一種光伏清潔機(jī)器人的研究與設(shè)計
2019-01-08 08:17:34侯杰倪受東
機(jī)械制造與自動化 2018年6期
侯杰,倪受東
(南京工業(yè)大學(xué),江蘇 南京 211800)
0 引言
隨著全球?qū)茉吹拈_采和消費(fèi),人類社會目前正面臨化石燃料日趨枯竭和生態(tài)環(huán)境嚴(yán)重污染的局面。太陽能作為一種理想的清潔能源,使光伏產(chǎn)業(yè)成為解決化石能源短缺、環(huán)境污染和溫室效應(yīng)等問題的有效途徑。但灰塵顆粒的影響一直是降低光伏電站發(fā)電量的致命問題。為了確保整個光伏電站的發(fā)電效率,光伏清潔機(jī)器人的研究與應(yīng)用已成為國內(nèi)外的熱點(diǎn)。
目前,我國西北的集中式光伏電站為了提高太陽能的利用率,已經(jīng)逐漸開始在光伏支架裝置上安裝太陽跟蹤系統(tǒng)。與固定式支架裝置相比太陽跟蹤系統(tǒng)能使光伏組件的太陽輻射接收量增加35%以上,顯著提高太陽能光伏組件的發(fā)電效率[1]。為確保光伏組件有最佳的工作角度,太陽追蹤裝置的角度調(diào)節(jié)范圍一般為-70°~70°左右,因此要使清潔機(jī)器人能可靠完成光伏組件的清潔任務(wù),則清潔機(jī)器人應(yīng)具有70°坡度的爬坡能力。另外,光伏組件在矩陣排布時相鄰兩塊太陽能電池板中間都有大約為2cm的排布間隙,所以清潔機(jī)器人在行走過程中吸附系統(tǒng)必須能克服排布間隙帶來的影響。
根據(jù)設(shè)計要求,履帶式多吸盤行走機(jī)構(gòu)對工作平面的適應(yīng)性強(qiáng)、行進(jìn)速度較快,可越過一般的障礙物。這種運(yùn)動方案不僅可以使光伏清潔機(jī)器人安全可靠地在太陽能電池板表面上行走,并能順利地克服排布間隙對吸附系統(tǒng)的影響。所以采用履帶行走方式配合多個真空吸盤吸附的運(yùn)動方案。
1 光伏清潔機(jī)器人的受力分析
光伏清洗機(jī)器人吸附行走機(jī)構(gòu)的吸盤與電池板表面具有局部柔性,但總體看來,局部柔性對整個光伏清潔機(jī)器人受力狀況影響很小。為了簡化模型的受力分析,在建立力學(xué)模型前,假設(shè)認(rèn)為光伏清潔機(jī)器人是剛體[2]。清潔機(jī)器人為剛體的受力狀況可簡化為平面力系(圖1)。清潔機(jī)器人以速度v 在光伏面板上做勻速直線運(yùn)動,忽略空氣阻力。

圖1 光伏清潔機(jī)器人的受力分析圖
圖中將清潔機(jī)器人與光伏面板接觸的部位簡化為O1、O2兩點(diǎn),這兩點(diǎn)分別為清潔機(jī)器人與光伏面板接觸的最頂端和最低端。由摩擦理論可知,當(dāng)外力的作用錐δ小于物體摩擦錐θ時,不管外力有多大,物體始終保持靜止?fàn)顟B(tài)。由此可知,當(dāng)吸附力系合力P與重力G合力的作用錐δ<θ時,清潔機(jī)器人沒有下滑趨勢。重力G對支撐點(diǎn)O1的力矩稱為翻倒力矩,用MO1(G)表示,翻倒力矩的大小與清潔機(jī)器人的質(zhì)量、重心的高度及工作平面的傾角有關(guān)。吸附力系的合力對支撐點(diǎn)O1的力矩為附著力矩,用MO1(P)表示,附著力矩的大小與清潔機(jī)器人的吸附裝置的性能參數(shù)和結(jié)構(gòu)位置有關(guān),當(dāng)清潔機(jī)器人的結(jié)構(gòu)確定時,附著力矩的大小也就隨之確定[3]。
