激光威脅下電視導(dǎo)引頭優(yōu)先跟蹤方式研究
2019-01-14 03:39:02朱戰(zhàn)飛韓新文楊樹濤郭恩澤
火力與指揮控制 2018年12期
關(guān)鍵詞:信號(hào)實(shí)驗(yàn)
朱戰(zhàn)飛,韓新文,楊樹濤,郭恩澤
(中國洛陽電子裝備試驗(yàn)中心,河南 洛陽 471000)
0 引言
電視制導(dǎo)工作在可見光波段,具有隱蔽性好、目標(biāo)識(shí)別度高、制導(dǎo)精度高、抗電磁干擾能力強(qiáng)等優(yōu)點(diǎn),這些優(yōu)點(diǎn)使電視制導(dǎo)武器在精確制導(dǎo)武器中占有重要地位,并表現(xiàn)出巨大的作戰(zhàn)潛力[1]。為應(yīng)對這種精確制導(dǎo)武器威脅,采用激光作為殺傷源對其導(dǎo)引頭進(jìn)行軟殺傷已成為一種極為實(shí)用、高效、普遍的對抗手段[2]。文獻(xiàn)[3-7]針對導(dǎo)引頭核心部件CCD光電探測器,開展了未加成像跟蹤系統(tǒng)條件下激光對CCD的作用機(jī)理、損傷現(xiàn)象及干擾效果等研究。在此基礎(chǔ)上,本文以某電視導(dǎo)引頭模擬器為實(shí)驗(yàn)對象,通過模擬打擊可見光合作目標(biāo),研究導(dǎo)引頭在不同跟蹤模式下激光的干擾效果,并給出不同功率激光信號(hào)威脅下導(dǎo)引頭跟蹤的優(yōu)先選擇方式。
1 電視導(dǎo)引頭工作原理
電視導(dǎo)引頭是以電視攝像機(jī)為傳感器的被動(dòng)制導(dǎo)系統(tǒng),跟蹤原理[8]框圖如下頁圖1所示。工作中,外界視場內(nèi)的目標(biāo)和背景(三維圖像)的光能,經(jīng)大氣傳輸進(jìn)入鏡頭聚焦,成像在攝像管靶面上(二維圖像)。因目標(biāo)和背景的光能反差不同,在靶面上形成不同的電位起伏,通過電子束的水平(行掃描)和垂直(場掃描)掃描將電位抹平,此時(shí)靶面輸出與抹平電位成比例的視頻信號(hào)電流(一維時(shí)間t的函數(shù))。如果把行、場掃描正程的中心作為零點(diǎn),那么由目標(biāo)形成的行、場視頻信號(hào)相對于行、場正程中心出現(xiàn)的時(shí)間,就可確定目標(biāo)水平位置偏差±Δx和俯仰位置偏差±Δy。