基于協同攻擊區模型的多機最優攻擊占位決策*
2019-01-14 03:38:26董海霞王永庭
火力與指揮控制 2018年12期
董海霞,鄒 杰,王永庭
(1.中國航空工業集團公司洛陽電光設備研究所,河南 洛陽 471000;2.光電控制技術重點實驗室,河南 洛陽 471000)
0 引言
空空導彈的攻擊區,是指目標附近的這樣一個空間區域:當載機在此空域內發射導彈時,導彈就能以不低于某一給定的概率殺傷目標[1]。攻擊區能為空戰中載機的攻擊占位提供指導,是航空火力控制系統的研究重點。但通常載機的武器和探測設備性能不匹配,易造成攻擊區損失。隨著信息網絡技術的發展,多機協同成為未來空戰的主流作戰方式[2-3]。近年來,國內外對能為載機提供更多攻擊優勢的協同攻擊區理論和建模方法展開了研究。
文獻[4]提出一種武器協調發射與網絡制導方法;文獻[5-6]研究了雙機協同空空導彈攻擊區;文獻[7]對協同制導條件下的空空導彈攻擊區解算方法進行研究,提出了導彈協同發射決策算法;文獻[8]介紹了一種基于信息共享的機動目標協同跟蹤與攔截策略;文獻[9]對無人機研究了協同作戰時的信息共享問題。但目前研究的協同攻擊區實質上還是單機的攻擊區:由占據探測優勢位置的載機,為占據攻擊優勢位置的載機提供更多目標探測信息,使得攻擊載機的導彈攻擊區得以擴大。
本文研究多架協同機的攻擊區合成問題,設計多機協同目標機動攻擊區模型,為多機協同作戰環境中載機的最優攻擊占位決策提供新方法。
1 協同目標機動攻擊區概念
在信息共享機制下,多架協同機可以同時參與導彈發射任務。通過合適的占位,使多架協同機攻擊區合成后的協同攻擊區,對目標形成不可逃逸攻擊態勢。再根據目標實際逃逸情況選取導彈發射機,可極大地提高目標命中率。
通過分析機動目標的各種逃逸策略,可認為目標的通用逃逸策略是先機動形成一定的轉彎角,當航向滿足要求時,目標以當前速度勻速水平直線飛行[10]。據此提出一種適用于多機協同作戰環境的基于目標轉彎角的目標機動攻擊區概念。
目標機動攻擊區是指,載機在當前位置發射導彈,能夠順利命中當前態勢下目標的目標允許轉彎角范圍。顯然,載機和目標態勢不同,獲得的目標機動攻擊區也不同。用目標機動攻擊區包線表示當前態勢下目標不同轉彎角對應的載機最大允許攻擊距離,示意如圖1所示。

