目標跟蹤技術研究?
2019-01-03 07:36:12
艦船電子工程 2018年12期
關鍵詞:模型
(北京西三環中路19號 北京 100841)
1 引言
雷達作為一種重要的目標探測手段,以其全天時、全天候的使用特點,在現代軍事和民用領域扮演著重要的角色。自二戰時期美軍使用的第一部雷達以來,雷達便以驚人的速度向前發展,各類型雷達相繼面試,已逐漸被應用于航海、航空、安防、海防以及軍事目標探測等眾多領域中。隨著雷達技術的發展,雷達數據處理能力也提出了不斷升級的要求。雷達數據處理中最重要的步驟就是目標跟蹤,目標跟蹤技術是雷達數據處理的核心技術,它利用雷達所獲取的運動目標狀態信息,通過具體的濾波算法處理,從而獲得探測目標的航跡信息。當前世界軍事競爭形勢日趨激烈,隱身飛機的出現、高速/超高速導彈的增多、干擾技術手段的發展、目標的高機動飛行、飛行姿態的多樣性變化等等,都給目標跟蹤帶來了不小的困難,使其面臨著目標易丟失或易跟錯等問題。因此,研究目標跟蹤技術對提高雷達的目標狀態估計精度以及對高速度、高機動目標的跟蹤能力具有重要的意義。
目標跟蹤[1]是運用跟蹤濾波算法盡可能地消除傳感器目標量測值與實際值之間的差值,從而獲得目標當前的運動狀態估值并對下一時刻的運動狀態進行預測。目標的運動狀態包括航向、航速、距離、位置、加速度等。目標跟蹤過程中存在諸多不確定因素,這些因素直接影響著系統對目標的跟蹤濾波精度。因此,目標跟蹤系統必須適時地變化以適應這些不確定因素發生的改變。雷達系統通過跟蹤濾波技術,不斷減少不確定因素對系統造成的影響,持續對目標狀態進行估計和預測,這也就是不同目標跟蹤算法需要持續改進的原因。常用的目標跟蹤算法包括四個部分:量測數據的預處理、目標運動模型的建立、機動檢測與識別、濾波及預測。其中,目標運動建模和濾波是目標跟蹤過程中最主要的兩大問題[2]。目標運動建模是對目標不確定運動狀態的數學抽象,主要解決目標處于何種運動狀態的問題。濾波是對目標運動狀態參數的估計,估計結果的好壞直接影響目標跟蹤精度。目標跟蹤基本原理框圖如圖1所示。下面,本文分別對目標跟蹤理論和多模型目標跟蹤算法的國內外研究進行歸納和總結,希望能夠為國內同行在目標跟蹤領域的研究提供一些參考與幫助。
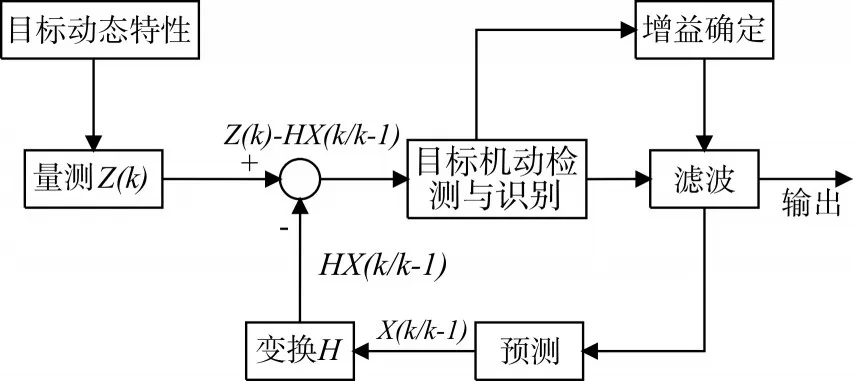
圖1 目標跟蹤基本原理框圖
2 目標跟蹤理論的研究現狀
2.1 目標運動模型
目標運動模型是目標跟蹤中的重要方面,目標模型的構建要考慮目標運動的特點,且要便于計算,從而提高跟蹤的實時性。目標運動模型構建的好壞,直接影響了目標跟蹤系統的性能優劣。通過幾十年的發展,各國的專家學者在這方面做了大量的研究,并形成了一系列的目標運動模型。
目前,目標跟蹤領域中最基本的模型分別為勻速(Constant Velocity,CV)模型[3]、勻加速(Constant Acceleration,CA)模型[3]和勻速轉彎(Coordinated Turn,CT)模型[3]。CV模型是用來描述目標處于勻速運動時的數學模型,CA模型則可以實現描述目標處于勻加速狀態時的數學模型。當目標以數值恒定的速率和角速度運動時,它在作轉彎運動,則此時可利用轉彎CT模型進行數學描述。它們的結構比較簡單,但是在目標跟蹤領域中的應用卻是最多的,同時也為研究更高級的模型做了鋪墊。
由于上述模型只能用在目標運動狀態沒有發生改變下的情形,一旦目標的加速度狀態信息有了變化,或者當目標的運動狀態發生機動時,它們就與當前狀態不會匹配,誤差將會變大。CV模型中的速度和CA模型中的加速度通常假設均服從均值為0的高斯白噪聲分布,但是這不符合實際情況。1970年,R.A.Singer提出的Singer模型[4]認為,機動模型是相關噪聲模型而不是白噪聲模型,而目標加速度是具有指數自相關的零均值隨機過程。該模型用兩個量(加速度的方差和時間相關函數)來描述目標的一維機動,加速度的方差表示運動目標的機動幅度,時間相關函數表示目標機動的持續時間。
