基于STATCOM的DFIG風電機組低電壓穿越策略研究
2019-02-14 08:51:20吳彥廷
電子制作 2019年2期
吳彥廷
(浙江省杭州學軍中學紫金港校區,浙江杭州,310000)
0 引言
我國在風電裝機容量方面取得重大突破,隨著八大千萬千瓦級風電基地的規劃和建成,中國已成為風電裝機容量最大的國家。預計到 2020 年,我國風電裝機容量將達到2. 0 億 kW[1]。但由于LVRT(低電壓穿越)能力方面的欠缺,大規模風電接入所連接電網的安全運行仍存在重大隱患。
2011 年以來,河北、甘肅、吉林等風電基地相繼發生的多起大規模風電機群脫網事故足以佐證。為此,國家標準化管理委員會頒布了《風電場接入電力系統技術規定》求并網風電機組具備LVRT 能力[2]。并且要求風電場在正常運行條件下能夠調節公共接入點(即PCC點)的電壓以及無功功率,最大限度地縮小不穩定的風速對電壓的擾動影響,保證PCC點處電壓波動相對穩定。
為解決風電系統不斷增加的穿透功率,變化幅度較大的風速和多變的系統運行方式等造成擾動引起的電壓波動問題。通常在升壓站裝設動態無功補償設備,例如靜止無功補償器(SVC)和靜止同步補償器(STATCOM)等[3,4],用于DFIG雙饋風電機組等無功補償的能力。而STATCOM相對于SVC而言,具有大的工作范圍寬、易于穩定控制,且能夠快速響應的特點,然而其高昂的設備成本和維修費用,是目前受限于風電機群控制的主要原因。與SVC[5]相比,STATCOM最為明顯的優勢在于其無功補償的能力不受到外界電壓的影響,因此其具有很強的電壓支撐能力。除此以外,程啟明[6]采用了風電場多種工況下的電壓控制,從而維護風電場在受到外界風速波動情況下導致的電網母線PCC點的電壓和電流的穩定,從而為風電機組等有功和無功的有效控制提供一種更為直接的方式。
然而,由于低電壓穿越LVRT能力欠缺容易導致安全問題,國內外專家學者在LVRT控制策略和保護原理方面投入大量精力研究[7,8]。其中文獻考慮Crowbar阻值和退出時間的雙饋風電機組低電壓穿越推導了DEIF在并網運行情況下,發生機端三相短路后的最大轉子電流估算式。同時,胡家兵[9]分析并研究了 Crowbar電阻阻值,短路電流的最大值及出現最大值時間之間的關系 ,同時也研究了不同Crowbar 電阻阻值以及不同的退出時間對 DFIG 的 LVRT效果的影響。
文獻[10] 給出了一種DFIG風力發電系統無功極限值的計算方法,并討論了在強電網無功調節的方式中DFIG風電場的應用,并且給出了通過DFIG風電場就近對當地用戶直接進行無功補償的方式,同時也給出了與之對應的無功分配策略,文獻 [11] 配置 STATCOM 的 DFIG 風電場在不對稱電網故障下的控制策略研究在不對稱電網故障穿越的第 2 階段,雙饋式(doubly-fed induction generator,DFIG)風電場如何實現“自身不脫網安全運行并同時滿足并網導則無功支撐要求”的問題。
同時本文也對分散的DFIG風電機組與 PCC電壓接入點之間的物理緊密程度進行了考慮和分析,通過建立DFIG風電場無功電壓多目標優化控制模型,并采用基于過濾集合的內點法進行求解,以此完成對不同風電機組之間、集中無功補償設備之間與風電機組的協調控制。
1 基于無功功率分析的DFIG低電壓穿越研究
■1.1 雙饋異步發電機無功功率的分析
在雙饋電機變速恒頻風力發電方案中,轉子通過由兩個反向連接的PWM變換器構成的“交流—直流—交流”變換器與電網間接相連,定子則是直接接入電網。其中靠近DFIG轉子一側PWM變換器的稱為轉子側變換器,靠近電網一側的則被稱為是網側變換器。工作中,在高功率因數整流模式下,網側變換器為轉子側變換器提供直流母線電壓。同時為了實現DFIG的變速恒頻運行,轉子側變換器將會對轉子的電流電壓進行控制。其中,DFIG變速恒頻風力發電系統功率關系如圖1所示。
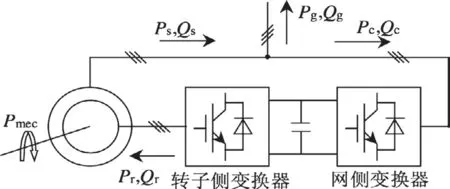
圖1 DFIG的變功率變換關系原理圖
圖中,Pmec表示輸入DFIG的機械功率;Ps表示定子發出的有功功率,Qs則表示定子發出的無功功率。Pc表示網側變換器從電網輸入的有功功率,Qc則表示電網輸入的無功功率;Pg、表示DFIG風電系統流入電網的有功功率,Qg表示其無功功率。
在理想狀況下,定、轉子繞組的損耗可以忽略不計,可得到以下關聯關系