測量位置偏差的任務(wù)由視頻跟蹤處理器中的誤差鑒別器自動(dòng)完成,鑒別器把測得相對掃描正程零點(diǎn)(也稱光軸)的位置偏差變成誤差電壓(或數(shù)字信號(hào))。該信號(hào)加于伺服系統(tǒng),經(jīng)多次負(fù)反饋控制,迅速地使電視導(dǎo)引頭的光軸對準(zhǔn)目標(biāo),進(jìn)而實(shí)現(xiàn)對目標(biāo)的跟蹤。
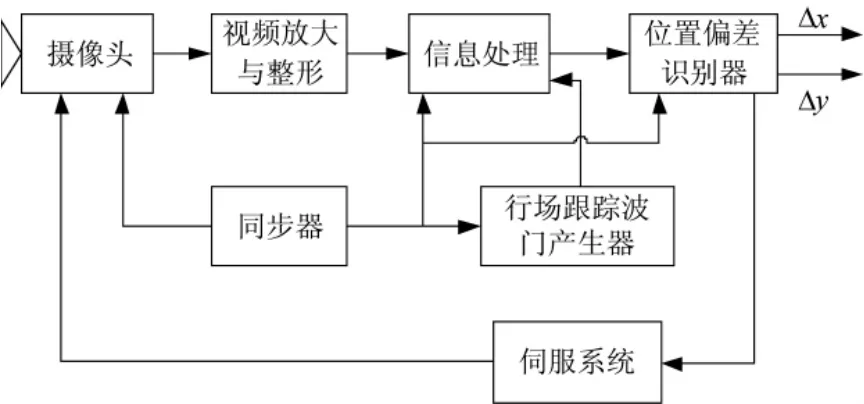
圖1 電視導(dǎo)引頭跟蹤原理框圖
2 實(shí)驗(yàn)方法
2.1 實(shí)驗(yàn)系統(tǒng)組成
參試設(shè)備主要包括:某電視導(dǎo)引頭模擬器1套、某激光信號(hào)發(fā)射器1臺(tái)、可見光合作目標(biāo)1套、紅外信標(biāo)源1臺(tái)。
其中:電視導(dǎo)引頭模擬器(以下簡稱導(dǎo)引頭)由電視攝像分系統(tǒng)、圖像處理分系統(tǒng)、計(jì)算機(jī)與操控分系統(tǒng)、伺服及穩(wěn)像平臺(tái)等部分組成,CCD的靶面尺寸為4.8 mm×3.6 mm,變焦范圍為15 mm~150 mm,跟蹤模式包括點(diǎn)跟蹤、質(zhì)心跟蹤、相關(guān)跟蹤和自適應(yīng)跟蹤等,考慮到當(dāng)前導(dǎo)彈成像制導(dǎo)系統(tǒng)中主要采用質(zhì)心跟蹤、相關(guān)跟蹤兩種模式[9],并結(jié)合合作目標(biāo)的特點(diǎn)及所處環(huán)境,實(shí)驗(yàn)中導(dǎo)引頭跟蹤模式確定為質(zhì)心跟蹤與相關(guān)跟蹤。導(dǎo)引頭在工作過程中,視頻顯示界面如圖2所示,圖中跟蹤模式代號(hào)中:03代表質(zhì)心跟蹤,05代表相關(guān)跟蹤。
激光信號(hào)發(fā)射器為半導(dǎo)體激光器,波長范圍為0.7 μm~0.95 μm,束散角為 0.64 mrad,功率為低高兩檔:1 W、200 W。
可見光合作目標(biāo)作為導(dǎo)引頭的模擬打擊目標(biāo),尺寸為10 m×6 m×6 m。
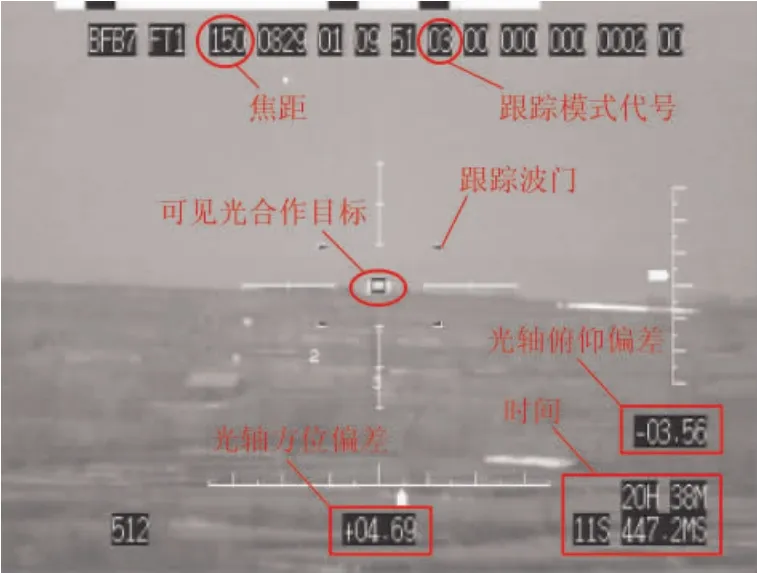
圖2 電視導(dǎo)引頭模擬器圖像顯示界面
紅外信標(biāo)源主要生成波長為3 μm~5 μm的紅外信號(hào),模擬導(dǎo)彈尾焰的紅外輻射特征。
