基于改進(jìn)下垂控制的主從微電網(wǎng)無差調(diào)頻策略
2018-11-13 08:44:50肖迎群
電力科學(xué)與工程 2018年10期
高 佳, 肖迎群
(1. 貴州大學(xué) 電氣工程學(xué)院,貴州 貴陽 550025; 2. 貴州理工學(xué)院 大數(shù)據(jù)學(xué)院,貴州 貴陽 550003)
0 引言
微電網(wǎng)是實(shí)現(xiàn)分布式能源高效利用的一種解決方式。微電網(wǎng)具有雙重角色,既能與主網(wǎng)并網(wǎng)運(yùn)行,也能斷開與主網(wǎng)的連接,轉(zhuǎn)為孤島運(yùn)行。微電網(wǎng)不僅可以向主網(wǎng)提供功率支撐,滿足對(duì)主網(wǎng)輔助服務(wù)的需要,也是優(yōu)良的電能供給者,作為一個(gè)可定制電源,滿足用戶多樣化的用電需求,這些優(yōu)勢的發(fā)揮依賴于微電網(wǎng)控制技術(shù)的完善。頻率特性是微電網(wǎng)的重要特性之一,微電網(wǎng)在并網(wǎng)運(yùn)行時(shí),主網(wǎng)運(yùn)行的頻率即是微電網(wǎng)頻率。孤網(wǎng)運(yùn)行時(shí),微電網(wǎng)頻率由多個(gè)微電源的調(diào)頻特性共同決定。不同微電源的原動(dòng)機(jī)利用能源類型不同,同時(shí)原動(dòng)機(jī)對(duì)微電網(wǎng)的接口也有差別,一般微電源的基本接口有3種:即逆變器接口、同步發(fā)電機(jī)接口和異步發(fā)電機(jī)接口。