基于磁感應(yīng)的油藏裂縫內(nèi)地下無線傳感網(wǎng)絡(luò)定位*
2018-12-26 12:53:06郭會軍李維勤林遂芳
傳感技術(shù)學(xué)報 2018年12期
郭會軍,李維勤,林遂芳
(西安理工大學(xué)自動化與信息工程學(xué)院,西安 710048)
目前全球能源處于石油向清潔能源過渡的時代,原油和天然氣在世界一次能源消費(fèi)結(jié)構(gòu)中占比呈下降趨勢(仍超過50%)。但是隨著能源需求的不斷增長,再加上較低的油藏采收率(≤60%),可用的油藏消耗速度仍然日益加快。在節(jié)能減排的背景下,提高油藏的采收率對于保障能源安全具有重要意義[1]。
提高采收率需要對油氣田開發(fā)管理規(guī)劃和開采工藝措施進(jìn)行優(yōu)化,需要實(shí)時獲取整個油藏的物理化學(xué)參數(shù),如壓力、溫度和流體類型等,但是目前尚缺乏能直接深入油藏內(nèi)部進(jìn)行實(shí)時在線監(jiān)測的有效手段。考慮到油藏開發(fā)中常運(yùn)用水力壓裂技術(shù)在井筒和目標(biāo)巖層之間產(chǎn)生若干既窄又長的裂縫,作為油藏和井筒之間的流體通路,通訊方式和定位穿過裂縫進(jìn)入油藏的傳感器節(jié)點(diǎn)成為實(shí)現(xiàn)分布式測量的難點(diǎn)。文獻(xiàn)[2]于2006年首次提出了基于磁感應(yīng)通信的地下無線傳感網(wǎng)絡(luò),開辟了研究油藏參數(shù)分布式測量的新領(lǐng)域。此后,學(xué)者們在傳感器的微型化、節(jié)點(diǎn)無線充電、信道建模、通信協(xié)議和節(jié)點(diǎn)定位等方面展開了研究工作,其中節(jié)點(diǎn)定位是否準(zhǔn)確是制約實(shí)施油藏參數(shù)分布式測量的重要環(huán)節(jié)[2-5]。
地下無線傳感網(wǎng)絡(luò)中,環(huán)境和通信距離的限制使得錨節(jié)點(diǎn)整體比例很低,傳感器節(jié)點(diǎn)鄰居錨節(jié)點(diǎn)數(shù)往往少于3個以至沒有,常規(guī)無線傳感網(wǎng)絡(luò)節(jié)點(diǎn)定位方法[6-8]已無法適用這種情況。此外,節(jié)點(diǎn)間距離估計還受線圈方向、節(jié)點(diǎn)周邊外界磁場變化等因素影響[9]。為此文獻(xiàn)[10]研究了2-D環(huán)境下信標(biāo)位置固定,基于磁感應(yīng)通信的移動節(jié)點(diǎn)定位。文獻(xiàn)[11]研究了2-D環(huán)境下參考節(jié)點(diǎn)位置固定,基于阻抗測量的節(jié)點(diǎn)定位。文獻(xiàn)[12]采用3方向通信線圈,研究了3-D環(huán)境下地下無線傳感網(wǎng)絡(luò)的節(jié)點(diǎn)定位,并且采用了極大似然函數(shù)來估計節(jié)點(diǎn)位置。文獻(xiàn)[13]通過半定規(guī)劃結(jié)合共軛梯度法SDP+CGA(Semi-Definite Programming Enhanced Conjugate Gradient Algorithm)的優(yōu)化計算,得到隨機(jī)分布的基于磁感應(yīng)通信的地下無線傳感網(wǎng)絡(luò)的節(jié)點(diǎn)位置。但是上述方法不僅誤差普遍較大,而且應(yīng)用條件嚴(yán)格,不便于實(shí)際使用。同時油藏環(huán)境特殊不適宜在其內(nèi)布置錨節(jié)點(diǎn),錨節(jié)點(diǎn)比例偏低使得定位問題更為復(fù)雜。
考慮到油藏裂縫中節(jié)點(diǎn)定位的特殊性,本文提出了一種基于接收信號磁感應(yīng)強(qiáng)度的兩步式節(jié)點(diǎn)定位方法。文中兩個錨節(jié)點(diǎn)部署在井筒,傳感器節(jié)點(diǎn)隨機(jī)分布在裂縫內(nèi),節(jié)點(diǎn)間均采用三方向線圈天線通信,節(jié)點(diǎn)距離依據(jù)接收磁感應(yīng)強(qiáng)度進(jìn)行估計。然后將定位轉(zhuǎn)換為半定規(guī)劃問題,采用可變方向增強(qiáng)拉格朗日方法ADM(Alternating Direction Augmented Lagrangian Method)進(jìn)行求解,在此基礎(chǔ)上引入粒子群優(yōu)化算法在節(jié)點(diǎn)小鄰域內(nèi)精細(xì)搜索獲得最優(yōu)定位,最后通過仿真對算法的性能進(jìn)行了分析比較。
1 根據(jù)磁感應(yīng)強(qiáng)度測量節(jié)點(diǎn)間距離原理
水力壓裂技術(shù)產(chǎn)生的裂縫長度通常可達(dá)100 m,寬度和長度分別為0.01 m和1 m。為了對油層進(jìn)行分布式測量,微納傳感節(jié)點(diǎn)混在攜砂液中(含石英砂)隨壓裂進(jìn)程進(jìn)入裂縫,其在裂縫中的位置因而是隨機(jī)分布的[4]。體積和功率較大的錨節(jié)點(diǎn)通常布置于井筒內(nèi)部,由外部電源供電,可直接與裂縫內(nèi)的傳感器節(jié)點(diǎn)進(jìn)行磁感應(yīng)通信,錨節(jié)點(diǎn)同時通過磁感應(yīng)方式為傳感節(jié)點(diǎn)提供電能;微納尺寸的傳感器節(jié)點(diǎn)具有全向線圈天線,同時配置超級電容器儲存耦合電能。考慮到供電及傳感器通信能力等因素,在面向油藏裂縫的地下無線傳感網(wǎng)絡(luò)中,錨節(jié)點(diǎn)和傳感節(jié)點(diǎn)之間通信(下行鏈路)是單跳方式,傳感節(jié)點(diǎn)與錨節(jié)點(diǎn)之間通信(上行鏈路)采用多跳方式[5]。

