一種水聲應答器的浮體設計?
2019-01-03 07:36:38
艦船電子工程 2018年12期
(91388部隊96分隊 湛江 524022)
1 引言
目前,能用于水下運動位置監測的長基線水聲定位系統有兩種[1],分別是浮標式和潛標式水聲定位系統。潛標式水聲定位系統由聲學應答器分系統、浮標中繼站分系統、基站分系統等三部分組成的。聲學應答器分系統負責水下目標位置的聲學測量;加裝了合作信標的水下被測目標在陣內運動時,發射Pinger信號。聲學應答器中的水聽器接收到水聲信號,送往水聲信號處理系統進行處理,得到并記錄到達時刻與參考時刻的差[3];主控計算機對布放的聲學應答器陣單元中的三個(或四個)潛標的數據采用球面交匯技術(或雙曲面交匯技術)解算出目標位置。當目標連續發射Pinger信號時,系統可測量出目標的三維運動軌跡[4]。
單個應答器工作狀態如圖(1)所示,此時應答器通過鋼纜與重物連接,錨于海底。收到釋放指令后,應答器脫開重物,由浮體或浮球帶動,上浮至海面,如圖(2)所示。
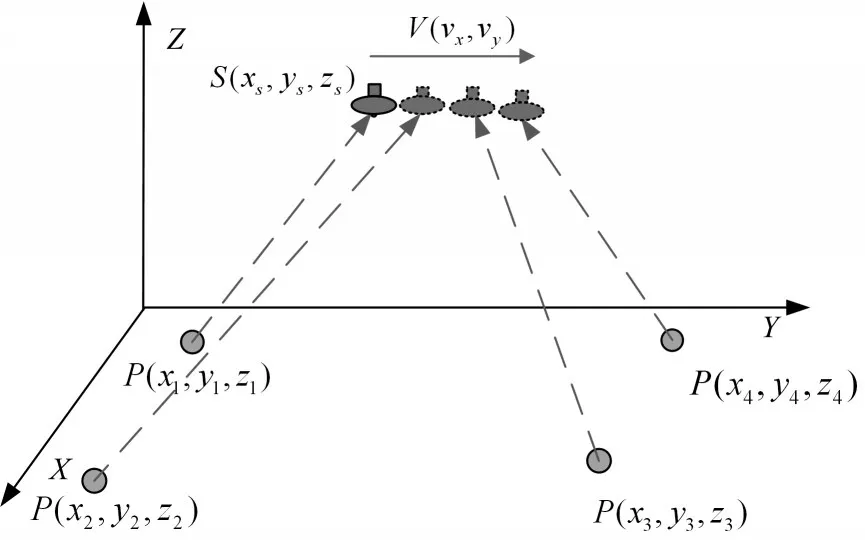
圖1 同步模式潛艇自導航工作態勢圖(4元陣元)
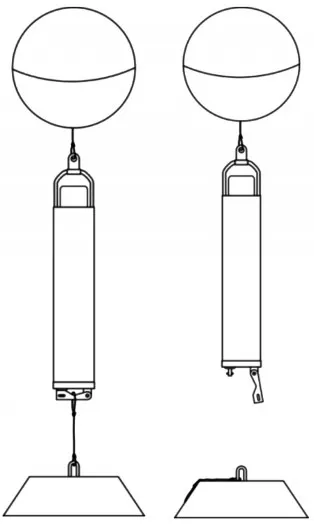
圖2 應答器工作及釋放狀態示意圖
本文主要討論的是淺海試驗中應答器在釋放上浮過程中,防止漁網纏繞及應答器換能器磕撞采用環抱式浮體-浮力夾克設計[4]。
2 浮力夾克設計方案
在較淺水域使用應答器時,需要使用浮球提供浮力[5]。由于海底環境較為復雜,浮球容易被漁網掛住,降低應答器回收可靠性,所以考慮設計浮力夾克安裝于應答器外殼上。
浮力夾克為分瓣對稱式結構,中心為圓形與應答器外形配合,通過螺桿夾緊實現連接,兩端與應答器端部配合,防止軸向串動。浮力夾克內部采用輕質浮材,外表面涂覆致密防水層,具有韌性,防沖擊,降低吸水率。根據應答器所需浮力,對浮力夾克的尺寸進行設計[6]。其外形如圖3所示。
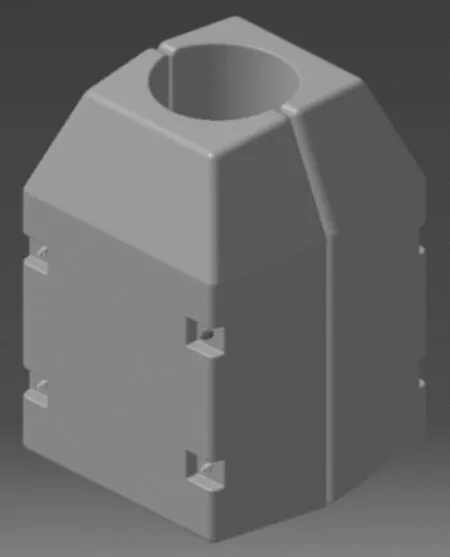
圖3 浮力夾克結構示意圖
此外,應答器安裝浮力夾克后,可在釋放上浮后實現自動翻轉功能,保證應答器換能器始終保持在水中,可在水面正常接收與發射信號,方便應答器回收。其工作狀態示意圖如圖4所示。
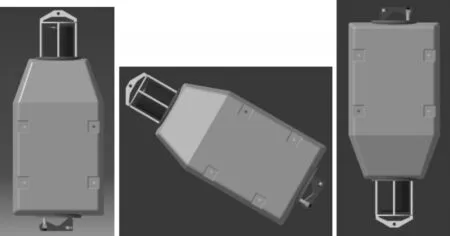
圖4 應答器釋放后翻轉示意圖
3 應答器姿態控制
應答器穿上浮力馬甲在海底工作時,受到浮力、重力、拉力、海流推力的綜合作用,整體潛沒于水下,受力狀態表現為潛體。潛體的浮心位于物體的形心,不因為傾斜而變化。
海流推力可忽略時,應答器受力狀態如圖5所示[7],浮力B通過浮心b,垂直向上。重力G垂直向下,重心為g。纜繩的拉力T作用在下端,垂直向下。受力分析如下[8]:
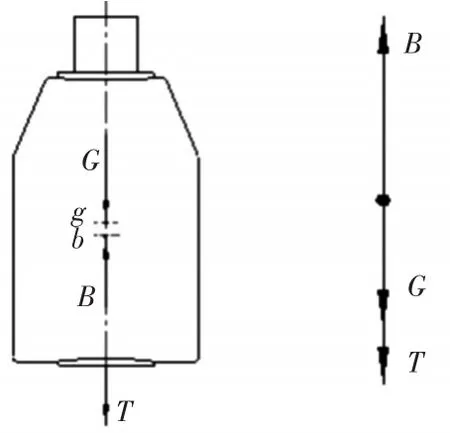
圖5 應答器海底受力狀態A

