基于紅外反射傳感器的三線擺周期測量裝置
2019-02-13 10:22:24石明吉秦佳瓊李豪博楊雪冰
物理實驗 2019年1期
石明吉,秦佳瓊,李豪博,洪 倩,楊雪冰
(南陽理工學院 電子與電氣工程學院,河南 南陽 473004)
獲取精確的汽車零部件總成慣性參量是進行汽車系統動力學分析及其隔振系統設計的重要基礎. 汽車零部件慣性參量由質量、質心位置、轉動慣量和慣性積組成,轉動慣量的識別尤為重要[1]. 質量分布均勻、形狀規則的零部件的轉動慣量可以計算得到,對質量分布不均勻和形狀不規則的零部件,只能實驗測量得到. 三線擺法是實驗測量轉動慣量的常見方法[2]. 運用三線擺測量轉動慣量時,需要動態測量的重要的參量是轉動周期. 測量轉動周期的傳統方法是采用人工計數和秒表進行測量,一般要測試3次,每次測量30~50個周期的總時間,然后取平均得到單個周期. 人工計數容易出錯,并且周期測量一旦出錯,后期無法糾正,只能重測[3]. 為了解決人工計數的弊端,利用光電傳感器、角速度傳感器、單片機、手機和數據采集系統等設計了多種三線擺周期測量裝置[4-6]. 這些測量裝置的共同特點是通過計數計時. 由于在實際實驗中,圓盤在水平面內逐漸發生輕微的橫擺,很容易導致計數漏記1次[1]. 此外,采用光電傳感器測量的弊端是儀器調整比較麻煩. 因此,有必要設計三線擺周期測量裝置,以確保周期測量準確性. 應用紅外反射傳感器可以將三線擺下盤的扭擺轉換成電壓信號的振蕩,然后利用數據采集系統獲得三線擺下盤轉動情況的時間歷程信號,通過數據分析可以準確得到三線擺的扭擺周期.
1 測量原理
紅外線反射傳感器利用紅外線反射的原理,根據反射的強度判斷前方有無障礙. TCRT5000是比較常用的紅外反射傳感器,傳感器的紅外二極管不斷發射紅外線,當發射出的紅外線沒有被反射回來或被反射回來但強度不夠大時,光敏三極管一直處于關斷狀態,此時傳感器輸出的是高電平;被檢測物體出現在檢測范圍內時,紅外線被反射回來且強度足夠大,光敏三極管飽和,此時傳感器輸出低電平[7].
如果將TCRT5000豎直朝下固定在三線擺下盤邊緣處擋光桿的上方,距離在檢查距離的范圍之內,當三線擺扭擺時,擋光桿與TCRT5000之間的距離發生周期性變化,反光情況也發生周期性變化,TCRT5000輸出的電壓也隨時間發生周期性變化. 由于三線擺扭擺時,1個周期內經過平衡位置2次,所以,TCRT5000的輸出電壓隨時間變化的周期是三線擺扭擺周期的一半. 利用數據采集系統采集TCRT5000輸出電壓隨時間的變化,經處理得到TCRT5000輸出電壓變化的周期,進而求出三線擺扭擺的周期.
2 實 驗
調整三線擺底座水平,調整懸線的長度使下盤水平. 測量上盤懸線孔間距a、下盤懸線孔間距b、上下盤之間的高度差H,讀出下盤的質量M,并記錄. 如圖1所示,利用鐵架臺將TCRT5000紅外反射傳感器固定在三線擺下盤邊緣處擋光桿的上方. 將紅外反射傳感器的輸出端與數據采集系統硬件電路的輸入通道相連,利用穩壓穩流電源給TCRT5000提供5 V電壓. 將數據采集系統輸出端經USB口與電腦相連. 電腦上安裝有上位機軟件. 打開界面,設置采集時間間隔為0.001 s,采集時間為15 s. 利用上盤帶動下盤做小角度扭擺,適當調整,令TCRT5000感應頭與擋光桿距離為5 mm. 當三線擺扭擺時,擋光桿周期性掃過紅外反射傳感器下方,擋光桿對紅外線的反射作用使TCRT5000傳感器輸出的電壓發生周期性變化. 啟動數據采集系統并將采集到的數據以Excel格式保存到電腦中.