以清潔機(jī)器人前進(jìn)方向?yàn)閥軸,橫向方向?yàn)閤軸,光伏面板的法線方向?yàn)閦軸。將圖1中各參數(shù)代入平面任意力系的平衡方程式可得:
(1)
式中:F1是O1點(diǎn)的靜摩擦力(N); F2是O2點(diǎn)的靜摩擦力(N);α是光伏面板與水平面的夾角(°);N1是O1點(diǎn)的反支力(N);N2是O2點(diǎn)的反支力(N);P1是O1點(diǎn)的等效吸附力(N);P2是O2點(diǎn)的等效吸附力(N)。
1.1 傾覆力矩計算
由圖1的受力分析圖可以推導(dǎo)出傾覆力矩計算公式為:
(2)
式中:L是履帶吸盤的最高點(diǎn)和最低點(diǎn)的距離;h是清潔機(jī)器人重心到工作平面的距離;G是清潔機(jī)器人的重力(N);α是光伏面板與水平面的夾角;β是支撐點(diǎn)和幾何重心的連線與工作平面法線的夾角,稱為抗傾覆特征角,由清潔機(jī)器人的自身結(jié)構(gòu)確定。
由式(2)可知,當(dāng)α>β時,翻倒力矩可用公式求得;當(dāng)α≤β時,機(jī)器人沒有翻倒趨勢,因此不存在翻倒力矩,于是翻倒力矩可以用式(3)來表示。
(3)
由式(3)可知, β角稱為機(jī)器人的抗翻倒特征角,其大小由機(jī)器人的結(jié)構(gòu)確定,只要壁面的斜度小于β 角機(jī)器人就不會翻倒。α=β為翻倒趨勢存在的臨界角度,記為α0,稱為翻倒臨界角 。翻倒臨界角的大小為:
(4)
1.2 附著力矩計算
附著力矩隨清潔機(jī)器人吸附系統(tǒng)的結(jié)構(gòu)及特點(diǎn)不同而變化,清潔機(jī)器人吸附系統(tǒng)的結(jié)構(gòu)形式有單吸盤式吸附和多吸盤式吸附兩種。以 O1點(diǎn)為坐標(biāo)系原點(diǎn),則單吸盤式吸附的附著力矩為:

(5)
式中:D是單吸盤式的吸附區(qū)域;P是吸盤腔體內(nèi)的真空度。
多吸盤式的附著力矩為:

(6)
式中:Di是第i個吸盤的吸附區(qū)域;pi是第i個吸盤腔體內(nèi)的真空度;n是履帶上吸盤的數(shù)量。
1.3 吸附的穩(wěn)定性
由以上公式可知,清潔機(jī)器人的吸附穩(wěn)定條件為:吸附力系合力P與重力G合力的作用錐δ<θ時,清潔機(jī)器人沒有下滑趨勢;當(dāng)α≤β時,機(jī)器人沒有翻倒趨勢,或者當(dāng)α>β時,翻倒力矩小于附著力矩。清潔機(jī)器人的吸附穩(wěn)定條件用公式表示為:
(7)
當(dāng)清潔機(jī)器人滿足以上兩個吸附穩(wěn)定條件時,清潔機(jī)器人就可以穩(wěn)定地吸附在工作平面上。
1.4 清潔機(jī)器人行走速度的研究
清潔機(jī)器人的行走速度主要決定于履帶驅(qū)動鏈輪的節(jié)圓半徑和轉(zhuǎn)速,驅(qū)動鏈輪的轉(zhuǎn)速是由驅(qū)動電動機(jī)的轉(zhuǎn)速和減速齒輪箱的減速比決定的[4]。用公式表示為:
(8)
式中:v是清潔機(jī)器人的直線行走速度;n是履帶驅(qū)動輪的轉(zhuǎn)速;r是履帶驅(qū)動輪的半徑;n電是驅(qū)動電動機(jī)的轉(zhuǎn)速;i是減速齒輪箱的減速比。