由于定子側有功功率的轉差功率等于轉子側的有功功率,則可得以下公式

式中Pmec(風力機輸入的機械功率)的值受風力機的捕獲能力大小,風力機轉速控制規律影響。目前,為了使風力機輸入的機械功率盡可能大,現今的DFIG風能轉化率的提升通過對變速恒頻風電機組的轉速控制規律來完成
同樣的,在理想狀況下,我們忽略功率變換器的開關損耗和線路損耗,由能量守恒定律,我們可以得到:

由于轉子側的有功功率方向與轉差率的正負相關,可通過轉差率的符號來顯示DFIG的工作狀態,例如,正的轉差率表示DFIG的亞同步狀態,負的轉差率表示其正處于超同步狀態,而轉差率為零時,DFIG則處于同步運行狀態
假設系統損耗為零,那么DFIG輸入電網系統的有功功率和無功功率數值相等。即下式:

由DFIG的數值模型可以看出,DFIG轉子側和定子側的相關關系為:

式中:上式中:定子和轉子側電流的最大值分別為:Is、Ir;定子側、轉子側的漏感及勵磁電流分別為Ls 、Lr;定子側的電流角頻率為ω1;轉差角頻率為ω2。
由此可知,雙饋電機轉子端輸入的無功功率有兩個作用,一是提供給轉子繞組,二是按一定比例(轉差率) 向定子繞組傳遞一部分無功。
■1.2 DFIG 風電機組電壓穿越的控制策略
基于各國提出的風電場并網導則,我們可以將電網依據故障的時間分類,可以分為:初始階段、持續階段以及恢復階段。鑒于我國在第一階段的研究已比較成熟,第三階段的解決方法也相對容易。在此我們具體給出第二階段即故障持續階段對風電機組的控制策略。
關于在第二階段,我們首先需要考慮的的是防止風力發電機組脫網的問題。以及并網導則對于正序無功電流的要求。值得一提的是,雙饋風力發電機組由于自身變流量的問題,無法保證所有控制目標的精度,因此要考慮控制方法優先級的問題。相較于滿足并網導則對于無功支撐的要求,風電機組自身不脫網安全運行的控制優先級較高。在此,我們從轉子側變流器RSC方面考慮,給出RSC正負序電流指令算法。其實我們也可從網側變流器GSC方面考慮,在此不做過多說明。
對于RSC而言,消除DFIG轉矩脈動應設為第1優先級,在此基礎上分析,首先給出核心思想:我們在保證消除DFIG電磁轉矩脈動的前提下,盡可能在RSC電流上限值以內滿足并網導則對于正序無功電流的要求。
接著是對定子和轉子側的分析,定子側和轉子側的方向設定均以電動機的常用慣例為準,定子坐標系中矢量形式的DFIG 定、轉子電壓和磁鏈方程為
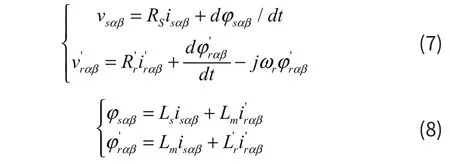
上式中:定子側、轉子側電阻分別為:RS,; 定子側轉子側的定子自感、互感、轉子互感分別為Lm,Ls,L′
r。定子側、轉子側的空間矢量分別為vsαβ,;定子側轉子側的電流空間矢量分別為;轉子電角速度為ωr;定、轉子磁鏈空間矢量分別為。其中上標 “ ’ ” 表示繞組折算到定子側后的物理量。
在不對稱的電網電壓下,DFIG各自電磁量的存在正序和負序,因此電流、電壓以及磁鏈空間的表達式分別為

