VOF方法在升魚機集誘魚系統中的應用
2019-01-16 12:22:36王政平洪偉輝賈東遠
水利規劃與設計 2018年12期
王政平,洪偉輝,賈東遠
(中水珠江規劃勘測設計有限公司,廣東 廣州 510000)
兩相流現象在水利工程中十分普遍,如風生流、霧化、空化等[1]。20世紀40年代開始有學者用兩相流的統一觀點系統地總結歸納液體中的各種現象[2],50年代出現空化理論、激波在混合兩相介質中的傳播、兩相流邊界層等相關的論文[3],80年代隨著一些兩相流專著的出版,兩相流開始得以迅速發展[4]。近年來,隨著CFD的發展,國內外許多學者提出了多種描述兩相流的數學模型,主要分為Euler-Lagrange法和Euler-Euler法,前者較多地應用于分散流,后者用于求解連續相,更為普及。Euler-Euler法主要包括混合模型、歐拉模型和VOF模型共三種多相流模型[5]。在水利工程領域,丁偉業[6]等人利用VOF耦合非線性k-ε模型模擬了三維潰壩數水流,李然[7]等人應用VOF方法對明渠氣液兩相流水氣界面進行了計算,并取得了較好的效果。
國內已建和在建升魚機很少,尚未發現VOF方法在升魚機集誘魚系統上應用的案例[8]。升魚機集誘魚系統一般位于發電廠房尾水渠渠首,而發電尾水從尾水管進入尾水渠,過水斷面發生突變,渠首流態十分復雜;多臺發電機組不同發電組合時,加劇了集誘魚系統水流流態的復雜性。
升魚機集誘魚系統的水流條件是關系升魚機過魚效果的關鍵,傳統的物理模型模擬流場的方法耗費大、周期長,隨著計算機和數值模擬技術的發展,使得用基于VOF模型的數值方法進行升魚機集誘魚系統流場三維模擬成為現實。
海南省南渡江邁灣水利樞紐工程是南渡江干流中下游河段的一座控制性水利樞紐工程,也是國務院確定的172項節水供水重大水利工程之一,該工程擬采用升魚機過魚方案,過魚有國家Ⅱ級保護魚類花鰻鱺1種,其他珍稀魚類9種。
以該工程升魚機為背景,建立三維數值模型,采用VOF法分析和研究升魚機集誘魚系統的水流條件,檢驗其是否滿足集魚誘魚要求。
1 工程概況
