一種基于在線辨識和專家系統(tǒng)的飛行器智能姿態(tài)控制方法
2019-01-29 05:17:28張志健王小虎曾憲法
導(dǎo)航定位與授時 2019年1期
張志健,王小虎,曾憲法,何 純
(北京控制與電子技術(shù)研究所,北京 100038)
0 前言
隨著戰(zhàn)場體系化對抗的發(fā)展,進(jìn)攻飛行器面臨著強(qiáng)大的多階段、多層次物理攔截和干擾致盲等威脅;為提升生存能力、提高突防/打擊效率,飛行器飛行軌跡必須靈活可變,以主動破襲復(fù)雜環(huán)境下的攔截系統(tǒng)、并有效打擊各類目標(biāo)的關(guān)鍵部位。現(xiàn)代飛行器姿態(tài)控制具有靈活可變大包線飛行、強(qiáng)耦合、強(qiáng)時變、非線性、大偏差、大不確定性的特點(diǎn)[1-2],同時還要滿足柔性飛行器控制[3]、故障容錯的需求[4]。因此,建模復(fù)雜度的提升、新型飛行器控制問題、容錯需求、自主控制需求、信息化發(fā)展趨勢,對飛行器的控制提出了新的挑戰(zhàn)[5]。
隨著計(jì)算機(jī)性能的提升、測量信息的豐富、信息交互技術(shù)的發(fā)展,在控制系統(tǒng)中綜合智能方法提升飛行器在復(fù)雜動態(tài)條件、大不確定性、部分執(zhí)行機(jī)構(gòu)失效情況下的控制效果,成了姿態(tài)控制的發(fā)展趨勢。智能方法中,專家系統(tǒng)可綜合專家知識、經(jīng)驗(yàn)、飛行器地面試驗(yàn)、仿真數(shù)據(jù),有效提升其他控制方法的適用性[6];結(jié)合神經(jīng)網(wǎng)絡(luò),可通過機(jī)器學(xué)習(xí)自主擴(kuò)充知識庫,應(yīng)對更多復(fù)雜的問題,例如航天器故障診斷[7]。在飛行器智能控制結(jié)構(gòu)方面,文獻(xiàn)[8]詳述了智能自主飛行器的特性,在功能級別描繪了一種智能自主飛行器原理圖;文獻(xiàn)[9]詳細(xì)分析了現(xiàn)代飛行器控制領(lǐng)域的應(yīng)用成果和現(xiàn)代智能系統(tǒng)研究的理論成果后指出,基于動態(tài)專家系統(tǒng)、決策、自組織等的功能—智能系統(tǒng)是未來智能系統(tǒng)綜合發(fā)展的前景方向之一。文獻(xiàn)[8]、文獻(xiàn)[9]中姿態(tài)控制部分是通過最優(yōu)控制實(shí)現(xiàn),需要控制對象的準(zhǔn)確線性化模型,導(dǎo)致控制器設(shè)計(jì)困難。
針對飛行器的姿態(tài)控制,本文提出了一種包含專家系統(tǒng)、在線辨識估計(jì)和控制信號處理的智能姿態(tài)控制方法。其基礎(chǔ)控制器采用現(xiàn)有的非智能方法,但增加了高層級的專家系統(tǒng)模塊,可在飛行器飛行空域、動態(tài)特性、任務(wù)需求發(fā)生變化,或執(zhí)行機(jī)構(gòu)出現(xiàn)故障時及時調(diào)整控制策略和控制參數(shù),從而獲得良好的控制性能。該控制器具有功能明確、結(jié)構(gòu)簡單的特點(diǎn),是一種近期可實(shí)現(xiàn)的綜合型智能控制方案。采用本文提出的智能控制結(jié)構(gòu),設(shè)計(jì)了某飛行器的中段容錯控制器,姿態(tài)發(fā)散概率由無容錯控制時的45%降低到0%,調(diào)姿任務(wù)完成率100%。