考慮海流推力R時,應答器發生偏轉,傾角為α,重心為g'點,浮心為b'點。纜繩拉力T'作用在下端o點[9],傾角為β,推力R與軸線垂直,作用在形心r'[10]。如圖 6 所示。
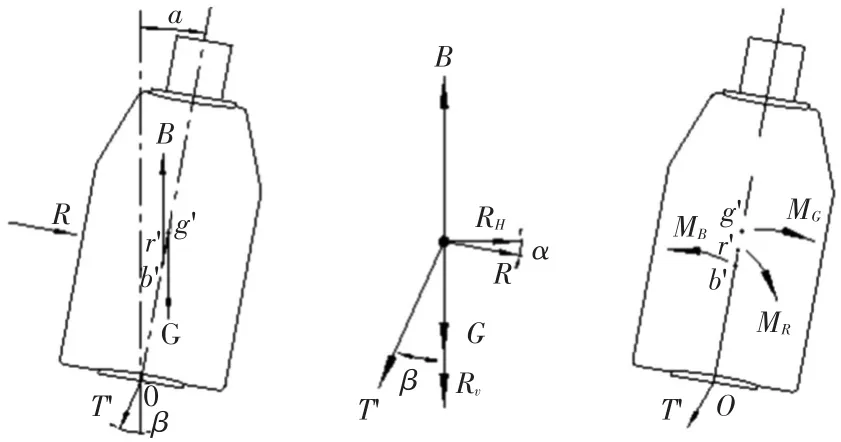
圖6 應答器海底受力狀態B
垂直方向:

水平方向:

式中:B為浮力,N;CD為流阻系數;G為重力,N;D為物體尺度,m;T為拉力,N;μ為動力粘性系數,kg·m-1·s-1;R為海流推力,N;v為流速,m/s;ρ為流體質量密度,kg·m-3;A為迎流面積,m2。
穩定性分析:
浮力產生的恢復力矩:

應答器重力產生的傾覆力矩:

