基于GA的二自由度PID在火電機組的應用
2018-11-13 08:44:54吳延凱
電力科學與工程 2018年10期
吳延凱, 張 偉
(上海理工大學 光電信息與計算機工程學院,上海 200093)
0 引言
隨著社會的發展進步,PID的參數調節方法同樣也在不斷地進步。1942年,Ziegler和Nichols運用一階慣性加延遲對象的PID控制器參數整定,也即Z-N方法,這為PID控制器的進步奠定了基礎[1]。1970年,Astrom和Hagglund在臨界比例度原理上,結合ISTE標準,提出使用基于臨界信息的相幅裕度設置參數,并給出了參數整定公式,解決了Z-N法整定時間長、臨界穩定的缺點[2]。隨后,針對運用Z-N法得到的PID參數在實際控制中往往會引起系統響應的過度超調、過度振蕩等不符合工藝要求的結果,C.C.Hang在原始Z-N法的基礎上,在Z-N法中增加了設定值權值和積分時間修正系數,很好地解決了這些缺點[3]。2011年,Karunagaran等人創建了一種基于二自由度并行控制結構的PID控制器,改善了單自由度PID控制器不能同時兼顧目標值跟蹤特性及外擾動抑制特性的缺點[4]。
目前,火電廠的火電機組控制回路正向著大容量,高參數的方向發展,對控制系統的可靠性和精度提出了更為嚴格的要求[5]。尤其是對鍋爐的主蒸汽溫度的控制上,顯示出了更為嚴格的要求,因為主汽溫的值嚴重影響著火電機組能否正常的運行[6]。在此環境下,本文提出了一種基于遺傳算法的二自由度PID控制器的多參數智能調節方法。保證主汽溫維持平衡,以確保火電廠的火電機組控制回路更有效的運轉。針對PID的多目標優化問題,采用自適應遺傳算法對二自由度PID控制器的參數進行調節與優化。由控制系統的性能需求,對每一項指標值進行適當的加權,并實時優化。最終通過仿真證明,基于遺傳算法改進的二自由度PID要優于文獻[7]中的二自由度并行控制結構PID,在各項性能指標值、目標值跟蹤特性及抗擾動特性上有著極大程度地改善,能夠更好地應用于主汽溫的控制上。
1 二自由度PID控制器原理
在工業生產中,由于PID控制器具有良好的控制性能,故被廣泛的應用。尤其是用在生產過程中干擾作用強,被控制對象的極易變化,并且對控制的需求要求很高的地方。一般情況下,PID控制器將比例、積分及微分調節三者組合在一起,各自發揮出各自的長處,共同對被控對象進行良好的控制[8]。
