基于模糊自整定粒子群算法的多圓盤過濾機槽體液位控制系統(tǒng)
2019-01-02 01:07:32佟永亮袁志敏
中國造紙 2018年11期
關鍵詞:液位
湯 偉 佟永亮 王 帥 袁志敏 宋 濤
(1.陜西科技大學電氣與信息工程學院,陜西西安,710021; 2.陜西農(nóng)產(chǎn)品加工技術研究院,陜西西安,710021; 3.安德里茨(中國)有限公司,廣東佛山,528000)
紙機抄造過程中排出的白水中含有大量的纖維、填料等物質(zhì),將其直接排放不僅會造成浪費,還會污染環(huán)境。對于白水的處理一般采用多圓盤過濾機進行回收。在白水回收過程中,多圓盤過濾機槽體液位直接影響白水回收效率。當前對于過濾機槽體液位控制在穩(wěn)定進漿流量的基礎上,通過調(diào)節(jié)過濾機中心主軸轉速來實現(xiàn)液位控制,但槽體液位控制系統(tǒng)存在非線性、時滯的特點,同時由于液位存在波動,使得液位檢測值存在波動,增加了過濾機液位控制的難度,尋求合理的多圓盤過濾機槽體液位控制算法成為解決槽體液位控制的重要方法。
當前對于多圓盤過濾機液位控制多采用傳統(tǒng)的比例積分微分(Proportional Integral and Derivatice, PID)控制。PID控制具有結構簡單、不依賴對象模型、且具有令人滿意的控制性能和良好的魯棒性[1],但PID控制器的控制效果依賴于PID參數(shù),故PID參數(shù)整定顯得尤為重要。目前其主要的整定方法有兩類:①傳統(tǒng)參數(shù)整定方法,如ZN法、單純形法、幅值裕度法等;②智能化整定方法,如基于遺傳算法[2]、蟻群算法[3]、粒子群算法[4]等智能PID優(yōu)化方法。粒子群優(yōu)化(Particle Swarm Optimization, PSO)算法作為一種高效、簡單的并行搜索算法,具有程序易實現(xiàn)、參數(shù)調(diào)整少、魯棒性好等優(yōu)點,但將其應用于PID參數(shù)整定時,算法后期易出現(xiàn)早熟問題,計算精度低、收斂速度慢。因此,本課題提出了一種模糊自整定粒子群優(yōu)化(Fuzzy Self-Tuning Particle Swarm Optimization, FST-PSO)算法來整定多圓盤過濾機槽體液位控制回路的PID參數(shù),MATLAB/Simulink仿真結果與實際應用過程表明,經(jīng)FST-PSO算法優(yōu)化后的PID控制提高了槽體液位控制的精度,降低了液位的波動,提高了白水回收效率。