2.2 實(shí)驗(yàn)布局設(shè)計(jì)
導(dǎo)引頭采取高點(diǎn)配置,對準(zhǔn)可見光合作目標(biāo)方向;紅外信標(biāo)源配置在導(dǎo)引頭附近,用于引導(dǎo)或指示激光信號(hào)發(fā)射器準(zhǔn)確瞄準(zhǔn)導(dǎo)引頭。
激光信號(hào)發(fā)射器與可見光合作目標(biāo)采取低處配置,其中激光信號(hào)發(fā)射器距離導(dǎo)引頭約10 km,可見光合作目標(biāo)距離激光信號(hào)發(fā)射器約55 m,激光信號(hào)發(fā)射器、可見光合作目標(biāo)與導(dǎo)引頭保持通視狀態(tài)。實(shí)驗(yàn)布局如圖3所示。
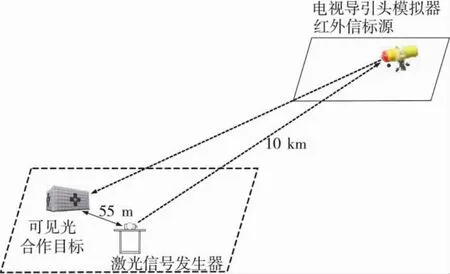
圖3 激光干擾電視導(dǎo)引頭模擬器實(shí)驗(yàn)布局圖
3 實(shí)驗(yàn)現(xiàn)象及結(jié)果分析
3.1 低功率激光干擾實(shí)驗(yàn)
3.1.1 質(zhì)心跟蹤模式下激光干擾
1)在焦距為90 mm的情況下,導(dǎo)引頭采用質(zhì)心跟蹤模式鎖定目標(biāo),而后激光信號(hào)發(fā)生器對準(zhǔn)導(dǎo)引頭方向發(fā)射1 W激光干擾信號(hào)。實(shí)驗(yàn)結(jié)果:受到激光干擾后,導(dǎo)引頭光軸的方位、俯仰偏差發(fā)生較大變化,目標(biāo)丟失、干擾有效,如下頁圖4所示。
2)導(dǎo)引頭同樣采用質(zhì)心跟蹤模式,焦距從90mm增大至150 mm,鎖定目標(biāo)后激光信號(hào)發(fā)生器對準(zhǔn)導(dǎo)引頭方向發(fā)射1 W激光干擾信號(hào)。實(shí)驗(yàn)結(jié)果:導(dǎo)引頭保持穩(wěn)定跟蹤目標(biāo)、干擾無效,如下頁圖5所示。
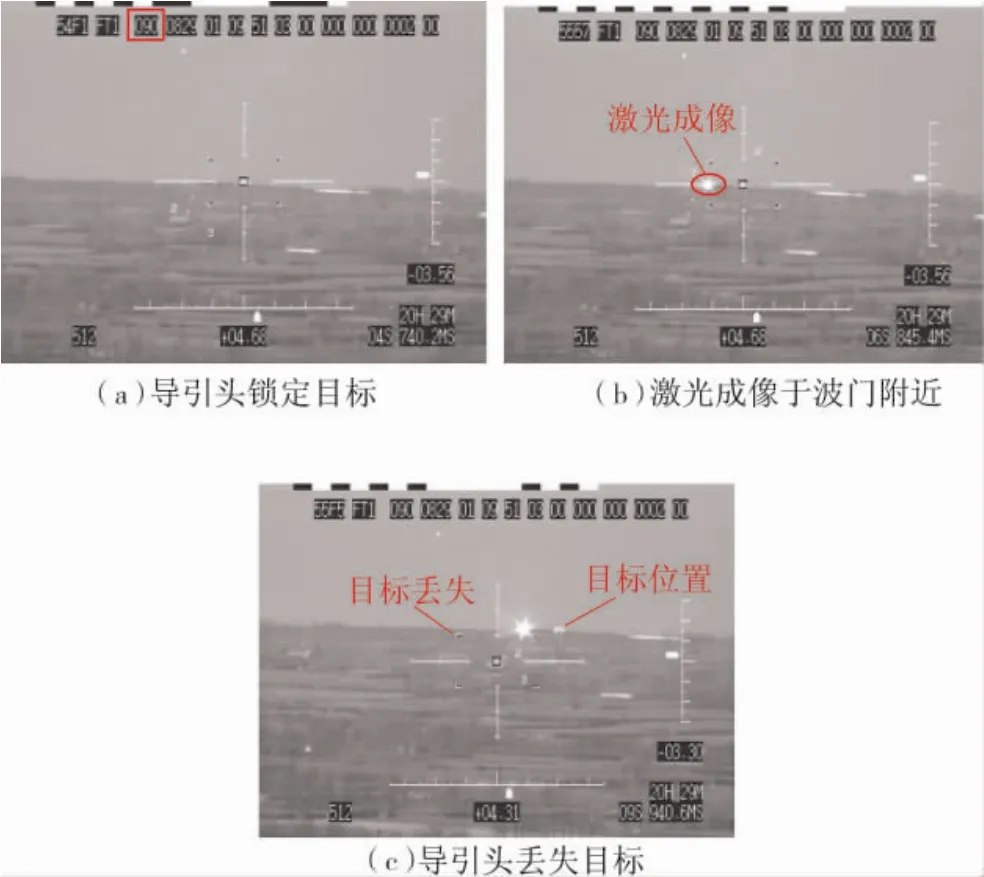
圖4 焦距為90 mm時(shí)質(zhì)心跟蹤模式下導(dǎo)引頭工作畫面
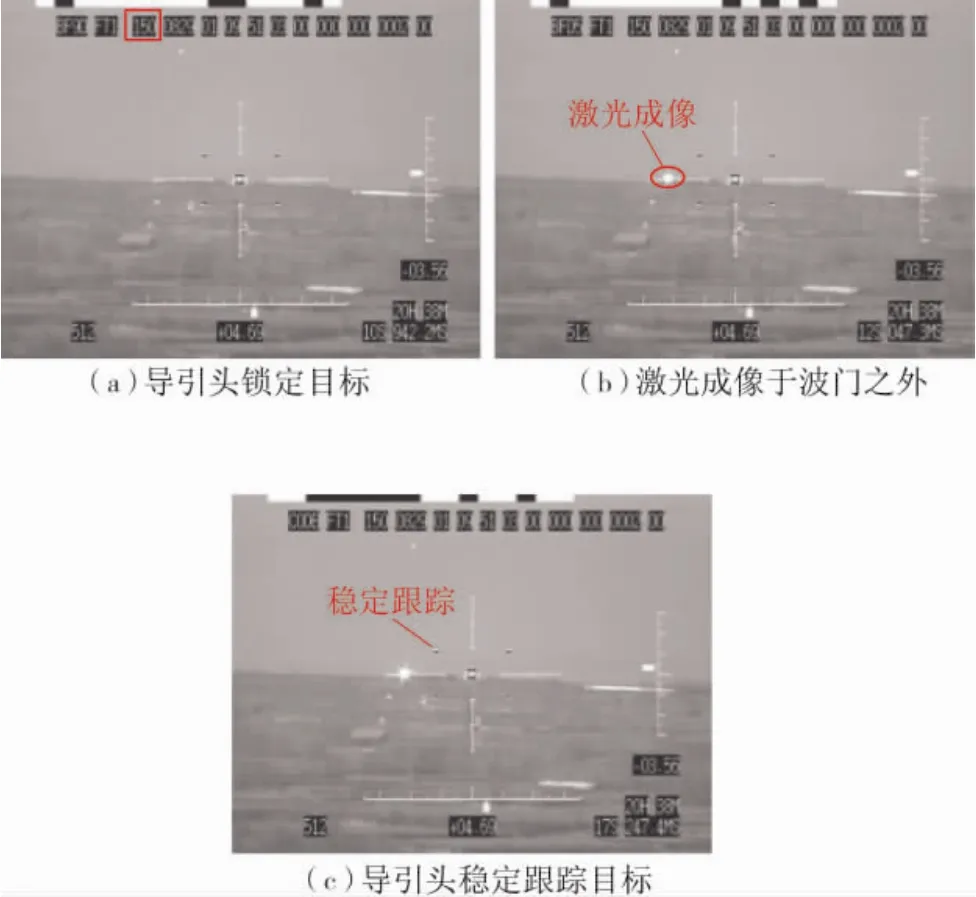
圖5 焦距為150 mm時(shí)質(zhì)心跟蹤模式下導(dǎo)引頭工作畫面