圖1 目標機動攻擊區示意圖
載機在當前距離發射導彈能夠命中目標的目標允許轉彎角度范圍稱為θallow,在圖示態勢下,θallow為載機所在的紅色標記線范圍。從攻擊區包線上可以獲得,載機相對目標距離與目標允許轉彎角θallow之間的關系。若目標轉彎角度在θallow內,則載機在當前位置發射的導彈能順利命中目標;反之,目標的轉彎角度超過θallow范圍,則載機在當前位置發射的導彈不能順利命中目標。
協同目標機動攻擊區是指,多架載機相對同一目標占位,協同機群能夠順利命中目標的目標允許轉彎角范圍。協同目標機動攻擊區的目標允許轉彎角范圍,應為所有協同機目標允許轉彎角范圍的合成。兩架載機的目標機動攻擊區及組成的協同目標機動攻擊區如圖2所示。
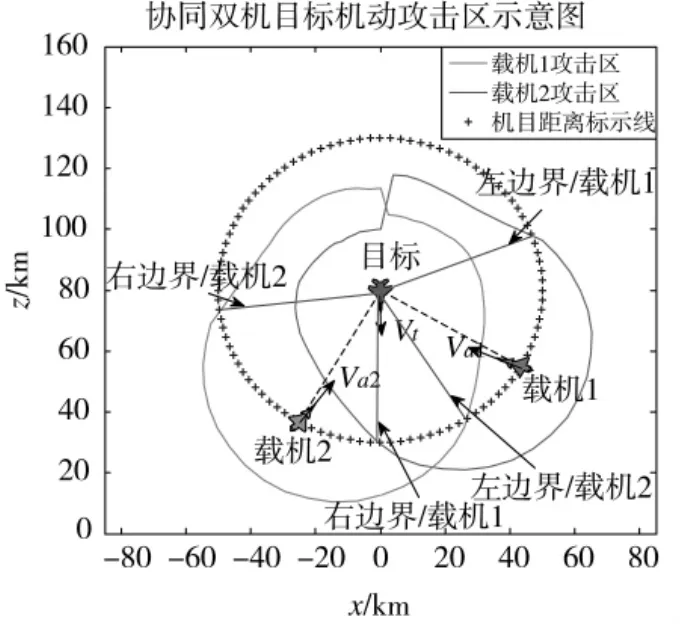
圖2 雙機協同目標機動攻擊區示意圖
載機1的目標允許轉彎角范圍為標識線“左邊界/載機1”和“右邊界/載機1”組成的載機1所在區域;載機2的目標允許轉彎角范圍為標識線“左邊界/載機2”和“右邊界/載機2”組成的載機2所在區域;雙機協同的目標允許轉彎角范圍為標識線“左邊界/載機1”和“右邊界/載機2”標識線組成的載機1,2所在區域。可以看出,協同目標機動攻擊區相比單機攻擊區,目標允許轉彎角范圍明顯增大。
2 協同目標機動攻擊區建模
目標在發現威脅后開始轉彎逃逸機動,可設置目標的運動方式為:在載機導彈發射時刻開始機動轉彎,當實現一定轉彎角后轉為勻速直線運動。對某態勢確定的目標,載機能命中目標的目標允許轉彎角范圍θallow與載機速度Va,載機高度Ha,進入角q,離軸角εφ和載機相對目標距離Rat有關,可表示成式(1):

其中,進入角q是指目標速矢和機目瞄準矢量反向的夾角,左側為正;離軸角εφ是載機速矢和機目瞄準矢量之間的夾角,左側為正。載機目標相對態勢如圖3所示。
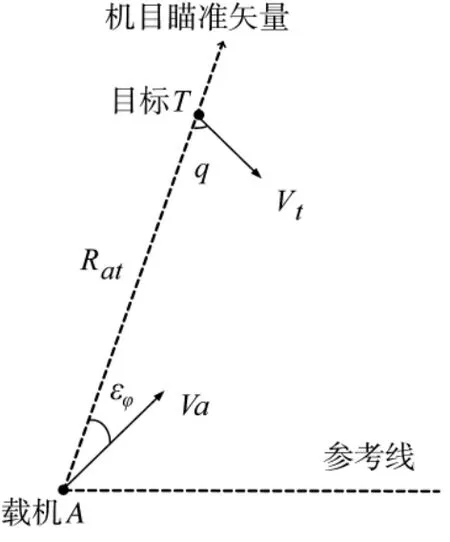
圖3 載機目標相對態勢圖
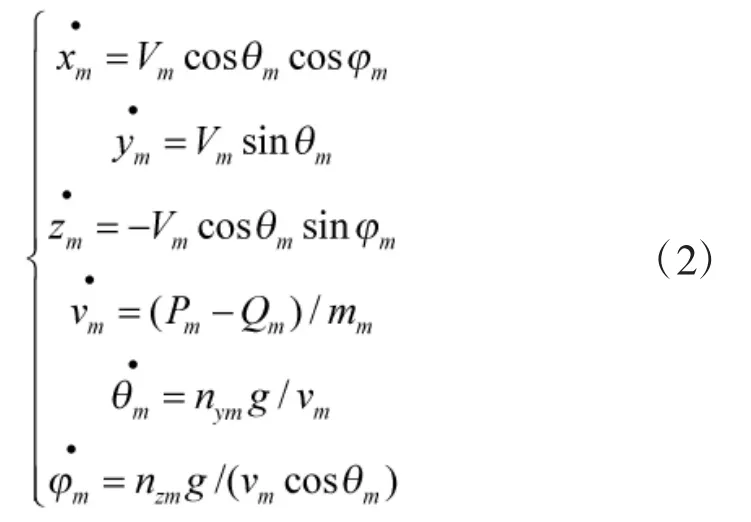