1 槽體液位控制系統(tǒng)
1.1 多圓盤過濾機白水回收工藝
原白水與墊層漿被泵送至多圓盤過濾機的進料箱內(nèi),混合后白水溢流至過濾機槽體。在主軸電機的作用下,中心主軸帶動過濾圓盤旋轉,在水腿產(chǎn)生的真空抽吸力的作用下,槽體內(nèi)白水流入濾盤內(nèi)部、纖維附著在過濾圓盤表面形成濾餅,隨濾盤旋轉,濾盤表面濾餅厚度增加,過濾阻力變大,白水中纖維通過量逐漸減少,所以通過過濾圓盤后的濾液中固形物含量逐漸降低,便形成了固形物含量不同的3種濾液:濁濾液、清濾液、超清濾液(清濾液和超清濾液均來自于真空過濾區(qū))。隨著過濾的進行,濾盤表面沉積的濾餅在剝漿水流作用下被剝除,繼而進入下一個過濾周期[5- 7]。多圓盤過濾機濾盤盤面分區(qū)圖如圖1所示。
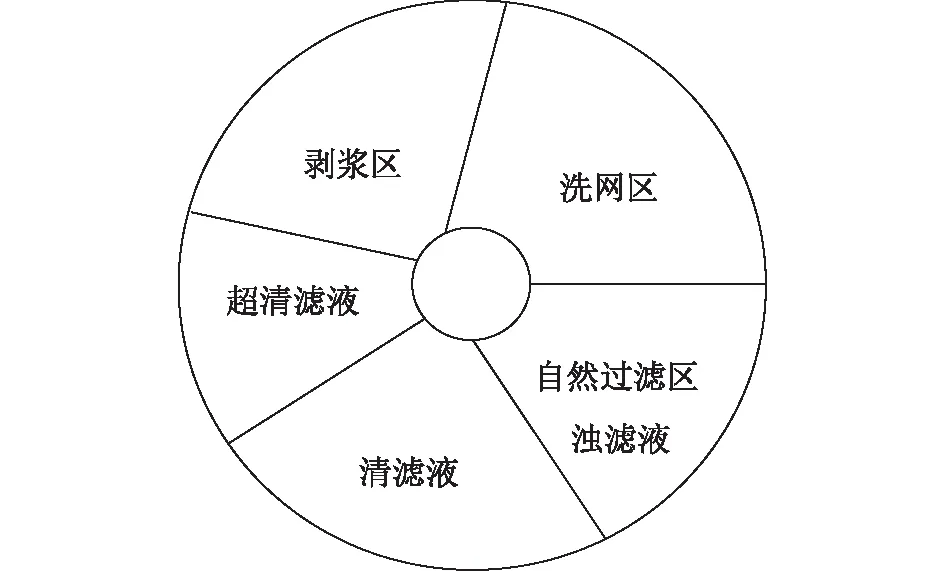
圖1 多圓盤過濾機濾盤盤面分區(qū)圖
1.2 槽體液位對白水回收效率影響
白水處理過程中,槽體液位直接影響白水回收效率。當液位低于濾盤中心主軸時,濾盤便不會形成真空,過濾機不能正常工作;當液位高于中心主軸時,隨著液位的增加,其白水處理能力增強,但是液位過高時,也會降低白水回收效率。液位過高時,濾餅出液面后就被剝漿水流剝下,減少了出液面后的真空過濾區(qū)運行時間在整個過濾周期內(nèi)的比例,相應地會減少超清濾液的形成,降低白水回收效率;同時,在同等濃度下,液位高度增加時,濾盤表面沉積的纖維量增加,濾餅厚度增加,但是脫水時間短,此時濾盤表面的纖維含水量大,不易形成漿層,便不易被剝漿水流剝下,纖維附著在濾盤表面,影響濾網(wǎng)的再生能力,降低白水回收效率[8]。當液位高于接漿斗時,會造成混合后白水直接通過回收漿料通道流走,過濾機不能正常工作。綜合回收效率和處理能力,當前多圓盤過濾機槽體內(nèi)液位設定為高于中心主軸100~200 mm[9]。
1.3 槽體液位控制回路
