基于PSO與模糊PI控制結(jié)合的最大風(fēng)能捕獲研究
2018-11-30 01:46:52任志玲楊永偉孫雪飛
計(jì)算機(jī)應(yīng)用與軟件 2018年11期
關(guān)鍵詞:風(fēng)速
任志玲 楊永偉 孫雪飛
(遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院 遼寧 葫蘆島 125105)
0 引 言
風(fēng)能是一種安全、清潔,無污染的能源。目前全世界約有75個(gè)國家擁有商用風(fēng)力發(fā)電裝置,其中22個(gè)國家使用的風(fēng)力發(fā)電機(jī)裝機(jī)容量已超過1千兆瓦級。為了實(shí)現(xiàn)風(fēng)能的最大捕獲,學(xué)者們提出了許多的控制方法,如文獻(xiàn)[1]中將PI與SMC的結(jié)合,模型預(yù)測控制(MPC)簡化計(jì)算,并將模糊控制器嵌入模型參考自適應(yīng)控制框架,但由于風(fēng)速的突變并不能達(dá)到功率實(shí)時(shí)跟蹤。文獻(xiàn)[2]中將模糊模型和神經(jīng)網(wǎng)絡(luò)相結(jié)合,對變速風(fēng)力發(fā)電機(jī)的MPPT進(jìn)行了研究,雖實(shí)現(xiàn)了風(fēng)能的捕獲,但風(fēng)能利用系數(shù)較低。文獻(xiàn)[3]中介紹了前饋氣動力矩控制器(ATF)跟蹤最優(yōu)發(fā)電機(jī)轉(zhuǎn)速,但是跟蹤效果并不佳。文獻(xiàn)[4]中考慮了范德霍文風(fēng)模型分別針對高、低頻設(shè)計(jì)了LQG控制器和PI控制器,但是轉(zhuǎn)矩出現(xiàn)波動較大。文獻(xiàn)[5]提出了一種基于永磁同步發(fā)電機(jī)爬山搜索(HCS)的Wilcoxon徑向基函數(shù)網(wǎng)絡(luò)MPPT策略,但是步長的選取需要經(jīng)過多次嘗試,功率和轉(zhuǎn)矩變化響應(yīng)時(shí)間較長。本文提出了一種基于粒子群優(yōu)化(PSO)算法和最優(yōu)模糊PI控制器,以最大限度地實(shí)現(xiàn)風(fēng)能捕獲。根據(jù)不同風(fēng)速下粒子群算法對低負(fù)荷區(qū)域的模糊隸屬函數(shù)進(jìn)行調(diào)整,利用增益同步控制器得到各風(fēng)速優(yōu)化的PI增益,該P(yáng)I控制器保證了最佳葉尖比。將該策略應(yīng)用于5 MW風(fēng)力機(jī)中,并與ATF和CMPPT兩種控制策略進(jìn)行參數(shù)比較,實(shí)驗(yàn)結(jié)果表明本策略具有實(shí)時(shí)跟蹤風(fēng)速變化引起的轉(zhuǎn)速、轉(zhuǎn)矩和功率的變化,在低負(fù)荷區(qū)域具有明顯跟蹤、響應(yīng)快等特點(diǎn)。
1 風(fēng)力機(jī)模型
圖1表示風(fēng)力發(fā)電系統(tǒng)的簡易模型圖,風(fēng)速吹動風(fēng)力機(jī)旋轉(zhuǎn)獲得的直接功率數(shù)學(xué)模型為:
Pv=0.5ρAv3
(1)
式中:A表示風(fēng)掃過風(fēng)輪的有效面積,v表示風(fēng)速,ρ表示空氣密度,一般取1.225 kg/m2。
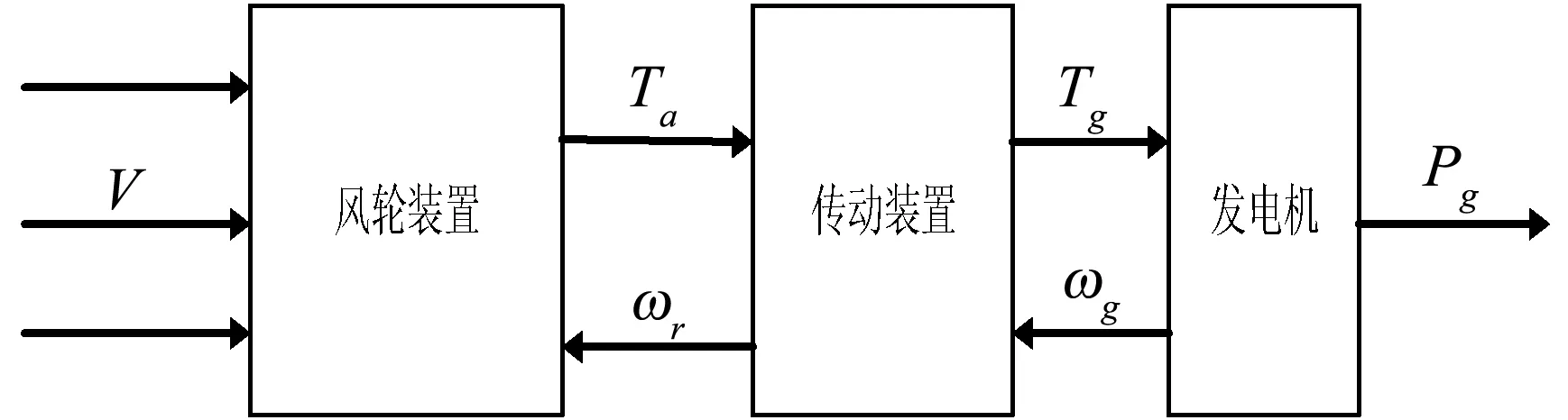
圖1 風(fēng)力發(fā)電系統(tǒng)框圖
葉尖比的表達(dá)式為:
(2)
式中:ωr表示風(fēng)輪角速度,R表示風(fēng)力機(jī)的半徑。
為了表示實(shí)際風(fēng)能捕獲的效率,引入風(fēng)能利用CP,最大風(fēng)能利用系數(shù)Cp采用如下表達(dá)式:
(3)
根據(jù)式(3)得到圖2所示的風(fēng)能利用系數(shù)曲線圖。