邁灣水利樞紐位于海南省南渡江干流的中游河段,壩址位于澄邁與屯昌兩縣交界處。工程等別屬Ⅱ等,工程規模為大(二)型,開發任務為以防洪、供水、灌溉為主,兼顧發電,并為改善下游水生態環境和瓊北地區水系連通創造條件。工程正常蓄水位為108m,總庫容6.66億m3,電站裝機40MW,多年平均發電量6 485萬kW·h。
升魚機布置在壩后發電廠房右側,由誘魚系統、集魚系統、升魚系統三大部分組成,主要由進魚口、集魚槽、趕魚柵、集魚池浮箱、集魚斗、門機、運魚車、抗風扶架、壩頂塔式回轉吊等金屬結構支持運作,其中集誘魚系統設有3個誘魚口、1個集魚槽和1個補水管等。魚類在右岸尾水的吸引下進入1#~3#誘魚口,再進入集魚槽,利用趕魚柵將魚趕至集魚池浮箱和集魚斗,通過門機垂直提升集魚斗至廠區回轉平臺,再通過運魚車運輸集魚斗至右岸壩段下游,由塔式回轉吊進行二次提升,再轉運至壩前不受引水發電影響的水域放流,如此反復運行。升魚機從集魚到放魚單程運行時間約40min,共設2個集魚斗,循環作業,以提高升魚效率。
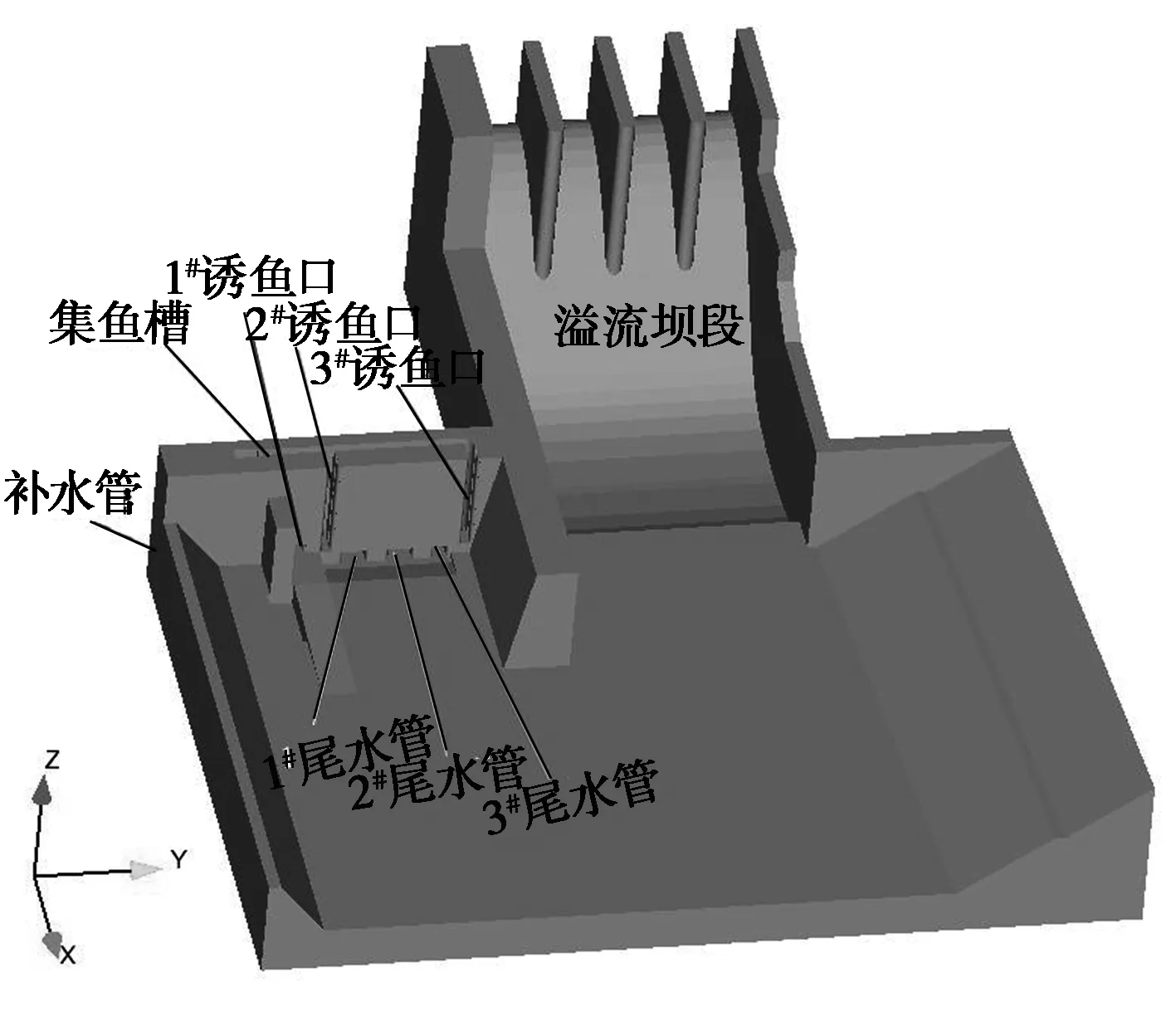
圖1 工程布置示意圖
其中,1#誘魚口為深孔進魚口,位于生態旁通管右側,進口前鋪筑碎石斜坡,便于引導花鰻鱺爬行進入;2#誘魚口位于電站廠房1#機組尾水管左側,為淺水魚類誘魚口;3#誘魚口位于3#機組尾水管和放空底孔右側閘墩之間,同樣為淺水魚類誘魚口。誘魚口和集魚槽的寬度均為2m,底高程均為53.00m。工程布置示意如圖1所示。
2 數學模型
2.1 基本方程
主要控制方程包括:
連續方程
(1)
動量方程
(2)
紊流模型采用RNGk-ε模型:
(3)
ε方程
(4)
式中,ρ—密度;μ—黏性系數;P—壓力;μt—紊流黏性系數,可以由紊動能k和紊動耗散率ε求出:
(5)

(6)
采用有限體積法對上述方程進行離散,時間和空間均采用二階精度格式,壓力速度耦合采用壓力隱式算子分割法PISO算法,在固壁上采用無滑移邊界條件,近壁區采用壁面函數法,采用VOF法進行自由表面的追蹤,應用SLIC方法進行兩相交界面的構造。
2.2 幾何重構原理