1 專家式飛行器智能姿態(tài)控制系統(tǒng)
專家式飛行器智能姿態(tài)控制系統(tǒng)的結(jié)構(gòu)如圖 1所示,含專家系統(tǒng)、辨識估計(jì)、控制信號處理三部分(注:本文著重講控制方法,不討論智能控制系統(tǒng)中的智能測量元件和執(zhí)行機(jī)構(gòu))。

圖1 專家式飛行器智能姿態(tài)控制系統(tǒng)結(jié)構(gòu)圖Fig.1 Block diagram of the expert intelligent attitude control system for flight vehicle
1.1 專家系統(tǒng)模塊
專家系統(tǒng)是該控制結(jié)構(gòu)的頂層、核心,是系統(tǒng)運(yùn)行的大腦。針對飛行器特性、任務(wù)需求、故障狀態(tài)的變化,專家系統(tǒng)根據(jù)專家經(jīng)驗(yàn)、試驗(yàn)數(shù)據(jù)形成的規(guī)則,校核辨識估計(jì)結(jié)果、診斷飛行器故障、更新控制策略及相應(yīng)參數(shù);使飛行器在各種條件下維持良好的控制效果。專家系統(tǒng)的規(guī)則來源于專家知識、實(shí)驗(yàn)數(shù)據(jù)及大量仿真統(tǒng)計(jì);部分難以描述的規(guī)則或需要大量信息佐證的決策,則采用神經(jīng)網(wǎng)絡(luò)參數(shù)表示,通過機(jī)器學(xué)習(xí)、離線學(xué)習(xí)更新。
專家系統(tǒng)由數(shù)據(jù)庫、知識庫、規(guī)則庫和推理機(jī)構(gòu)成。
1.1.1 數(shù)據(jù)庫
數(shù)據(jù)庫中的信息來源有三類,1)地面試驗(yàn)、理論分析推導(dǎo)出來的結(jié)論和依據(jù);2)大量數(shù)學(xué)仿真驗(yàn)證所習(xí)得的參數(shù);3)在線測量,或在線辨識、狀態(tài)估計(jì),經(jīng)推理機(jī)認(rèn)可的信息。數(shù)據(jù)庫信息按來源與用途分類如表1所示。

表1 數(shù)據(jù)庫信息分類Tab.1 Classification of database information
1.1.2 規(guī)則庫和推理機(jī)制
規(guī)則庫是根據(jù)專家知識獲得的動力學(xué)特性、控制策略、控制作用,集中反映了動力學(xué)認(rèn)識、控制知識,是專家系統(tǒng)性能是否優(yōu)良的核心。規(guī)則庫根據(jù)數(shù)據(jù)庫提供的數(shù)據(jù)完成如下工作:1)判斷辨識/估計(jì)結(jié)果是否可信;2)根據(jù)當(dāng)前狀態(tài)和辨識/估計(jì)結(jié)果,更新數(shù)據(jù)庫;3)判斷系統(tǒng)是否出現(xiàn)故障,并診斷故障;4)確定控制策略,調(diào)整控制參數(shù)和指令分配方法。規(guī)則庫通過大量產(chǎn)生式規(guī)則“if…then…”給出。