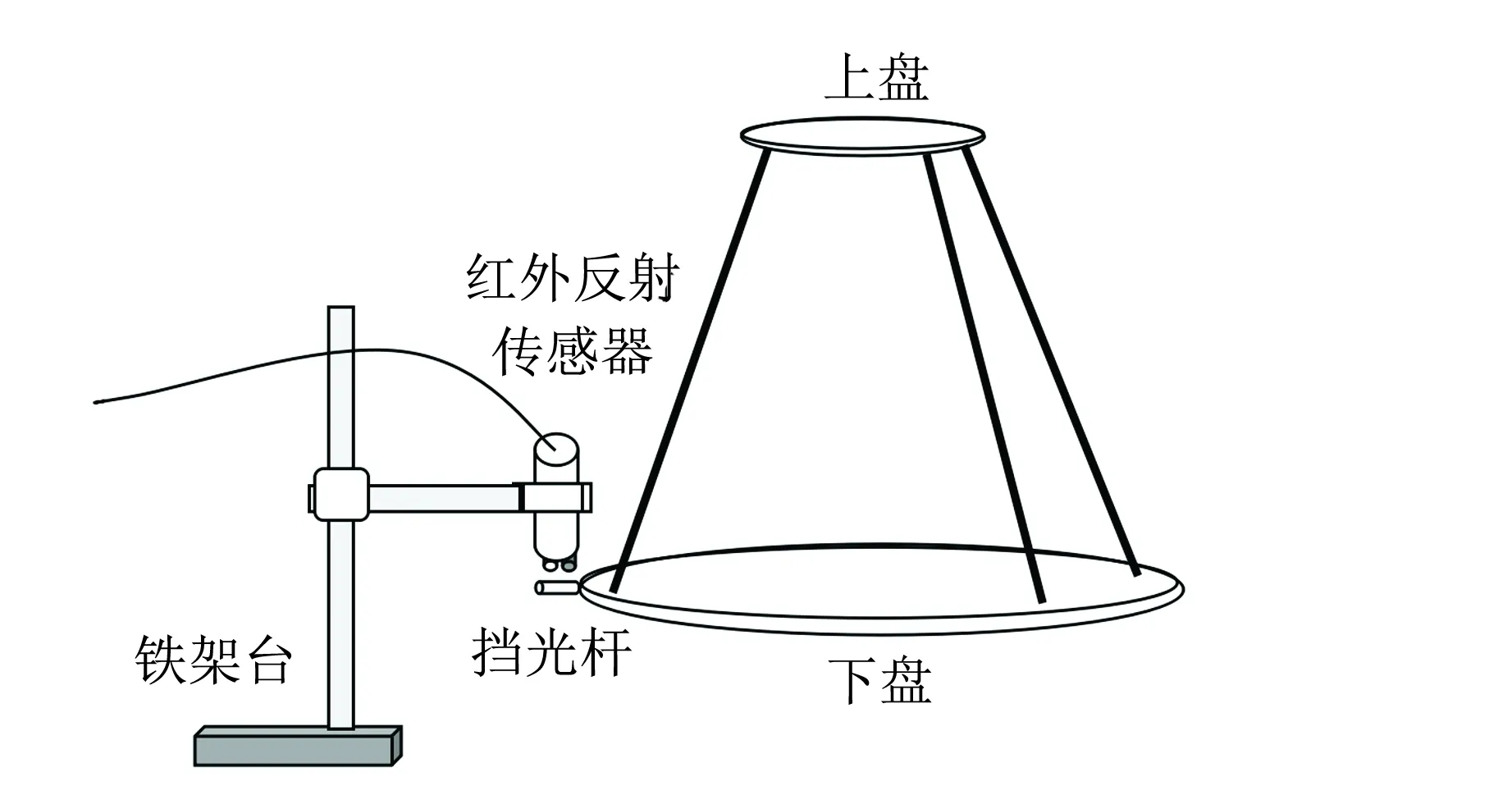
圖1 實驗裝置示意圖
為與現有儀器比較,相同條件下利用DH4601型轉動慣量測試儀進行測試,設置周期數為30. 調整光電門的位置,利用上盤帶動下盤作小幅扭擺,盡量避免橫擺或晃動,扭擺的轉角控制在5°以內. 按下DH4601型轉動慣量測試儀的執行鍵開始計時,計時結束后,記下DH4601顯示的30個周期的總時間.