Singer模型仍具有一定的局限性,不能完全表征目標的運動過程。為了更加貼近機動目標的運動特性,擺脫Singer模型使用零均值的限制,多種改進模型隨之發展而來。半Markov模型是其中一個具有代表性的改進型,它將目標機動的加速度或加速度變化率單獨分割出來,將其描述為一個隨機變量,相較于Singer模型多引入一個非零加速度,該非零加速度是由Markov過程的轉移概率確定的有限指令。當運動目標進行劇烈逃避機動時,一般模型的誤差都會變大,為解決這一問題Noval模型[5~6]引入了目標機動的法向加速度,它也是一個時間相關過程。我國學者周宏仁教授于1983年提出了當前統計(Current statistical,CS)模型[1,7],同Singer模型相比,Singer模型采用的是均值為0的高斯相關噪聲模型,而當前統計模型采用的是非0均值的修正瑞利分布來描述加速度特性。這種分布的優點是分布隨均值的變化而變化,方差由均值決定。因此,該算法不僅能夠估計目標的運動狀態,而且使得加速度的均值比較容易獲取,有利于對加速度的分布進行實時的修正。該模型具有兩個特點:通過運算得到的一個均值項來認為是“當前”的運動加速度;同時將修正的瑞利分布來表示“當前”運動加速度的概率密度函數。
為了更好地描述目標的強機動運動,1997年Kishore Mehrotra等提出了Jerk模型[8]。此模型通過引入加速度變化率“Jerk”,并借鑒Singer模型的建模思想,將Singer模型中三維(位置、速度、加速度)狀態向量增加到四維(位置、速度、加速度、Jerk),其基本思想是認為目標以某加速度變化率飛行時,下一刻的加速度變化率只能在當時加速度變化率的基礎上擾動變化,且是非常有限的,即認為目標的狀態分量加速度變化率是一階相關的穩態馬爾科夫過程,其均值近似為零。目標機動性的強弱采用相關時間的長短來表征:若時間相關時間值越小,表明目標的機動性越強,即加速度變化率變化越快,當時間相關時間值越大,表明目標的機動性越弱。Jerk模型在跟蹤高速的復雜運動目標時表現出良好的跟蹤精度,但計算復雜度較高,實時性較差。
2.2 濾波算法
早在1809年,高斯提出了一種最早的最優濾波算法,即最小二乘法。盡管該算法的濾波性能并不高,但是它不要求先驗信息就可以運行,所以最小二乘法目前還廣泛用于某些領域中。20世紀40年代,控制論奠基人維納(Wiener)通過在頻域設計的Wiener濾波器在隨機平穩過程系統下首先實現了線性最優動態估計,完成了對包含多種信息的信號的抑制和選通。但是Wiener濾波器對信號的條件十分嚴格,它們一定得服從平穩隨機過程,而且運算復雜度比較高同時還得非常大的內存空間來存儲信息,因此Wiener濾波器并沒有被廣泛應用。
1960年,R.E.Kalman為了解決阿波羅計劃的軌道預測,提出了Kalman(Kalman Filter,KF)濾波算法[9]。該算法適合計算機運算,因而快速發展,同Kalman濾波計算量小,實用性強等特點也讓其沿用至今,是目前應用最廣泛的濾波算法之一。然而標準的Kalman的跟蹤精度很依賴數學模型,同時還需要已知目標的狀態噪聲強度。另外,Kalman算法僅可以應用于線性系統中,所以很多專家學者發現了許多相關改進的Kalman算法。
在接下來的很長時間里,Bucy等在KF理論的基礎上,研究了一種基于非線性系統和非線性觀測下的目標跟蹤方法,即擴展卡爾曼濾波(Extended Kalman Filter,EKF)[10~11]。其主要思想是對非線性系統進行線性化處理,然后再按照標準的卡爾曼濾波方法來對系統狀態進行估計。然而EKF釆用的是高斯分布去逼近估計量的后驗分布,在強非線性情況下,存在著極大的線性化誤差,從而導致其估計性能較差。
20世紀90年代,牛津大學的Julier等人提出了無跡卡爾曼濾波(Unscented Kalman Filter,UKF)算法[12],UKF的主要思想是基于一種新的變換方法——Unscented變換(Unscented Transform,UT),UT是一種計算非線性變換中的隨機變量的統計特征的新方法,他用確定的釆樣對狀態的后驗分布進行近似,可以有效減少因非線性系統線性化而帶來的誤差,相比EKF,UKF在濾波性能上有很大改善。近幾年來,基于UKF的基本理論又出現了許多改進算法,其中包括基于平方根的無跡卡爾曼濾波算法(SRUKF)[13~14]、迭代無跡卡爾曼濾波算法(IUKF)[15]、高斯和無跡卡爾曼濾波算法[16]等,使得UKF及相關算法得到廣泛的應用。由上述分析可知:濾波跟蹤算法慢慢開始由高斯向非高斯噪聲環境轉變,由線性向非線性系統下的濾波過程進行過渡。