在流量控制回路的作用下,槽體內(nèi)混合后白水的流入量穩(wěn)定在一定范圍內(nèi),進而通過液位控制回路實現(xiàn)槽體液位的控制,其控制回路如圖2所示。液位傳感器檢測到液位的實際值,通過實際值與設定值運算獲得偏差,偏差傳輸至控制器調(diào)節(jié)主軸電機的頻率,通過主軸轉速的不同來調(diào)節(jié)濾液流出量進而調(diào)節(jié)液位。當主軸電機頻率增大時,主軸轉速增加,單位時間內(nèi)濾液的流出量增加,液位降低;同理,主軸電機頻率減小,主軸轉速減小,單位時間內(nèi)濾液的流出量降低,液位升高。
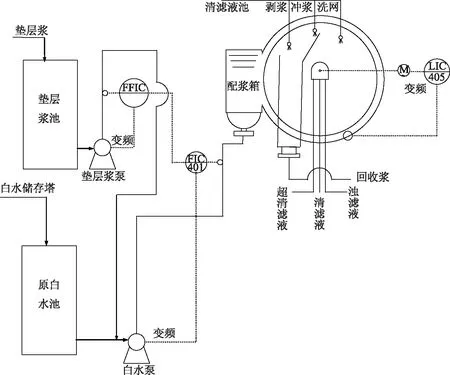
圖2 多圓盤過濾機槽體液位控制回路圖
2 粒子群算法及其改進
2.1 標準粒子群算法
PSO算法是Kennedy和Eberhart根據(jù)鳥類捕食行為發(fā)明的一種全局優(yōu)化算法[10]。算法在d維空間中存在m個粒子,則粒子i(i=1,2…m)第t次迭代后,當前位置為xi(t)=[xi1,xi2,…xid],當前速度為vi(t)=[vi1,vi2,…vid]。設pbesti(t)=[pi1,pi2,…pmd]為粒子i所經(jīng)歷的最好位置,gbest(t)為群體所經(jīng)歷的最好位置。粒子根據(jù)自身當前的速度和位置進行迭代,則第(t+1)次的迭代公式見公式(1)和公式(2)。
vi(t+1)=wvi(t)+c1r1(pbesti(t)-xi(t))+c2r2(gbest(t)-xi(t))
(1)
xi(t+1)=xi(t)+vi(t+1)
(2)
式中,ω為慣性權重,ω的取值范圍為(0.4,1)[11];r1、r2是在[0,1]之間均勻分布的隨機數(shù);c1為認知因子,c2為社會因子,c1和c2被統(tǒng)稱為學習因子,c1、c2的取值范圍為(0.5,2.5)[12]。為了迭代過程中避免粒子沖出搜索空間,一般限定粒子位置的取值范圍為[xmin,xmax],以此對粒子的移動范圍進行限制,達到對算法更好的控制。
2.2 模糊自整定粒子群算法
標準PSO算法中,慣性權重ω決定了粒子對當前速度繼承的多少,較大的ω具有較強的全局搜索能力,反之,較小的ω有較強的局部探索能力[13];c1、c2分別表征了粒子個體的最優(yōu)位置的重要性和全局最優(yōu)位置的重要性,在運算過程動態(tài)的調(diào)整c1、c2的大小可以產(chǎn)生良好的計算結果[14]。基于此,本課題提出一種依據(jù)粒子的迭代系數(shù)、粒子相似度、粒子適應度誤差3個參數(shù),利用模糊控制動態(tài)調(diào)整粒子群算法的慣性權重ω、學習因子c1、c2的方法,平衡PSO算法的全局搜索能力和局部探索能力,從而有效地解決粒子群早熟和收斂速度慢問題。