海流推力產生的傾覆力矩:

合力矩:
海流推力:

應答器釋放后浮出水面時,浮體與水面相交的平面稱為浮面,垂直浮面并通過重心的垂線稱為浮軸。當浮體處于平衡狀態時,浮心b和重心g均在浮軸上。當浮體轉動時,浮心將移到另一位置b,通過浮心b的浮力作用線將與原浮軸交于一點M,M稱為定傾中心。定傾中心M到原浮點b的距離ρ稱為定傾半徑,重心和原浮心的距離稱為偏心距e。
浮體的穩定性取決于定傾中心M與重心g的位置關系。如果定傾中心M高于重心g,即ρ>e,轉動后浮力和重力產生恢復力矩,浮體是穩定的。反之,如果定傾中心M低于重心g,即ρ<e,轉動后浮力和重力產生傾覆力矩,則浮體是不穩定的。ρ=e為隨遇平衡。
釋放后,應答器上浮,處于浮體狀態。由于重心位于浮心之上,發生偏轉。
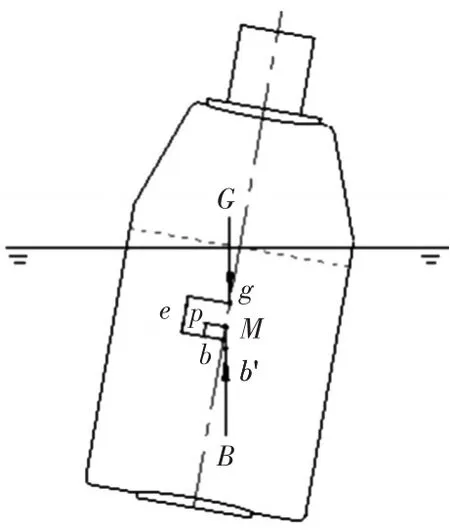
圖7 應答器浮體狀態穩定性分析
經過計算,以應答器艙筒的中心為基準點,應答器和浮力馬甲的整體重心約為7.4mm,浮心約為-54.7mm。當應答器在海流0.5節并姿態角約為15°時,定傾半徑ρ約為23.4mm,偏心距e約為62.1mm。如上圖所示,ρ<e,應答器處于不穩定狀態,受傾覆力矩,發生偏轉,換能器指向水下,符合設計要求。
4 試驗驗證
水下布放3套聲學應答器,船載分系統置于測量船上。在船載分系統對各聲學應答器進行測陣后,測量船在應答器陣內某處停船漂泊。船載分系統周期性發射詢問信號,船載分系統檢測詢問信號和各應答器的應答信號,船載顯控分系統解算艇載發射換能器的大地坐標,并統計均方根誤差,統計次數100。分別進行了三種詢問應答模式和一種雙詢問雙應答模式下的系統定位精度測試,同時對應答器進行了釋放檢測,試驗結果顯示,浮力夾克在不影響水聲換能器的工作狀態下,上浮姿勢良好,完全符合設計要求。
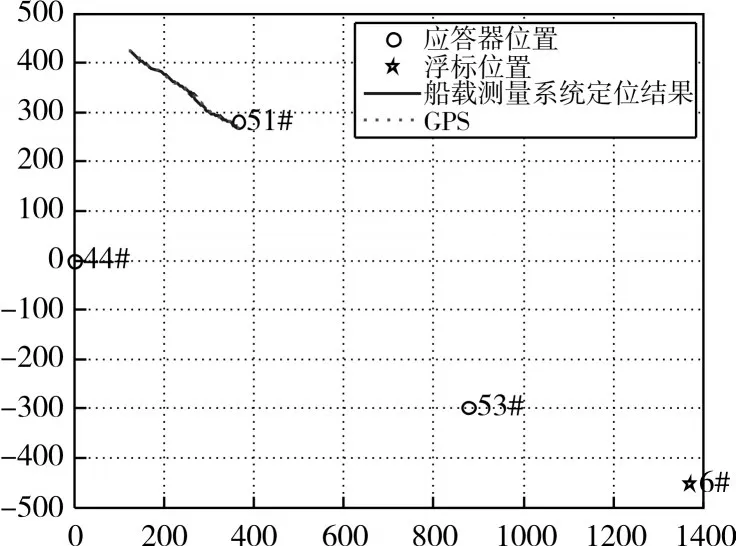
圖8 測試試驗對比圖
5 結語
經過理論分析和海上試驗證明,針對水聲應答器的浮力夾克設計是合理的,對后續的水聲工程實驗設計具有借鑒意義。
