基于INS/GNSS緊耦合組合的逐步誘導(dǎo)式欺騙檢測(cè)算法研究
2019-01-29 05:23:54武智佳吳文啟唐康華
導(dǎo)航定位與授時(shí) 2019年1期
武智佳,吳文啟,劉 科,唐康華
(國(guó)防科技大學(xué)智能科學(xué)學(xué)院,長(zhǎng)沙 410073)
0 引言
在近年來(lái)的幾次局部戰(zhàn)爭(zhēng)中,依靠衛(wèi)星導(dǎo)航的設(shè)備與制導(dǎo)武器在戰(zhàn)場(chǎng)中扮演了極為重要的角色[1],但是也暴露了全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GNSS)信號(hào)弱,極易受到干擾和欺騙等缺點(diǎn),很容易實(shí)現(xiàn)讓GNSS接收機(jī)優(yōu)先地捕捉到欺騙信號(hào),并且具有較強(qiáng)的隱蔽性[2-3]。欺騙式干擾主要分為生成式和轉(zhuǎn)發(fā)式,相比于生成式,轉(zhuǎn)發(fā)式不僅針對(duì)民碼信號(hào),對(duì)軍碼信號(hào)也可以通過(guò)干擾器進(jìn)行延時(shí)放大并轉(zhuǎn)發(fā),進(jìn)而影響接收機(jī)獲取的偽距信息[4]。但當(dāng)導(dǎo)航和制導(dǎo)設(shè)備采用慣性導(dǎo)航系統(tǒng)(Inertial Navigation System,INS)/GNSS組合導(dǎo)航方式時(shí),利用INS的短期穩(wěn)定性,這種延時(shí)轉(zhuǎn)發(fā)的方式容易引起定位跳變被INS識(shí)別,進(jìn)而停止GNSS對(duì)INS的校正。為此,文獻(xiàn)[5]研究了軌跡誘導(dǎo)式欺騙方法,通過(guò)雷達(dá)等監(jiān)測(cè)方法,探知載體的位置和速度信息,然后利用轉(zhuǎn)發(fā)式干擾器,實(shí)施相應(yīng)的位置欺騙和速度欺騙策略,使目標(biāo)載體獲得錯(cuò)誤位置及速度,在不易被INS識(shí)別的情況下逐步誘導(dǎo)載體控制器拉偏運(yùn)行軌跡。而現(xiàn)階段從慣性信息輔助方面提出的抗欺騙方法,主要都是利用單方面的慣性信息,如加速度計(jì)輔助對(duì)比[6]、位置輔助接收機(jī)自體完好性監(jiān)控(Receiver Autonomous Integrity Monitoring,RAIM)檢測(cè)[7]、位置跟蹤數(shù)學(xué)評(píng)估[8]、基于載波相位雙差的姿態(tài)輔助[9-10]、通過(guò)多普勒測(cè)速的速度輔助[11]等,對(duì)這種逐步誘導(dǎo)的欺騙方式,單一狀態(tài)的慣性信息輔助檢測(cè)效果會(huì)出現(xiàn)不明顯的情況。
為此本文提出了一種基于INS/GNSS緊耦合組合的逐步誘導(dǎo)式欺騙檢測(cè)算法,從速度和位置兩種慣性信息出發(fā),研究了位置欺騙和速度欺騙對(duì)偽距測(cè)量和偽距率測(cè)量帶來(lái)的影響,并結(jié)合INS短時(shí)間位置誤差傳播模型,分析了真實(shí)信號(hào)和欺騙信號(hào)下偽距和偽距率變化的一致性關(guān)系,并構(gòu)造了時(shí)間序列模型來(lái)實(shí)現(xiàn)信號(hào)的判別,并對(duì)不同的判別結(jié)果做出不同響應(yīng)。最后根據(jù)逐步誘導(dǎo)式欺騙原理,設(shè)計(jì)了仿真實(shí)驗(yàn)驗(yàn)證本算法的有效性。
1 逐步誘導(dǎo)式信號(hào)欺騙原理
逐步誘導(dǎo)式欺騙[5]的基本原理即通過(guò)雷達(dá)等監(jiān)測(cè)方法去探測(cè)目標(biāo)載體的位置和速度信息,設(shè)計(jì)欺騙策略使GNSS接收機(jī)捕獲欺騙信號(hào),解算出錯(cuò)誤的位置和速度,以小的定位偏移逐步誘導(dǎo)載體偏離預(yù)定軌跡。