2.2.1 模糊控制器輸入變量的定義
(1)迭代系數(shù)
粒子的迭代系數(shù)是群體中個體當前迭代次數(shù)與最大迭代次數(shù)的比值,以此來衡量迭代進程。在算法初期,λ趨近于0,隨迭代的進行,λ逐漸趨近于1,即λ∈(0,1),其計算見公式(3)。
(3)
式中,t表示當前的迭代次數(shù),maxiter表示最大迭代次數(shù)。
(2)粒子相似度
粒子的相似度是所有粒子與全局最優(yōu)粒子的空間距離的平均值開平方的倒數(shù)。當粒子與最優(yōu)粒子的相距很遠時,那么粒子與全局最優(yōu)粒子距離的平均值就會變大,粒子的相似度就會很小,γ趨近于0;同理,空間距離小時,其相似度相應的就會增強,γ趨近于1,即γ∈(0,1),其計算見公式(4)。
(4)
式中,m為種群中粒子總數(shù),d表示所求問題的維數(shù),xij(t-1)表示上一迭代時第i個粒子的第j維的位置,gbestj(t-1)表示截止上一次迭代的全局最優(yōu)粒子的第j維。
(3)適應度誤差
粒子的適應度誤差是全局最優(yōu)粒子的適應度值與所有粒子適應度值比值的平均值與1之間的誤差。當粒子的收斂效果不好時,全局最優(yōu)粒子適應度值與粒子的適應度值之比較小,相應的誤差會大,ε趨近于1;當趨近于全局最優(yōu)時,全局最優(yōu)粒子適應度值與粒子適應度值之比變大,趨近于1,則誤差ε趨近于0。即ε∈(0,1),其計算如公式(5)所示。
(5)
式中,f_gbest為粒子的全局最優(yōu)粒子的適應度值,fit(i)為第i個粒子的適應度值。
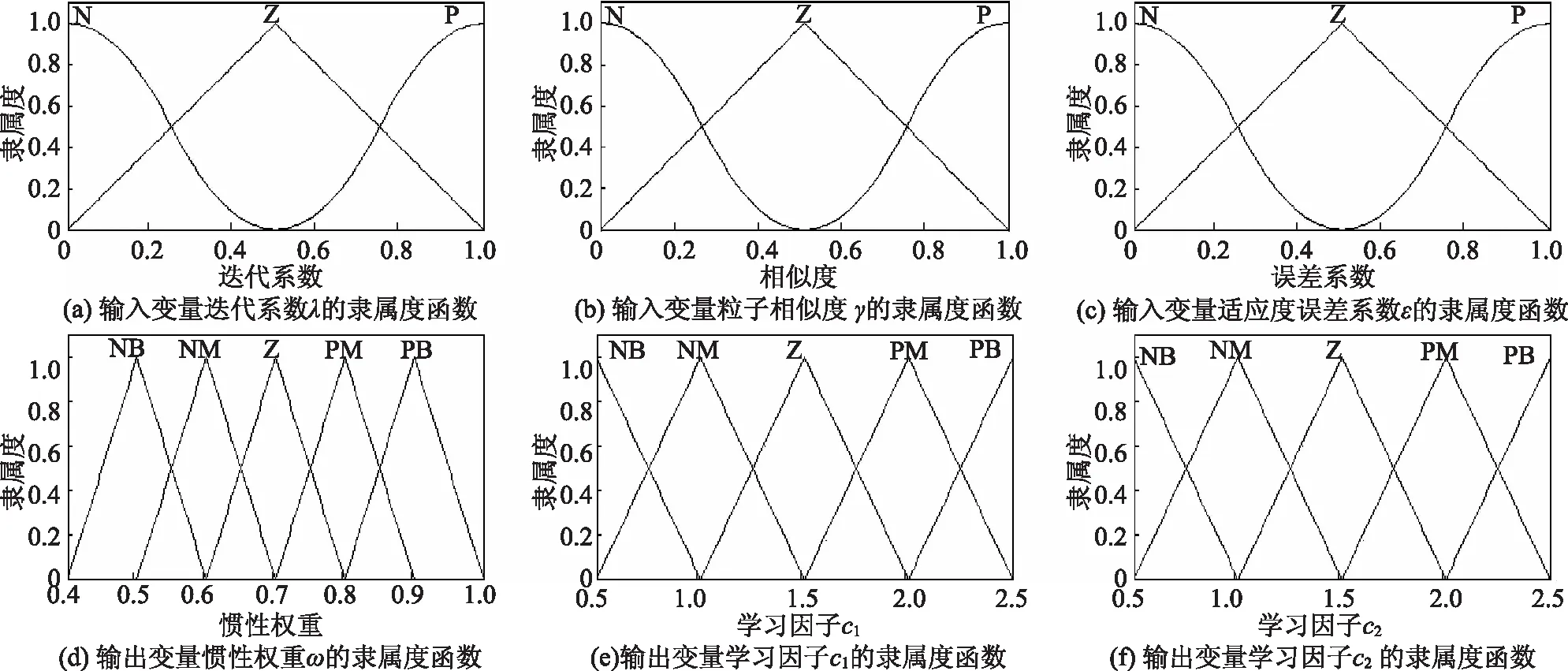
圖3 模糊控制器輸入變量、輸出變量隸屬度函數(shù)
2.2.2 模糊控制器設計
