截斷重分配組合偏置推力分配算法
2018-11-22 07:57:24陳亞豪,徐海祥*,,李文娟
大連理工大學學報 2018年6期
陳 亞 豪, 徐 海 祥*,, 李 文 娟
( 1.武漢理工大學 交通學院, 湖北 武漢 430063;2.武漢理工大學 高性能船舶技術教育部重點實驗室, 湖北 武漢 430063 )
0 引 言
船舶在實際的定點定位過程中,當遇到海洋環境力較小,方向頻繁地大角度變化的海況時,為保證動力定位船舶的操縱性,不允許將全回轉推進器停止運轉來輸出零推力,并且由于推進器本身的物理特性,單位時間方位角轉動的角度有限,推進器轉動相對較緩慢,可能會導致滯后的現象,這就需要對推力分配算法進行改進來達到上述工況要求.
最早由Kongsberg提出了偏置的概念,其主要思想是對全回轉推進器進行分組,允許全回轉推進器之間相互抵消推力,各個組可以包含兩到三個推進器,其中偏置量是指運行推進器使之相互抵消時,各推進器相互抵消的推力,并提出了組合偏置推力分配策略[1-2],通過允許全回轉推進器與同組的推進器相互抵消,使偏置效果為零.Veksler等[3]在動力定位船舶推力分配的功率管理功能研究中,運用組合偏置推力分配策略,在立即減少推進器功率時,推力分配沒有明顯地偏離控制力的要求,從而提高了船舶快速減載能力.施小成等[4]提出了一種自適應組合偏置算法,通過優化算法得到的最優推力確定自適應偏置因子,從而計算出偏置量,再進行組合偏置推力分配,但是算法確定的偏置量是固定不變的,在外界環境力較小時將會產生多余的能量損耗.徐海祥等[5]提出了一種新的自適應組合偏置推力分配算法,該算法將偏置量分為兩個部分:一部分是固定的偏置量,另一部分是隨推力而實時變化的偏置量,算法具有良好的自適應性,但是算法只在縱向增加了偏置量,沒有考慮禁區角問題和角度截斷問題,在實際的工程應用上存在一定的限制.
為了實現組合偏置推力分配在實際動力定位中的應用,本文在文獻[5]中提出的自適應組合偏置推力分配算法的基礎上進行改進,考慮禁區角的影響,提出截斷重分配的分配策略,并以一艘實驗室模型船為研究對象,進行模型實驗驗證算法在實際工程應用中的效果.
1 推力優化分配數學模型
1.1 目標函數
在動力定位系統的應用中,推力優化分配數學模型的目標函數體現了操作者對動力定位船舶當前的控制要求,且在不同的工作要求下,其目標函數也各不相同.本文以船舶的能耗最小作為目標,建立如下的目標函數[6]:
(1)
式中:P為能耗,Ti為第i個推進器的推力,s為松弛變量,W、Q為權值矩陣.
1.2 約束條件
推力分配的首要任務是使推力優化分配結果盡量滿足上層控制器所給出的控制指令,通過建立各個推進器推力與控制器之間的關系,來構建推力優化分配模型的等式約束.
為了避免復雜的非線性問題,本文采用了擴展推力的概念,將全回轉推進器的推力分解為橫向Y和縱向X上正交的推力:
u=(ux1uy1ux2uy2…uxnuyn)T∈R2n×1
(2)
由此,推進器的擴展型配置矩陣可以表示為
(3)
則等式約束可以表示為
τ=Bu
(4)
推進器在執行推力分配指令時,將會受到其自身力學性能的約束,主要有各個推進器推力上下限、推力變化率限制、全回轉推進器角度變化率限制等約束,根據這些約束條件,構建推力優化分配模型的不等式約束:
Tj,min≤Tj≤Tj,max
ΔTj,min≤ΔTj≤ΔTj,max
Δαj,min≤Δαj≤Δαj,max
(5)
式中:Tj表示第j個推進器的推力大小,ΔTj表示第j個推進器一個周期的推力變化,Δαj表示第j個推進器一個周期的角度變化.