鑒于EKF和UKF只適應觀測方程為高斯的情況下,而在非高斯的情況下,其濾波誤差增大甚至會導致濾波發散,針對這個問題,Gordon等于20世紀90年代初在前人的基礎上提出了重要性重采樣(Sampling Importance Resampling,SIR)算法,這就是粒子濾波(Particle Filter,PF)算法[17,18],該算法是一種基于蒙特卡洛和貝葉斯估計理論的求解非線性系統問題的最優算法。PF算法通過尋找一組在狀態空間中傳播的隨機粒子來近似表示狀態向量的后驗概率密度,利用粒子均值來代替積分運算,并且以遞歸的方式對量測數據進行序貫處理,不需要對前的量測數據進行保存和再處理,有利于減小存儲空間。PF算法跟蹤精度較高,但是需要數量眾多的采樣點,計算量大,且容易產生濾波發散以及粒子退化等問題。針對粒子退化問題,近年來許多學者做了大量研究,并提出了許多改進算法,其中包括,殘差系統重采樣算法(Residual Systematic Resampling,RSR)[19]、高斯粒子濾波算法[20]、自適應粒子濾波算法[21]。
3 基于多模型的跟蹤算法研究現狀
目標跟蹤算法可分為單模型跟蹤算法和多模型跟蹤算法。單模型算法主要基于KF濾波器以及其它改進算法與單一的運動模型進行組合使用。近年來,許多學者都通過對單模型跟蹤算法的研究提出了自己的方法[22~24]。但是,隨著技術的發展和目標機動性的增強,目標的運動越來越呈現出機動性的特點。單模型在跟蹤此類目標時,常常會因為運動模型不匹配,造成跟蹤誤差過大,甚至目標丟失等問題。
1965年,D.T.Magill針對單運動模型跟蹤中存在的問題,提出了多模型(Multiple Model,MM)算法[25],MM算法使用固定個數的運動模型,各運動模型通過各自的濾波器并行工作,各濾波器之間沒有交互,最后將每個濾波器的輸出結果按照一定的權值輸出。該算法克服了使用單一運動模型匹配目標運動不夠精確的問題,缺點是未考慮到模型之間的切換及交互的問題。
為了解決MM算法各濾波器間不能交互的問題,Bar Shalom等在20世紀70年代在多模型的基礎上提出了交互式多模型(Interacting Multiple Model,IMM)算法[26],該算法考慮到了運動模型之間的跳變,同時使用多種運動模型跟蹤目掠運動,并使用馬爾科夫矩陣進行模型之間的切換,最后將濾波的結果加權輸出。IMM算法計算量與一階廣義偽貝葉斯(First Order Generalized Pseudo Bayesian,GPB1)算法基本相當,性能卻接近于二階廣義偽貝葉斯(Second Order Generalized Pseudo Bayesian,GPB2)算法。IMM算法憑借著良好的性能己經在目標跟蹤領域得到了廣泛應用。
IMM算法若要使目標跟蹤更精確,則需要匹配更多的運動模型,這會導致計算量的加大。模型數量和計算量之間達到平衡也是研究的重點。X.R.Li等在20世紀90年代提出了變結構以及模型集的MM 算法[27~28]。W.D.Blair和 D.Kazakos提出了一種二階的IMM算法[29],該算法需要考慮過去兩個采樣時間間隔內的歷史,每個模型的估計都由不同的先驗條件下的估計組合而成。
目前改進IMM算法的研究主要集中在兩個方面:一是變結構多模型算法[30~32],是使用時變的模型集代替固定的模型集的IMM算法,適用于解決結構和參數未知的估計問題,但是變結構多模型算法存在著計算量大、結構復雜、缺乏統一的標準等缺點。二是自適應多模型算法[33~35],這些算法根據目標的實際運動情況自適應的進行參數的調整,適用于機動目標跟蹤的情況。
4 結語
結合目標跟蹤技術的國內外研究現狀,下一步的研究重點從以下及各方面考慮:
1)現有的目標運動模型還比較老舊,還不能完全描述當前高機動目標的運動特性,在這方面有待進一步研究;
2)現有的濾波算法也只是基于較早的經典濾波算法如EKF算法、UKF算法、PF算法等針對特定問題做了些許改進,沒有本質上解決當前的目標狀態估計問題;
3)現有的多模型跟蹤算法研究可以考慮利用深度學習等人工智能算法估計出目標的運動模型,做到多個運動模型之間的自適應切換,從而滿足目標高機動跟蹤要求;
4)現有目標跟蹤研究還大多建立在數字仿真的基礎上,對于實測數據驗證方面還有待進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