該模糊控制器的輸入為迭代系數(shù)λ、粒子相似度γ、粒子適應度誤差系數(shù)ε,輸出慣性權重系數(shù)ω,學習因子c1、c2。由以上分析知,λ、γ、ε的設定論域為[0,1],分為“負(N)”、“零(Z)”和“正(P)”;慣性權重系數(shù)ω的設定論域為[0.4,1],分為“負大(NB)”、“負中(NM)”、 “零(Z)”、“正中(PM)”和“正大(PB)”;學習因子c1、c2的設定論域為[0.5,2.5],分為“負大(NB)”、“負中(NM)”、 “零(Z)”、“正中(PM)”和“正大(PB)”。輸入變量和輸出變量的隸屬函數(shù)如圖3所示。模糊控制器的模糊推理選擇Mamdani推理法[15],解模糊選擇centroid重心法。
應用模糊控制來動態(tài)調(diào)整粒子群的參數(shù)是為了能夠平衡粒子群運算初期的全局搜索能力和后期的局部探索能力,避免粒子產(chǎn)生早熟,提高收斂速度。同理,當相似度高、適應度誤差小時,粒子距離近,應當增加粒子的全局搜索能力,避免進入局部最優(yōu);反之,當相似度低、適應度誤差高時,應增強粒子的局部探索能力[16]。根據(jù)以上原則,制定模糊推理規(guī)則如表1所示。
FST-PSO算法的流程框圖如圖4所示。
3 FST-PSO算法優(yōu)化PID控制器參數(shù)
3.1 槽體液位控制系統(tǒng)
槽體液位控制結構框圖如圖5所示。其中r(t)為液位設定值,y(t)為液位的實際檢測值,e(t)為液位的設定值與檢測值之差,kp、ki、kd分別為時間、積分、微分常數(shù),u(t)為控制器輸出值。

表1 FST-PSO模糊邏輯規(guī)則表
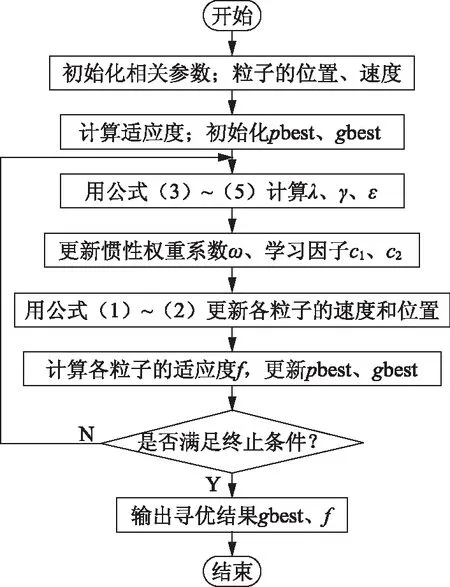
圖4 FST-PSO算法流程框圖
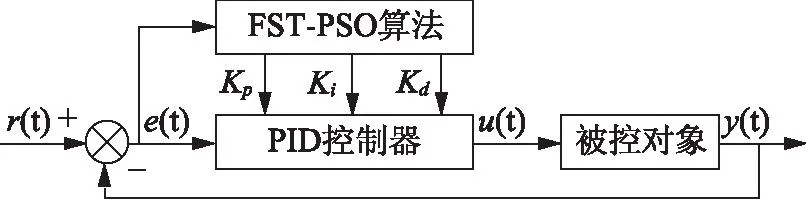
圖5 基于FST-PSO算法的PID控制系統(tǒng)框圖
(6)
3.2 基于FST-PSO算法的PID控制器參數(shù)優(yōu)化
PID在槽體液位控制過程中,并不能表現(xiàn)出良好的控制性能,并不是PID不適用于該過程,只是PID參數(shù)不能夠滿足要求。針對上述問題,利用FST-PSO算法的尋優(yōu)能力,在參數(shù)限定的范圍內(nèi)找出一組使控制性能指標最優(yōu)的PID參數(shù),其控制器原理如圖5所示。PID控制器的傳遞函數(shù)形式表達見公式(7)。
(7)