2 組合偏置推力分配算法
文獻[5]提出了一種自適應偏置算法,將偏置量分為兩個部分:一部分是固定的偏置量Δ1,另一部分是隨推力而實時變化的偏置量Δ2.
Δ1由下式確定:
(6)
式中:TΔ為當前時刻的最大推力;μ為固定偏置量的系數,且μ∈(0,1);T1,max和T2,max分別為當前時刻1號推進器和2號推進器的最大推力.
隨推力變化的偏置量Δ2可表示為
Δ2=|f/tanα|
α=(f/Tmax)ε×90
(7)
式中:f為當前時刻推進器的推力;α為當前時刻推進器的方位角,ε為角系數;Tmax為推進器的最大推力.
則在第k個采樣周期時的自適應偏置量Δk可以表示為
Δk=Δ1+Δ2=
(8)
式中:δ為旋轉系數.
上述的自適應偏置算法具有良好的實時性,且解決了在海洋環境力較小情況下偏置量過大的問題,但是該算法只是在推進器的縱向上增加了偏置量,使得在海洋環境力較小的情況下,推進器的角度會偏向縱向,這就導致推進器的推力方向在禁區角區域內,造成較大推力損失,且在實際的實驗過程中發現,由于船舶推進器的位置誤差、推進器的加工精度以及重心的測量誤差等影響,這種分配方式可能會導致推進器推力分配失敗.
針對上述算法存在的問題,本文在該算法的基礎上進行改進,對推進器的縱向和橫向都增加偏置量Δx和Δy,并根據船舶的禁區角區域范圍,通過調整兩個偏置量的大小,明顯改變推進器的方向,使推進器推力方向避免進入禁區角.偏置量Δx和Δy由下式確定:
(9)
式中:α1、α2分別為禁區角的下限和上限.
在實際的船舶推力分配工程應用中,推進器頻繁的轉動,會造成推進器嚴重的機械磨損和大量的能量消耗.在自適應組合偏置推力分配中,為了避免推進器小角度地頻繁轉動,常常采用角度截斷的方式來限制角度的變化,但是這種方法往往會影響控制力的分配.
針對上述問題,本文提出截斷重分配的控制策略.該策略根據實際工程應用中推進器技術參數,設置一個合適的截斷角度,并在得出分配結果后計算各推進器當前時刻與上一時刻角度的差值,將該差值與截斷角度進行比較.當該差值大于截斷角度時,采用固定角推力分配模式對推力進行重新分配;當該差值不大于截斷角度時,不進行推力重新分配.截斷重分配控制策略控制條件由下式確定:
γn,k-γn,k-1≤βn
βn=μnΔαn,max
(10)
式中:γn,k、γn,k-1分別為第k個、k-1個采樣周期時第n個推進器的角度;βn為第n個推進器的截斷角度;μn為第n個推進器的截斷角度系數;Δαn,max為第n個推進器的最大角度變化率.
3 仿真結果及分析
為了驗證截斷重分配組合偏置推力分配算法的正確性及有效性,并與文獻[5]中的自適應組合偏置算法進行對比,本文以實驗室的一艘動力定位模型船為對象,該動力定位模型船具有3個全回轉推進器,其推進器布置見圖1,推進器相關的技術參數見表1.由于該動力定位模型船只有3個全回轉推進器,推進器數量有限,無法將推進器進行組合實現組間偏置,所以在設計組合偏置算法時,將3個全回轉推進器分為一組,進行組內偏置.從而設計了兩種仿真方案:方案1采用文獻[5]中的自適應組合偏置推力分配算法,方案2采用截斷重分配組合偏置推力分配算法.