在常規的單自由度PID控制器中,它僅有唯一的一個PID可以進行調節。這樣,就會出現一個問題:控制系統不能同時使得系統的抑制擾動的能力和目標值的追蹤同步的到達最佳控制效果。當利用抗干擾性質調整PID的參數時,就不能保證目標值的追蹤效果是好的;相應的,當利用目標值的追蹤性質調整PID的參數時,會讓系統在抑制擾動方面的性能下降[9]。對待這一問題,只能采用一種兩者同時兼顧的方法來進行PID控制器參數的調節。因此,二自由度的PID控制器就應運而生,并在實際應用中取得了良好的效果[10]。與一般的單自由度PID相比較,二自由度的PID大大提高了目標值的跟蹤特性和抑制干擾的特性。如圖1所示為文獻[7]中提出的一種二自由度并行控制結構PID控制器的原理框圖。
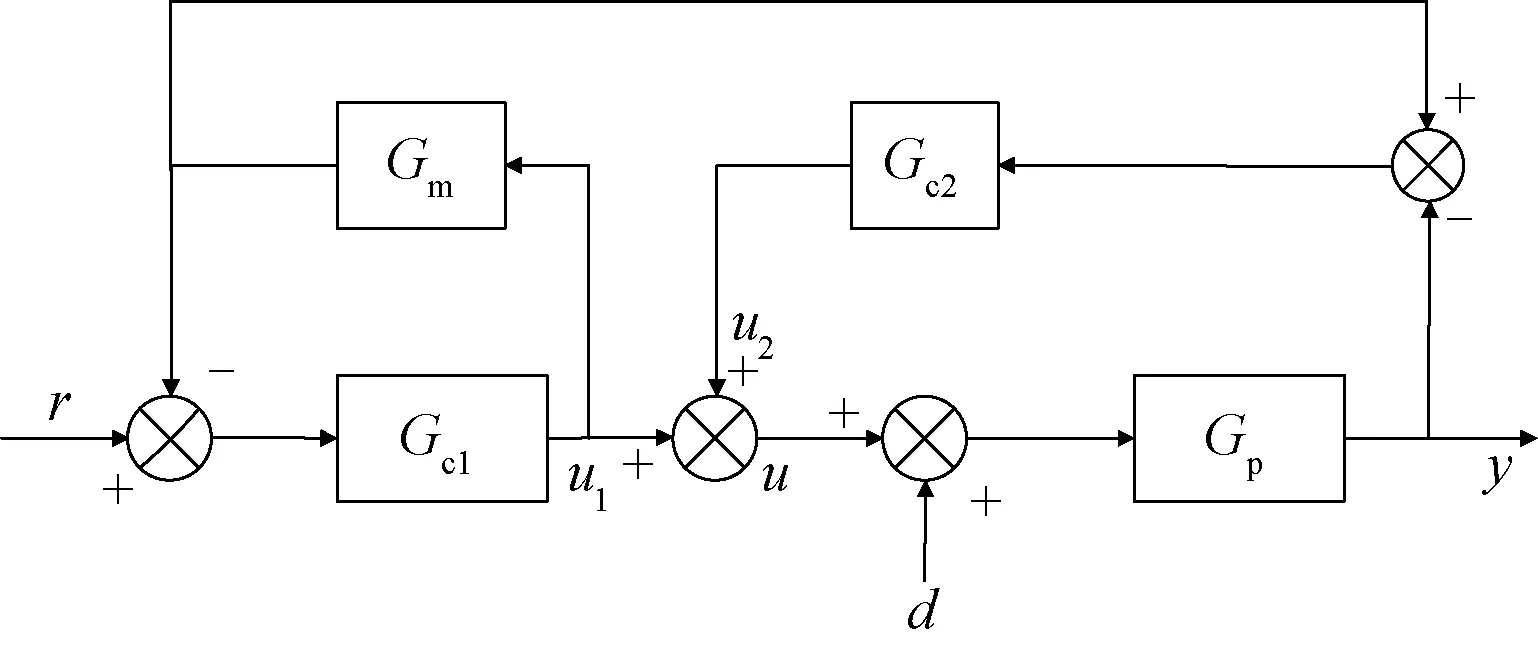
圖1 二自由度并行控制結構PID控制器原理圖
其中,r(t)為系統輸入,d(t)為擾動輸入,u1(t)為PD輸出,u2(t)為PID輸出,u(t)為兩個控制器輸出的疊加,y(t)為系統輸出。
對于PD(Gc1),主要調節跟蹤特性,其控制方程可表示為:
Gc1(s)=Kc1(1+Td1s)
(1)
對于PID(Gc2),主要調節抗擾動特性,其表達式為:
(2)
該二自由度并行控制結構的閉環輸出表達式為:
(3)
在二自由度PID的參數調整過程中,采取:Gp=Gm,則可表示為:
(4)
在式(1)和(2)中,Kc1和Kc2為控制器增益,Td1和Td2為微分時間常數,Ti2為積分時間常數。比例調節的過程簡單迅速,并且參數的調節也很方便,但結果有一定的殘差。積分調節可以很好地減小系統的不平穩而帶來的穩態誤差,它的缺點就是會減緩系統的控制速率。微分調節則具有超前調節的作用,因此在處理嚴重滯后的對象時會具有良好的成效。因此,在實際中常把比例、積分、微分調節這3者結合起來使用。尤其是利用二自由度并行控制結構的PID,它可以在實際控制中達到更加良好的調節效果。
2 基于遺傳算法的改進二自由度PID控制器
2.1 GA-二自由度PID控制器的基本原理