選取適應度函數(shù)f(x)的關鍵在于使優(yōu)化后控制系統(tǒng)的偏差信號e(t)趨于零,并且具有較快的響應速度和較小的超調(diào)量,因此常采用能體現(xiàn)綜合性能的指標。絕對偏差積分(IAE)、時間偏差平方積分(ITSE)、積分平方偏差(ISE)、時間絕對偏差積分(ITAE)為常用的綜合性能評價指標。結合實際和各指標差異,本課題選取ITAE為適應度函數(shù)(目標函數(shù)),其表達式見公式(8)。

(8)

根據(jù)FST-PSO算法流程,應用PID參數(shù)優(yōu)化問題時,首先描述粒子特征的維數(shù)d=3;然后初始化粒子的速度和位置,粒子位置的初始化按照ZN-PID的方法進行初始值區(qū)間的初步確定;最大限制速度為位置范圍之差的一半,而后根據(jù)算法流程進行PID參數(shù)優(yōu)化。
4 系統(tǒng)仿真及應用
4.1 實驗仿真分析
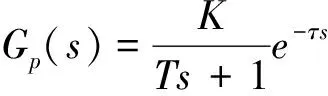
基于MATLAB/Simulink平臺,運用ZN經(jīng)驗法(ZN-PID)、標準PSO算法(STD-PSO-PID)及本課題所提FST-PSO算法整定PID參數(shù)(FST-PSO-PID)對多圓盤過濾機槽體液位控制回路進行PID參數(shù)調(diào)節(jié),被控過程傳遞函數(shù)如圖6所示。
圖6為標準PSO、FST-PSO優(yōu)化對象Gp(s)的優(yōu)化過程曲線。由圖6可知,F(xiàn)ST-PSO算法與標準PSO算法相比有效地避免了早熟現(xiàn)象,提高了收斂速度和精度。
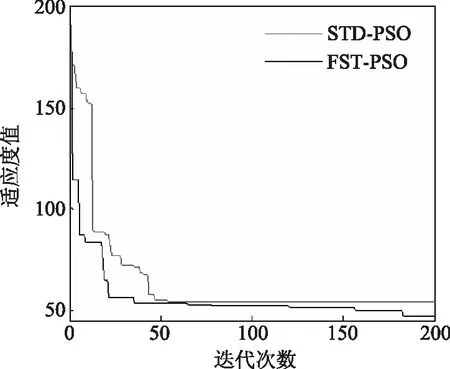
圖6 PID控制器參數(shù)優(yōu)化過程曲線
經(jīng)以上3種方法整定優(yōu)化后得到PID控制器參數(shù)如表2,控制效果見圖7。圖7(a)為標稱對象Gp(s)在不同算法整定優(yōu)化下的單位階躍響應和負載擾動響應曲線;圖7(b)為對象Gp(s)的時間常數(shù)T增大30%時的單位階躍響應曲線和負載擾動響應曲線;圖7(c)為對象Gp(s)的純滯后時間常數(shù)τ增大30%時的單位階躍響應曲線和負載擾動響應曲線;圖7(d)為對象Gp(s)的時間常數(shù)T、純滯后時間常數(shù)τ同時增大30%時的單位階躍響應曲線和負載擾動響應曲線。
