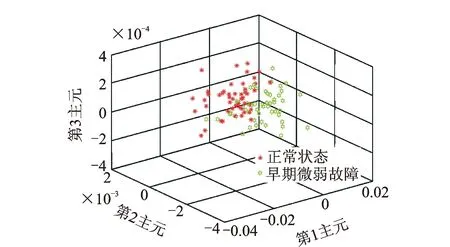
圖11 IMS軸承GFD-KPCA特征提取結(jié)果Fig.11 Bearing feature extraction using GFD-KPCA method
由圖10可知,當(dāng)軸承產(chǎn)生輕微早期磨損故障時,其內(nèi)在的動力學(xué)結(jié)構(gòu)已經(jīng)發(fā)生改變,GFD可以敏銳捕捉這種細(xì)微變化,對兩種動力學(xué)結(jié)構(gòu)有著良好的區(qū)分。圖11的KPCA分類結(jié)果顯示正常狀態(tài)和早期微弱故障狀態(tài)形成了良好的分類。當(dāng)σ≥2時,KNN算法的確分率穩(wěn)定在89%,即錯分11個數(shù)據(jù)。
相比轉(zhuǎn)子實驗和CWRU的典型故障數(shù)據(jù),IMS軸承早期故障特征和正常狀態(tài)并未有明顯的區(qū)分,且選取樣本的是一段時間的動態(tài)數(shù)據(jù),GFD-KPCA依舊獲得較好的分類精度,說明GFD-KPCA方法對于機(jī)械振動特征提取具有良好的適應(yīng)性和穩(wěn)定性。

圖12 IMS軸承常規(guī)KPCA特征提取結(jié)果Fig.12 Bearing feature extraction using normal KPCA method
為了進(jìn)一步說明GFD-KPCA的優(yōu)越性,與常規(guī)KPCA特征提取方法進(jìn)行對比驗證。選取最大峰值、絕對均值、均方根幅值、方差、偏斜度、峭度、波形指標(biāo)、脈沖指標(biāo)及裕度指標(biāo)作為初步特征提取的參數(shù)[14]。同樣對IMS數(shù)據(jù)進(jìn)行KPCA特征提取,結(jié)果如圖12所示。圖中顯示KPCA對數(shù)據(jù)進(jìn)行了一定的分類,KNN算法顯示常規(guī)KPCA對IMS數(shù)據(jù)最高分類精度為80%,即錯分20個點。
與常規(guī)KPCA算法相比,GFD-KPCA算法對動力學(xué)結(jié)構(gòu)有個更為精細(xì)地刻畫,不同狀態(tài)下振動提取的特征更為準(zhǔn)確。無論是對于典型故障還是微弱故障都有較好的提取能力,適用性和穩(wěn)健性更好。
6 結(jié) 論
1) GFD算法對振動信號的動力學(xué)結(jié)構(gòu)有精確的刻畫,對不同運(yùn)行狀態(tài)(包括故障狀態(tài))具有良好的區(qū)分度,優(yōu)于常規(guī)的振動特征提取方法,與KPCA結(jié)合可明顯提高旋轉(zhuǎn)機(jī)械的特征提取精度。
2) 對IMS軸承微弱故障特征提取說明GFD-KPCA相比常規(guī)的KPCA特征提取方法具有更好的適用性和穩(wěn)健性,彌補(bǔ)了常規(guī)KPCA算法由于初始特征區(qū)分度差導(dǎo)致分類精度差的不足。
3) GFD-KPCA 算法對核函數(shù)可變參量依賴性較小,適用范圍寬,在σ≥2情況下,只依賴距離測度的KNN算法即可滿足較高的確分率,具有良好的工程應(yīng)用價值。
4) GFD-KPCA方法也存在一定的不足,若不同故障之間區(qū)別度較大,只需少量數(shù)據(jù)進(jìn)行GFD-KPCA計算即可實現(xiàn)故障的特征提取。當(dāng)特征區(qū)分度不明顯時則需較大的數(shù)據(jù)量,導(dǎo)致了計算效率的不足。
猜你喜歡
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫(yī)學(xué)工程學(xué)報(2017年6期)2017-02-10 05:11:45
噪聲與振動控制(2015年4期)2015-01-01 07:08:21