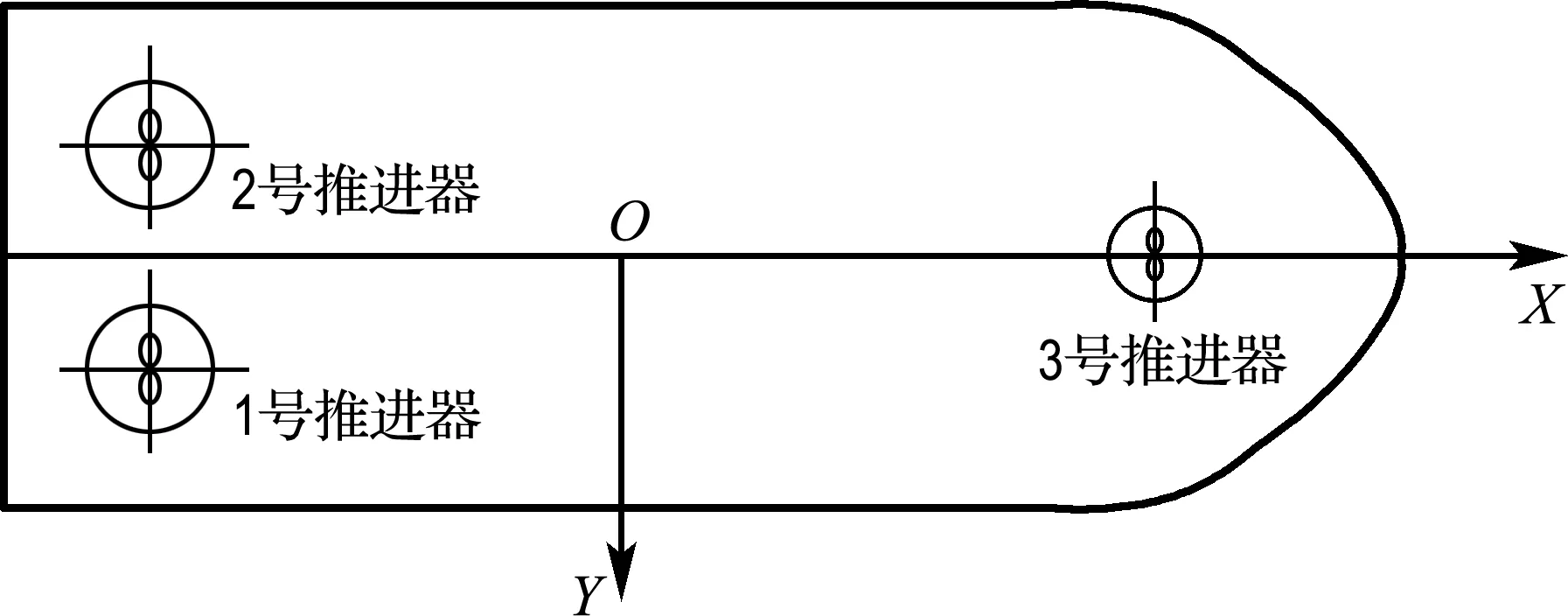
圖1 推進器位置布置

表1 推進器技術參數
仿真模擬了海洋環境力較小,方向頻繁大角度變化,控制系統要求推進器發出較小推力,甚至零推力的特殊工況,給定一組定點定位實驗的控制力指令,如圖2所示,該控制力指令是一組在模型船上實現了定點定位功能的控制力指令,具有比較好的參考價值,而且其控制力較小,且在零附近持續變化,滿足運用偏置的前提要求.兩個方案的自適應組合偏置算法的相關參數均取為ε=0.7,δ=0.8.方案2的截斷角度設定為5°,1號推進器和2號推進器的禁區角范圍分別為75°~105°和255°~285°,3號推進器距離1號和2號推進器較遠,故3號推進器不考慮禁區角區域.

圖2 控制力
仿真結果如圖3~5所示.