推理機(jī)制根據(jù)系統(tǒng)當(dāng)前狀態(tài)、歷史狀態(tài),辨識結(jié)果和數(shù)據(jù)庫中的數(shù)據(jù),在規(guī)則庫中搜索相應(yīng)的策略。本文采用正向推理方式,即由事實(shí)數(shù)據(jù)出發(fā),實(shí)時處理系統(tǒng)的輸入、輸出,確定系統(tǒng)的運(yùn)行狀態(tài),在規(guī)則庫中找出相應(yīng)的故障狀態(tài)、控制規(guī)則、參數(shù)調(diào)整策略、指令分配策略。
1.1.3 知識庫
將專家對控制系統(tǒng)穩(wěn)定性、操控性、飛行器上主要設(shè)備性能的認(rèn)識,抽象為控制模式、響應(yīng)特性和參數(shù)自調(diào)整規(guī)則,變成專家系統(tǒng)的知識信息。專家知識是專家在確定飛行器主要參數(shù)時,對各種確定性、不確定性因素做出最佳反應(yīng)的行為的集合。它是工程設(shè)計(jì)人員和飛行控制專家集體智慧的結(jié)晶,必須精心設(shè)計(jì),巧妙構(gòu)思、轉(zhuǎn)化,才能使其實(shí)用性更強(qiáng)、應(yīng)用范圍更廣。
1.2 辨識估計(jì)模塊
辨識估計(jì)模塊對影響飛行器控制性能的主要參數(shù)進(jìn)行在線辨識。為拓展專家知識的在線應(yīng)用,必須盡可能地辨識或估計(jì)飛行器飛行中的時域、頻域、結(jié)構(gòu)特征,并轉(zhuǎn)化為可供專家系統(tǒng)推理、計(jì)算的量化值,方便與數(shù)據(jù)庫中的信息對比。專家系統(tǒng)推理機(jī)根據(jù)飛行機(jī)動情況和專家知識庫,對辨識結(jié)果進(jìn)行處理,判定數(shù)據(jù)庫是否更新,飛行器是否正常工作,辨識估計(jì)模塊、控制信號處理模塊是否需要調(diào)整。對于飛行器姿態(tài)控制,在線辨識的數(shù)據(jù)包括:發(fā)動機(jī)的推力大小、當(dāng)前狀態(tài)在飛行包絡(luò)中的位置、結(jié)構(gòu)振動頻率、控制效率等。
1.3 控制信號處理模塊
控制信號處理模塊是飛行器控制的基礎(chǔ),具備完整的控制功能;控制對象復(fù)雜度較低時,可獨(dú)立完成控制任務(wù)。專家系統(tǒng)根據(jù)任務(wù)需求、對象特性變化、故障診斷結(jié)果,調(diào)節(jié)控制信號處理模塊中的控制策略、控制參數(shù),從而完成不同的控制任務(wù)。
1.3.1 數(shù)據(jù)濾波
當(dāng)彈性振動與剛體控制帶寬需求相互分離,設(shè)計(jì)對剛體穩(wěn)定控制影響小的彈性自適應(yīng)濾波網(wǎng)絡(luò),實(shí)現(xiàn)剛體飛行器姿控設(shè)計(jì)、彈性抑制濾波的相互獨(dú)立,可有效簡化控制系統(tǒng)設(shè)計(jì)的復(fù)雜度。運(yùn)行中,專家系統(tǒng)根據(jù)彈性振動辨識結(jié)果和數(shù)據(jù)庫存儲的歷史信息,實(shí)時調(diào)整濾波網(wǎng)絡(luò)。因?yàn)殚]環(huán)系統(tǒng)中彈性抑制與振動辨識相互影響;要實(shí)現(xiàn)良好的自適應(yīng)抑制,濾波器參數(shù)的調(diào)整依賴于專家對在線彈性振動特性、飛行器結(jié)構(gòu)特性、動態(tài)控制過程對辨識結(jié)果影響的認(rèn)識,以及地面試驗(yàn)預(yù)示規(guī)律。
1.3.2 控制器