3 實驗結果與討論

(1)
代入數據后,得出三線擺下盤的轉動慣量的理論值為J理論=4.803×10-3kg·m2.
3.1 DH4601型轉動慣量測試儀測量結果
DH4601型轉動慣量測試儀測量30個周期的總時間為40.39 s,得到三線擺扭擺周期為1.346 s. 根據三線擺轉動慣量的實驗公式[9]:
(2)
代入數據后,可以計算出三線擺下盤的轉動慣量J實=4.780×10-3kg·m2,與理論值相比,Er=0.48%.
3.2 基于紅外反射傳感器的三線擺周期測量裝置的測量結果
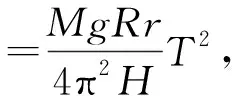
將基于紅外反射傳感器的三線擺周期測量裝置生成的的Excel數據用Origin7.5軟件畫圖,得到TCRT5000輸出的電壓與時間的關系,如圖2所示.
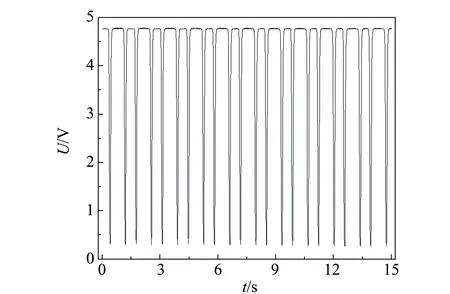
圖2 紅外反射傳感器輸出的電壓與時間的關系
圖2顯示,紅外反射傳感器輸出電壓隨時間周期性出現“平頂寬峰-峽谷-平頂窄峰-峽谷…”,這個周期與三線擺的扭擺周期相關. 結合TCRT5000輸出特性,分析可知:平頂寬峰和平頂窄峰出現時,擋光棒反光效果較差,說明擋光棒離開了紅外反射傳感器;峽谷出現時,擋光棒反光效果較好,說明擋光棒在紅外反射傳感器下方附近. 三線擺做小角度扭擺時,擋光棒近似做簡諧運動. 平頂寬峰的時間比平頂窄峰時間長,說明紅外反射傳感器不在擋光棒運動的平衡位置. 峽谷時間較短,說明擋光棒比較細且經過紅外反射傳感器時的速率較大. 在平頂寬峰和平頂窄峰處有許多隨機出現的毛刺信號,但是它們的頻率與三線擺的運動無關. 采用合適的數據處理方法可以求得三線擺扭擺的周期.
為了將不同頻率的成分分開,可以進行快速傅里葉變換. 為了消除直流成分的干擾,首先,利用Origin7.5軟件calculus下的integrate功能計算圖2中曲線與橫軸圍成的面積,得到總面積是63.194 205,用它除以15后得到平均值為4.213 V. 將圖2中數據統一減去4.213,將曲線下拉成幅度關于橫軸大體對稱,即中心電壓下拉為0的位置,如圖3所示.
圖3 中心電壓為0時的曲線
從圖3可見,中心電壓下拉為0后,曲線整體相當于交流信號. 消除了直流成分的影響后便可以直接進行傅里葉變換,以便將不同頻率的信號分開. 利用Origin7.5軟件的FFT功能對圖3進行快速傅里葉變換,結果如圖4所示.