圖2 最大風(fēng)能利用系數(shù)曲線
風(fēng)力機(jī)捕獲的功率、轉(zhuǎn)矩方程為:
(4)
式中:Pa表示風(fēng)力機(jī)的輸出功率,Ta表示風(fēng)力機(jī)產(chǎn)生的轉(zhuǎn)矩,ωr表示風(fēng)力機(jī)角速度。
根據(jù)圖3得到傳動數(shù)學(xué)模型[6]:
(5)
式中:θr、θls、ωls、θg分別為轉(zhuǎn)子側(cè)偏差角、變速箱側(cè)偏差角、低速軸偏差角、發(fā)電機(jī)側(cè)偏差角;Ta、Tls、Ths、Tg分別表示風(fēng)輪轉(zhuǎn)矩、低速軸轉(zhuǎn)矩、高速軸轉(zhuǎn)矩、發(fā)電機(jī)的力矩;風(fēng)力機(jī)傳動比n:
(6)

圖3 二質(zhì)量傳動模型
文獻(xiàn)[6]中轉(zhuǎn)矩表達(dá)式:
(7)
從圖2可以看出當(dāng)葉片與風(fēng)向正交(槳距角β為00),最佳葉尖比λopt為7.55時(shí)Cp最大,利用最大風(fēng)能利用系數(shù)Cp(max)曲線實(shí)現(xiàn)最大風(fēng)能捕獲。為保持λopt,此時(shí)應(yīng)根據(jù)速度控制器調(diào)節(jié)轉(zhuǎn)子速度。利用傳統(tǒng)最大功率跟蹤(簡稱CMPPT)控制策略實(shí)現(xiàn)上最大風(fēng)能的捕獲[7],電磁轉(zhuǎn)矩計(jì)算公式為:
(8)