根據(jù)對象特點(diǎn)、任務(wù)需求的不同,可采用不同的控制方案,如經(jīng)典PID、LPV控制器、變結(jié)構(gòu)控制器等。由專家系統(tǒng)決策,更新控制參數(shù)。
1.3.3 指令分配
不旋轉(zhuǎn)飛行器的控制量一般按3個通道給出,而實(shí)際飛行器的操縱機(jī)構(gòu)通常存在共用或冗余;例如可擺動單噴管用于控制俯仰、偏航2個通道;4個空氣舵用于控制飛行器的俯仰、偏航、滾轉(zhuǎn)通道,8個姿控噴管控制三通道姿態(tài)等。指令分配策略的作用是根據(jù)三通道控制需求,得到各操縱機(jī)構(gòu)唯一確定的執(zhí)行指令。指令分配策略由控制系統(tǒng)專家設(shè)計(jì),存儲于數(shù)據(jù)庫、規(guī)則庫中,推理機(jī)進(jìn)行分配策略選擇。
以上為本文智能控制方案的結(jié)構(gòu)和實(shí)現(xiàn)途徑,本文以某飛行器中段容錯控制為例,介紹了該控制結(jié)構(gòu)的實(shí)現(xiàn)方式。
2 在線狀態(tài)估計(jì)+專家系統(tǒng)的智能主動容錯控制
如果姿態(tài)控制系統(tǒng)能實(shí)現(xiàn)調(diào)姿需求,故障是否被精確定位并不重要;基于這一想法,將故障分為可控故障和不可控故障兩類,將被動容錯與主動容錯結(jié)合,最終實(shí)現(xiàn)綜合容錯控制方案。
受控飛行器,無故障或者發(fā)生故障但仍能實(shí)現(xiàn)調(diào)姿任務(wù)、滿足指標(biāo)需求,則該故障為可控故障;否則為不可控故障。若專家系統(tǒng)包含多個被動容錯的魯棒控制策略,可綜合覆蓋所有故障;則發(fā)生故障時,總存在一個控制策略保證系統(tǒng)可控。因此,若專家系統(tǒng)能及時確認(rèn)當(dāng)前控制策略發(fā)生不可控故障,并切換到可控控制策略,則必然能保證系統(tǒng)穩(wěn)定可控。故障診斷常采用狀態(tài)觀測器進(jìn)行狀態(tài)重構(gòu),從而實(shí)現(xiàn)了執(zhí)行機(jī)構(gòu)或測量裝置的故障診斷。本文為了更好地表征飛行器是否處于控制器的可控范圍內(nèi),以控制策略在可控故障下的執(zhí)行機(jī)構(gòu)響應(yīng)作為跟蹤觀測器的輸入,重構(gòu)系統(tǒng)狀態(tài)。若發(fā)生不可控故障則重構(gòu)的狀態(tài)迅速偏離實(shí)際狀態(tài),從而實(shí)現(xiàn)可控故障與不可控故障的快速確診。
具體容錯問題和設(shè)計(jì)方法如下。
2.1 八姿控切向布局故障容錯控制問題
某飛行器在稀薄大氣層飛行期間,采用8個姿控噴管控制3個通道,布局如圖 2所示;需進(jìn)行大角度快速觀星調(diào)姿,運(yùn)動學(xué)耦合較大,用四元數(shù)描述其運(yùn)動:
Mc=Bu(t)
(1)
其中,Mc為姿控噴管控制力矩;Md為氣動力、干擾力矩之和;q=[q0,q1,q2,q3]T為飛行器姿態(tài)四元數(shù);ωB=[0,ωbx,ωby,ωbz]T為增廣角速度。
u(t)=[u1(t),…,u8(t)]T為8個姿控的響應(yīng),ui(t)∈[0,1],具有開關(guān)特性,與指令之間存在最大0.2s的延遲;故障模式考慮不可關(guān)閉和不可開啟兩種狀態(tài)。
