艦載激光武器打擊目標外形提取方法
2019-01-14 03:39:10盧發興邢昌風
火力與指揮控制 2018年12期
彭 聰,盧發興,邢昌風
(海軍工程大學電子工程學院,武漢 430033)
0 引言
激光武器打擊目標時,發射激光束并持續照射目標上毀傷點,通過累積能量,造成目標毀傷。照射目標上不同部位,可造成不同程度的軟硬殺傷,影響打擊目標效果。不難發現,毀傷點的選取是其中關鍵。目前,目標毀傷點選取依靠人工在目標圖像上選點,具有一定的盲目性[1-4]。為有效應對來襲目標,武器系統應具有自動確定目標毀傷點的能力,則要求系統有選擇性地打擊目標上的點,進而系統需要知悉目標在空間中的整體結構,該信息可以由捕獲目標圖像提供。圖像信息包含目標外形、顏色等特征信息,其中外形特征與目標整體結構聯系緊密。因此,提取目標外形是實現系統自動確定毀傷點的基礎。通常,使用圖像分割的方法提取目標外形。
圖像分割方法適用于分離目標和背景,包括基于區域的圖像分割和基于邊緣的圖像分割。基于區域的分割方法,通過設定分割閾值,將圖像像素與閾值比較,依據比較結果進行前景(目標)和背景分類,包括直方圖門限法、區域生長法等[5-7]。基于邊緣的分割方法,又稱圖像邊緣檢測,利用圖像一階導數極大值或二階導數過零點信息來判斷目標邊緣點,包括 Sobel、LoG、Canny 算子等[8-10]。但是,基于區域的圖像分割結果并不十分準確,容易造成過度分割,即存在部分像素分類被混淆;圖像邊緣檢測結果較為準確,可是所得真實目標邊緣中包含有偽邊緣。
本文采用峰值查找和色差閾值法完成圖像各像素顏色聚類,得到顏色聚類圖像;使用Canny算子對顏色聚類圖像中目標進行邊緣檢測。依據上述目標外形提取方法,獲取圖像目標真實外形。目標外形提取能提供毀傷部位選擇相關的目標外形信息,保證激光武器有效射擊。
1 近似主色確定
由于受光照以及拍攝角度等影響,圖像目標區域各像素在值上存在差異,但大體接近。因此,可以考慮將值互相接近的像素歸于某一類主色中,即通過簡化構成圖像的色彩成分,對像素值重新賦值。首先,采用顏色分布直方圖對圖像色彩信息進行統計;然后,使用峰值查找算法確定近似主色。
1.1 顏色分布直方圖
彩色圖像由R、G、B 3個顏色通道組成,顏色通道間相互關聯。如果僅憑單一顏色通道的灰度值分布確定灰度閾值并對彩色圖像分割,則忽視了其余通道的灰度分布特點,造成分割不準確的結果。顏色分布圖用于統計彩色圖像3個顏色通道分量值頻率分布。
RGB空間中每一種顏色由三維向量(R,G,B)描述,分量R、G、B取值范圍為0~255且為整數。如圖1所示,所有顏色向量包含于RGB彩色立方體,立方體頂點對應不同的顏色[11]。
對RGB空間而言,共包含2563=16 777 216個向量。對圖像進行顏色統計時,若直接使用空間中所有向量進行顏色描述,則造成極大運算量。為方便統計,且不影響圖像原有顏色分布,對RGB空間進行降維處理,減少表示向量數目;然后,對顏色信息重新量化:
1)RGB空間降維:通常彩色圖像的每個顏色通道需要10~20個量化級別。將每個顏色通道原有的灰度級劃分為10個級別i(i=1,2,…,10),級別 i對應的灰度級區域為 Ni=[Nimin,Nimax],其中[]表示取整運算,則降維后的空間包含顏色向量103=1 000個。
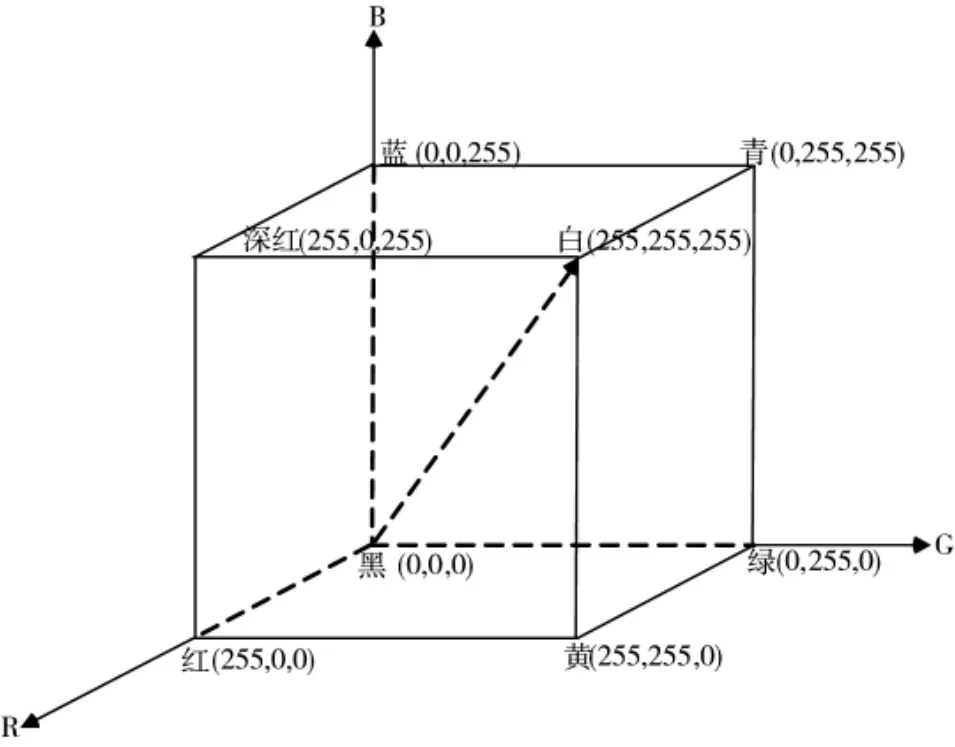
圖1 RGB彩色立方體
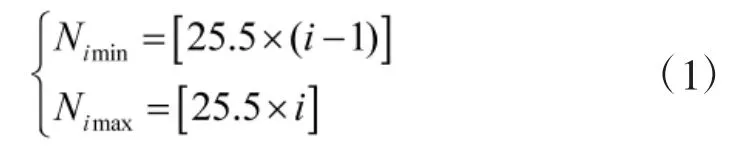
2)顏色信息量化:按照新的量化級別,對圖像像素點重新標志。像素顏色向量(R,G,B)量化后新向量為(iR,iG,iB),滿足如下關系