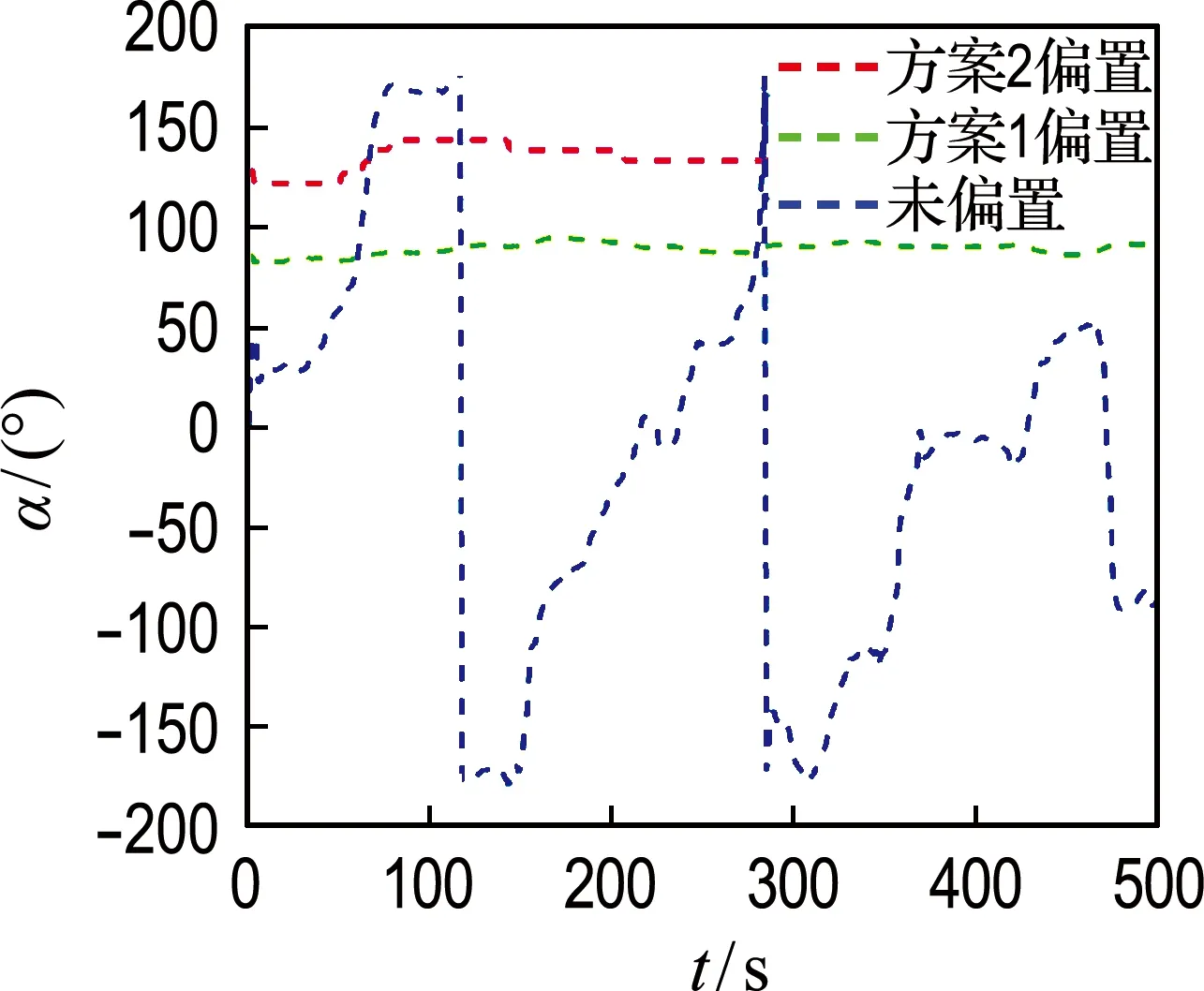
在圖5中,方案1中1號推進器在90°附近小角度頻繁變化,2號推進器在90°附近小角度頻繁變化,3號推進器在-90°(270°)附近小角度頻繁變化.方案2中1號推進器在140°附近短時間進行較小角度變化,長時間處于恒定狀態;2號推進器在50°附近短時間進行較小角度變化,長時間處于恒定狀態;3號推進器在-90°(270°)附近短時間進行較小角度變化,長時間處于恒定狀態.
兩個方案對比表明:
(1)由圖3、4可知,兩種分配方案都能夠成功分配控制系統給出的控制力/力矩.
(2)由圖5(a)可知,1號推進器的推力方向在方案1中處于禁區角區域內(75°~105°),在方案2中處于禁區角區域之外.方案2在進行推力分配時調整了1號推進器的推力方向,避免了推進器推力方向在禁區角區域內.