(1)
式中,Δρj為欺騙偽距在真實(shí)偽距基礎(chǔ)上的附加偽距,而速度欺騙是根據(jù)欺騙策略中設(shè)定的欺騙速度,通過(guò)調(diào)整速度解算所需要的多普勒頻率來(lái)達(dá)到欺騙目的。而偽距率的通常計(jì)算方法為
(2)

(3)

2 INS輔助的欺騙檢測(cè)方案
圖1所示為本研究欺騙檢測(cè)流程的示意圖,先在短時(shí)間內(nèi)進(jìn)行慣性導(dǎo)航,獲取INS數(shù)據(jù)和GNSS數(shù)據(jù)。經(jīng)過(guò)檢測(cè)算法判定,對(duì)于真實(shí)信號(hào),利用這些數(shù)據(jù)重新進(jìn)行偽距、偽距率緊耦合組合,以修正原慣性導(dǎo)航軌跡和INS輸出,然后進(jìn)入下一短周期繼續(xù)該流程,若為欺騙信號(hào),則繼續(xù)用慣性導(dǎo)航,并采取相應(yīng)措施。

圖1 欺騙檢測(cè)流程示意圖Fig.1 Schematic diagram of deception detection process
2.1 短時(shí)間欺騙檢測(cè)模型

(4)
因載體的運(yùn)動(dòng)可以在ECEF坐標(biāo)系內(nèi)分解為3個(gè)坐標(biāo)軸的運(yùn)動(dòng),所以根據(jù)文獻(xiàn)[13]可知,對(duì)于INS在無(wú)校正狀態(tài)下,每個(gè)分運(yùn)動(dòng)在短時(shí)間內(nèi)的位置誤差隨時(shí)間的變化關(guān)系可近似為二次函數(shù)。由此分析可知,接收機(jī)在短時(shí)間內(nèi)的真實(shí)位置可由INS輸出的位置經(jīng)誤差修正后估計(jì)得到,若從t0時(shí)刻開(kāi)始對(duì)真實(shí)位置的坐標(biāo)進(jìn)行估計(jì),則在tk=t0+tm時(shí)刻真實(shí)位置對(duì)應(yīng)的ECEF估計(jì)坐標(biāo)為
(5)

(6)
式中:

(7)
(8)
整理式(8)可得
ey,t0κy1+ez,t0κz1)tm+(ex,t0Δx+ey,t0Δy+
(9)

(10)

(11)

≈2(ex,t0κx2+ey,t0κy2+ez,t0κz2)tm+
(ex,t0κx1+ey,t0κy1+ez,t0κz1)

(12)

(13)


(14)
(15)

(16)

綜上分析,通過(guò)對(duì)比2個(gè)時(shí)間序列模型的擬合參數(shù)和觀察2個(gè)時(shí)間序列模型的擬合程度即可實(shí)現(xiàn)對(duì)欺騙信號(hào)的檢測(cè)。
2.2 INS/GNSS緊耦合組合系統(tǒng)狀態(tài)方程
本文采用偽距、偽距率緊耦合組合導(dǎo)航方案,將導(dǎo)航坐標(biāo)系選為北東地,其緊耦合組合系統(tǒng)狀態(tài)方程包含INS和GNSS兩部分,可寫(xiě)為
=F(t)X(t)+W(t)G(t)
(17)
其中,F(xiàn)(t)為系統(tǒng)狀態(tài)矩陣,W(t)為過(guò)程噪聲矩陣,G(t)為系統(tǒng)噪聲矩陣,17階狀態(tài)向量X(t)為
X(t)= (φE,φN,φU,δvE,δvN,δvU,δL,δλ,δh,
(18)