VOF方法對于追蹤氣液兩相流有較好的效果,也可應用于多種不相溶流體的界面追蹤。通過引入體積分數的概念,求解控制單元的體積分數值確定兩種或多種互不穿透流體的界面。即在計算域的每個控制單元都定義一個流體體積函數F,用F表示單元中某一流體占有的體積占該單元總可容納體積之比。若單元被該流體占滿,此時F值為1,相應空單元的F值為0,單元的F值在0與1之間時則為含有兩相交界面的單元體,這種單元通常是含有小尺度的氣泡,或與自由表面相接觸。
假設控制單元內第i相流體的體積分數用αi(0≤αi≤1)表示,則:
當αi=0時,控制單元內不存在第i相流體;
當αi=1時,控制單元內第i相流體占比達100%,充滿控制單元;
當0<αi<1時,第i相流體占有一定比例,控制單元內存在相間界面。
在任意一個控制單元中,各相流體所占的體積分數之和為1,即
(7)
模型中黏性系數、密度等流體的物理屬性參數統一采用基于體積分數權重的平均值方法。例如,密度的平均方法如下:
(8)
幾何重構是指根據控制單元中的體積分數值和梯度等,經過某種幾何關系運算來確定流體相間界面的位置和方向。SLIC方法是一種交替方向求解的兩相流界面構造方法,對于一維、二維和三維相間界面的構造都是適用的。SLIC方法的特點是將相間界面問題分成若干個簡單的一維問題處理,在其中每個維度中構造一個幾何平面,是流體相間界面根據局部情況進行重構的方法。每個維度的平面均由直線段組成,這些平面與坐標平面的關系均為垂直或平行。單個維度相間界面的構造是由控制單元的左右單元的體積分數確定的,能夠使用多維度分步推進法進行較為準確的時間推進,在流體表面重構中有較強的實用性。
3 基于VOF方法的流場分析
本工程升魚機集誘魚系統流道結構復雜,且水流受發電尾水影響,不同機組發電時,尾水位和尾水流態等均不同,相應集誘魚系統流速分布也有所不同。尾水位變化時,為保證集誘魚系統仍能誘魚、集魚,需要調控補水流量,并利用疊梁門控制誘魚口的過水斷面面積,使得誘魚口流速滿足魚類喜好流速,才能達到理想的誘魚效果。目標過魚種類多,而不同魚類的喜好流速存在較大的差異,要求1#誘魚口流速滿足花鰻鱺喜好,2#誘魚口和3#誘魚口流速滿足淺水魚類喜好。
以1#、2#、3#機組滿發工況為例,運用VOF方法對集誘魚系統的水力要素進行分析。
3.1 計算區域與網格劃分
