多關節機械臂軌跡跟蹤自適應神經網絡滑模控制
2018-12-28 04:41:52張愛華
自動化儀表 2018年12期
錢 前,張愛華
(上海工程技術大學機械與汽車工程學院,上海 201620)
0 引言
機械臂控制系統具有強耦合性和復雜的非線性,系統中存在的不確定干擾和建模誤差會降低控制性能。傳統的控制方法難以保證控制效果和控制精度[1-2]。滑模控制通過控制量的切換,使系統狀態能夠沿著滑模面運動,具有對外部擾動以及參數變化的高度適應等優點。徑向基函數(radial basis function,RBF)神經網絡控制具有對任意不確定非線性函數逼近的優點。因此,具有強魯棒性滑模控制與神經網絡控制相結合的方法廣泛應用于機械臂控制系統[3-10]。
本文提出一種自適應神經網絡滑模控制方法,對滑模控制添加指數趨近律,并使用RBF網絡逼近不確定項。為了更好地削弱因誤差而引起的抖振、提高系統魯棒性,添加了一個神經網絡逼近誤差自適應補償控制項。采用李雅普諾夫穩定性理論證明系統的穩定性,并通過仿真驗證了該方法的有效性。
1 多關節機械臂數學模型
對于n關節的機械臂,考慮外界擾動和建模誤差影響,并利用拉格朗日方程建立機械臂數學模型[11-12]:

(1)

(2)
2 自適應神經網絡滑模控制器
2.1 滑模控制器

n關節機械臂系統的跟蹤誤差表示為:
(3)
設計滑模面:
(4)
式中:Λ=diag{λ1,λ2,…,λn},λ1,λ2,…,λn>0。
對式(4)求微分:

(5)
設計控制變量:
(6)
為滑模添加指數趨近律,令:

(7)
式中:η>0;k>0。
根據等價控制設計控制器:
u(t)=u1+u2
(8)
(9)
將式(6)、式(7)和式(8)代入式(5),得到:

(10)
選擇李雅普諾夫函數:
(11)
對其求微分,并代入式(10),得到:

(12)
根據李雅普諾夫穩定性理論可知,系統是全局穩定的。
2.2 自適應神經網絡滑模控制器

(13)


(14)
式中:φ(x)=[φ1,φ2,…,φn] 為高斯基函數的輸出;g(x)=exp(-x)為高斯基函數;ci、σi為高斯基函數的中心值和基寬;θ為神經網絡權值。
定義ζ為神經網絡逼近存在誤差,則有:
(15)

設計神經網絡權值的自適應律,為:
(16)
式中:Γ∈Rn×n為調整系數。
由于此處存在學習誤差,特別當網絡結點較少時會出現較大誤差,故重新設計自適應神經網絡滑模控制律為u=u1+u2+u3。
(17)
式中:u3為神經網絡逼近誤差的自適應補償控制項。
(18)

對RBF網絡逼近時,作以下合理假設。
假設1 RBF網絡逼近存在一個最優權值θ*,使:
ρ(t)=θ*Tφ(x)+ε
(19)
假設2 RBF網絡的輸出是連續的,并且存在一個特別小的實數ε0,使式(20)成立:
(20)
3 穩定性分析
定義理想的逼近權值為θ*,有:
(21)
選擇RBF網絡理想逼近誤差,為:
ρ(t)-ρ(x,θ*)=w*
(22)
最佳逼近權值與實時權值誤差為:
(23)
補償誤差的自適應控制器的誤差為:
(24)
選擇李雅普諾夫函數為:
(25)
求微分可得:
(26)

4 仿真研究

(27)
(28)
(29)