基于遺傳算法的改進二自由度PID控制器的設計由兩部分組成:一般的二自由度PID控制器和遺傳算法模塊組成。被控制對象由二自由度PID進行重復性的控制,而對于遺傳算法,它按照對應的算法流程,對二自由度PID的Kc1、Kc2、Td1、Td2、Ti2這5個參數進行一代代的優化下去。同時,不斷地同步調整PID的這5個參數值,快速找出最優值,以便于讓主汽溫控制系統的目標值跟蹤特性和抗擾動特性能同步快速到達最佳控制狀態。這樣,系統就能夠快速穩定的輸出。遺傳算法模塊中將二自由度PID的Kc1、Kc2、Td1、Td2、Ti2這5個參數整合在一起作為遺傳算法中的每個個體。根據遺傳算法流程對個體編碼,計算每個個體的適應度,對種群進行選擇、交叉及變異操作,這樣可以使種群不斷繁殖延續,直到尋到全局的最優值為止。GA-二自由度PID結構原理圖如圖2所示。
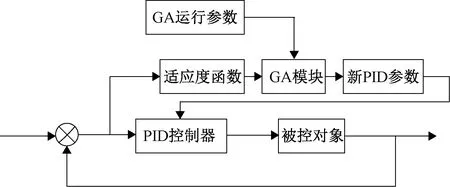
圖2 GA-二自由度PID控制器原理圖
2.2 遺傳算法的實現流程
根據遺傳算法的實現過程,對種群進行迭代尋優操作,這個過程將一直持續下去,直到尋到一個最優解為止[11]。遺傳算法的操作步驟如下:
Step1 初始化群體生成: 首先利用隨機函數產生一個n=100的種群。
Step2 編碼方式: 接著利用二進制編碼,把Kc1、Kc2、Td1、Td2和Ti25個參數組合在一起,形成一條染色體。
Step3 適應度函數的選取: 適應度函數的選取是至關重要的,選擇一個合適、優良的適應度函數對整個尋優過程有著重要意義,它可以直觀地表達出個體的好壞。
Step4 選擇操作: 對于種群中每個個體的選擇,要根據Step3中的適應度函數對每個個體所計算出來的適應度數值來衡量。此外,如果種群中每一代的個體數選擇得當,對遺傳算法的尋優有著極大的幫助,可以避免種群的快速早熟而帶來的尋優過早結束問題。
Step5 交叉操作: 根據實際情況,此次使用單點交叉來進行。
Step6 變異操作: 自然界中,由于各種因素會導致生物基因的突變,進而導致個體變異,表現出新的特征。同樣,在遺傳算法中,也可以人為地加入一些變異,使群體有更多的表現型,增加種群的多樣性。
Step7 解碼: 當尋優結束之后,就要對找到的最優值做解碼操作,也即把對應的二進制數值變為十進制數值。具體的實現方法如下:若某個參數取值區間是[Umin,Umax],則該參數可以用長度為m的二進制數值來表示,可表示為x:bmbm-1bm-2…b2b1,上述對應的二進制數值的解碼公式為[12]:
(5)
遺傳算法的操作流程框圖如圖3所示。