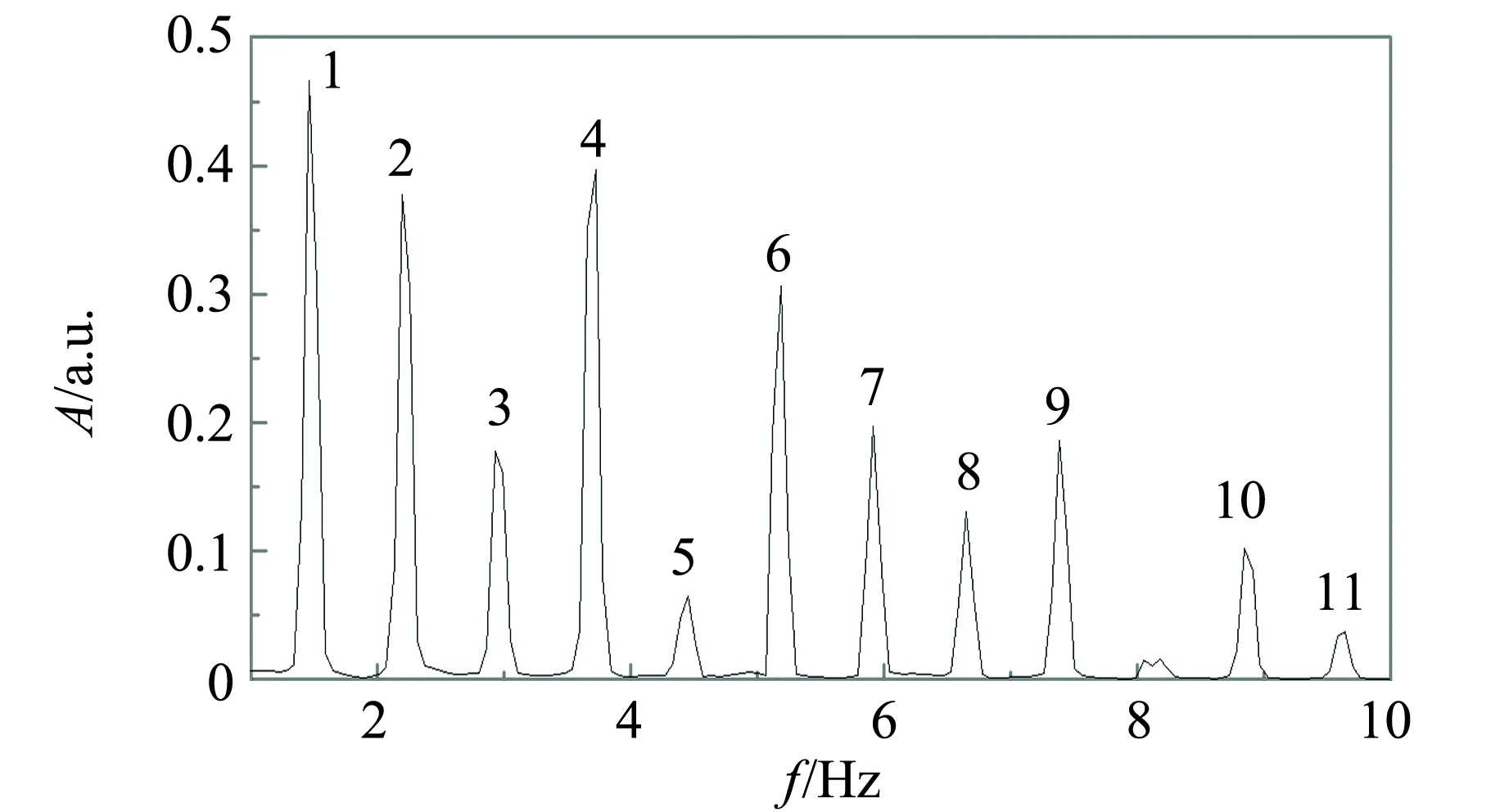
圖4 傅里葉變換結果
圖4中,可以觀察到11個比較明顯的峰,其中,第1個峰強度最大,它應該是三線擺的扭擺造成的,里面蘊含著三線擺扭擺周期的信息. 第3,5,7,9,10個峰分別是第1個峰的2,3,4,5,6倍頻. 第2,4,6,8,11個峰代表其他運動形式.