2.3 INS/GNSS緊耦合組合系統(tǒng)量測(cè)方程
(1)偽距量測(cè)方程
已知慣性導(dǎo)航的位置為(xINS,yINS,zINS),則其所對(duì)應(yīng)的衛(wèi)星信號(hào)j的計(jì)算偽距為
(19)
結(jié)合接收機(jī)測(cè)量改正后的偽距ρG,得到偽距的量測(cè)方程
Zρ(t)=ρINS-ρG=Hρ(t)X(t)+Vρ(t)
(20)
其中,Vρ(t)為偽距測(cè)量噪聲。根據(jù)狀態(tài)向量的定義,需要把大地坐標(biāo)誤差 (δL,δλ,δh)變化為ECEF坐標(biāo)誤差 (δx,δy,δz),變換矩陣為
(21)
則觀測(cè)矩陣
(22)


(2)偽距率量測(cè)方程
(23)
(24)


(25)
則觀測(cè)矩陣
(26)

將式(20)和式(24)合并,得到偽距、偽距率緊耦合組合系統(tǒng)的量測(cè)方程
(27)
3 仿真驗(yàn)證
為了驗(yàn)證算法的可行性和有效性,本文利用無(wú)人機(jī)飛行數(shù)據(jù),根據(jù)逐步誘導(dǎo)式欺騙原理設(shè)計(jì)欺騙方案,其仿真條件為:
1)可見(jiàn)衛(wèi)星7顆,仿真時(shí)長(zhǎng)10min。GNSS數(shù)據(jù)采樣頻率2Hz,慣性傳感器信號(hào)輸出頻率200Hz。短時(shí)間周期設(shè)定為5s。初始經(jīng)緯度分別為50.9887°和12.5176°,高程為229.2790m。
2)姿態(tài)角初始對(duì)準(zhǔn)精度0.5°,陀螺隨機(jī)漂移10(°)/h,加表零偏為0.3mg,偽距測(cè)量精度25m,偽距率測(cè)量精度0.5m/s。


圖2 真實(shí)信號(hào)時(shí)各短周期擬合參數(shù)差值Fig.2 Short period fitting parameter differences of real signal

為了驗(yàn)證算法的有效性,設(shè)計(jì)仿真在450s時(shí),根據(jù)雷達(dá)定位和測(cè)速性能[15]設(shè)計(jì)表 1的ΔP和ΔV,并結(jié)合文獻(xiàn)[5]設(shè)計(jì)欺騙信號(hào),對(duì)衛(wèi)星坐標(biāo)進(jìn)行Sagnac改正。由式(10)和式(12)可知,其INS位置相對(duì)于衛(wèi)星的余弦向量也影響著擬合參數(shù)的大小,仿真觀察余弦向量與誤差模型參數(shù)組合后數(shù)值較大的5號(hào)星為參考,并觀察第一個(gè)被欺騙短周期的參數(shù)值關(guān)系以及相關(guān)數(shù)值變化趨勢(shì)。表中位置偏移ΔP=[Δpx,Δpy,Δpz],速度偏移ΔV=[Δvn,Δve,Δvd]。