原因分析:質(zhì)心跟蹤采用的是利用目標(biāo)和背景的對比度來識(shí)別和提取目標(biāo)信號(hào)的對比度跟蹤算法,主要通過計(jì)算波門內(nèi)目標(biāo)的質(zhì)心(xc,yc)來獲取跟蹤點(diǎn),其中,。跟蹤過程中,圖像處理系統(tǒng)只對波門內(nèi)的視頻信號(hào)進(jìn)行處理,并通過波門套住目標(biāo)圖像。由圖4、圖5可知,當(dāng)焦距為90 mm時(shí),干擾激光在導(dǎo)引頭CCD探測器的成像位于波門附近,且亮度高于目標(biāo)亮度,此時(shí)干擾激光的成像將和波門內(nèi)的目標(biāo)圖像一起參與質(zhì)心運(yùn)算,從而使質(zhì)心偏離原來的跟蹤點(diǎn),造成導(dǎo)引頭目標(biāo)丟失。而當(dāng)焦距增大至150 mm時(shí),導(dǎo)引頭視場隨之減小,此時(shí)干擾激光的成像處于波門之外,圖像處理系統(tǒng)不對其進(jìn)行信號(hào)處理,因而導(dǎo)引頭能夠繼續(xù)穩(wěn)定跟蹤目標(biāo)。
3.1.2 相關(guān)跟蹤模式下激光干擾
1)焦距為90 mm時(shí),由圖4可知,在質(zhì)心跟蹤模式下,導(dǎo)引頭受到1 W激光信號(hào)干擾后丟失目標(biāo)。現(xiàn)變換跟蹤模式為相關(guān)跟蹤,并保持焦距等其他因素不變,鎖定目標(biāo)后發(fā)射激光干擾信號(hào)。實(shí)驗(yàn)結(jié)果:導(dǎo)引頭保持穩(wěn)定跟蹤目標(biāo)、干擾無效,如圖6所示。

圖6 焦距為90 mm時(shí)相關(guān)跟蹤模式下導(dǎo)引頭工作畫面
原因分析:相關(guān)跟蹤采用的是以圖像匹配為基礎(chǔ)的相關(guān)跟蹤算法,主要通過尋找最佳匹配位置(u*,v*)來獲取跟蹤點(diǎn),其中。跟蹤過程中,圖像處理系統(tǒng)將波門內(nèi)的電視圖像存儲(chǔ)為目標(biāo)模板,不斷將目標(biāo)模板與實(shí)時(shí)圖像中各子區(qū)域進(jìn)行匹配計(jì)算,并將最佳匹配位置作為目標(biāo)的當(dāng)前位置進(jìn)行跟蹤。由圖6可知,激光干擾信號(hào)發(fā)出后,雖然激光的成像同樣位于波門附近,但由于成像光斑較小,對匹配計(jì)算過程中誤差評(píng)價(jià)函數(shù)的極值位置影響不大,難以影響對最佳匹配位置的判斷,因而導(dǎo)引頭能夠繼續(xù)穩(wěn)定跟蹤目標(biāo)。