(3)由圖5(a)、(b)可知,1號和2號推進器在方案1中一直處于小角度頻繁變化的狀態,在方案2中長時間保持角度恒定狀態,短時間進行小角度變化.方案2避免了1號和2號推進器在小角度范圍內進行變化,只有當角度變化超過設定的截斷角度時才會進行變化.
(4)由圖5(c)可知,3號推進器在兩種方案中推力方向相同.由于3號推進器不考慮禁區角區域,故方案2沒有調整3號推進器的推力方向.
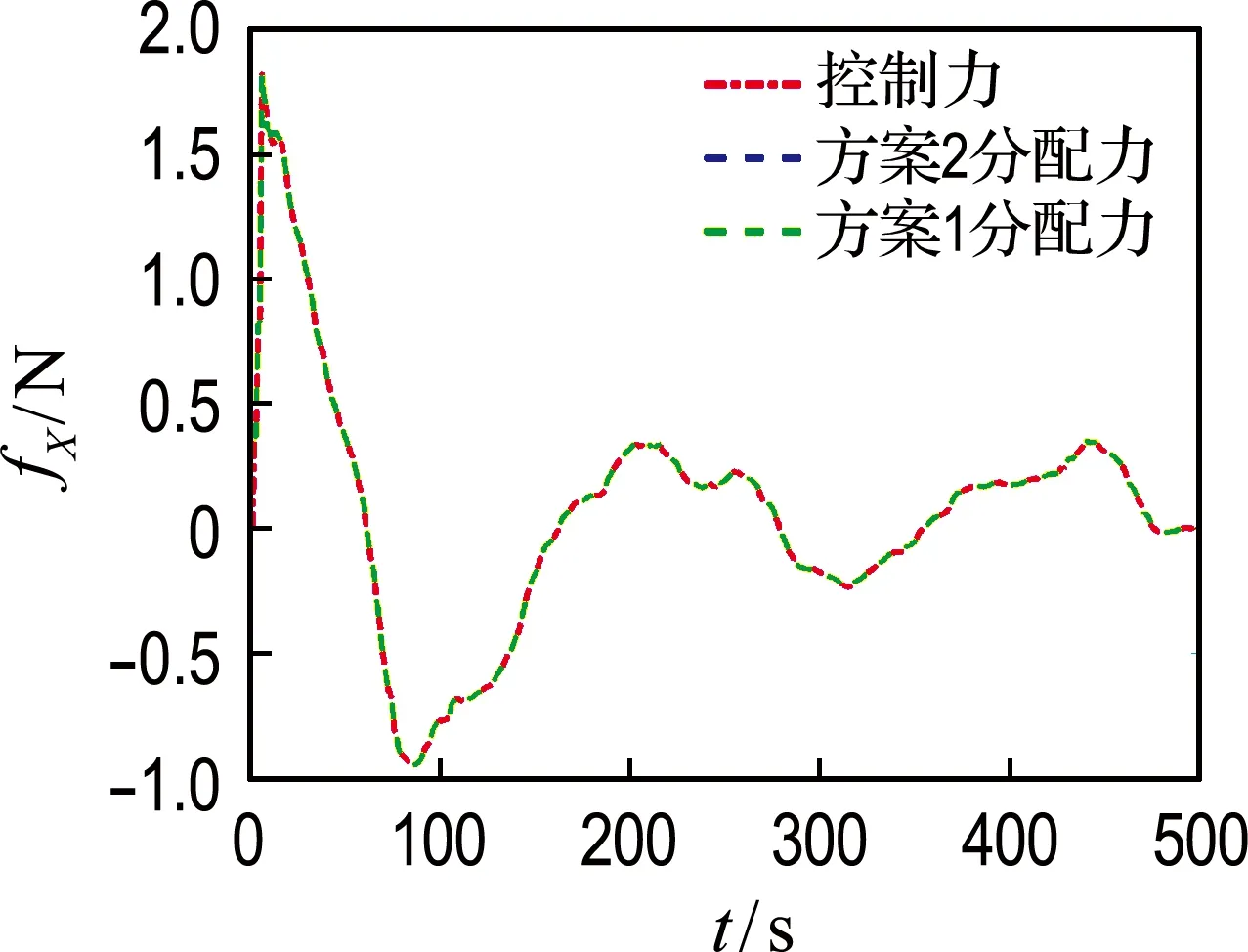
(a) X方向
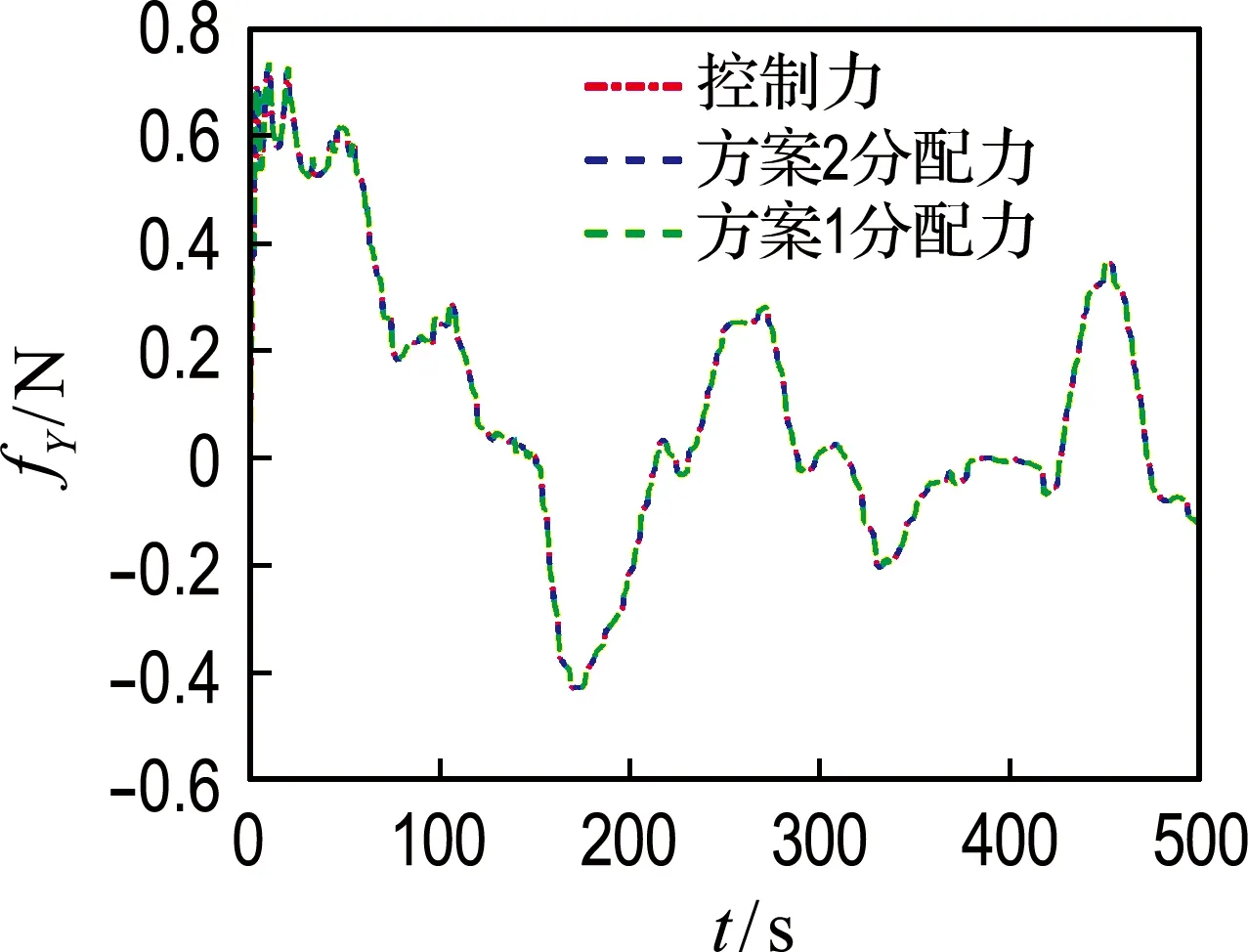
(b) Y方向