而主網(wǎng)中原動(dòng)機(jī)基本上為同步發(fā)電機(jī),主網(wǎng)的頻率與有功功率存在著一次調(diào)頻關(guān)系,微電網(wǎng)同主網(wǎng)的原動(dòng)機(jī)類型差異,使得不能直接將主網(wǎng)功頻特性的分析方法運(yùn)用于微電網(wǎng),因此有必要對(duì)微電網(wǎng)有功功率和頻率關(guān)系進(jìn)行深入研究,由于一般光伏發(fā)電、風(fēng)力發(fā)電和潮汐能等可再生能源發(fā)電都廣泛地應(yīng)用了逆變器接口,因此本文討論了逆變器接口的控制方法,主要目的是通過控制逆變器來控制有功功率的輸出,從而達(dá)到調(diào)節(jié)系統(tǒng)頻率的作用,文獻(xiàn)[1]用自適應(yīng)控制方法調(diào)整有功功率,沿著均方誤差梯度負(fù)方向?qū)ふ易詈线m的下垂系數(shù),使微電網(wǎng)頻率控制在允許范圍內(nèi)。文獻(xiàn)[2]采用魯棒控制方法優(yōu)化了下垂控制,提高了在下垂控制策略中電壓和頻率的精度。文獻(xiàn)[3]引入電壓補(bǔ)償環(huán)節(jié)和頻率補(bǔ)償環(huán)節(jié),改進(jìn)了功率環(huán)反饋控制器,降低了系統(tǒng)頻率和母線電壓誤差。本文在分析了逆變器的有功功率—頻率下垂曲線的基礎(chǔ)上,在功率反饋環(huán)前加入了PI控制環(huán)節(jié),改進(jìn)了下垂控制策略的傳遞函數(shù),并且將采用改進(jìn)下垂控制的DG作為主源,實(shí)現(xiàn)了主從控制的微電網(wǎng)無差調(diào)頻。