2)焦距為150 mm時(shí),由圖5可知,激光成像將位于波門之外,根據(jù)相關(guān)跟蹤算法的特點(diǎn),可以推斷:焦距為150 mm時(shí),保持其他因素不變,在相關(guān)跟蹤模式下導(dǎo)引頭鎖定目標(biāo),在受到1 W激光信號(hào)干擾后,導(dǎo)引頭將保持對目標(biāo)的穩(wěn)定跟蹤。實(shí)驗(yàn)結(jié)論也證實(shí)了這一推斷,在此不再贅述。
3.2 高功率激光干擾實(shí)驗(yàn)
3.2.1 質(zhì)心跟蹤模式下激光干擾
在焦距為133 mm的情況下,導(dǎo)引頭采用質(zhì)心跟蹤模式鎖定目標(biāo),而后激光信號(hào)發(fā)生器對準(zhǔn)導(dǎo)引頭方向發(fā)射200 W激光干擾信號(hào)。實(shí)驗(yàn)結(jié)果:激光信號(hào)發(fā)出到達(dá)導(dǎo)引頭后,約0.1 s導(dǎo)引頭丟失目標(biāo),如圖7所示。
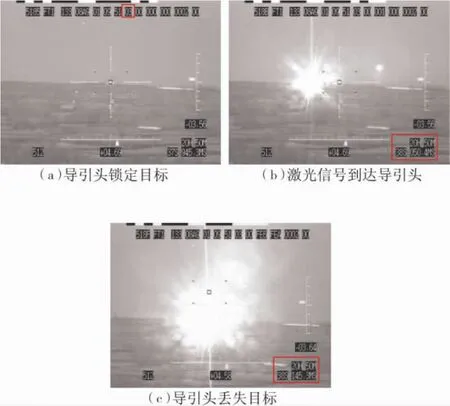
圖7 質(zhì)心跟蹤模式下受到200 W激光信號(hào)干擾時(shí)導(dǎo)引頭工作畫面
3.2.2 相關(guān)跟蹤模式下激光干擾
在焦距為133 mm的情況下,導(dǎo)引頭采用相關(guān)跟蹤模式鎖定目標(biāo),而后激光信號(hào)發(fā)生器對準(zhǔn)導(dǎo)引頭方向發(fā)射200 W激光干擾信號(hào)。實(shí)驗(yàn)結(jié)果:激光信號(hào)發(fā)出到達(dá)導(dǎo)引頭后,約1.2 s導(dǎo)引頭目標(biāo)丟失,相比質(zhì)心跟蹤響應(yīng)時(shí)間延后了約1.1 s,如圖8所示。
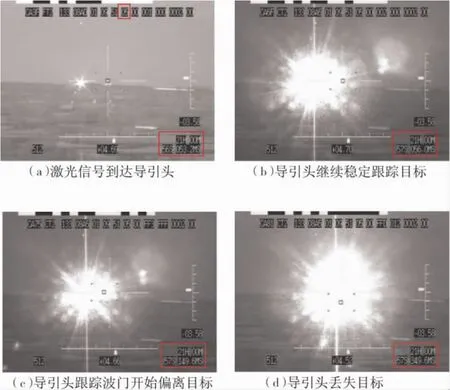
圖8 相關(guān)跟蹤模式下受到200 W激光信號(hào)干擾時(shí)導(dǎo)引頭工作畫面