在遺傳算法的尋優操作過程中,終止條件是一個關鍵部分。因此,對于如何判斷系統已經找到最優解,本文以所有種群個體的目標函數值(IAE值)是否一致來作為終止條件。這樣可以避免過早收斂、產生早熟現象,可以更準確地尋到最優解。
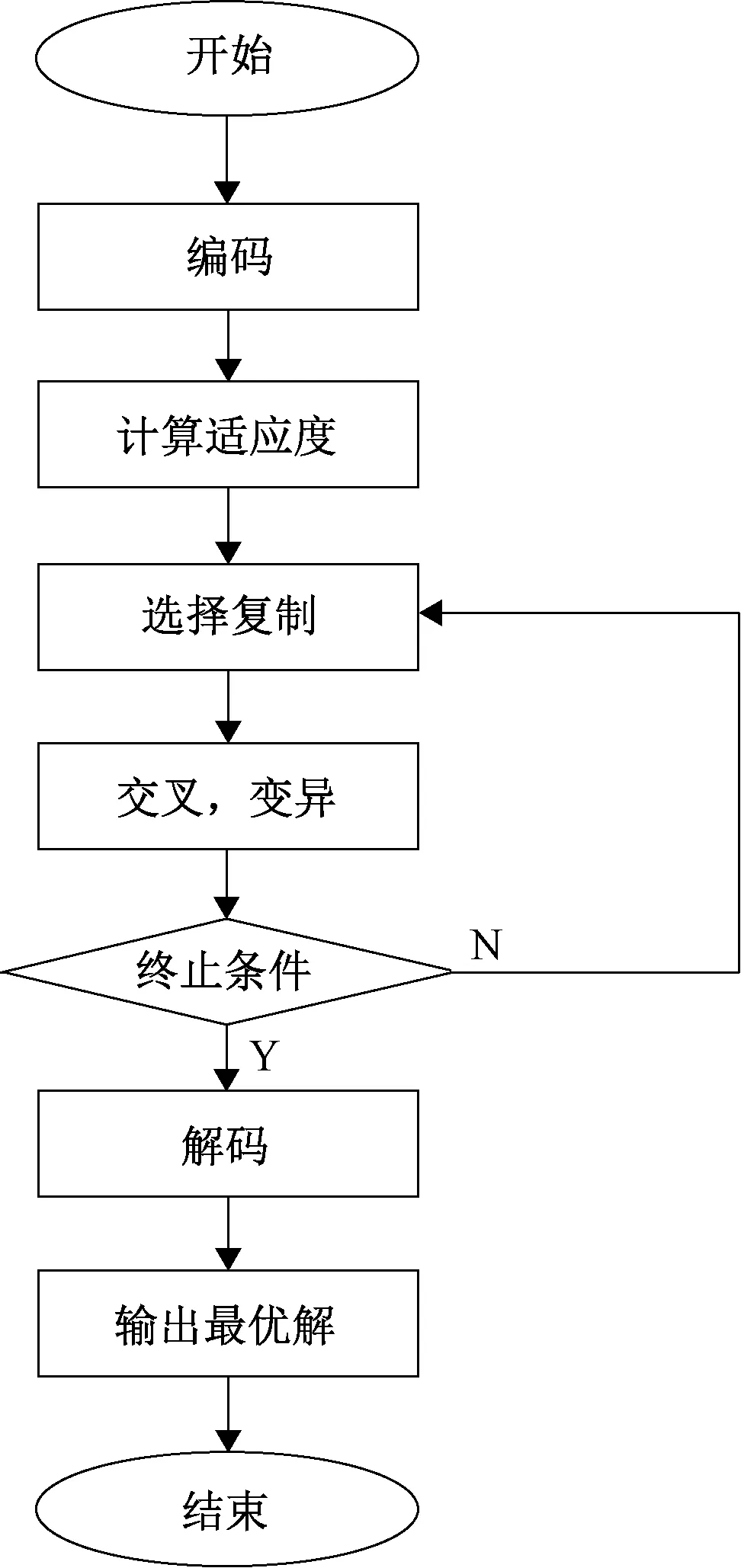
圖3 遺傳算法操作流程圖
2.3 GA-二自由度PID控制器的參數整定實例
為驗證方法的有效性,本文將該方法應用于火電廠火電機組主蒸汽溫度控制系統中,通過對該控制系統的辨識,得到被控對象的數學模型為:
(6)
對二自由度的PID控制器的5個參數進行二進制編碼,其中Kc1∈(0,10),Td1∈(0,1),Kc2∈(0,10),Ti2∈(0,20),Td2∈(0,1)每個參數的長度取8位二進制數,5個參數依次串接,形成一個個體,個體長度為L=40,種群大小取n=100。其中,選擇算法采用常用的輪盤賭算法。交叉概率一般取0.4~0.9,本文取Pc=0.9,變異概率取0.001~0.1,本文取Pm=0.001 。此外,為了實現超調量、調節時間等時域指標的統一優化,本文的目標函數取絕對誤差積分準則:

(7)
對于適應度函數的選擇,取當前群體中最大的目標函數值(IAE值)減去當前個體的目標函數值(IAE值)來作為適應度函數。也即:
f=Objmax-Obji
(8)
因此,當某個體目標函數值越大時其適應度函數值越小。而且,在任何一代的種群中,無論目標函數值相差多么接近,適應度函數總會相差很大。且當種群所有個體目標函數值完全一致時,所有個體的適應度函數均為零。故在迭代結束時,種群目標函數已經收斂到一個固定值。例如:假設當前種群有5個個體,目標函數值為[10,10.1,11,11.1,11],根據公式(8)可得本文選取的適應度函數值為[1.1,1,0.1,0,0.1]。而根據一般情況,適應度函數的選取是由目標函數的倒數所得,其適應度函數值為[0.1,0.099,0.091,0.090,0.091],可見該方法所獲得的適應度函數值相差不大,用輪盤賭方式淘汰個體時,淘汰概率相差不大。而本文所選取的適應度函數所得到的適應度函數值相差較大,有一定的區分度。
3 算例仿真分析
通過遺傳算法尋優得到5個參數的最終值與文獻[7]采用二自由度得到的5個參數值、文獻[8]采用二自由度得到的5個參數值以及文獻[13]采用單自由度得到的3個參數值結果,如表1所示。

表1 PID控制器參數值對比
通過進行MATLAB仿真,得到了種群平均IAE值隨迭代次數的優化過程。如圖4所示。