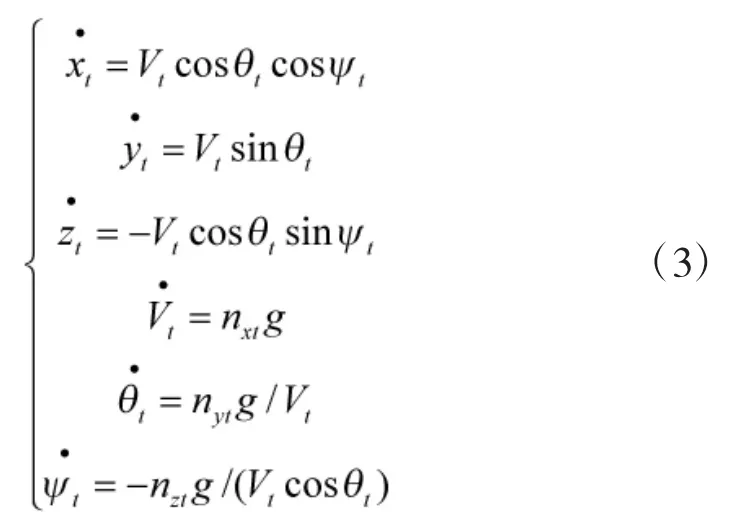
載機攜帶某型中遠距空空導彈。將導彈看作運動質點,在發射時刻導彈運動方程組可描述為式(2):
目標的運動方程組可表示為式(3):
根據上述模型,可以解算出任意目標轉彎角下載機在當前態勢能命中目標的最大允許相對距離,獲得目標機動攻擊區包線。相應地,就可以確定載機在當前距離處的目標最大允許轉彎角范圍θallow。
多架載機的協同目標機動攻擊區,要綜合所有協同機在當前態勢下對目標的機動攻擊區確定。有N架協同機,每架協同機在當前態勢下發射導彈命中目標的目標允許轉彎角范圍記為,協同目標允許轉彎角范圍θallow,Cor為所有單機的目標允許轉彎角θallow,i的并集。可表示為式(4):

協同機態勢的組合不同,獲得的協同攻擊區也不同。當協同目標允許轉彎角時,不論目標以多大轉彎角機動,都處在協同機的攻擊范圍內,即目標不可逃逸。下面設計協同目標機動攻擊區評價指標,分析協同機的最優占位決策。
3 多機最優協同攻擊占位決策
3.1 最優協同攻擊區評價指標
經過理論分析,當其他態勢確定時,載機相對目標距離Rat越大,目標的允許轉彎角范圍θallow越小,呈負相關關系。可以建立以下兩種評價指標搜尋最優協同攻擊區。
1)協同機相對目標距離Rat設為常值,改變其他態勢參數,能使協同目標允許轉彎角范圍θallow,Cor最大者為最優,即目標命中率最大,如式(5):


3.2 協同攻擊區占位優勢分析
載機對目標的高度、速度和角度占位對導彈的射程均有著重要影響[11-12]。要獲得多機最優協同攻擊占位決策,首先要分析占位態勢中各因素對協同攻擊區的影響,尋找使評價指標最優的協同攻擊區。以雙機協同為例,以目標不可逃逸距離最大J2為評價指標,用控制參量法分析載機目標相對高度、相對速度、相對角度占位對協同攻擊區的影響。
3.2.1 高度占位優勢
設置目標的馬赫數Mat=1.1,高度Ht=12 km;協同機馬赫數Mat=1.1,進入角對分析高度占位優勢影響不大,設雙機相對目標對稱占位,進入角分別為q1=-10°,q2=10°。任意轉彎角下目標不可逃逸距離隨載機目標相對高度δH(=Ha-Ht)的變化曲線如圖4所示。