表1 欺騙檢測(cè)效果分析Tab.1 Analysis of the deception detection results
在無(wú)位置和速度欺騙時(shí),表中2個(gè)數(shù)值分別為0.0282和0.6237。
在圖3和圖4中,ΔV0代表無(wú)欺騙時(shí)的時(shí)間序列,標(biāo)簽中數(shù)字代表擬合優(yōu)度系數(shù)R-square,用于評(píng)價(jià)曲線的擬合程度。由表1可以看出,在小的定位偏移下,速度偏移在2m/s以上時(shí),表中差值產(chǎn)生顯著變化,且隨著偏移量的增加逐漸增大,據(jù)此可以檢測(cè)出欺騙信號(hào)的存在。從圖3和圖4中可以看出,在無(wú)欺騙信號(hào)存在時(shí),時(shí)間序列sp5和sv5基本可以按二次函數(shù)和一次函數(shù)做擬合,且擬合結(jié)果之差趨向于0,證明了真實(shí)信號(hào)的2個(gè)序列模型參數(shù)具有一致性。而存在欺騙信號(hào)后,速度偏移在2m/s以上時(shí),隨著偏移量的增加,各時(shí)刻的數(shù)據(jù)逐漸變大,并且在短周期內(nèi)數(shù)據(jù)趨勢(shì)滿足函數(shù)模型的效果變差,即2個(gè)模型參數(shù)不一致性變大,由此可知,該算法對(duì)這種誘導(dǎo)式欺騙較為敏感。

圖3 位置/偽距時(shí)間序列sp5趨勢(shì)Fig.3 Trend of the position/pseudo-range time series sp5
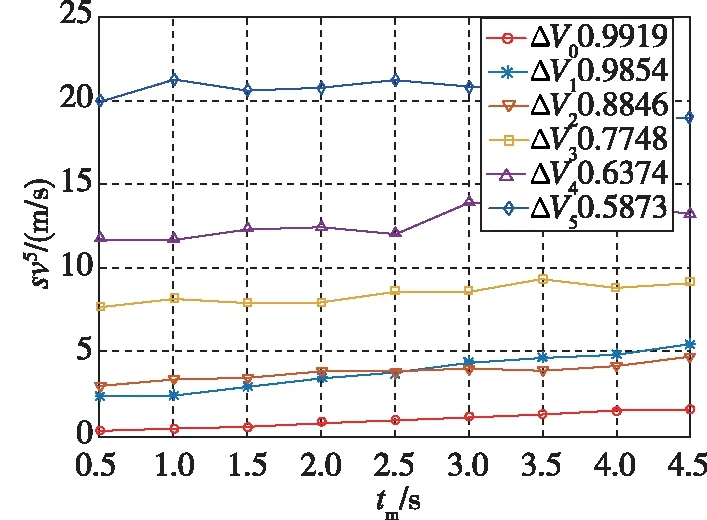
圖4 速度/偽距率時(shí)間序列sv5趨勢(shì)Fig.4 Trend of the velocity/pseudo-range rate time series sv5
4 結(jié)論
本算法是針對(duì)逐步誘導(dǎo)式欺騙,在短時(shí)間內(nèi)進(jìn)行純慣性導(dǎo)航,從位置和速度兩種慣性信息出發(fā),并基于在真實(shí)信號(hào)和欺騙信號(hào)下,偽距和偽距率隨時(shí)間變化的一致性關(guān)系提出了一種欺騙檢測(cè)方法,主要結(jié)論如下:
1)該方法既能檢測(cè)到單一的位置欺騙或速度欺騙,又能快速地檢測(cè)到對(duì)小定位偏移下的誘導(dǎo)欺騙,便于載體控制者及時(shí)地采取措施,彌補(bǔ)了傳統(tǒng)方法單一狀態(tài)輔助檢測(cè)可能出現(xiàn)大概率漏檢的缺陷。
2)存在速度和位置偏移時(shí),其時(shí)間序列模型的擬合程度變差,據(jù)此也可以反映出欺騙信號(hào)的存在。且算法基于INS短時(shí)間的誤差傳播關(guān)系,因此,對(duì)慣導(dǎo)設(shè)備要求不高。
3)本算法是從偽距方程和偽距率方程出發(fā)進(jìn)行探究,其接收機(jī)偽距、偽距率測(cè)量精度越高,檢測(cè)效果越好。
綜上,本文提出的方法和結(jié)論為這種較為隱蔽的逐步誘導(dǎo)式欺騙檢測(cè)提供了參考方案,在無(wú)人機(jī)對(duì)抗等導(dǎo)航領(lǐng)域有著較強(qiáng)的應(yīng)用價(jià)值。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19