(9)
上述提出的方法稱為前饋空氣轉(zhuǎn)矩控制器(ATF),其中Kc是為減小穩(wěn)態(tài)誤差而選擇的參數(shù)。
2 最優(yōu)模糊PI控制設(shè)計(jì)
2.1 粒子群算法(PSO)
粒子群優(yōu)化算法(PSO)是通過模擬鳥群覓食行為而發(fā)展起來的一種基于群體協(xié)作的隨機(jī)搜索算法,它提供了一種基于種群的搜索過程,其中的個(gè)體稱為粒子,隨著時(shí)間而改變它們的位置(狀態(tài))。在粒子群優(yōu)化系統(tǒng)中,相當(dāng)于粒子在多維搜索空間中飛行,在飛行過程中,每個(gè)粒子根據(jù)自己的經(jīng)驗(yàn)和相鄰粒子的位置來調(diào)整最佳的位置。在粒子群算法中,每個(gè)粒子都有一個(gè)速度和位置,相應(yīng)的方程描述如下:
vi(k+1)=vi(k)+γ1i(Pi-xi(k))+γ2i(G-xi(k))
(10)
xi(k+1)=xi(k)+vi(k+1)
(11)
式中:i為粒子數(shù),k為離散時(shí)間指數(shù),vi為粒子的速度,xi為粒子的位置,Pi為粒子的最佳位置(全局最佳),G為種群(全局最佳)的最佳位置,γ1i和γ2i為粒子在區(qū)間[0,1]中的自由隨機(jī)數(shù)。在模擬中采用下列的迭代速度方程:
vi(k+1)=φ(k)vi(k)+α1[γ1i(Pi-xi(k))]+
α2[γ2i(G-xi(k))]
(12)
式中:φ(k)是慣性函數(shù),α1和α2為加速度常數(shù)。在本文中使用線性遞減策略,即最初的大慣性權(quán)重0.9線性地減少到0.1,相應(yīng)的表達(dá)式如下:
(13)
式中:NT是執(zhí)行算法的最大時(shí)間步數(shù),φ(0)是初始慣性權(quán)重,φ(NT)是后慣性權(quán)重。
粒子群算法的步驟算法如下:
步驟1初始化粒子群并隨機(jī)化每個(gè)粒子的位置和速度(xi,vi;i=1,…,M)。
步驟2計(jì)算每個(gè)粒子的適應(yīng)度函數(shù)(y(i)=適應(yīng)度(xi))。
步驟3初始化每個(gè)Pi和G,Pi0=yi,G=min(Pi0),i=1,2,…,M。
步驟4使用動態(tài)慣性權(quán)重更新粒子的速度,利用式(11)更新粒子的位置,并通過速度來控制,如下所示:
(14)
步驟5更新Pi和G;Pi=yi-new和G=min(Pi-new)。
步驟6如果不滿足結(jié)束條件轉(zhuǎn)到步驟4繼續(xù)循環(huán);否則,停止并返回參數(shù)G。
2.2 模糊PI控制設(shè)計(jì)
本文采用圖4所示的二階模糊控控制器,包括輸入數(shù)據(jù)、模糊推理、清晰化、控制作用對象等部分。如果對隸屬度函數(shù)進(jìn)行優(yōu)化調(diào)整可以達(dá)到較好的控制效果,則利用智能優(yōu)化控制方法實(shí)現(xiàn)這個(gè)目標(biāo)[9-13];通過輸入e和ec,經(jīng)過模糊歸一化,模糊推理,清晰化以后作用于控制對象,其中r表示輸入,y表示輸出。

圖4 二階模糊控制器
從系統(tǒng)的穩(wěn)定性響應(yīng)速度、超調(diào)量等方面考慮:比例系數(shù)kp可以加快系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的調(diào)節(jié)精度;kp越大系統(tǒng)響應(yīng)越快,但容易產(chǎn)生超調(diào),甚至不穩(wěn)定;較小時(shí)降低精度。積分系數(shù)ki的作用為消除系統(tǒng)靜態(tài)誤差。
系統(tǒng)誤差e和誤差變化率ec論域?yàn)閇-6,6],kp論域?yàn)閇-2,2],ki論域?yàn)閇-1,1],隸屬度函數(shù)采用三角型函數(shù),模糊子集均為{NB,NM,NS,ZE,PS,PM,PB},去模糊法為去重心法。根據(jù)各模糊子集的隸屬度賦值表和各參數(shù)模糊控制模型,應(yīng)用模糊合成推理設(shè)計(jì)PI參數(shù)的模糊矩陣表,如表1、表2所示,并查出修正參數(shù)帶入下式計(jì)算:

(15)
表2 ki模糊規(guī)則表
3 控制原理分析
本文提出的基于PSO群算法的最優(yōu)模糊PI控制器對任意風(fēng)速剖面都能實(shí)現(xiàn)風(fēng)能的最大捕獲。該方法分為兩個(gè)階段,如圖5、圖6所示。

圖5 第一階段(PSO控制)

圖6 第二階段(模糊PI控制)

(16)
式中:s是Laplace變量因子,本文α選取0.01。
4 仿真結(jié)果分析
將本策略提出的控制器應(yīng)用于一個(gè)5 MW風(fēng)力機(jī)模型,在MATLAB/Simiulink仿真軟件中設(shè)置參數(shù),相關(guān)參數(shù)設(shè)置如表3、表4所示。表5為不同風(fēng)速下采用粒子群優(yōu)化后的Kp、Ki參數(shù)。
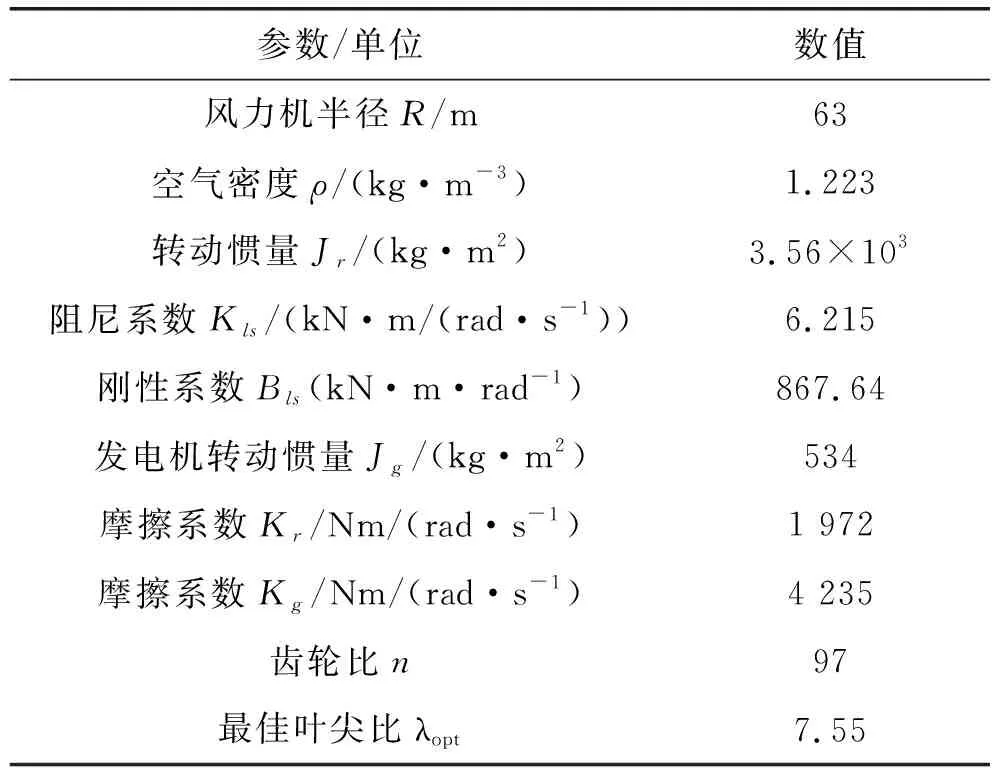
表3 5 MW風(fēng)力機(jī)參數(shù)

表4 PSO算法參數(shù)