RBF神經網絡采用5個輸入單元、7個中間單元、2個輸出單元的結構。其中:基寬b=2,c=[-3 -2 -1 0 1 2 3] ,自適應調節矩陣為Γ=diag{5,5}。控制器中參數如下:η=0.8,k=diag(50,50),rw=1。設定仿真時間為10 s,仿真步長為0.01 s,進行相關仿真。
圖1與圖2為無擾動的雙關節軌跡跟蹤與角速度跟蹤圖。從圖2可以看出,系統能以一定速度收斂到平衡點,大大削弱因干擾而引起的抖振,同時能實現良好的軌跡跟蹤與角速度跟蹤。
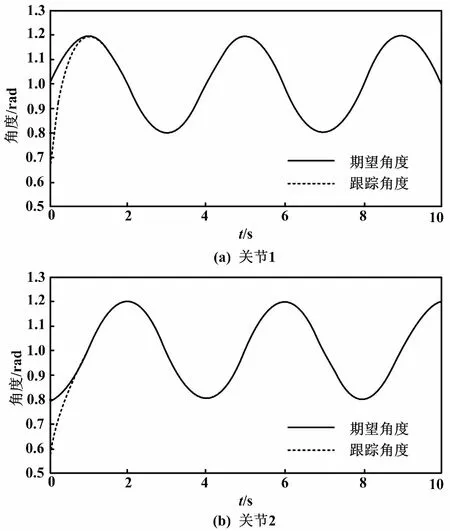
圖1 雙關節軌跡跟蹤圖(無外部擾動)
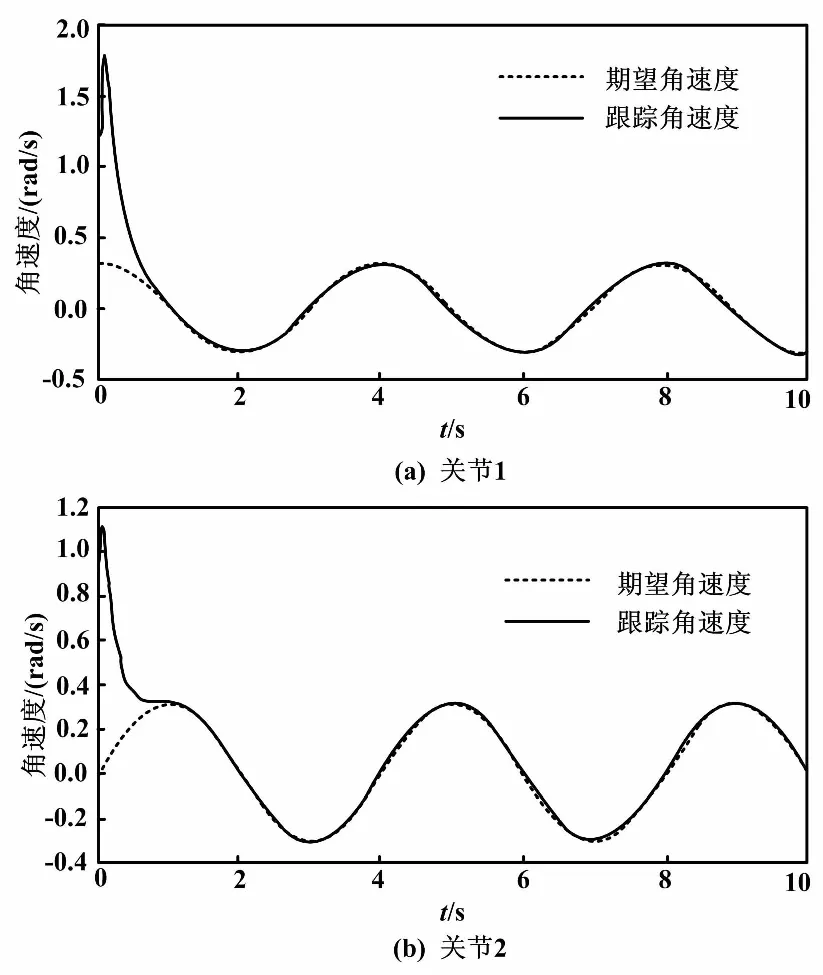
圖2 雙關節角速度跟蹤圖(無外部擾動)
圖3為無擾動的雙關節控制力矩圖。從圖3可看出,系統對關節的控制力矩平穩,幾乎無抖振,可避免機器因抖振而損壞。

圖3 雙關節控制力矩圖(無外部擾動)
圖4與圖5為加強外部擾動情況下的雙關節軌跡跟蹤與角速度跟蹤圖。從圖4和圖5可以看出,系統在加強外部擾動情況下,仍可保持良好平穩的軌跡跟蹤與角速度跟蹤。
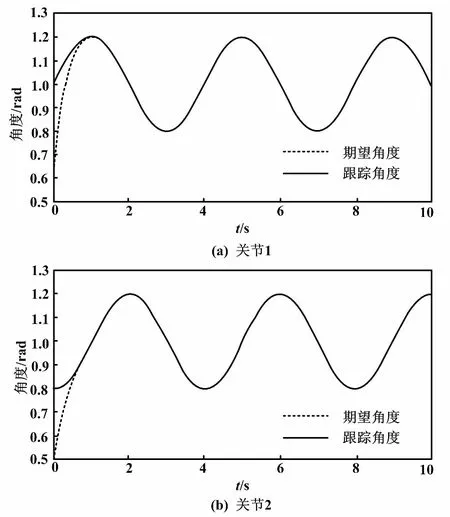
圖4 雙關節軌跡跟蹤圖(有外部擾動)
圖6為加強外部擾動情況下雙關節的控制力矩圖。從圖6可以看出系統對關節的控制力矩仍然保持平穩,雖在3.5~4 s之間出現輕微抖振現象,但可通過本文提出的控制方法進行自適應調節,達到良好的抑制效果。
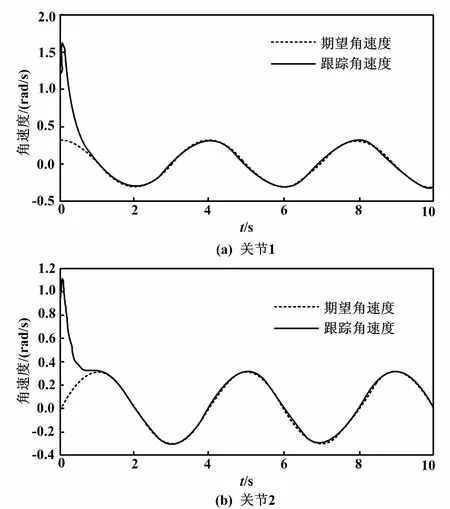
圖5 雙關節角速度跟蹤圖(有外部擾動)
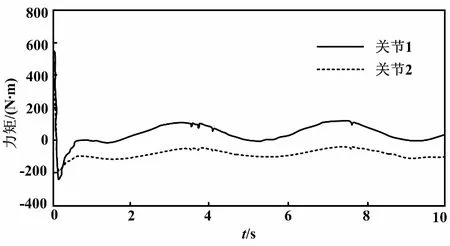
圖6 雙關節控制力矩圖(有外部擾動)
5 結束語
本文提出了一種自適應神經網絡滑模控制算法,可解決存在不確定性和系統建模誤差的多關節機械臂跟蹤控制問題。通過自適應項改進神經網絡對不確定項ρ(t)的逼近效果,并引入指數趨近率,改善了控制器的響應速度;通過李雅普諾夫穩定性理論,證明了系統的穩定性;通過調節參數,保證了系統的穩定性。MATLAB仿真試驗表明,當外部擾動變大時,控制算法可以實現對期望軌跡的穩定跟蹤,具有較好穩定性與魯棒性。