由式(8)可知,履帶式清潔機(jī)器人行走速度和驅(qū)動電動機(jī)的轉(zhuǎn)速、驅(qū)動輪節(jié)圓半徑成正比,和減速齒輪箱的傳動比成反比[5]。清潔機(jī)器人的直線行走速度v是根據(jù)設(shè)計要求的清潔速度推算出來的,所以由公式可以推導(dǎo)出驅(qū)動電動機(jī)的轉(zhuǎn)速,即:
(9)
該公式作為清潔機(jī)器人驅(qū)動電動機(jī)的選型和減速齒輪箱設(shè)計的參考依據(jù)。
1.5 清潔機(jī)器人驅(qū)動力的研究
清潔機(jī)器人沿所鋪設(shè)的履帶節(jié)向前滑動時需要克服兩者之間的摩擦阻力以及重力沿工作平面的分量。克服這個摩擦阻力的驅(qū)動力由履帶節(jié)對驅(qū)動鏈輪的反向作用力提供[5],通過對清潔機(jī)器人的受力分析可知:
F驅(qū)min=μ×sinα×G+cosα×G
(10)
式中:F驅(qū)min是清潔機(jī)器人的最小驅(qū)動力;μ是履帶節(jié)與其滑軌之間的摩擦系數(shù);α光伏面板與水平面的夾角;G是清潔機(jī)器人的重力(N)。
清潔機(jī)器人的驅(qū)動力是由履帶節(jié)對驅(qū)動鏈輪的反向作用力提供的。由牛頓第三定律可知作用力和反作用力是大小相等方向相反,所以驅(qū)動鏈輪對履帶節(jié)的作用力的大小決定了驅(qū)動力的大小。驅(qū)動鏈輪對履帶的作用力由驅(qū)動電動機(jī)提供。公式表示為:
(11)
式中:F鏈min為驅(qū)動鏈輪的最小作用力;T電min為驅(qū)動電動機(jī)的最小轉(zhuǎn)矩;r為履帶驅(qū)動輪的半徑;i為減速齒輪箱的減速比。
由于F驅(qū)min和F鏈min是一對作用力和反作用力,由公式(10)和式(11)可得:
整理后可得驅(qū)動電動機(jī)的最小轉(zhuǎn)矩公式為:
(12)
由于太陽能電池板的承載能力有限,所以清潔機(jī)器人的總質(zhì)量不能>20kg且清潔機(jī)器人的清潔速度需要達(dá)到720m2/h。根據(jù)這些設(shè)計要求再通過以上對光伏清潔機(jī)器人的理論分析,可以得出清潔機(jī)器人的各項(xiàng)性能參數(shù)如表1所示。

表1 光伏清潔機(jī)器人的性能參數(shù)表
根據(jù)光伏清潔機(jī)器人的性能參數(shù)表可以對行走機(jī)構(gòu)進(jìn)行具體方案的設(shè)計。
2 清潔機(jī)器人行走機(jī)構(gòu)的設(shè)計方案
履帶式行走機(jī)構(gòu)在清潔機(jī)器人行駛過程中,與作業(yè)面接觸的部分履帶緊緊地吸附在工作平面上。驅(qū)動鏈輪對履帶節(jié)施加一個切向的作用力,履帶節(jié)給驅(qū)動鏈輪一個反向的作用力,這個反作用力是推動清潔機(jī)器人向前行駛的驅(qū)動力[7]。當(dāng)驅(qū)動力足以克服自身重力和履帶節(jié)與其滑軌之間摩擦阻力時,清潔機(jī)器人就會向前滑動前行[8]。
