非球面磁性復合流體拋光路徑誤差分析與仿真
2019-02-21 09:32:28錢大兵姜晨姚磊彭濤張勇斌
光學儀器 2019年5期
錢大兵 姜晨 姚磊 彭濤 張勇斌
摘要:針對光學系統中對非球面元件的精度要求,設計了直線光柵式的拋光軌跡,并用磁性復合流體以這一拋光軌跡拋光非球面。根據拋光軌跡和非球面方程計算出每個拋光點的坐標;根據拋光點坐標和拋光頭的拋光姿態計算出對應的拋光頭中心點的坐標;建立相鄰兩拋光點的弓高誤差模型,仿真出弓高誤差模型并分析弓高誤差的變化規律;根據弓高誤差變化規律,用等弓高誤差變步長控制算法實現弓高誤差的一致性,提高加工質量。
關鍵詞:磁性復合流體;非球面;等弓高誤差;路徑規劃
中圖分類號:TH161 文獻標志碼:A
引言
隨著科學技術的快速發展,光學儀器的制造水平也越來越高,對光學元件的要求也不斷提升。非球面具有成像質量好、質量輕、光能損失少、精度高、體積小等優點,廣泛應用于變焦鏡頭、天文望遠鏡等之中。隨著對非球面元件需求的增大,非球面元件的加工技術也逐步趨于完善。目前常用的加工技術有計算機控制表面成形、磁流變拋光、離子束加工、精密成型等,其中拋光作為非球面加工的最后一項關鍵技術,近年來也經歷了快速的發展。
磁場輔助拋光作為一種新型的加工技術近年來受到美國、日本等發達國家的高度重視,并且廣泛應用于光學元件、半導體等有較高表面精度的零件的加工中。日本的TAIA等研發了磁流體(MF)拋光技術,將松散的磨粒混合到磁流體中,通過磁場控制磨粒在磁流體中的機械運動和拋光,磨料顆粒的分散性較好,但粘度較低,從而使磨料顆粒的滯留量較小。美國Roch大學光學研究中心的Prokhorov等研發了磁流變加工技術,磁流變液(magnetorheololgical fluid,MRF)是通過均勻混合煤油、磨料粒子、純鐵粉得到的,通過其在磁場中的磁流變性進行光整加工,MRF粘度比較高、加工效率高,但是磨料的分布不是很均勻。日本的Shimada等提出了一種新型的磁性復合流體拋光液(MCF),MCF是MF和MRF的混合物,它結合了兩者的優點,它的粘度和顆粒分布的穩定性都比較高,在磁場作用下產生較大的磁力,具有良好的拋光性能。