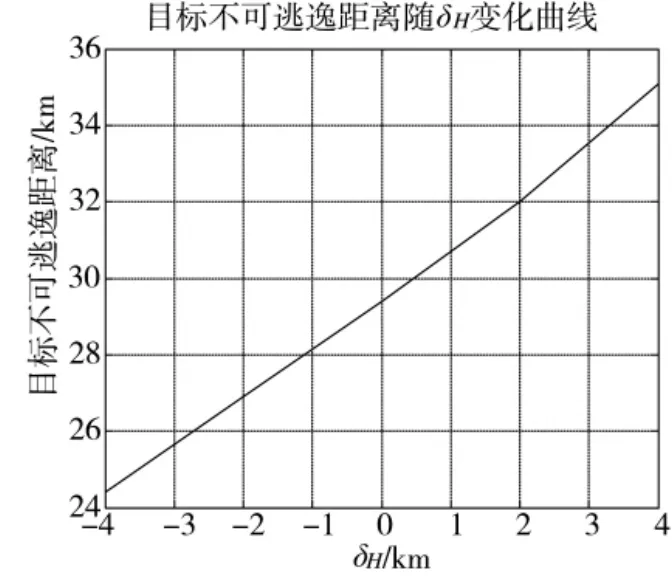
圖4 目標不可逃逸距離隨載機目標相對高度變化圖
隨著載機目標相對高度的增大,目標不可逃逸距離呈正比例增大。高度占位對空戰優勢影響很大,我機高度越高,目標不可逃逸距離越大,我機就能更早進入導彈發射條件。
3.2.2 速度占位優勢
設置目標的馬赫數Mat=1.1,高度Ht=12 km;協同機高度Ha=12 km,雙機相對目標對稱占位,進入角分別為q1=-10°,q2=10°。任意轉彎角下目標不可逃逸距離隨載機目標相對速度的變化曲線如圖5所示。
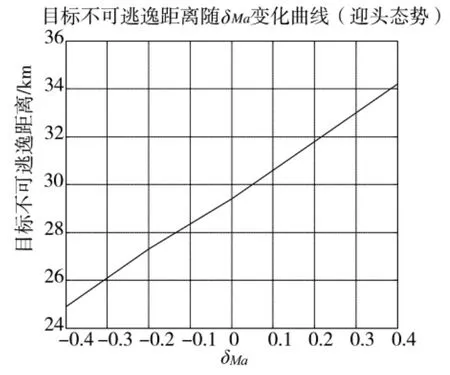
圖5 目標不可逃逸距離隨載機目標相對速度變化圖
隨著載機目標相對速度的增加,目標不可逃逸距離呈正比例增大。速度占位對空戰優勢影響很大,我機速度越大,目標不可逃逸距離越大,我機就能更早進入導彈發射條件,同時減少目標造成的威脅。
3.2.3 角度占位優勢
設置目標的馬赫數Mat=1.1,高度Ht=12 km,協同機馬赫數Maa=1.3,高度Ha=14 km。分析協同機進入角q對協同攻擊區的影響,可固定其中一架協同機的進入角q=-15°,另一架協同機進入角為任意值,協同雙機與目標的進入角態勢圖如圖6所示。
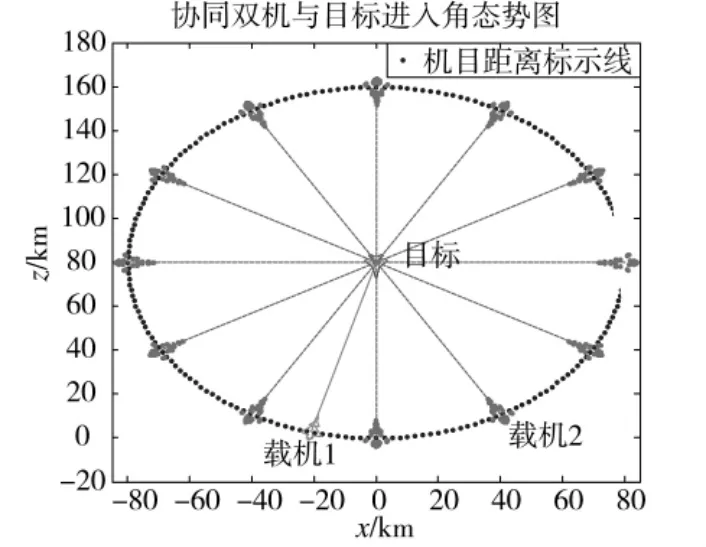
圖6 協同雙機與目標進入角態勢圖
通過仿真,任意轉彎角下目標不可逃逸距離隨另一架協同機進入角的變化曲線如圖7所示。
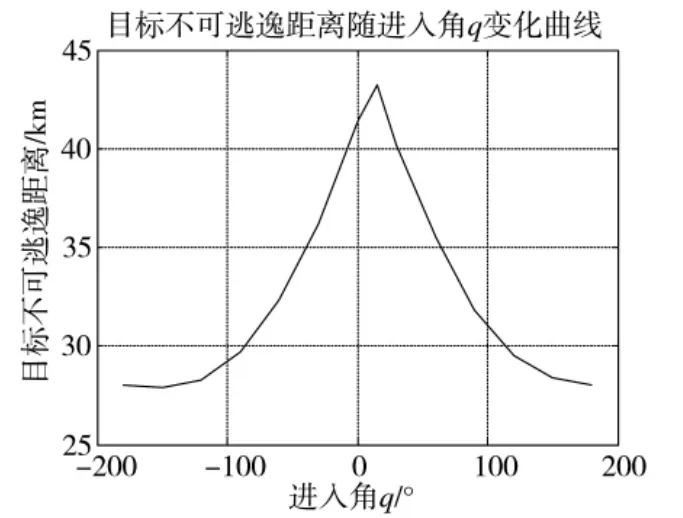
圖7 目標不可逃逸距離隨載機目標進入角變化圖
隨著協同機進入角q的增大,目標不可逃逸距離呈先增大后減小趨勢,在協同機q=15°,兩架協同機相對目標對稱占位時,目標不可逃逸距離取得最大值;當協同機進入角q在±180°附近,即尾追態勢時目標不可逃逸距離最小。
根據載機目標相對高度、相對速度、相對角度占位對協同攻擊區的影響,能夠獲得使協同攻擊區最優的協同機占位方案。
4 雙機協同最優攻擊占位決策仿真算例