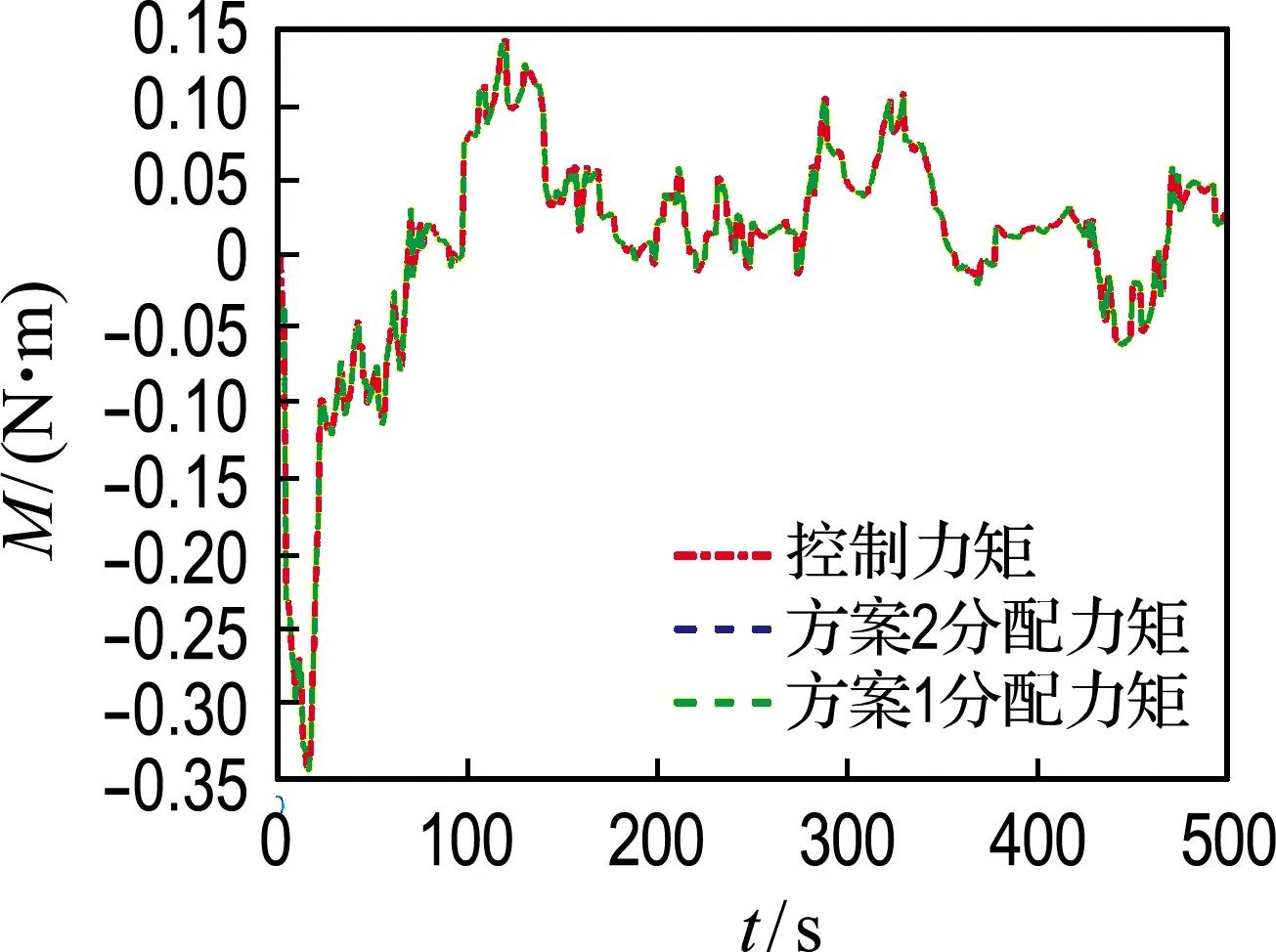
圖4 控制力矩分配結果對比
(5)由圖5(c)可知,3號推進器在方案1中一直處于小角度頻繁變化的狀態,在方案2中長時間保持角度恒定狀態,短時間進行小角度變化.方案2避免了3號推進器在小角度范圍內變化,只有當角度變化超過設定的截斷角度時才會進行變化.