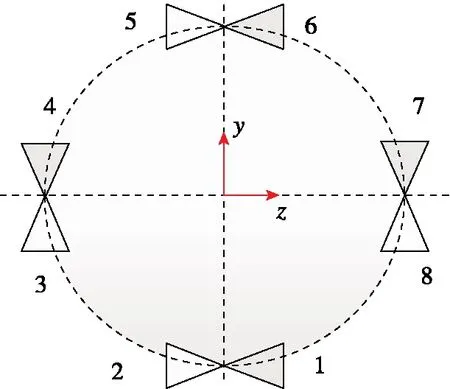
圖2 飛行器姿控噴管姿控布局(尾視圖)Fig.2 Layout of attitude control engine of the flight vehicle (tail view)
本算例模型參數(shù)如下:
B=


由于發(fā)生一個姿控噴管故障已經(jīng)是小概率事件,因此,忽略多個姿控噴管同時故障的情形。其故障診斷具有非線性、過驅(qū)動特性,通用、理論完備的故障診斷方法仍然是故障診斷領(lǐng)域的一個難點(diǎn)[10-12]。
2.2 故障狀態(tài)估計(jì)+專家系統(tǒng)的智能容錯控制方法設(shè)計(jì)
2.2.1 故障狀態(tài)估計(jì)模塊設(shè)計(jì)
姿控噴管響應(yīng)延遲會影響狀態(tài)重構(gòu),為減小對故障診斷的影響,本文使用2個結(jié)構(gòu)相同的跟蹤觀測器,1個用于跟蹤各種狀態(tài)下的姿態(tài),1個重構(gòu)當(dāng)前控制策略下故障可控時的狀態(tài)。
v=a0Δθ+a1Δω
am(t)=fa(c)(v)
(2)
其中,am(t)為跟蹤模塊角加速度控制量;Δθ、Δω為狀態(tài)估計(jì)值與實(shí)測值的角度偏差、速度偏差;a0、a1為PD控制增益,為保證跟蹤的快速性,可取較大值,本文取值a0=100、a1=100;函數(shù)fa(c)(v)為三通道可用角加速度矢量,fa(v)為任意可能角加速度,fa(c)(v)為發(fā)生可控故障且指令為v時的可取角加速度。該信息作為飛控專家系統(tǒng)的已知信息存儲于數(shù)據(jù)庫中,可表征飛行器在不同姿控開關(guān)指令下的動態(tài)響應(yīng);判定系統(tǒng)是否發(fā)生故障的先驗(yàn)信息。
fa(v)取值滿足:
fa(v)=v*
(3)
式中,Ti為姿控噴管的不同開關(guān)組合對應(yīng)的標(biāo)準(zhǔn)角加速度(不考慮偏差),T為Ti全體集合;Δ為氣動力、姿控推力偏差等所有干擾力矩產(chǎn)生的最大干擾角加速度。
其中:Ti=[Ti,x,Ti,y,Ti,z]T,為不同噴管開關(guān)的標(biāo)稱控制力矩;將方向相反成對安裝的噴管構(gòu)成n12,n34,n56,n78這4個虛擬發(fā)動,分別可取1、0、-1三種值,對應(yīng)繞x軸產(chǎn)生負(fù)力矩、無力矩、正力矩,共3×3×3×3=81種開關(guān)組合。以x通道為例,Tix可表達(dá)如下:
Ti,x=n12A12,x+n34A34,x+n56A56,x+n78A78,x
i=33·(n12+1)+32·(n34+1)+3·(n56+1)+
(n78+1)
(4)
單個噴管在某通道產(chǎn)生的標(biāo)稱角加速度具體取值為:
A12,x=A56,x=0.2269,A34,x=A78,x=0.2968
A12,y=A56,y=0.0836,A34,y=A78,y=0
A12,z=A56,z=0,A34,z=A78,z=0.084
以3、4、7、8號噴管控制滾轉(zhuǎn)和俯仰通道為例,fa(v)取值范圍如圖 3所示。由于執(zhí)行機(jī)構(gòu)的任意響應(yīng)都被考慮,狀態(tài)跟蹤模塊可跟蹤任意故障條件下的飛行器姿態(tài)。