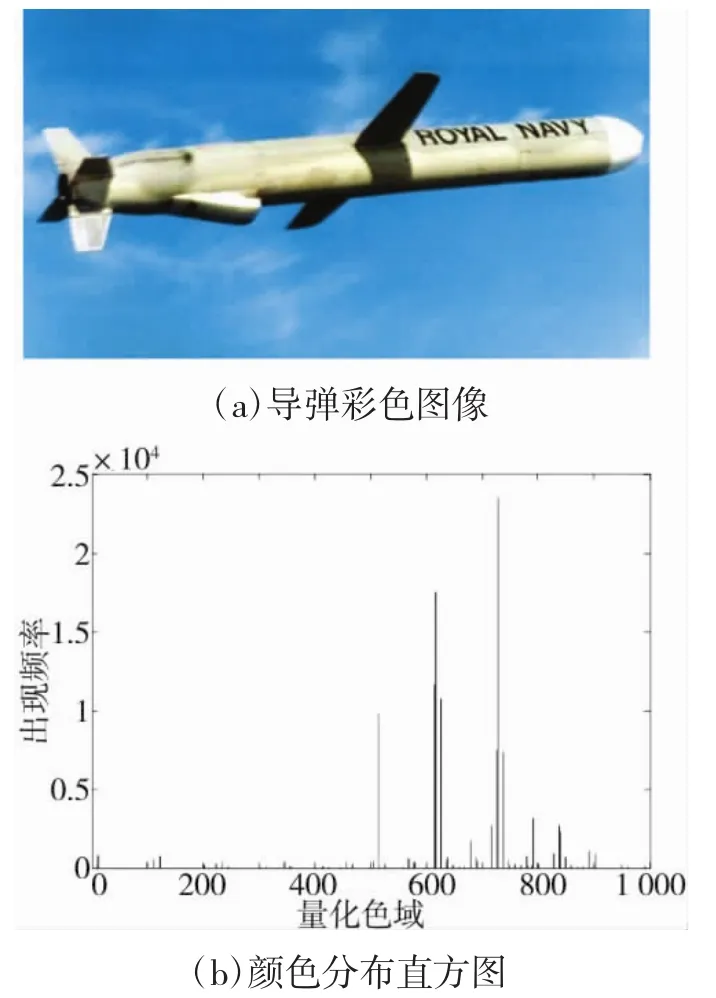
圖2 顏色信息量化圖
按照式(1)將圖2(a)每個顏色通道灰度級別劃分為10個等級,按照式(2)對圖2(a)中各像素初始顏色向量重新量化,即使用降維后得到的1 000種顏色向量替代初始向量。統計新的顏色向量在圖2(a)中的分布特征,結果如圖2(b)顏色分布直方圖所示。
圖2(b)中橫軸為量化色域,表示降維后的種顏色向量;縱軸為出現頻率,表示圖2(a)中各顏色向量的數目。
1.2 峰值查找
顏色分布直方圖完成了對圖像所有色彩信息的統計,不難發現直方圖中顏色向量頻率差異較大,存在明顯的峰值落差。峰值部分相關聯的像素在整幅圖像中占有絕大比例,確定圖像近似主色成分就是對顏色向量進一步篩選,保留能反映圖像顏色特征的部分向量[12-13]。
使用峰值查找算法,確定近似主色成分,步驟描述如下:
1)直方圖中所有峰值點構成點集P1,作為初始峰值點集:

其中,P0為顏色分布直方圖中包含的顏色向量集合,pi為單個顏色向量;h(pi)為顏色向量統計頻率。
2)點集中每個元素(pi,h(pi))同相鄰元素(pi-1,h(pi-1))和(pi+1,h(pi+1))進行比較,滿足以下條件則保留:

得到新點集Pi。
3)重復步驟2)直到滿足頻率閾值條件,則結束:
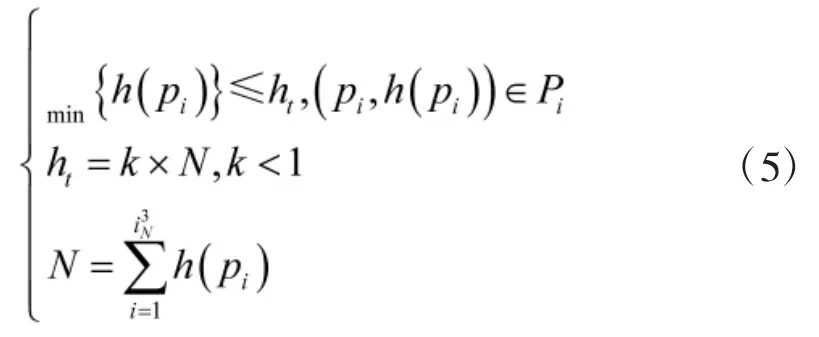
其中,ht為頻率閾值,k為閾值系數,N為像素點總數;iN為量化級別,表示顏色向量種數。
步驟3)結束所得點集即為近似主色成分,圖3為算法流程圖。
取閾值系數k=0.003,圖2(a)近似主色結果如圖4所示。圖中點表示峰值點,所得近似主色成分數目為30個。
2 顏色聚類
近似主色確定完畢后,依據顏色距離大小將圖中像素歸于某一類主色當中,即顏色聚類。顏色距離指色差大小,國際照明委員會(CIE)制定的CIE1976-L*a*b*規范是目前國際通用的色彩測量標準,可以精確地測量兩種顏色之間的色差。

圖3 峰值查找算法流程圖
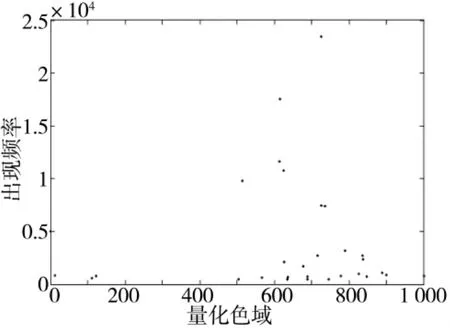
圖4 近似主色峰值點圖
2.1 顏色距離
CIE1976-L*a*b*均勻顏色空間是在RGB空間基礎之上,制定了CIEXYZ基色系統和CIE-L*a*b*均勻顏色空間新標準。CIEXYZ基色系統用XYZ空間色彩重新表征RGB顏色。CIE-L*a*b*均勻顏色空間中,L*為明度坐標,表征顏色亮度大小;a*b*為色品坐標系,表征顏色的色調和飽和度。
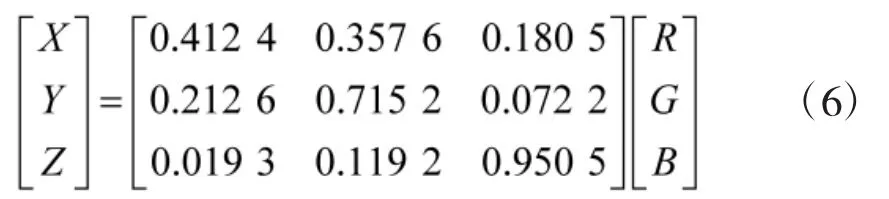
從RGB空間到CIEXYZ基色系統的近似轉換關系如下:
XYZ空間色彩對應的L*a*b*值計算如下:
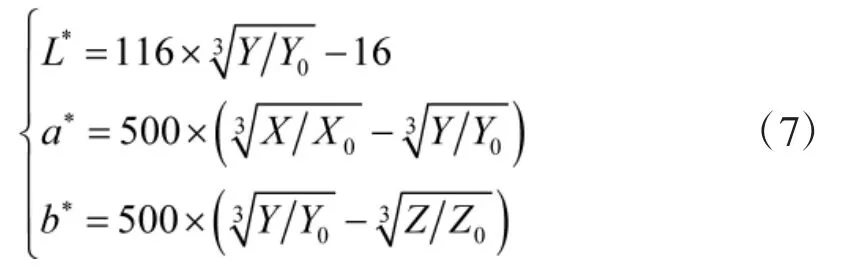
其中,X0=95.047、Y0=100.000、Z0=108.883 分別代表標準白板在D65光源下,視場中的三基色刺激值。
假定CIE-L*a*b*空間中,和分別代表像素xi和主色u對應的L*a*b*值,顏色距離計算如下:

其中,ΔL*為心理明度差,表示色彩亮度差異;Δa*和Δb*為心理色度差,表示色彩色相差異,其值為
2.2 顏色距離直方圖
顏色距離直方圖用于表征圖像像素與主色之間的距離分布。最大顏色距離記為,則像素顏色距離范圍為;顏色距離范圍 M 等分,第m 個顏色距離區間段,
其中,[]表示取整運算,m=1,2,…,M∈Z+。像素點按照顏色距離區間段歸類。主色u的顏色距離直方圖H(u)可表示為

其中,h(m)表示像素點歸于Lm的頻率。
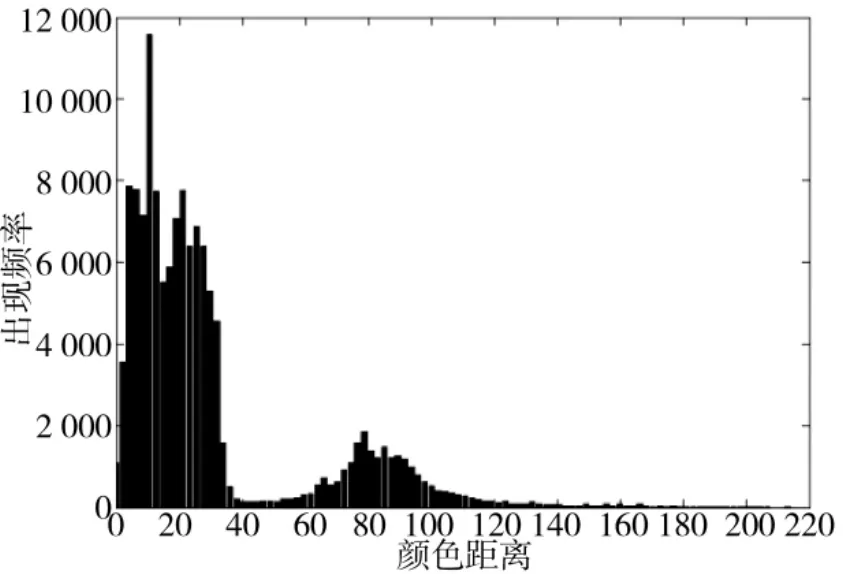
圖5 顏色距離直方圖
圖5為一種近似主色的顏色距離直方圖,橫坐標表示顏色距離,縱坐標表示顏色距離包含的像素點數目。結合顏色距離直方圖,采用色差閾值法,并對所有像素進行基于參考色的相似性分類。
色差閾值法基本步驟如下:
1)近似主色直方圖構成集合H:

2)對于近似主色ui,對應的色差閾值為。若,則Lm上像素點均歸于該主色集合滿足條件:
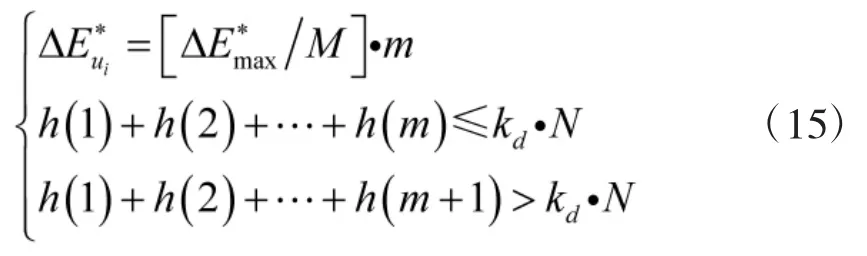
其中,[]表示取整運算,kd為色差閾值系數(0<kd<1),N 為像素總數。
3)重復步驟2),直到得到所有主色像素點集合