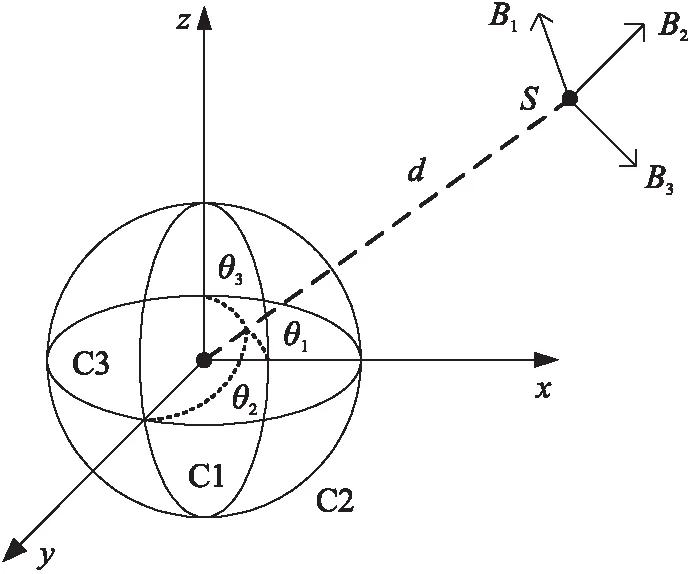
圖1 發(fā)射線圈及其磁場
令Bk表示第k個發(fā)送線圈在節(jié)點(diǎn)S處產(chǎn)生的磁通密度,θk表示S與xyz軸的極角。當(dāng)距離d遠(yuǎn)大于4倍的線圈半徑時,S處的磁通密度為
(1)
式中:Bkr與Bkt分別表示磁通密度的徑向和軸向分量,μ是磁導(dǎo)率。M表示電流所產(chǎn)生磁矩的幅值,可由下式確定
M=NIAF
(2)
式中:N和A分別表示線圈的匝數(shù)和線圈的面積,F表示垂直線圈所在平面的單位矢量。
由式(1)可知總的磁通密度Bk為
(3)
將式(3)兩邊平方且代入式(1)可得
(4)
式中:
(5)
假設(shè)已知Bk,則
(6)
同時S的3個極角滿足
cos2θ1+cos2θ2+cos2θ3=1
(7)
將式(6)代入式(7)可得
(8)
則距離d可表示為
(9)
當(dāng)3個發(fā)送線圈具有相同的磁矩幅值,即Mk=M時易知Ck=C,則式(9)可簡化為
(10)
令
(11)
則最終的距離估計簡化為
(12)
而在S處,第k個發(fā)送線圈產(chǎn)生的磁通密度被3個接收線圈測量,其值為
(13)
式中:下標(biāo)1,2,3表示互相正交的3個接收線圈,當(dāng)忽略損耗時易得
Bkx=Bk
(14)
可知3個接收線圈測量的磁通密度為常值,與其方向無關(guān),從而有利于節(jié)點(diǎn)布置。這樣根據(jù)接收線圈的磁場測量值由式(13)和式(12)即可確定其與錨節(jié)點(diǎn)之間的距離,節(jié)點(diǎn)之間距離也可采用這種方式測定。
2 基于ADM的節(jié)點(diǎn)初始定位
2.1 節(jié)點(diǎn)接收信號磁通密度的估計
考慮在水力壓裂產(chǎn)生的裂縫中存在N個位置隨機(jī)的傳感器節(jié)點(diǎn){xi∈R2:1≤i≤N},同時存在K個位置已知的錨節(jié)點(diǎn){ai∈R2:1≤k≤K}。令傳感器節(jié)點(diǎn)i與其鄰居節(jié)點(diǎn)NHi之間距離為
{dij∈R:1≤i≤N,j∈NHi}
(15)
傳感器節(jié)點(diǎn)i與錨節(jié)點(diǎn)之間的距離為
{dik∈R:1≤i≤N,1≤k≤K}
(16)
令Brms1,…,Brmsn表示傳感節(jié)點(diǎn)接收的n個磁通密度信號樣本,假設(shè)它們是獨(dú)立同分布均值為(方差為(2的高斯變量。定義如下似然函數(shù)
(17)
其對數(shù)型似然函數(shù)為
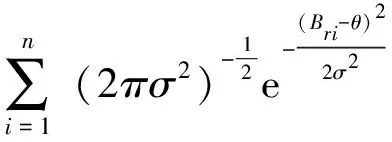
(18)
則均值θ的極大似然估計為
(19)
簡單推導(dǎo)后可得
(20)
上式表明可以從m個接收信號樣本中對參數(shù)(進(jìn)行極大似然估計,估計結(jié)果實(shí)際為m個接收樣本的均值,且為無偏估計。基于接收信號強(qiáng)度(的無偏估計,根據(jù)式(12)可對收發(fā)節(jié)點(diǎn)之間的距離d進(jìn)行估計。
2.2 節(jié)點(diǎn)定位問題的半定規(guī)劃表示
定義傳感器節(jié)點(diǎn)i與鄰居節(jié)點(diǎn)j之間距離估計誤差,傳感器節(jié)點(diǎn)i與信標(biāo)節(jié)點(diǎn)k之間距離估計誤差分別為
(21)
(22)