圖3 滾轉(zhuǎn)、俯仰通道角加速度取值范圍Fig.3 Value range of angular acceleration for roll and pitch channels
fc(v)取值滿足:
fc(v)=v*
(5)
其中,T(u,Δt,F)為考慮控制指令u、噴管開/關(guān)延遲Δt、當(dāng)前控制策略的可控故障F時,可能的角加速度取值集合,是T的子集,在飛行中實(shí)時計(jì)算。仍以3、4、7、8號噴管控制滾轉(zhuǎn)、俯仰通道為例:在偏航干擾力矩小于一個噴管產(chǎn)生的控制力時,1、2、5、6號噴管任一故障都屬于可控故障,n12、n56可取值1,0,-1;若(t-Δt,t)時間內(nèi),滾轉(zhuǎn)指令為1、俯仰指令為0,則可控故障狀態(tài)下,4個虛擬姿控取值范圍是:n12,n56∈{-1,0,1},n34=n78=-1(通道控制需求和噴管指令對應(yīng)關(guān)系見表 2)。俯仰、滾轉(zhuǎn)通道fc(v)取值范圍如圖 4陰影部分所示。仿真中,Δt取值0.12s,由于飛控機(jī)計(jì)算周期0.005s,取40個歷史數(shù)據(jù),綜合考慮所出現(xiàn)的指令。

圖4 指令約束下滾轉(zhuǎn)、俯仰通道角加速度取值范圍Fig.4 Value range of angular acceleration for roll and pitch channels under conmand constraint
可控故障重構(gòu)模塊具有如下性質(zhì):無故障或出現(xiàn)可控故障時,可有效跟蹤實(shí)際狀態(tài);出現(xiàn)不可控故障時,重構(gòu)的狀態(tài)迅速偏離實(shí)際狀態(tài)。因此,可以將故障診斷問題轉(zhuǎn)化為重構(gòu)狀態(tài)Xc和跟蹤狀態(tài)Xa的偏差大小判斷。
2.2.2 規(guī)則庫和推理機(jī)制確定
(1)故障診斷流程啟動門限
根據(jù)Xa與Xc角偏差Δσx,y,z判斷當(dāng)前分配方法是否可控:當(dāng)某通道角偏差Δσi大于門限值Δf,判定出現(xiàn)當(dāng)前分配模式為不可控故障,切換指令分配方式、并將Xc賦值為Xa,然后進(jìn)行對應(yīng)分配模式的可控性監(jiān)測。Δf由如下方式確定:
(6)
β為單個噴管開啟時該通道產(chǎn)生的最大加速度;Δt為噴管指令與響應(yīng)不一致時間最大值。為避免噴管響應(yīng)延遲、測量噪聲導(dǎo)致誤判,tm取值大于3倍噴管響應(yīng)延遲時間。本算例取Δf=1.8°。
(2)覆蓋可控故障的分配策略設(shè)計(jì)
當(dāng)噴管硬件冗余時,存在多種不同的指令分配方式,設(shè)為di,其中i代表不同的分配方式。設(shè)指令分配方式集合為D={dj|j=1,2,…,m},定義映射:
cji=dj(Fi)
當(dāng)cji=1時,表示指令分配方法dj下,故障Fi可控;cji=0表示不可控。F0表示無故障,由于無故障狀態(tài)下,采用dj時系統(tǒng)受控,因此有
dj(F0)=1,?dj∈D
定義指令分配方式dj的可控故障集為:
Cj={Fi|Fi∈F,且dj(Fi)=1,其中dj∈D}
此時,只要各分配方法dj對應(yīng)的可控故障集Cj滿足:
(7)
即對?Fi∈F,?dj∈D,使得dj(Fi)=1。