設置目標的馬赫數Mat=1.1,高度Ht=12 km。以目標轉彎開始時間為仿真時間起點,目標的機動逃逸策略是勻速圓周轉彎,轉彎過載值為3,目標截獲概率是0.95。兩架協同機進行速度、高度和進入角占位,取值范圍分別為:速度、高度Ha∈[8 km,16 km]和目標進入角 q∈[-180°,180°)。
對雙機協同攻擊區模型多次仿真并解算指標值。經過仿真結果分析,該目標態勢下,雙機最優協同攻擊區占位決策為:兩架協同機馬赫數Maa=1.5,高度Ha=16 km,兩架協同機的進入角分別為q1=20°,q2=-20°。仿真結果如圖8所示。
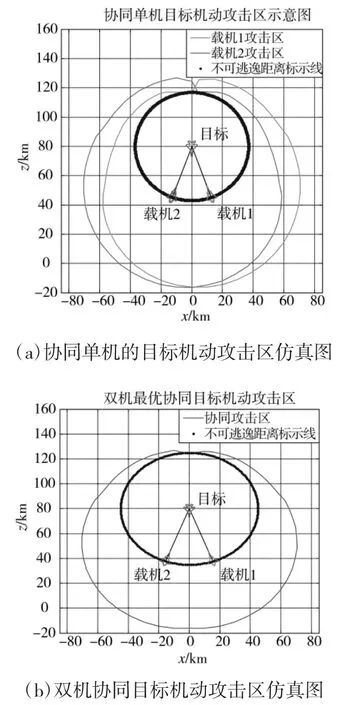
圖8 雙機最優協同目標機動攻擊區仿真結果圖
由仿真結果可見,基于協同攻擊區模型制定的最優協同攻擊占位決策與協同機占位優勢分析結論相吻合。協同機的最優高度占位和速度占位為最大允許值,協同機相對目標側向占位,進入角對稱。雙機協同目標機動攻擊區相比協同單機的目標機動攻擊區,導彈允許發射范圍明顯增大,目標不可逃逸距離增大為45 km。
5 結論
本文在攻擊區理論的基礎上,設計了適用于多機協同作戰環境的基于目標轉彎角的協同目標機動攻擊區模型;其次設計合適的評價指標選擇最優協同攻擊區,分析了協同機的高度、速度和進入角占位優勢;最后通過雙機協同最優攻擊占位決策仿真實驗,驗證了本文基于協同攻擊區模型制定最優攻擊占位決策方法的可行性。
本文的研究具有以下創新點:
1)設計了適用于多機協同作戰環境的協同目標機動攻擊區模型。
多機協同目標機動攻擊區能顯著增加導彈發射機會,允許載機在較遠距離就發射導彈實現對目標的不可逃逸攻擊。同時,由于協同目標機動攻擊區模型不需要假設目標運動方式,增加了攻擊區解算的準確性。
2)為多機協同空戰環境下載機最優攻擊占位決策的制定提供新的依據。
通過目標機動攻擊區,能評估載機在當前位置對選定目標進行攻擊的優勢區域與薄弱區域,便于制定多機協同最優攻擊占位方案。協同機偏側接敵占位攻擊,既有助于避開敵機雷達的優勢探測區,避免受到目標過多的威脅,且載機發射導彈后更易規避目標,能極大地提高載機的生存率。