目前我國也開展了相關的研究:張健等提出了小磨頭自適應拋光的方法,對銑削后中頻誤差較大的非球面進行預拋光,抑制中頻誤差;潘日等基于大口徑軸對稱光學非球面,設計制造了一套氣囊拋光系統,并對其結構進行了仿真分析;王宏一研究了阿基米德螺旋線的線間距變化規律和重疊率規律,提出了一種等重疊率的螺旋線軌跡規劃方法。由于現有的研究不涉及非球面的MCF拋光,本文采用線性光柵軌跡規劃方法對弓高誤差進行仿真分析,采用等弓高誤差的變步長控制算法,通過仿真模擬分析了弓高誤差和步長之間的規律,實現了弓高誤差的可控性,為磁性復合流體拋光非球面的精度控制提供參考。
1拋光路徑規劃
1.1加工路徑規劃
在傳統加工中:常用的規劃方法有直線光柵式、螺旋線式、Hilbert曲線等;常用的行距確定方法有參數線法、截平面法、等殘留高度法;常用的步長確定方法有等參數步長法、等弦長步長法、等弓高步長法,但這些方法主要應用于銑削和磨削加工中。
拋光加工是拋光頭沿著設定好的拋光軌跡進行駐留拋光的過程。對不同的拋光軌跡,有不同的拋光方法,即使是同一種拋光軌跡拋光不同的工件,拋光的效果也不同,因此選擇合適的拋光軌跡顯得尤為重要。目前常用的拋光軌跡是直線光柵式和螺旋線式拋光軌跡,因為螺旋線式拋光軌跡在平面上投影的線距變化較大,導致軌跡間去除區域的接觸面積變化較大,拋光效果不好,本文采用直線光柵式軌跡對非球面拋光進行研究。
1.2路徑規劃算法
主要有以下4步:
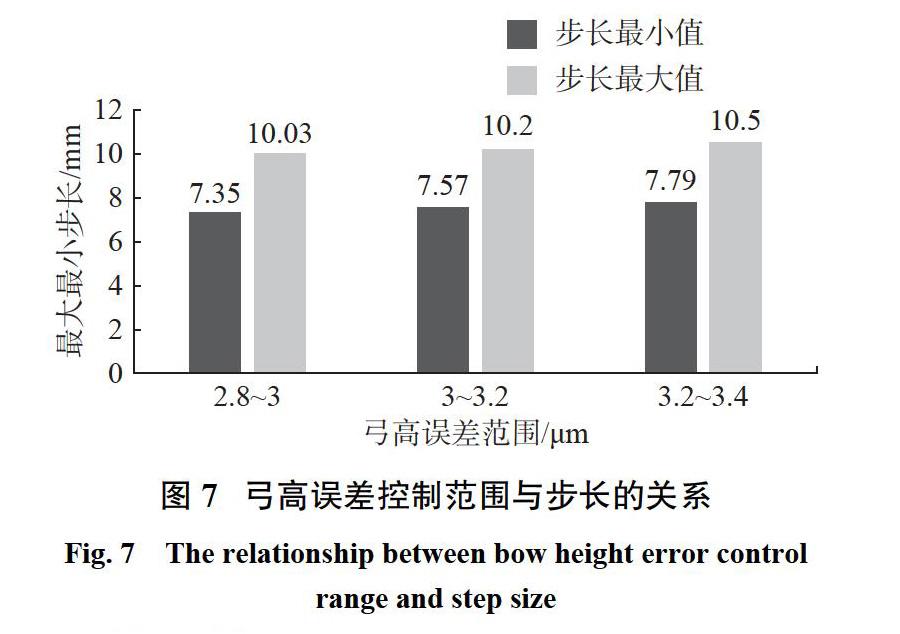
(1)建立非球面數學模型,非球面的方程可以表示為
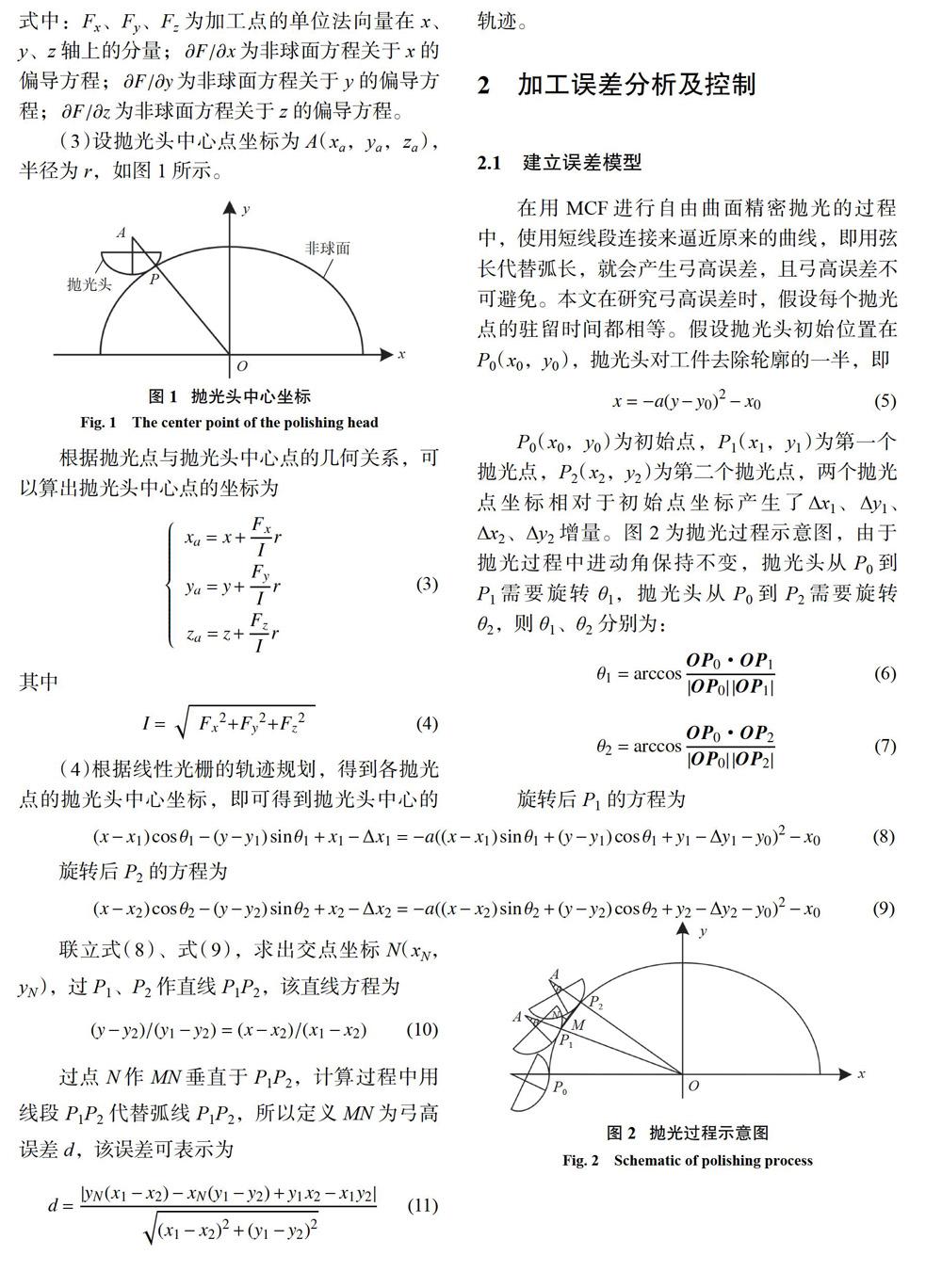
2.2誤差分析
根據上述建立好的MCF拋光誤差模型,通過MATLAB仿真拋光軌跡、拋光頭中心點軌跡和弓高誤差。在仿真過程中設拋光頭的圓弧半徑為50mm,非球面方程的參數如表1所示。