根據工程設計方案,建立升魚機集誘魚系統及周邊構筑物三維模型,模型包含誘魚口、集魚槽、補水管、電站尾水管、溢流壩段、消力戽及岸坡等,整個模型長247.5m,寬211m,高73m,見圖2。在建立的三維模型基礎上,構造六面體結構化網格。集誘魚系統附近區域和發電尾水口附近區域結構尺寸小,流速分布情況復雜,紊動摻混強烈,同時也是本文研究的重點,因此對此處網格進行加密處理,網格尺度為0.1m;其他區域網格適當稀疏,網格尺寸過渡平緩,尺寸范圍在0.2~0.8m,模型網格單元共532萬個。
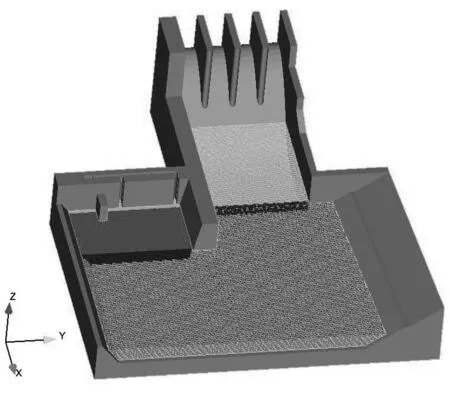
圖2 網格劃分
3.2 邊界條件
模型上游進口采用流速進口邊界,根據發電尾水流量和補水口流量換算成進口流速給定;下游出口采用壓強出口邊界,其總壓為大氣壓;上邊界采用壓強進口邊界,其總壓等于大氣壓;在固壁上采用無滑移邊界條件,固壁法向速度設為0。
此工況1#機組發電流量56.14m3/s,2#機組和3#機組發電流量均為46.17m3/s,下游水位為56.14m,集誘魚系統補水流量4.6m3/s,2#、3#誘魚口各設1塊高1m的疊梁門,此時疊梁門頂高程為54.00m。
3.3 計算成果與分析
經計算,尾水渠流速分布如圖3—4所示,主流出尾水管后偏右岸,尾水渠右岸形成順時針回流,尾水導墻下游形成逆時針回流。
集魚槽流速分布如圖5所示,集魚斗~1#誘魚口段斷面平均流速最大,1#誘魚口~2#誘魚口段次之,2#誘魚口~3#誘魚口段最小。集魚斗~1#誘魚口段水流相對紊亂,1#誘魚口~2#誘魚口段次之,2#誘魚口~3#誘魚口段均勻。
誘魚口流速分布如圖6—8所示。1#誘魚口主流偏向左側,流速分布不均;2#誘魚口主流先向左偏,后向右偏;3#誘魚口水流相對均勻。
1#、2#誘魚口外側水流向左偏轉,3#誘魚口外側流速較均勻,出水向右、向下擴散。
集誘魚系統流速范圍見表1。
該工況下各誘魚口、集誘槽段的流速基本包含設計流速區間,其中集魚槽1段的平均流速0.73m/s,略超出了設計流速0.7m/s,但該段流速區間0.21~1.13m/s與設計流速區間0.2~0.7m/s仍存在較大的交叉區間,魚通過誘魚口進入到集魚槽后,通過輔助的趕魚設施,基本可以滿足集魚要求。表明該發電組合下,誘魚口的疊梁門控制方案基本可行。