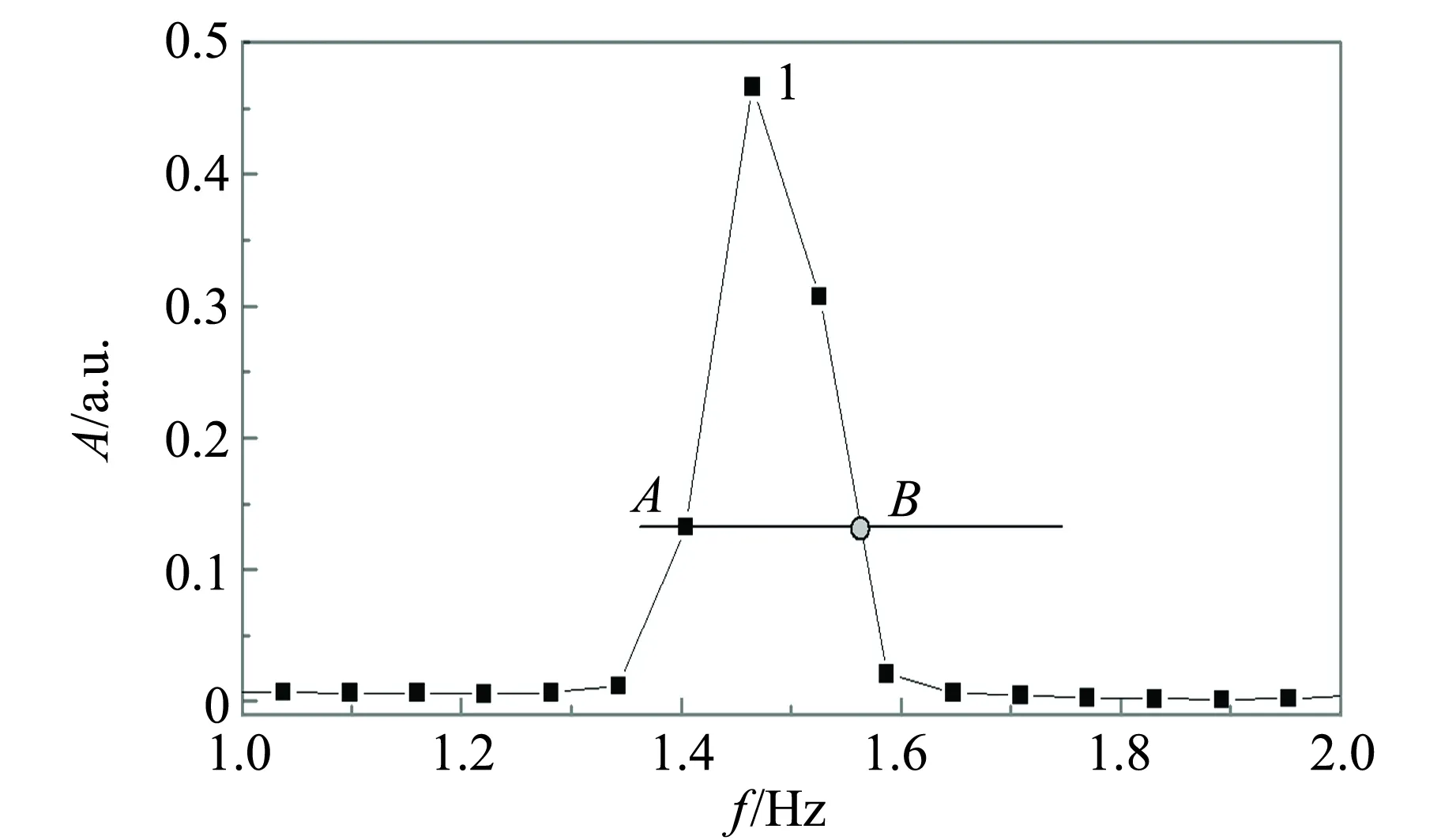
圖5 傅里葉變換結果局部放大圖
4 結束語
在下盤邊緣固定擋光棒,利用固定在擋光棒上方的紅外反射傳感器檢測擋光棒的反光情況,進而得到下盤的扭擺情況;當三線擺作小角度扭擺時,擋光棒近似做簡諧運動運動,擋光棒與紅外反射傳感器之間的距離也周期性變化,紅外反射傳感器輸出的電壓信號也隨時間周期性變化且周期的2倍就是三線擺的扭擺周期. 由于紅外反射傳感器輸出的電壓信號中還包含其他的高頻信號,為了準確得到三線擺的扭擺周期,利用快速傅里葉變換處理數據. 傅里葉變換可以將不同頻率的信號分開,它可以消除高頻信號的影響. 基于紅外反射傳感器的三線擺周期測量裝置結構簡單,調節方便,可以配以合適的數據處理方法測量轉動慣量.
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
數學小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