根據直線光柵式的加工軌跡和拋光頭中心點的計算方法,可以仿真出拋光軌跡和拋光頭中心軌跡,如圖3所示。
圖4(a)所示,根據直線光柵式的拋光軌跡,當步長變大其y-z平面內的弓高誤差也變大,當步長變小其y-z平面內的弓高誤差也變小。MATLAB仿真結果表明:當y的值從-180到0時,弓高誤差d先減小后增大,當y的值從0到180時,弓高誤差先減小再增大;在同一時刻,x軸方向上的后一條軌跡的弓高誤差的減小趨勢比前一條減小的趨勢更大;如圖4(b)所示,在y等于0附近時,誤差達到最高,在y等于120和-120附近時,誤差達到最小值。
2.3等弓高誤差變步長控制算法
復雜曲面常用的計算步長方法有等參數法、等截面法、等弓高誤差法,為了獲得滿足弓高誤差的最大步長,本文采用等弓高誤差法來計算步長。先對弓高誤差的模型進行簡化,簡化后的模型如圖5所示。
根據簡化后的誤差模型來計算步長,步長可表示為
式中:L相鄰兩拋光點之間的距離;R為非球面的局部曲率半徑;h為設定的弓高誤差;r為拋光頭半徑。
由于此誤差模型是簡化后的誤差模型,用此誤差模型計算出的步長所對應的弓高誤差不一定在弓高誤差的控制范圍之內。當計算出的步長所對應的弓高誤差不在弓高誤差的控制范圍之內時,需要用步長搜索法來確定滿足弓高誤差的最大步長。步長搜索法的原理是,當誤差需要控制在ε1≤d≤ε2(ε1為弓高誤差下限、ε2為弓高誤差上限)時,如果弓高誤差小于ε1需要增大步長,直到誤差在想要控制的范圍之內,如果誤差大于ε2,需要減小步長,直到誤差在控制的范圍之內。等弓高誤差變步長控制算法的具體實現方法如下。
(1)初始化y1、z1。
(2)根據初始y1、z1用式(12)計算出步長L。
(3)根據計算出的步長確定出y2、z2。
(4)根據式(11)求出弓高誤差d。