(23)
易知f(X)為凸函數(shù)[14],半定松弛之后將其轉(zhuǎn)化為如下的半定規(guī)劃問題
(24)
(25)
Y-XTX0
(26)
式中ei和ej為單位列矢量,I表示單位陣,Y∈RN*N為實(shí)對稱矩陣。
2.3 基于ADM的節(jié)點(diǎn)初始定位
式(24)所示半定規(guī)劃屬于高維問題,約束條件數(shù)目趨近待優(yōu)化參數(shù)的階數(shù),基于內(nèi)點(diǎn)的傳統(tǒng)迭代法求解時不僅計算時間長而且存儲繁瑣,文獻(xiàn)[14]指出ADM方法能夠在求解高維半定規(guī)劃問題的同時,大幅減少計算量和存儲需求。為此將式(25)重新整理為如下的矩陣形式

(27)
式中:
(28)
(29)
(30)

(31)
此時A(Z)為Z的線性映射,同時定義
(32)
則原問題轉(zhuǎn)化為如下二次型半定規(guī)劃問題
(33)
假設(shè)矩陣A行滿秩,定義如下增強(qiáng)拉格朗日函數(shù)
(34)

(35)
(36)
(37)
迭代若干步后,即可獲得全部節(jié)點(diǎn)位置的初步估計值,而關(guān)于算法的全局收斂可參考文獻(xiàn)[15]。
3 基于粒子群算法的精確定位
上述半定規(guī)劃將求解從低維空間轉(zhuǎn)化到了高維空間,ADM算法獲得的解與真實(shí)值之間仍然存在相當(dāng)?shù)恼`差[13,15]。為了獲得更好的位置估計,有必要引入更為精細(xì)的尋優(yōu)算法。倘若在以ADM算法所獲估計值為圓心,半徑不超過節(jié)點(diǎn)通信半徑的圓形區(qū)域內(nèi)進(jìn)一步搜索尋優(yōu),有可能獲得誤差更小的位置估計。相比其他搜索尋優(yōu)算法,粒子群算法PSO(Particle Swarm Algorithm)在具有較強(qiáng)的搜索能力的前提下,涉及參數(shù)較少且實(shí)現(xiàn)簡單[16],適宜用于本文所述情形。
定義如下目標(biāo)函數(shù)
(38)