表5 PSO算法優(yōu)化后的Kp、Ki
為便于分析,設(shè)定仿真時(shí)間為300 s,采用圖7所示的組合風(fēng)速進(jìn)行模擬,運(yùn)行仿真得到與CMPPT和ATF控制策略的比較結(jié)果如圖8-圖11所示。
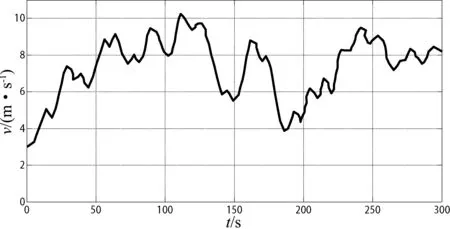
圖7 模擬風(fēng)速曲線
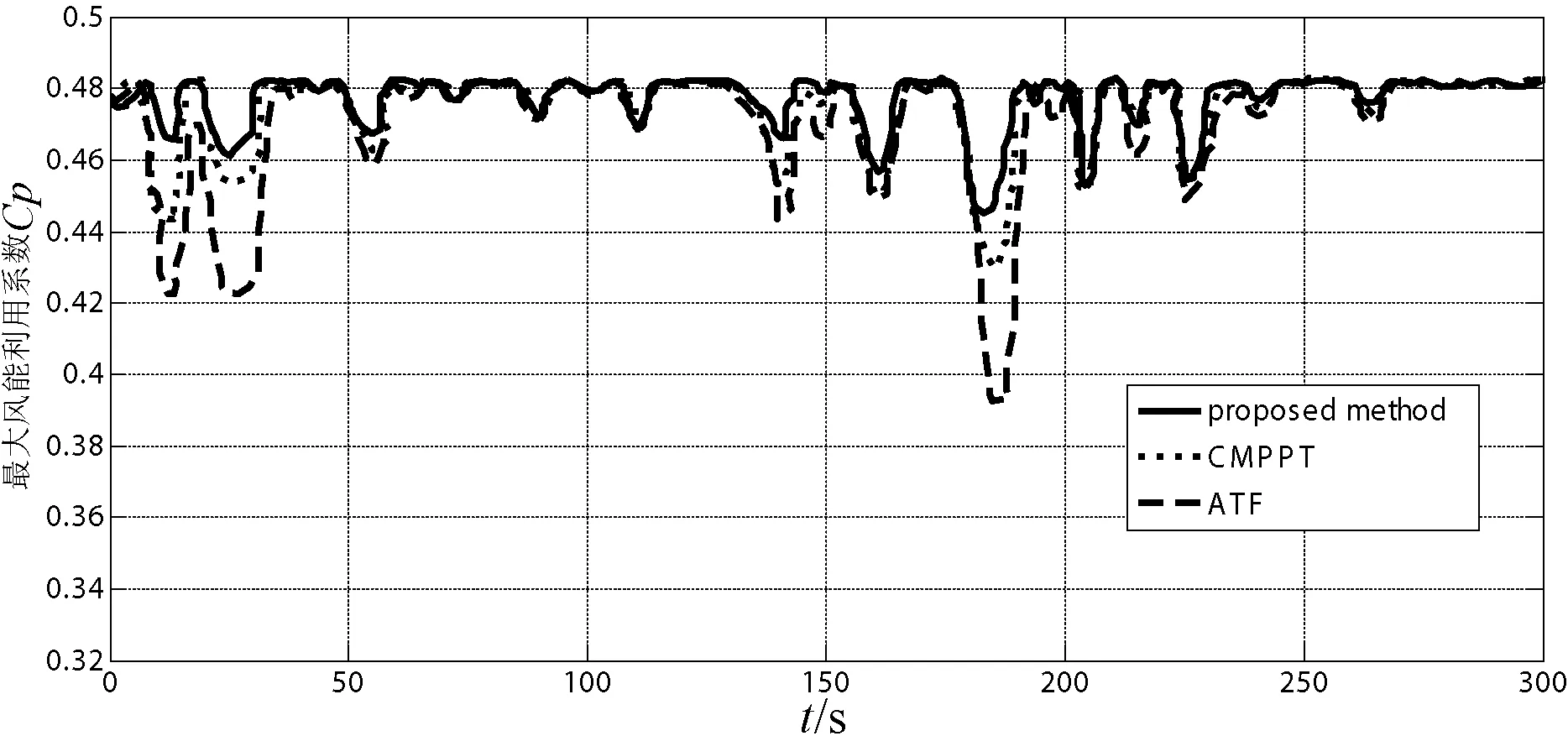
圖8 三種策略下的Cp比較