(5)如果ε1≤d≤ε2,令y1=y2,Z1=Z2,然后轉第2步。如果d不在弓高誤差的控制范圍之內:當d<ε1時,確定增大搜索步長hi,在原y2的基礎上增大搜索步長hi,計算出對應弓高誤差,直到弓高誤差在想要控制的范圍之內;當d>ε2時,確定減小步長hd,在原y2的基礎上減小搜索步長hd計算出對應的弓高誤差,直到弓高誤差在想要控制的范圍之內,令y1=Y2,Z1=Z2,然后轉第2步。
用等弓高誤差變步長控制算法對非球面的弓高誤差進行控制,所用的控制參數如表2所示。
圖6為用等弓高誤差變步長控制算法得到的結果,在弓高誤差偏高區域,步長偏密集,在弓高誤差偏低區域,步長偏稀疏。當誤差控制范圍在[2.8,3.0]時,需要39個拋光點,當誤差控制在[3.0,3.2]時,需要38個拋光點,當誤差控制范圍在[3.2,3.4]時,需要37個拋光點,由此可知,誤差控制的范圍越接近原始誤差時,拋光點的數量越少,誤差控制范圍下降,拋光點數增加。
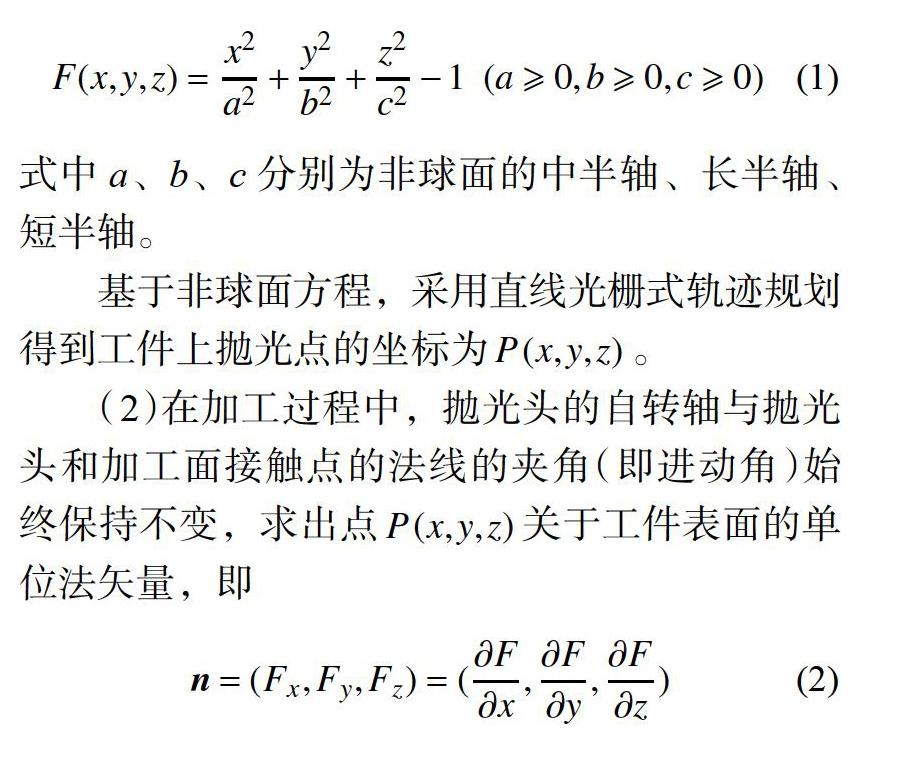
圖7是弓高誤差的控制范圍與最大和最小步長的關系,當弓高誤差的控制范圍為【2.8,3.0】、【3.0,3.2】、【3.2,3.4】時最大步長分別為10.03、10.20、10.50,最小步長分別為7.35、7.57、7.79。由此不難看出,弓高誤差控制范圍上升,最大步長和最小步長都在增大,弓高誤差控制范圍下降,最大步長和最小步長都在減小。用此控制算法可以把弓高誤差控制在需要的范圍之內,可以獲得滿足弓高誤差的最大步長,提高了加工精度和加工效率。
3結論
(1)對非球面采用直線光柵式的加工軌跡進行表面加工,針對MCF拋光的特性,設計軌跡規劃算法并且建立誤差模型,仿真出非球面的弓高誤差分布,對非球面的弓高誤差分布進行分析。
(2)根據仿真結果可知:當弓高誤差控制范圍上升,最大步長和最小步長都在增大,拋光點數量在減少,當弓高誤差控制范圍下降,最大步長和最小步長都在減小,拋光點數量在增多。
(3)這一運動控制算法可以在CNC拋光設備上得以應用,只需把算法生成的數據導入CNC拋光臺,拋光設備按算法生成的數據點進行拋光,就可以實現弓高誤差的一致性。