本實(shí)例設(shè)計(jì)了2個指令分配策略,策略d1:俯仰、滾轉(zhuǎn)共用3、4、7、8號噴管;策略d2:偏航、滾轉(zhuǎn)共用1、2、5、6噴管。不同控制需求下,噴管開啟方式見表 2、表 3。表中下標(biāo)x、y、z代表滾轉(zhuǎn)、偏航、俯仰通道。

表2 耦合通道指令分配方法(注:策略d1取uz-ux)Tab.2 Control commands allocation for coupling channel

表3 獨(dú)立通道指令分配方法Tab.3 Control commands allocation for independent channel
(3)分配策略調(diào)整規(guī)則與故障定位規(guī)則
三條主要規(guī)則:
1)當(dāng)任意通道角偏差大于故障門限,即Δσi>Δf,則確認(rèn)發(fā)生故障。
2)當(dāng)故障可定位,則直接切換到對應(yīng)的可控分配策略。即:當(dāng)max(|Δσx|,|Δσy|,|Δσz|)>Δf且?i∈{1,2,…,8}使得下式成立:
∠([Δσx,Δσy,Δσz]T,T(Fi))<Δα
其中,T(Fi)為第i個噴管工作時單獨(dú)產(chǎn)生的力矩矢量;Δα為夾角判定門限。
則直接切換到分配策略dj,其中dj滿足:
dj(Fi)=1
3)若故障不能定位,即不滿足2)中條件時,順序切換分配方式,取di=di+1(當(dāng)前策略為di)。
因?yàn)榘l(fā)生故障時,可在很短時間內(nèi)判斷當(dāng)前分配方法下系統(tǒng)是否可控,而D元素個數(shù)有限;所以當(dāng)滿足公式時,總能在有限步驟、有限時間內(nèi)找到使任一故障可控的分配方法。所以,即使故障不能定位,也能保證容錯控制性能。
2.2.3 控制信號處理模塊
控制器處理模塊是實(shí)現(xiàn)容錯控制的基礎(chǔ),但不是設(shè)計(jì)的重點(diǎn),下面簡要說明。
控制策略:
飛行器采用噴管進(jìn)行控制,具有開關(guān)特性,控制器采用變結(jié)構(gòu)控制方式:
h*=Δθ*+a*ω*
(1)
其中:
1)下標(biāo)*可分別取值x、y、z,代表滾轉(zhuǎn)、偏航、俯仰通道;
2)u*為對應(yīng)通道噴管開關(guān)需求,取值0表示關(guān)機(jī),-1表示偏差為負(fù)需開啟正向加速噴管,1表示偏差為正需開啟負(fù)向加速噴管;
3)參數(shù)a*、b*取值為:ax=ay=az=0.035、bx=0.9,by=bz=1.2。
指令分配:
指令分配方式參見表 2、表 3。
2.3 六自由度仿真結(jié)果
仿真中偏差有:大氣密度偏差100%,氣動力系數(shù)偏差30%,轉(zhuǎn)動慣量偏差10%,噴管推力偏差15%,響應(yīng)時間差0.12s,推力大小不同步15%。
圖 5、圖 6所示分別為1號噴管故障時,控制不容錯、控制容錯仿真結(jié)果。不容錯時,滾轉(zhuǎn)、偏航通道150s開始出現(xiàn)負(fù)滾轉(zhuǎn)角偏差、正偏航角偏差,此時策略為d2,開啟1號噴管才能消除偏差,但1號噴管失效,因此姿態(tài)不可控。當(dāng)采用容錯控制,可切換指令分配策略,三通道姿態(tài)得到有效控制。