圖2為單側(cè)多吸盤履帶機(jī)構(gòu)的設(shè)計圖,清潔機(jī)器人的行走履帶是由32個履帶節(jié)組成,每隔一個履帶節(jié)上面都安裝有1個吸盤組件1(吸盤組件1的詳細(xì)爆炸圖如圖3所示)。吸盤組件1在隨著履帶節(jié)由主動鏈輪4驅(qū)動沿著履帶支撐板3滑動,同時凸輪板2與履帶支撐板3之間組成一個滑槽,而吸盤組件1上的滾輪4則沿著滑槽滾動。由于履帶支撐板和凸輪板之間的間距不等,圖2中橢圓圈內(nèi)區(qū)域履帶支撐板和凸輪板之間的間距就比其他區(qū)域的間距小15mm,吸盤組件1在該區(qū)域內(nèi)滾輪4會帶動閥桿7向下壓15mm,所以稱橢圓圈內(nèi)區(qū)域?yàn)閴嚎s區(qū)域。而正因?yàn)檫@15mm的壓縮量可以使吸盤組件1由吸盤泄氣狀態(tài)(圖4(a))變?yōu)槲P吸附狀態(tài)(圖4(b)),因此吸盤組件1根據(jù)所處的位置不同而相應(yīng)的有兩種不同的狀態(tài):吸盤組件1在圖4中所示壓縮區(qū)域內(nèi)為吸附狀態(tài),在壓縮區(qū)域以外為泄氣狀態(tài)。
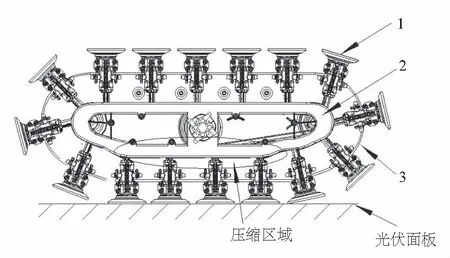
1—吸盤組件;2—凸輪板;3—履帶支撐板;4—帶減速齒輪箱的驅(qū)動電動機(jī);5—主動鏈輪圖2 多吸盤履帶機(jī)構(gòu)的設(shè)計圖
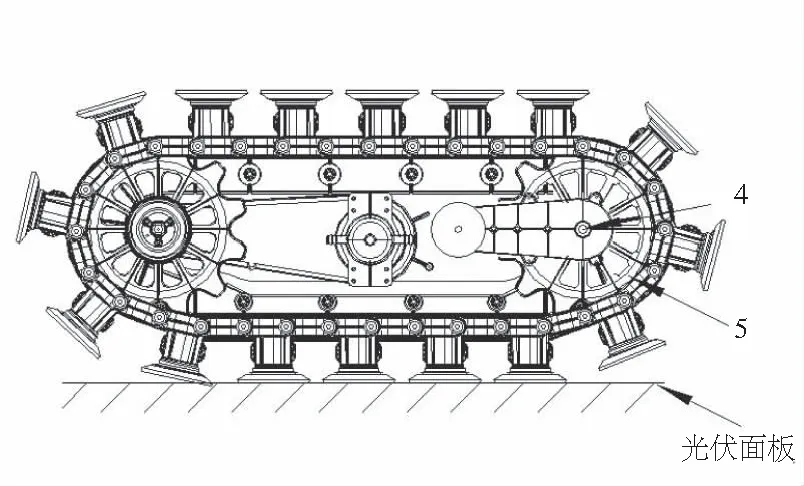
吸盤組件1常態(tài)是靠復(fù)位彈簧8把閥桿7頂在最大行程處,此時閥體9底面的泄氣孔與吸盤是連通狀態(tài),即吸盤組件1是處于泄氣狀態(tài)(圖4(a))。當(dāng)吸盤組件1處于壓縮區(qū)域時,閥桿7會被向下壓縮10mm,此時閥桿7上的O型圈會阻斷泄氣孔與吸盤的連通,而使吸盤與閥體9的腔體導(dǎo)通(圖4(b))。閥體9的腔體是與真空泵的負(fù)壓端連通的,所以此時真空泵會對吸盤進(jìn)行抽真空,使吸盤吸附在工作平面上。
1—小吸盤;2—履帶節(jié);3—滾輪軸;4—滾輪;5—?dú)忾y端蓋;6—卡簧;7—閥桿;8—復(fù)位彈簧;9—閥體;10—過濾海綿;11—底蓋;12—橡膠密封套;13—十字盤頭自攻螺絲圖3 小吸盤組件爆炸圖
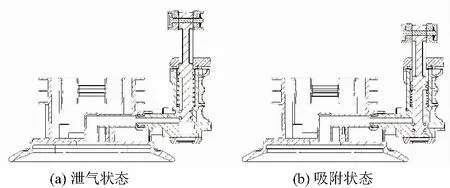
圖4 小吸盤組件不同狀態(tài)的剖視圖
3 多吸盤履帶的運(yùn)動學(xué)仿真
運(yùn)動學(xué)仿真分析的主要目的是為了驗(yàn)證小吸盤組件在履帶上運(yùn)動時凸輪對閥桿的壓縮量能否滿足設(shè)計的需求值。 多吸盤履帶行走機(jī)構(gòu)共有16個小吸盤組件,這16個小吸盤組件的內(nèi)部結(jié)構(gòu)和運(yùn)動軌跡都是一樣的,所以為了簡化運(yùn)動學(xué)仿真的復(fù)雜程度,只對一個小吸盤組件在履帶上的運(yùn)動情況做仿真分析。運(yùn)動學(xué)仿真軟件采用CreoParametric2.0,首先對多吸盤履帶行走機(jī)構(gòu)的3D設(shè)計圖進(jìn)行連接方式的加載。履帶節(jié)是在履帶支撐板的槽內(nèi)滑動,因此定義履帶節(jié)和履帶支撐板的輪廓之間為槽鏈接;定義閥桿和閥體為滑塊鏈接;閥桿的滾輪在凸輪和履帶支持板之間的槽內(nèi)滑動,定義閥桿與凸輪輪廓為槽鏈接。接下來定義仿真的初始條件:定義履帶節(jié)和履帶支撐板的輪廓之間的槽鏈接切向速度為100mm/s,仿真時間為16s,仿真幀頻為10,初始位置如圖5所示。