新主色點集即為像素點顏色聚類,下頁圖6為色差閾值法流程圖。
按照顏色聚類,將主色RGB值賦值給圖像像素RGB值,如下頁圖7所示。
3 目標外形提取
顏色聚類完畢后,對圖像中目標部分外形輪廓進行檢測,最終確定圖像目標可毀傷區域。Canny算法是一種最優邊緣檢測算法,采用高斯平滑模板對圖像濾波,計算濾波圖像灰度梯度值,使用雙閾值法跟蹤圖像邊緣,最終得到目標輪廓二值圖像。
Canny算法主要步驟如下:
1)高斯平滑
利用高斯濾波器對圖像進行濾波,濾波器是將高斯函數進行離散化得到的結果:

式(19)中k是濾波器維度,當k=3時,濾波器是一個 3×3 矩陣,Hi,j是該矩陣內第 i行第 j列元素(i,j=1,2,3)。使用該濾波器與圖像做卷積運算,完成高斯平滑。

圖6 色差閾值法流程圖
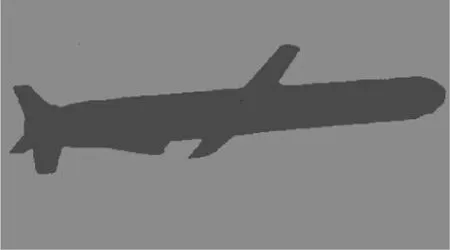
圖7 導彈顏色聚類圖像
2)計算灰度梯度大小
圖像相鄰像素灰度間存在差異,稱為灰度梯度,計算像素坐標(x,y)處灰度梯度大小:

3)非極大值抑制
尋找出準確的梯度方向,對每個像素點進行如下操作:
a)梯度方向假定一個方向,每個像素在鄰域內包含上下左右和45°角8個方向;
b)比較該像素點和梯度方向上的像素點梯度大小;
c)如果該像素點梯度強度最大則保留,否則抑制(剔除)。
經過非極大值抑制后圖像邊界會保留最亮的一條細線。
4)邊緣跟蹤
邊緣跟蹤的目的是保證邊緣結果是連續的閉合曲線,Canny算法使用滯后閾值,即設定一個高閾值和低閾值,當像素點梯度大于高閾值,則認為該像素必然是邊界;當像素點梯度小于低閾值時,則認為必然不是邊界。沿著步驟3)導出的梯度方向,開始跟蹤圖像整個邊緣,利用低閾值可以篩選曲線模糊部分像素點,直到跟蹤回到起點。
按照Canny算法步驟,對圖7和圖2(a)邊緣檢測,結果如圖8(a)和(b)所示。
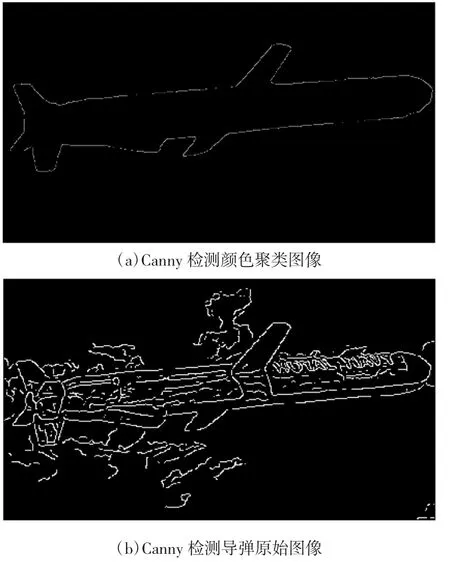
圖8 Canny算法邊緣檢測
圖8(a)中由像素值“1”所圍成的閉合區域即為目標區域。相比較于(b),經過顏色聚類方法處理后,極大減少了偽邊緣,同時比較完整地提取出了目標邊緣信息。
4 結論
激光武器毀傷目標外形提取有助于武器系統對目標可毀傷區域自動選取,保證武器有效射擊和提高作戰效率。文中通過顏色聚類和Canny邊緣檢測的方法,對目標外形提取且效果較好。下一步將基于目標外形,對目標可毀傷部位識別并確認毀傷區域,完整實現激光武器打擊目標時毀傷部位的選擇。