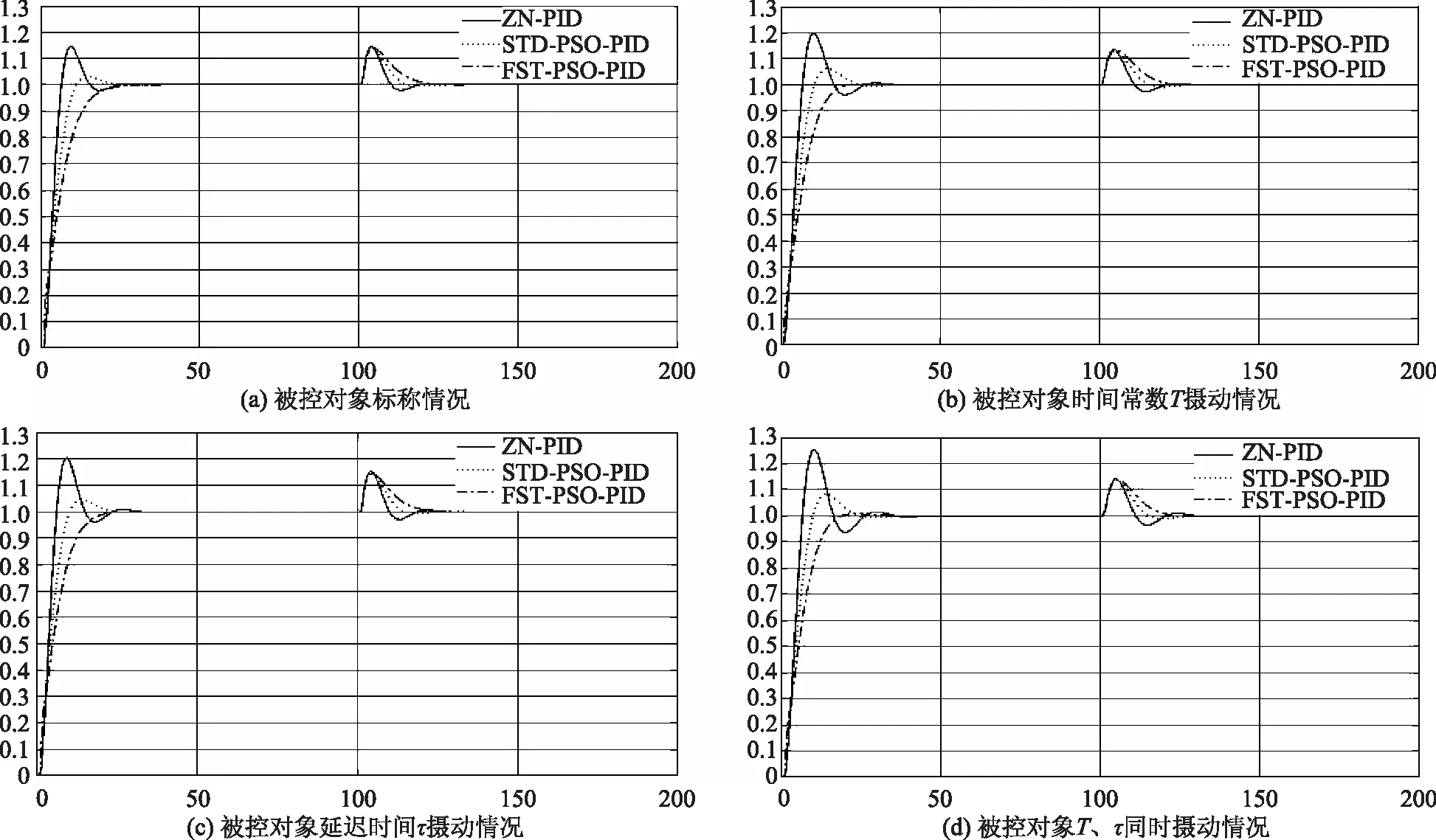
圖7 不同被控對象的動態(tài)響應曲線
在以上各圖中,負載擾動在t=100 s時加入,擾動大小為20%的單位階躍信號。
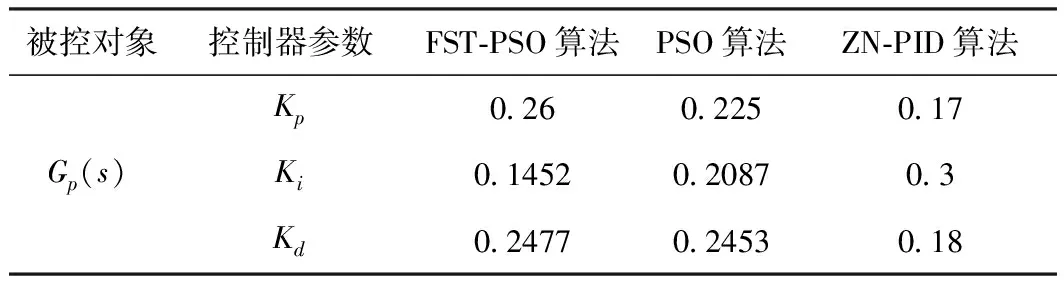
表2 PID控制器的整定優(yōu)化參數(shù)
由圖7的動態(tài)響應曲線可以看出,相比于ZN經(jīng)驗法整定的PID,經(jīng)過FST-PSO算法優(yōu)化的PID參數(shù)在被控對象處于標稱情況下時,超調(diào)量小,調(diào)節(jié)時間短,響應速度快;當參數(shù)發(fā)生攝動時,其優(yōu)化的PID參數(shù)相比于ZN-PID在調(diào)節(jié)時間、響應速度以及魯棒性方面依舊存在較大的優(yōu)勢。相比于標準PSO算法優(yōu)化的PID參數(shù),經(jīng)過FST-PSO算法優(yōu)化的PID參數(shù)在被控對象的響應速度和魯棒性上兩者差距不大,但是無論被控對象處于標稱情況還是受到攝動時,經(jīng)過FST-PSO算法優(yōu)化的PID參數(shù)的超調(diào)均小于經(jīng)標準PSO算法整定的PID參數(shù)。綜合控制器的響應速度、調(diào)節(jié)時間、魯棒性能、超調(diào)量等性能,相比于ZN經(jīng)驗法整定的PID、標準PSO算法優(yōu)化的PID參數(shù),經(jīng)過FST-PSO算法優(yōu)化的PID參數(shù)表現(xiàn)出良好的控制性能。
4.2 實際應用
本課題所述控制算法已應用于保定滿城某造紙廠多圓盤過濾機槽體液位控制回路中。該廠多圓盤過濾機液位最高限為2 m,經(jīng)過量程標定將液位高度轉化為0~100%。該廠將液位的設定值設置在高于中心主軸頂點160 mm,經(jīng)標定后為88%。應用常規(guī)PID控制,液位總是出現(xiàn)大超調(diào)、響應時間長、控制精度低等問題,液位的實際檢測值為84%~94%,控制精度為6.82%。液位在1680~1880 mm之間波動,高于中心主軸80~280 mm之間,不滿足工藝要求在主軸上方100~200 mm的范圍內(nèi),影響多圓盤過濾機白水回收效率。