式中:電壓、電流或磁鏈空間矢量為F ;上標正、負序分量分別為“p ,n”; 正、反轉同步旋轉坐標系下標分別為“dq + , dq - ”;同步電角速度為sω。
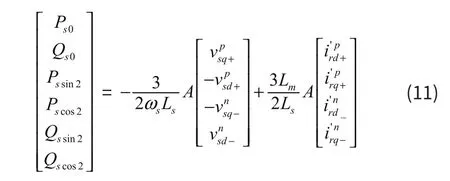
由于電網電壓的不對稱性,輸出至電網的DFIG 定子的瞬時有功、無功功率可以表示為
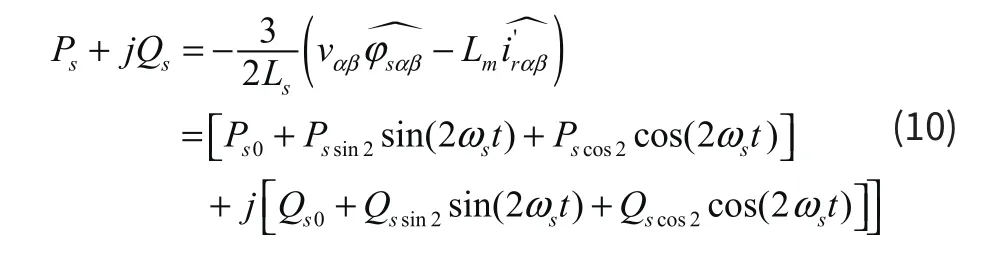
式中:
給出不對稱電網電壓條件下 DFIG 的電磁轉子表達示:
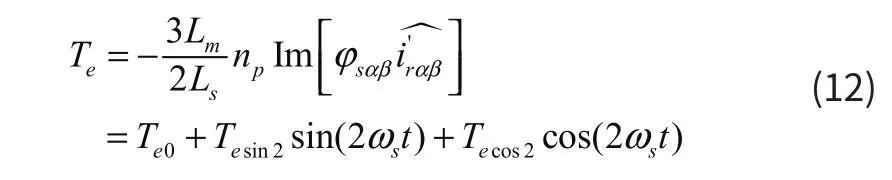
上式中np表示極對數。
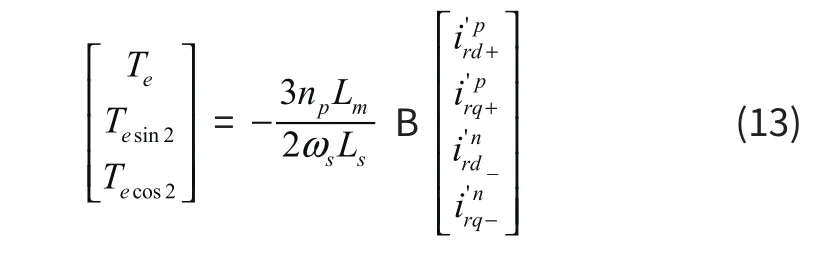
可見,若要最大限度地減小 DFIG 電磁轉矩的脈動帶來的擾動影響,需滿足 Tesin2= Tecos2= 0的條件。在此,我們使用正、負序定子電壓矢量定向的方式,由式 (12) 可知,對于 DFIG 轉子正序有功,無功電流與負序有功,無功電流的指令值之間需滿足下列關系式

可以通過結合式 (8) 和 (9) 來滿足“ SDLWindV ”對于正序無功電流輸出的要求, 因此將DFIG 的轉子正序無功電流指令值設為

我們需要控制轉子正負序電流的指令值在 RSC 的電流上限值以內,以防止 RSC 出現過流的情況,同時考慮到RSC 的電流限制條件為:

結合式 (13) - (15) , RSC 正負序電流指令值算法如圖 2所示。我們便以此為控制DFIG風電機組的控制策略。在滿足并網導則對于正序無功電流的要求的前提下,如有剩余的電流裕量,則用于產生式 (16) 中電磁轉矩的平均值Te0。
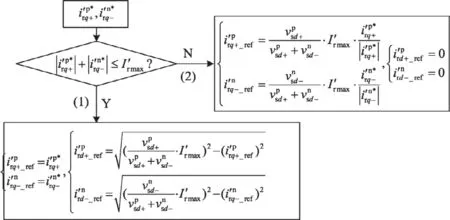
圖2 RCS電流指令算法流程圖
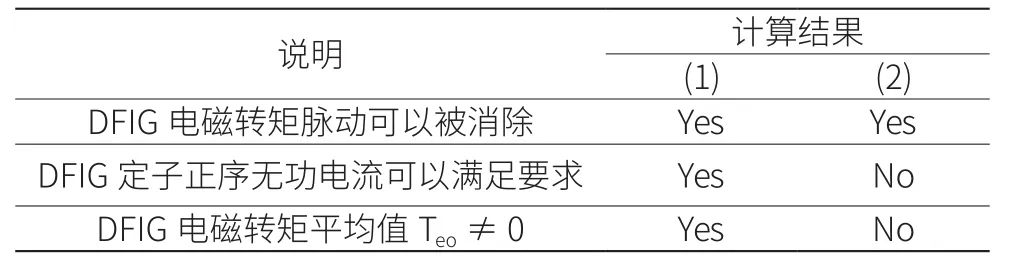
表1 RCS 電流指令值計算結果
2 總結與展望
LVRT(低電壓穿越)能力方面的欠缺給我國風電機領域發展帶來巨大困難。由于該原因,國風電機場曾發生多起安全事故。為解決上述原因帶來的問題,本文從PCC點入手,通過研究控制PCC點的電壓波動來解決低電壓穿越造成的問題。在進行雙饋異步發電機的無功功率分析后,我們從轉子側變流器RSC方面考慮,采用RSC正負序電流指令算法來控制,使得在保證消除 DFIG 電磁轉矩脈動的前提下,盡可能在 RSC 電流上限值以內滿足并網導則對于正序無功電流的要求,一次來解決該類問題。
在實際應用方面,本文仍有欠缺,文中只給出此法在風電機組的應用數據,即在單個風電機組中有效。但對于在風電機群的應用效果,由于無實際數據作為理論支撐,并不知道實際效果如何。希望將來的研究能夠向風電機群的電壓控制方向邁進,使得能源得到充分利用。