原因分析:由圖7、圖8可知,焦距為133 mm時(shí),干擾激光到達(dá)導(dǎo)引頭在CCD探測器上的初始成像位于波門之外,但與1 W激光的干擾效果不同,200 W的激光信號(hào)對CCD探測器造成了飽和并產(chǎn)生了飽和串音現(xiàn)象。在質(zhì)心跟蹤模式下,當(dāng)串音后的干擾圖像進(jìn)入跟蹤波門后,便與波門內(nèi)的目標(biāo)圖像一起參與質(zhì)心運(yùn)算,使質(zhì)心位置偏離原來的跟蹤點(diǎn),因而造成導(dǎo)引頭目標(biāo)的隨即丟失。而在相關(guān)跟蹤模式下,當(dāng)串音后的干擾圖像進(jìn)入跟蹤波門后,并未造成導(dǎo)引頭目標(biāo)的隨即丟失;而是隨著干擾圖像對誤差評(píng)價(jià)函數(shù)在匹配計(jì)算過程中極值位置造成的偏差逐漸增大,使最佳匹配位置逐步遠(yuǎn)離目標(biāo)點(diǎn),從而導(dǎo)致導(dǎo)引頭跟蹤波門逐步偏離目標(biāo),并最終丟失,也正是因?yàn)檫@一過程,才使得相同條件下相關(guān)跟蹤對激光干擾信號(hào)的響應(yīng)時(shí)間比質(zhì)心跟蹤延后了約1.1 s。
當(dāng)導(dǎo)引頭在其他焦距鎖定目標(biāo),受到200 W激光信號(hào)干擾后,由于激光對CCD探測器造成了光飽和串音現(xiàn)象,上述實(shí)驗(yàn)結(jié)果基本不變,在此不再贅述。
4 結(jié)論
當(dāng)電視制導(dǎo)武器用于攻擊地面靜止目標(biāo)時(shí),在小功率(未能對CCD探測器造成飽和效應(yīng))激光干擾威脅下,應(yīng)優(yōu)先選用相關(guān)跟蹤模式,若因其他原因采取質(zhì)心跟蹤模式時(shí),應(yīng)在保證目標(biāo)圖像未充滿CCD靶面的前提下,盡可能使用長焦距跟蹤目標(biāo),使激光成像位于波門之外甚至視場之外,從而保證導(dǎo)引頭對目標(biāo)的穩(wěn)定跟蹤;在較大功率(能夠?qū)CD探測器造成飽和效應(yīng))激光干擾威脅下,同樣應(yīng)優(yōu)先選用相關(guān)跟蹤模式,一定程度上延長導(dǎo)引頭對激光干擾信號(hào)的響應(yīng)時(shí)間,并利用制導(dǎo)武器的飛行慣性,相對減小彈著點(diǎn)與打擊目標(biāo)之間的距離。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00