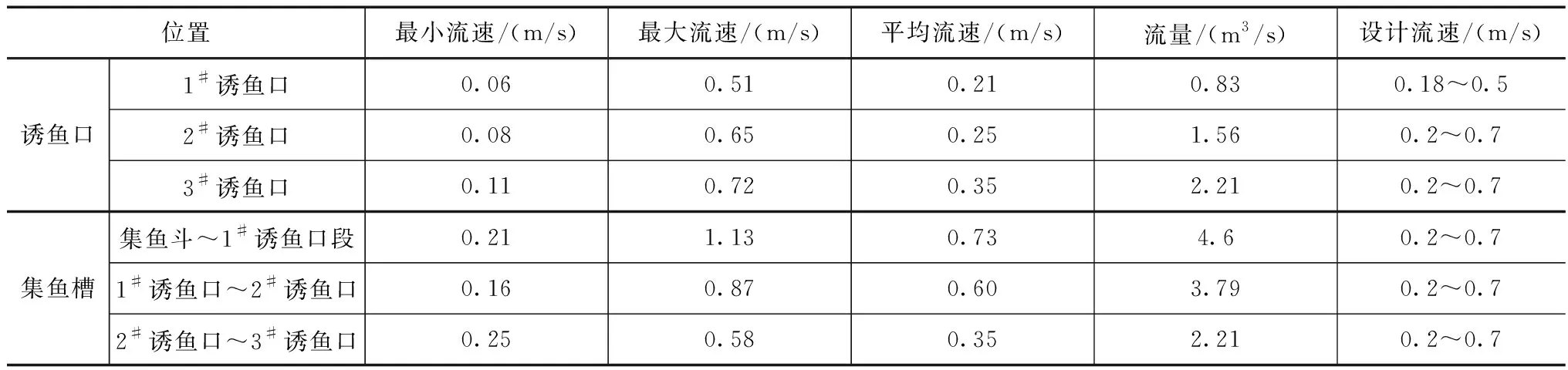
表1 集誘魚系統流速范圍
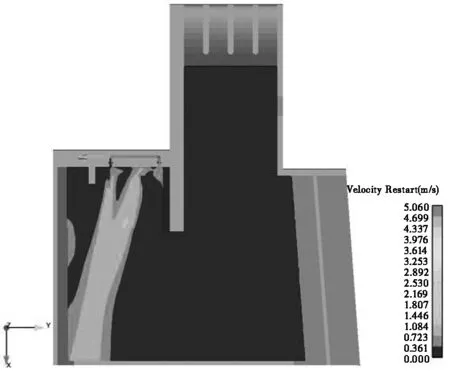
圖3 表面流速分布圖
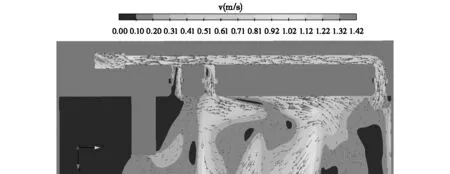
圖4 集誘魚系統流速平面分布圖(高程55.00m)
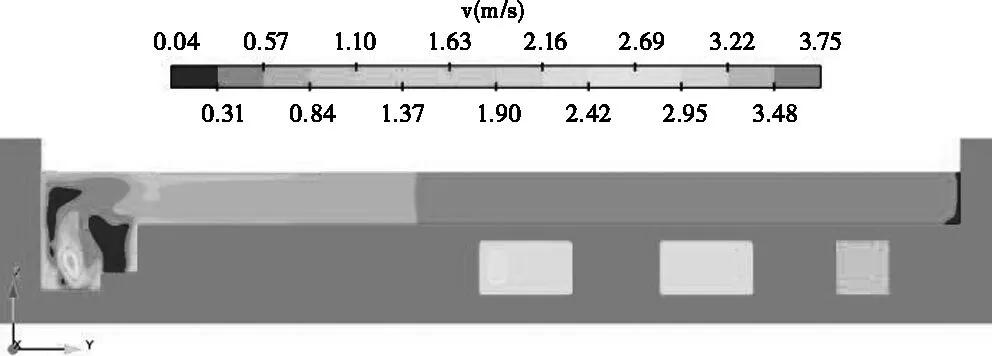
圖5 集魚槽縱剖面流速分布云圖
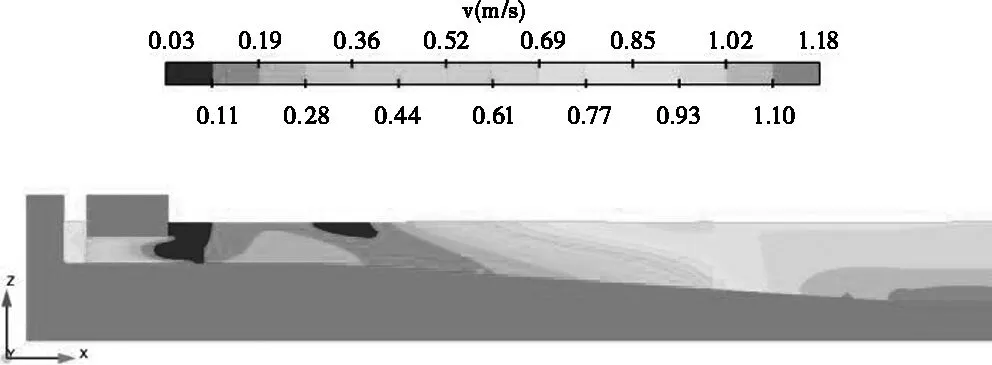
圖6 1#誘魚口縱剖面流速分布云圖

圖7 2#誘魚口縱剖面流速分布云圖
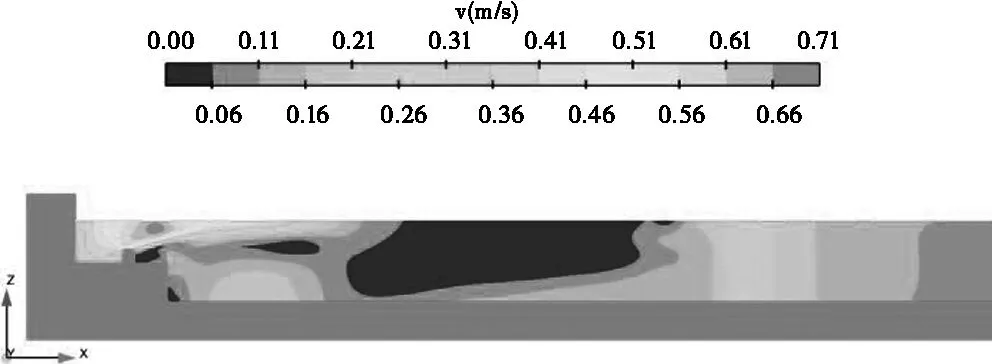
圖8 3#誘魚口縱剖面流速分布云圖
將VOF方法應用升魚機集誘魚系統的水力要素的研究中,模擬出的流速分布情況和水面線變化情況與物理規律基本一致,表明VOF方法對升魚機集誘魚系統有較好的適用性。
用相同方法,可對其他發電情況進行仿真分析,以確定不同發電情況下各誘魚口的疊梁門控制方案。
4 結論
通過運用VOF方法,建立三維數學模型,可對升魚機集誘魚系統的水流條件進行數值摸擬,得到相應的流速分布、水面線等重要結論,為升魚機集誘魚系統的設計、優化和管理提供參考和依據。
下階段將運用相同方法,結合模型模型實驗,研究各發電工況、不同補水流量和不同誘魚口疊梁門高度與升魚機集誘魚系統水力要素之間的關系,進一步研究并確定升魚機的調度制度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
當代陜西(2020年13期)2020-08-24 08:22:02
數學物理學報(2020年2期)2020-06-02 11:29:24
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
濰坊學院學報(2016年2期)2016-12-01 13:00:11