圖5 非容錯控制下姿態(tài)偏差曲線Fig.5 Curve of attitude response under common control

圖6 容錯控制下姿態(tài)偏差曲線Fig.6 Curve of attitude response under fault tolerant control
圖 7所示為容錯控制下,1號噴管故障時,重構(gòu)狀態(tài)與跟蹤狀態(tài)的三通道偏差。偏航有3次超過門限1.8°,觸發(fā)了控制策略的切換。圖 8所示為指令分配策略的變化情況,圖中分配方法不等于d1、d2時,為不使用8個姿控噴管的精確調(diào)姿階段。
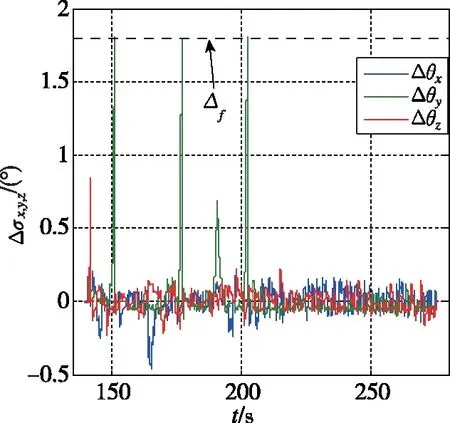
圖7 重構(gòu)狀態(tài)和跟蹤狀態(tài)間的角度偏差(下標(biāo)x,y,z分別表示對應(yīng)轉(zhuǎn)軸)Fig.7 Augular errors between reconstructed state and estimated state

圖8 容錯控制下:故障診斷與分配方法變化曲線Fig.8 Curve of fault diagnosis and control strategy under fault tolerant control
圖 9所示為1~8號噴管分別失效時,各對應(yīng)771條極限組合干擾仿真的調(diào)姿偏差統(tǒng)計(jì)值。結(jié)果表明,觀星調(diào)姿均滿足指標(biāo)需求。一個姿控出現(xiàn)故障時,調(diào)姿任務(wù)的完成率100%,對不可控故障漏判率為0%。表4所示為故障診斷關(guān)鍵指標(biāo)統(tǒng)計(jì)結(jié)果。
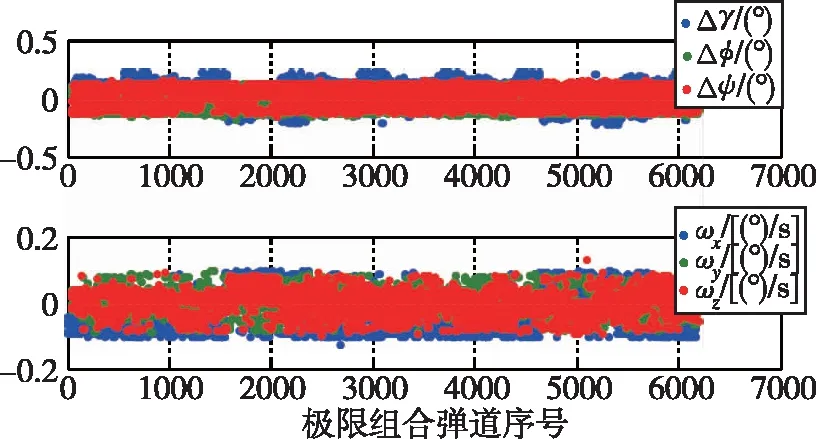
圖9 觀星調(diào)姿觀星前姿態(tài)控制精度Fig.9 Precision of attitude control for measuring star

表4 故障診斷關(guān)鍵指標(biāo)統(tǒng)計(jì)Tab.4 Statistics of fault diagnosis
3 結(jié)論
本文提出了一種基于在線辨識和專家系統(tǒng)的飛行器智能控制方法,應(yīng)用專家知識,能明顯提升系統(tǒng)的適應(yīng)性、魯棒性和控制效果,是一種近期可實(shí)現(xiàn)的智能控制方法。該方法特點(diǎn)和后續(xù)研究方向:
1)要充分發(fā)揮專家系統(tǒng)的性能,一是要精心設(shè)計(jì)專家知識庫、規(guī)則庫;一是要發(fā)揮在線辨識和估計(jì)的作用,充分獲取可用于知識推理、規(guī)則搜索的信息。知識庫、規(guī)則庫的設(shè)計(jì)既是設(shè)計(jì)重點(diǎn)也是設(shè)計(jì)難點(diǎn),其中的規(guī)則信息主要來自專家的認(rèn)識和經(jīng)驗(yàn)。
2)對于故障診斷類需要大量信息相互佐證的知識,可以通過機(jī)器學(xué)習(xí)的方式形成網(wǎng)絡(luò)化參數(shù)存儲在專家知識庫中;借助機(jī)器學(xué)習(xí)知識,可以提升系統(tǒng)的適應(yīng)性、魯棒性和控制效果。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31