帕金森手部消顫電路設計
2018-12-05 06:48:30李鎮洵蔡有杰王梓明馮宇琛
現代鹽化工 2018年5期
李鎮洵,蔡有杰,遲 卓,王梓明,馮宇琛
(齊齊哈爾大學 機電工程學院,黑龍江 齊齊哈爾 161000)
1 帕金森概述
帕金森(Idiopathic Parkinson’s Disease,PD)簡稱Parkinson病,也稱為震顫麻痹,是一種中老年人常見的神經系統變性疾病,也是中老年人最常見的錐體外系疾病,慢性進展性病程。該病癥狀主要表現為:靜止性震顫、動作遲緩及減少、姿勢不穩、平衡障礙等,嚴重影響日常生活和工作[1-2]。
典型癥狀表現為“搓丸樣”震顫,震顫頻率在4~6 Hz左右,帕金森病病因尚不明確,無法根治,只能由藥物治療、運動療法、手術治療、心理疏導及照料護理等治療手段盡量控制病情惡化[3-6]。
目前,帕金森癥尚無有效治愈的辦法,大多數患者只能采用藥物或物理治療延緩病癥,本實驗所設計的帕金森手部消顫電路,通過微小振動,可暫時性相對抵消手部顫動,使手部達到相對靜止的狀態而平穩地活動,與以往化學治療的方式相比,它是通過物理治療的方法解決了帕金森患者手抖的問題,因此成效比藥物來得快而且極具安全性[7]。
2 系統總體設計
該系統采用嵌入式技術,系統自主檢測患者手臂顫抖產生振動頻率和幅度,從而來調節微型振動馬達的頻率。控制系統采用單片機89C52為核心,實時控制微型振動馬達振動狀態,使馬達的振動頻率與帕金森患者手抖頻率基本保持一致,控制系統采用閉環控制設計,從而使得手部的顫抖與馬達震動進行協顫運動,保持相對穩定狀態。系統采用加速度傳感器檢測患者手部震顫頻率;手部震顫頻率屬于低頻信號,容易受外界干擾,設計低通濾波器對信號進行濾波;選用8位ADC實現信號的數模轉換。系統整體設計如圖1所示。
3 震顫信號檢測電路設計
震顫信號頻率、幅度的檢測是該電路設計的關鍵,其頻率、幅度直接影響振動電機工作狀態。震顫信號可利用生物信號傳感器、光電信號傳感器和機械信號傳感器進行檢測[8]。
帕金森典型癥狀表現為“搓丸樣”震顫,此震顫行為是較為復雜的運動過程,震顫信號是一個疊加式的信號,其頻率一般在一定范圍內變化,在 4~6 Hz 。本實驗所采用的震顫信號采集電路為角速度傳感器與陀螺儀組合的形式。加速度傳感器可以測量X,Y,Z 3個軸方向的加速度;陀螺儀可以測得角速度的相應變化[9-10]。
為滿足上述功能,檢測電路采用JY901九軸陀螺儀模塊,該模塊集成了高精度的陀螺儀、角速度傳感器,姿態測量精度0.05度;具有優越的數字濾波功能,起到低通濾波器的作用,有效降低檢測時的噪聲;具有4路擴展端口,兩種輸入、兩種輸出,可根據功能需求配置不同模式:模擬量輸入、數字量輸入、數字量輸出、PWM輸出。本電路設計采用數字量輸出模式,與單片機采用I2C總線進行連接,如圖2所示,I2C總線通過一個4.7 K的電阻上拉到VCC。
4 振動馬達驅動電路設計
為減小整體設備體積與質量,采用微型振動馬達實現振動功能,此微型振動馬達屬于直流有刷電機。在振動馬達軸面上有一個偏心輪,當馬達正常工作時,由于偏心輪圓心質點未在電機專心上,所以馬達始終處于失衡狀態,從而產生震動。控制系統不能直接驅動振動馬達,需要功率電路來擴展輸出電流,用以滿足振動馬達正常工作。本文中采用由三極管(NPN型8050、PNP型8550)和二極管(1N4007)組成的H型PWM驅動電路,此驅動電路響應時間短,調速范圍較廣,并且過載能力較強,如圖3所示,M1-DC和M2-DC分別與單片機I/O引腳P1.0、P1.1相連接,圖中“振動馬達”處為連接電機兩引腳。
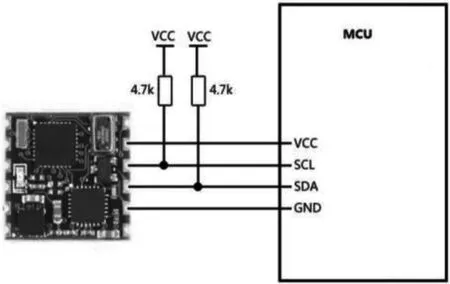
圖2 JY901模塊與單片機連接圖

圖3 微型振動馬達驅動電路
5 調速控制
本設計調速方案是通過控制三極管導通狀態,從而調節驅動電壓脈沖寬度的方式進行精確調整電動機轉速。PWM調速采用單極性工作方式,其電流波動較小,當振動馬達正常工作時,使單片機P1.0引腳或P1.1引腳置低電平,另一引腳輸出PWM信號,通過控制兩引腳的輸出狀態,即控制占空比狀態,即可調節振動馬達的轉速。為提高精度,程序上采用定時器控制脈沖寬度,部分代碼為:


6 結語
本實驗通過查閱相關文獻、資料,分析帕金森患者手部震顫頻率等數據特點,結合嵌入式技術,設計了消顫電路,主要包括:震顫信號檢測電路和振動馬達驅動電路。電路設計結構緊湊,能夠實現震顫信號的高精度采集,電路采用閉環控制,驅動電路可以實時完成振動馬達的調速,用以對患者震顫的消除。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