由仿真結果可知:對比文獻[5]中的自適應組合偏置算法,本文算法能夠在不影響控制力分配的條件下,調整推進器的推力方向,避免推進器的推力方向處于禁區角區域,且能通過截斷重分配的策略避免推進器在小角度范圍內進行變化,從而減少推進器之間相互干擾造成大幅推力損失和推進器頻繁轉動導致的嚴重機械磨損和大幅的能量消耗.
(a) 1號推進器

(b) 2號推進器

(c) 3號推進器
圖5 推進器角度變化對比
Fig.5 Comparison of angle changes of thruster
4 實驗結果及分析
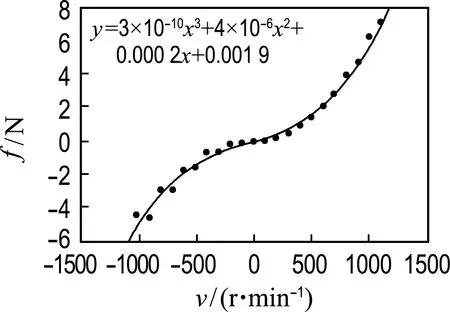
為驗證算法在工程中的實際效果,在仿真的基礎上進行了模型實驗.推進器系統由船體艏部的一個全回轉推進器以及尾部的兩個全回轉推進器組成,推進器的位置布置如圖1所示,推進器的參數如表1所示,推進器的推力特性曲線見圖6.
為了盡可能地實現環境力較小,方向頻繁大角度變化的工況,本次模型實驗在室外進行,環境條件為風速較小以及風向變化較大.實驗選取的控制力指令滿足控制系統要求,與仿真的控制指令相同,為一組定點定位的控制力指令,如圖2所示.算法的相關參數與仿真同樣設置:ε=0.7,δ=0.8,1號推進器和2號推進器的禁區角范圍分別為75°~105°和255°~285°,截斷角度設定為5°.

(a) 1號推進器
(b) 2號推進器

(c) 3號推進器
圖6 推進器推力特性曲線
Fig.6Thrust characteristic curve of thrusters
實驗結果如圖7~10所示.
在圖7中,船舶的位置從(4.5,4.0)移動至(4.0,3.5),并在(4.0,3.5)保持較好的穩定.在圖8、9中,推力/力矩的分配幾乎與控制推力/力矩相同.在圖10中,3個推進器的角度都有一定的變化,但是不存在小幅度(≤5°)的頻繁變化.

圖7 船舶位置變化

(a) X方向

(b)Y方向
圖8 推力分配結果
Fig.8 The result of thrust distribution

圖9 力矩分配結果

圖10 推進器的角度變化
實驗結果表明:
(1)實驗成功地實現了定點定位,并在定位點很好地保持了位置不變.
(2)成功地實現了推力分配,X方向、Y方向力和力矩的分配都很好地達到了控制要求.
(3)1號和2號推進器短時間處于禁區角范圍內,長時間都處于禁區角范圍之外,較好地避免了禁區角對推進器的影響.
(4)相比于理想情況,推進器的角度變化更大,這可能是由于實驗過程中外界環境、信號干擾、推進器物理限制等因素導致的,但這樣的角度變化在推進器的物理限制之內,且推進器避免了小角度(≤5°)的頻繁變化,實現了截斷重分配策略的目標.
5 結 語
本文在用組合偏置推力分配算法解決海洋環境力較小而方向變化頻繁工況下的推力分配問題時,對于現有的自適應組合偏置推力分配算法在控制推進器方向和保持推進器穩定性上的不足,提出了截斷重分配的策略,設計了截斷重分配組合偏置推力分配算法.對該算法和現有的自適應組合偏置推力分配算法進行了仿真對比,結果表明:(1)兩種算法都能夠成功達到控制力/力矩的分配要求;(2)本文算法能夠調整各個推進器的推力方向,避免推進器的推力方向處于禁區角區域;(3)本文算法能夠避免推進器在小角度范圍內頻繁轉動.模型實驗驗證本文算法能夠減少船舶推進器的推力損失、機械磨損和能量消耗.
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24