(39)
(40)
(41)

4 仿真分析與性能評估
采用MATLAB對本文算法進(jìn)行了仿真和驗(yàn)證,并與ADM+CGA算法結(jié)果進(jìn)行比較。兩個錨節(jié)點(diǎn)布置在鉆井井筒中固定位置,傳感器節(jié)點(diǎn)隨機(jī)散布在裂縫中,裂縫內(nèi)部沒有錨節(jié)點(diǎn)。如前所述水力壓裂工藝產(chǎn)生的裂縫寬度很小,混在攜砂液(起支撐裂縫作用)進(jìn)入裂縫內(nèi)部的傳感器節(jié)點(diǎn)定位問題等效為平面內(nèi)節(jié)點(diǎn)定位問題。為了研究噪聲引起的磁場測量誤差對定位的影響,利用距離測量誤差取代磁場測量誤差,觀察相對定位誤差隨距離測量誤差的變化。引入噪聲因子nf∈[0,1]反映距離測量噪聲方差大小,包含測量誤差的距離估計可表示為
(42)

(43)

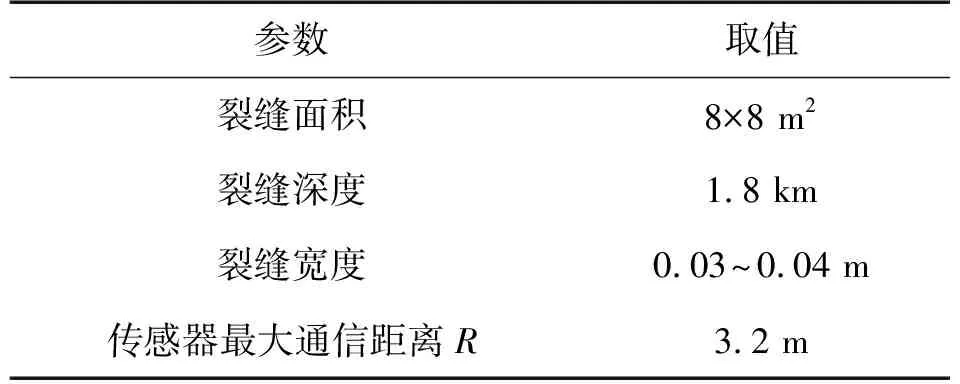
表1 仿真參數(shù)
在nf=0.5和傳感器節(jié)點(diǎn)數(shù)為50的情況下,首先采用ADM算法進(jìn)行了初始定位,結(jié)果如圖2所示,可見存在較顯著的定位誤差(ERA=6.923 7)。而后以ADM定位作為初值,分別采用CGA算法和PSO算法進(jìn)行了精確定位。圖3和圖4分別為CGA算法和PSO算法定位結(jié)果,其相對定位誤差分別為0.577 1和0.587 1,與圖2對比可見定位精度獲得顯著提升。
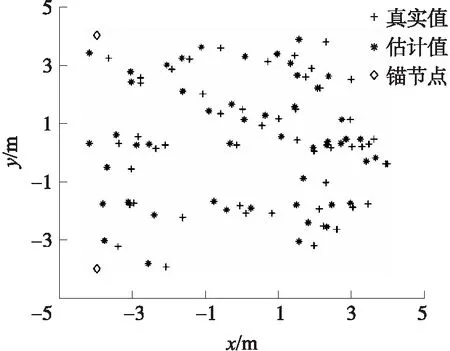
圖2 ADM算法定位
然后在不同的傳感器節(jié)點(diǎn)數(shù)量(傳感器節(jié)點(diǎn)從50~100,步長10)和不同的距離測量噪聲強(qiáng)度nf(0.05~0.60)的情況下,觀察本文算法和ADM+CGA算法的相對定位誤差,結(jié)果如圖5和圖6所示。