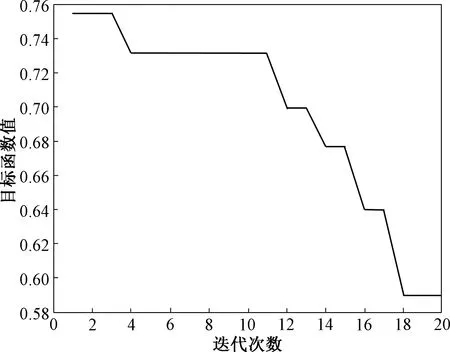
圖4 種群平均IAE值的優化過程
從圖中的曲線可以看出:隨著迭代次數的增加,不斷對種群中IAE值進行尋優選擇,最終迭代結束時能夠尋得一個最優的IAE值,為 0.591 2。最終尋得的最優IAE值是由目標值跟蹤部分的IAE1和抗擾動部分的IAE2,這兩部分的最優值之和組成。
通過遺傳算法整定后的二自由度PID的階躍響應曲線和文獻[7]中的二自由度PID、文獻[8]中的二自由度PID以及文獻[13]中的單自由度PID的階躍響應曲線對比效果展示,如圖5所示。
通過以下2個計算IAE和ISE的數學表達式,并運用MATLAB進行計算,可以得到如表2所示的4種情況下的性能指標數值。
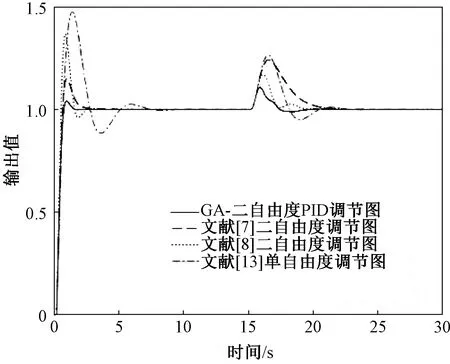
圖5 GA-二自由度PID與其他3種方法調節效果對比圖
(9)

(10)
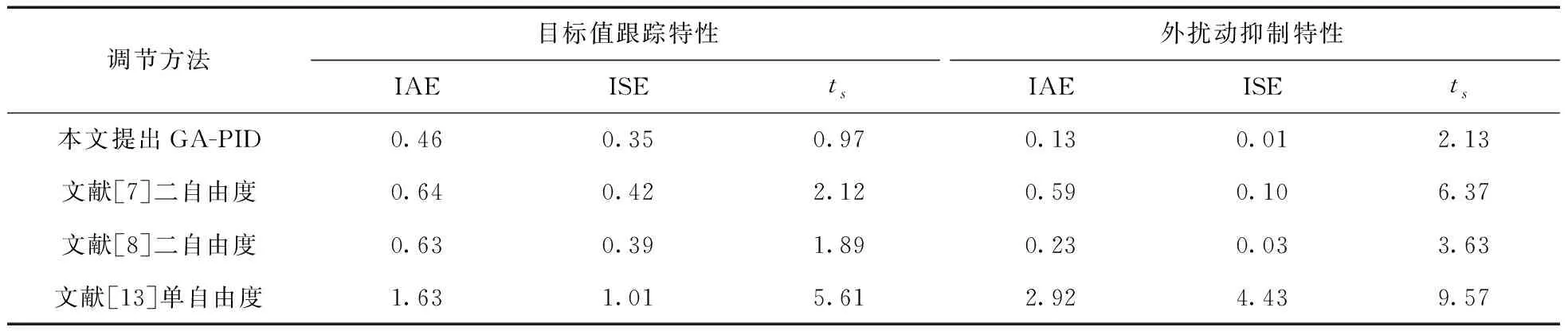
表2 性能指標值對比結果
通過對圖5和表2的仿真結果分析,可以清晰地得到:本文提出的遺傳算法改進的GA-二自由度PID無論是目標值跟蹤還是外擾動抑制方面,IAE、ISE及ts這3個性能指標的值均優于其他3種方法得到的結果。此外,通過圖5還可以清晰地看出本文所提出的方法在超調量和調節時間上也是遠遠優于其他3種方法。由此可知,本文提出的基于遺傳算法改進的二自由度PID在目標值跟蹤特性及外擾動抑制特性的控制效果和性能指標上明顯要優于其他3種方法。
4 結論
在PID的應用設計中,PID參數的調節是一個重要的環節。本文從二自由度PID和遺傳算法的原理出發,將遺傳算法應用于二自由度PID參數的調節與優化,并利用MATLAB進行火電機組鍋爐主蒸汽溫度控制系統的仿真實驗。實驗結果表明: 對于主汽溫系統的控制效果上,基于遺傳算法的改進二自由度PID在目標值跟蹤特性及外擾動抑制特性等方面的成效均優于文獻[7]的二自由度PID、文獻[8]的二自由度PID以及文獻[13]的單自由度PID。使得輸出值最大程度上接近于輸入值,減小了系統的誤差值,并使得系統具有更小的超調量和調節時間。實驗清晰地證明了采用遺傳算法對二自由度PID參數調節和優化是有效的,能夠獲得更好的控制效果,滿足了火電廠火電機組主蒸汽溫度控制系統的需求。