圖9 不同策略下的轉(zhuǎn)速比較

圖10 不同方法的發(fā)電機(jī)轉(zhuǎn)矩比較
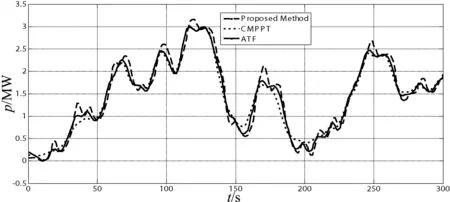
圖11 不同方法的功率比較
從圖7顯示的模擬風(fēng)速曲線可以看出風(fēng)速是非線性運(yùn)行時(shí)變,圖8顯示了不同方法的風(fēng)能利用系數(shù),風(fēng)力機(jī)的最大風(fēng)能利用系數(shù)Cp(max)為0.482。從圖9中可以看出本文提出的方法能夠比傳統(tǒng)方法能更好地跟蹤轉(zhuǎn)速。與傳統(tǒng)方法相比,圖10和圖11顯示的轉(zhuǎn)矩和功率曲線圖中本文所提出的轉(zhuǎn)矩控制具有一定的抗擾動能力,而且能更好地跟蹤風(fēng)速變化,系統(tǒng)響應(yīng)時(shí)間較快,且轉(zhuǎn)矩抖動幅度小。
為了比較不同方法的風(fēng)能捕獲效率或功率;使用統(tǒng)計(jì)學(xué)方法評估均值:
(17)
式中:ψ(t)可以是P(T)或CP(T)(即輸出功率或風(fēng)能利用系數(shù))。根據(jù)評估均值J的大小可以看出,在一定時(shí)間內(nèi)J越大越好。表6顯示了三種不同策略下的(本文方法、CMPPT和ATF)比較分析結(jié)果,其中:Pout(avg)表示一定時(shí)間內(nèi)的平均輸出功率;Cp(avg)表示一定時(shí)間內(nèi)最大風(fēng)能利用系數(shù)的平均值。由表6可見,本文提出的方法具有較好的功率捕獲性能。
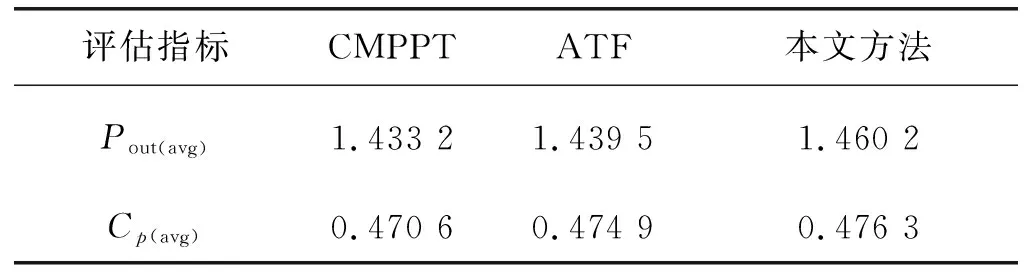
表6 不同策略下的J比較
5 結(jié) 語
本文提出了一種基于粒子群算法和模糊PI結(jié)合的最優(yōu)轉(zhuǎn)矩控制器,用于實(shí)現(xiàn)低風(fēng)速時(shí)的最大風(fēng)能捕獲。利用粒子群算法求出了不同風(fēng)速下的最優(yōu)PI增益,利用最優(yōu)PI增益進(jìn)行模糊PI控制優(yōu)化參數(shù);為了減小風(fēng)速變化引起的轉(zhuǎn)矩波動,采用低通濾波器。與另外的CMPPT、ATF兩種控制策略相比,本文提出的策略能較好地跟蹤轉(zhuǎn)速、功率和轉(zhuǎn)矩,轉(zhuǎn)矩波動小。為證明結(jié)果的可靠性,采用統(tǒng)計(jì)學(xué)方法分析本文提出的策略,結(jié)果顯示本文策略能實(shí)現(xiàn)風(fēng)能的最大捕獲結(jié)果,具有明顯的優(yōu)越性。
猜你喜歡
氣象與環(huán)境科學(xué)(2021年4期)2021-08-27 02:26:12
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中國電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
風(fēng)能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31