圖5表明在錨節(jié)點(diǎn)數(shù)量為2,通信距離固定條件下,ADM+CGA和ADM+PSO算法的定位誤差隨著傳感器節(jié)點(diǎn)的增加均呈下降趨勢,ADM+PSO算法略優(yōu)于ADM+CGA算法。從圖6可以看出,在錨節(jié)點(diǎn)為2,傳感器節(jié)點(diǎn)為60,通信距離為3.2 m場景下,隨著噪聲強(qiáng)度從低到高的增加,ADM+CGA和ADM+PSO算法的定位誤差均逐漸變大,但是ADM+PSO算法結(jié)果仍優(yōu)于ADM+CGA算法。
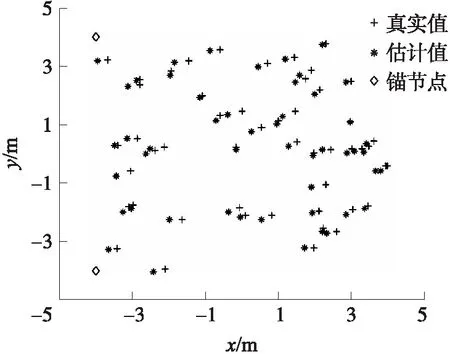
圖3 ADM+CGA算法定位
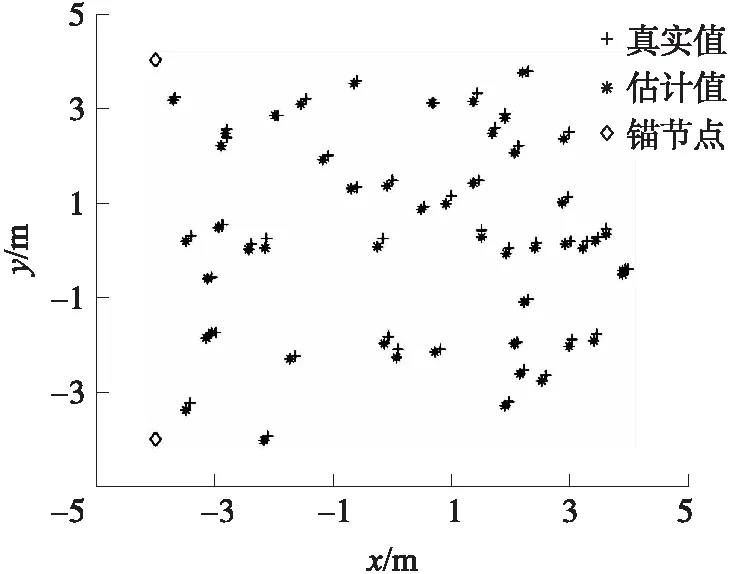
圖4 ADM+PSO算法定位
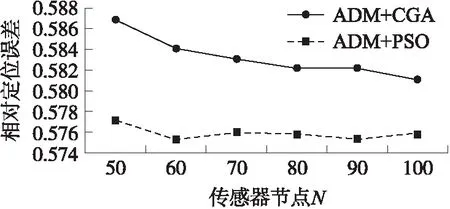
圖5 相對定位誤差隨傳感器節(jié)點(diǎn)數(shù)變化
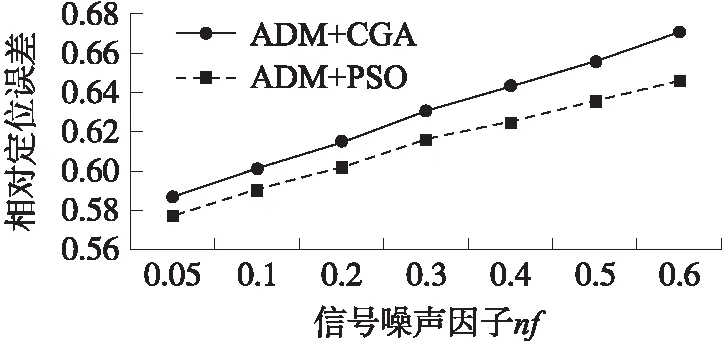
圖6 相對定位誤差隨噪聲變化
5 結(jié)論
對于錨節(jié)點(diǎn)布置在井筒,傳感器節(jié)點(diǎn)隨機(jī)分布于油藏裂縫條件下的地下無線網(wǎng)絡(luò)節(jié)點(diǎn)定位,可從節(jié)點(diǎn)接收信號的磁感應(yīng)強(qiáng)度中估計出其與鄰居節(jié)點(diǎn)和錨節(jié)點(diǎn)的距離,在此基礎(chǔ)上將定位問題轉(zhuǎn)換為半定規(guī)劃問題,利用變方向增強(qiáng)拉格朗日方法和粒子群優(yōu)化算法結(jié)合的方法可獲得較好的定位結(jié)果。仿真結(jié)果也表明,本文方法優(yōu)于ADM+CGA方法。