圖5 運(yùn)動學(xué)仿真模型連接方式加載圖
選擇閥桿密封面與閥體底面的距離作為目標(biāo)參數(shù),目標(biāo)參數(shù)在隨履帶運(yùn)動時在不同時間位置對應(yīng)的數(shù)值如圖6所示。

圖6 目標(biāo)參數(shù)隨時間的變化情況
由圖6可以看出小吸盤組件從圖5所示的位置向左隨履帶做勻速直線運(yùn)動,此時閥桿密封面與閥體底面的距離為17mm。當(dāng)小吸盤進(jìn)入壓縮區(qū)域后閥桿密封面與閥體底面的距離為6.5mm,此時小吸盤組件處于吸附狀態(tài)(圖4(b)),由此可以驗(yàn)證多吸盤履帶的機(jī)構(gòu)方案設(shè)計的可行性。
4 結(jié)語
在光伏清潔機(jī)器人運(yùn)動模塊進(jìn)行研究與設(shè)計的基礎(chǔ)上,完成了整個光伏清潔機(jī)器人的設(shè)計,并成功制造了1臺光伏清潔機(jī)器人樣機(jī),如圖7所示。

圖7 光伏清潔機(jī)器人樣機(jī)
為檢驗(yàn)該清潔機(jī)器人能否滿足實(shí)際光伏電站的使用需要,利用學(xué)校和合作單位提供的現(xiàn)場試驗(yàn)條件,對樣機(jī)進(jìn)行了運(yùn)動功能和清洗作業(yè)實(shí)驗(yàn)。
清潔機(jī)器人在開始工作時,履帶吸盤真空泵首先工作,此時在多吸盤履帶行走機(jī)構(gòu)的壓縮區(qū)域內(nèi)吸盤組件處于密閉狀態(tài),則該區(qū)域內(nèi)的吸盤被真空泵抽真空后吸附在太陽能電池板上,然后2個履帶驅(qū)動電動機(jī)驅(qū)動鏈輪帶動清潔機(jī)器人向前作勻速直線運(yùn)動。清潔機(jī)器人在行進(jìn)過程中,沿邊行走傳感器貼著太陽能電池板邊框行進(jìn),當(dāng)清潔機(jī)器人偏離運(yùn)動軌跡后由控制板控制2個履帶驅(qū)動電動機(jī)做差速運(yùn)動來進(jìn)行修正,確保清潔機(jī)器人不偏離運(yùn)動路線。清潔機(jī)器人行進(jìn)過程中,當(dāng)邊緣檢測傳感器中的3個超聲波傳感器只有部分失去信號時,控制系統(tǒng)判斷是太陽能電池板排布間隙,則清潔機(jī)器人繼續(xù)前行;若3個超聲波傳感器全部失去信號時,控制系統(tǒng)判斷是太陽能電池板的邊緣則控制板會發(fā)出轉(zhuǎn)向信號。清潔機(jī)器人順時針旋轉(zhuǎn)90°后前進(jìn)一個機(jī)身位再進(jìn)行轉(zhuǎn)向90°,然后沿太陽能電池板邊框前行,直到清潔機(jī)器人行進(jìn)過程中邊緣檢測傳感器中的3個超聲波傳感器全部失去信號后且清潔機(jī)器人轉(zhuǎn)向90°后3個邊緣檢測傳感器仍然沒有信號,則清潔機(jī)器人認(rèn)為該工作區(qū)域已經(jīng)清掃完畢,清潔機(jī)器人報警示意。
利用所設(shè)計的光伏清潔機(jī)器人樣機(jī)進(jìn)行了運(yùn)動功能和清洗作業(yè)實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果證明光伏清潔機(jī)器人可以按照所設(shè)計行走速度和轉(zhuǎn)向動作完成光伏面板的清潔作業(yè),驗(yàn)證了設(shè)計原理和理論分析的正確性。