針對這一問題,應用FST-PSO算法進行多圓盤過濾機槽體液位控制。結合OPC技術,讀取PLC中的信號送入MATLAB工作空間,經(jīng)過MATLAB中的基于FST-PSO算法的PID控制器參數(shù)整定,然后將結果通過OPC協(xié)議送回到PLC,通過AI模塊輸出主軸電機變頻器頻率,通過調(diào)節(jié)中心主軸轉速調(diào)節(jié)槽體液位,實現(xiàn)槽體液位控制。經(jīng)過現(xiàn)場調(diào)試,在工況穩(wěn)定后,得到某一時間段的濃度監(jiān)控畫面如圖8所示,在保證設定值88%不變的情況下,液位的實際檢測值為86%~90%,控制精度為2.27%。液位在1720~1800 mm之間波動,高于中心主軸120~200 mm之間,滿足工藝需求,提高了液位控制精度和白水回收效果。證明該算法具有一定實際價值。

圖8 多圓盤過濾機槽體液位控制系統(tǒng)實時運行曲線
5 結 語
本課題將模糊自整定(FST)與PSO算法相結合提出了一種FST-PSO算法,并將該算法用于多圓盤過濾機槽體液位控制回路PID控制器參數(shù)優(yōu)化。仿真實驗結果表明,本課題提出的FST-PSO算法有效地避免了標準PSO算法陷入早熟問題,提高了算法的收斂精度,證實了算法的有效性。相較于常規(guī)PID控制、STD-PSO算法控制,F(xiàn)ST-PSO算法具有超調(diào)量小、響應速度快、魯棒性強的優(yōu)點。在實際應用中,槽體液位控制精度高、偏差較小,實現(xiàn)了算法收斂與工程需求的結合。
猜你喜歡
機床與液壓(2022年12期)2022-09-15 06:26:06
石油工業(yè)技術監(jiān)督(2022年7期)2022-08-18 03:28:54
選煤技術(2021年3期)2021-10-13 07:33:38
測控技術(2018年12期)2018-11-25 09:37:22
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
設備管理與維修(2016年5期)2016-03-16 02:20:47
汽車維護與修理(2015年2期)2015-02-28 12:15:41
中國機械(2014年13期)2014-04-29 23:07:03