1 逆變器控制策略
1.1 改進(jìn)下垂控制原理
下垂控制模擬了主網(wǎng)發(fā)電機(jī)的調(diào)頻特性,人為地在逆變器控制策略中加入了有功功率—頻率下垂曲線,不斷地微調(diào)逆變器輸出的頻率,從而滿足負(fù)荷有功功率的需求。下垂控制結(jié)構(gòu)如圖1所示。圖中Udc為逆變器直流電壓,Vn為逆變器輸出電壓,in為逆變器輸出電流,R、L和C為濾波器的等值電阻、電感和電容,Un為電網(wǎng)電壓,iL為負(fù)載電流,ic為電容電流,功率檢測模塊通過測量逆變器輸出的瞬時(shí)電壓和電流計(jì)算出瞬時(shí)功率P,將瞬時(shí)功率同給定的參考功率P0相比較,可得到擾動(dòng)功率ΔP。
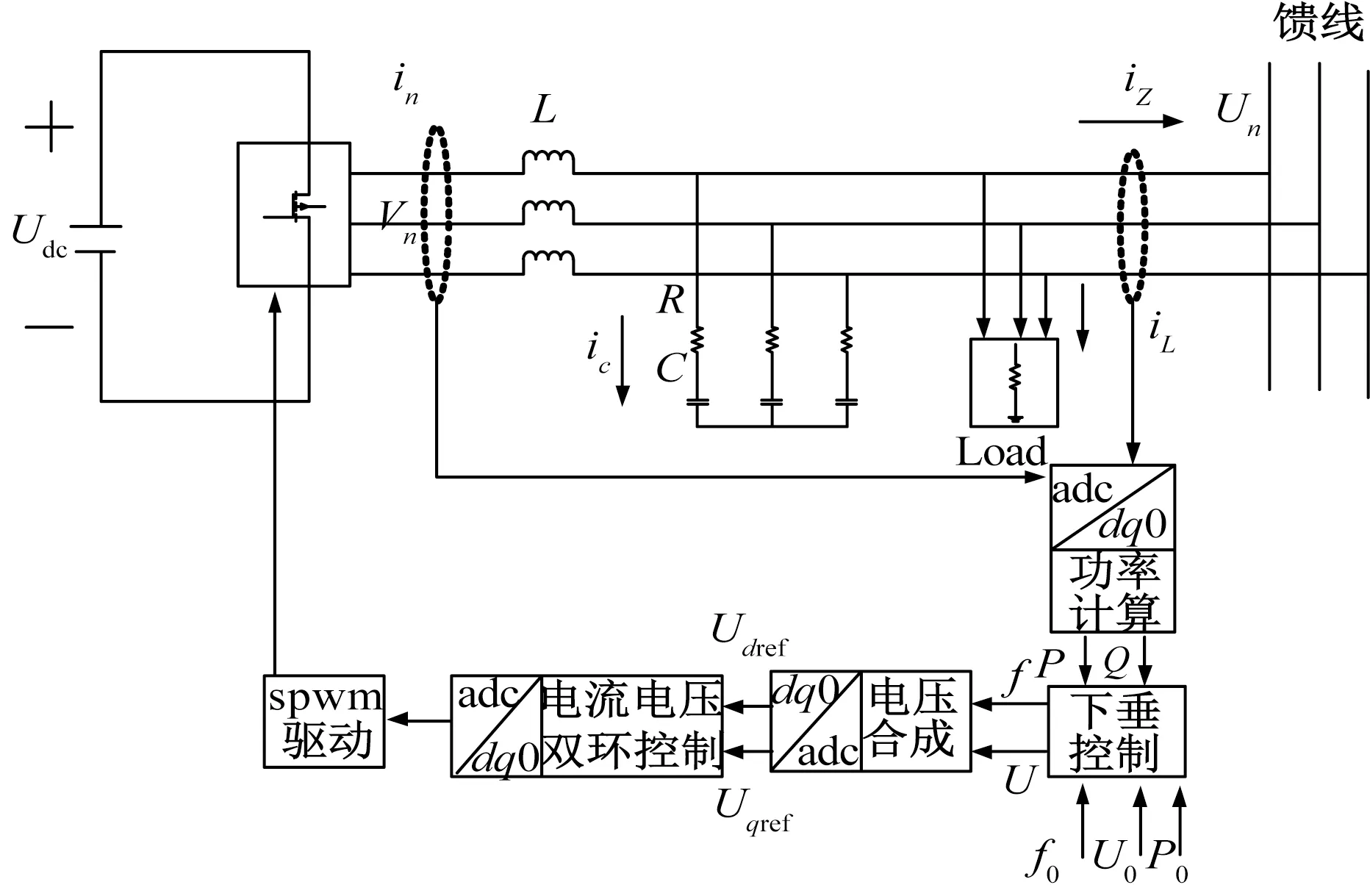
圖1 下垂控制結(jié)構(gòu)圖
通過圖2所示的下垂特性曲線1可以直觀地展現(xiàn)出頻率的調(diào)整過程。
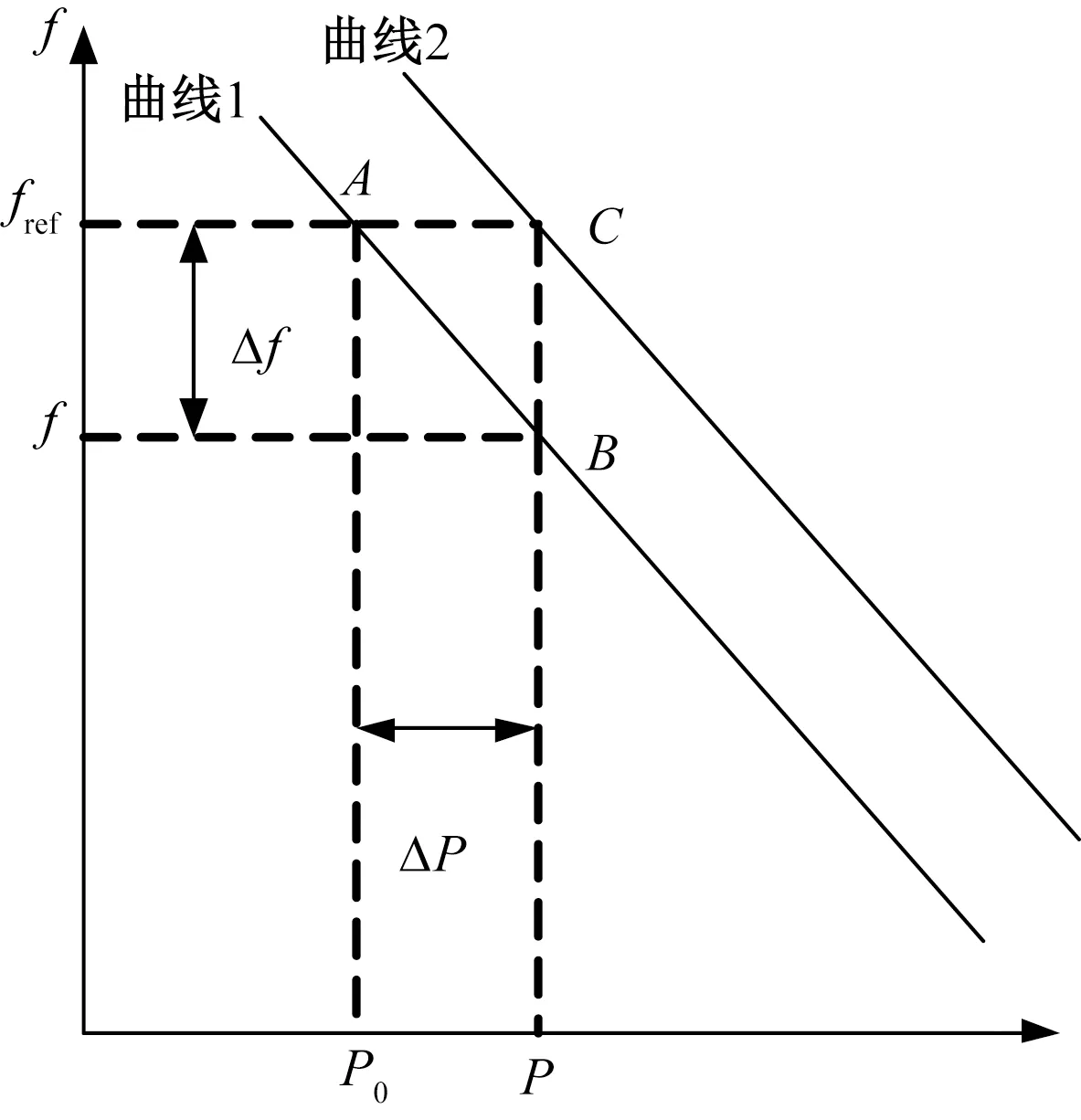
圖2 下垂特性曲線
逆變器初始工作在A點(diǎn),此時(shí)輸出的有功功率為額定功率,頻率為額定頻率fref,當(dāng)負(fù)荷發(fā)生變化增加ΔP,此時(shí)由于下垂控制作用工作點(diǎn)沿著下垂曲線移動(dòng)到B點(diǎn),輸出的頻率下降Δf,達(dá)到新的穩(wěn)定工作點(diǎn)時(shí)的頻率為f,由此實(shí)現(xiàn)了系統(tǒng)有功功率的合理分配,調(diào)整輸出的有功功率P必須滿足條件:0≤P≤Pmax,頻率下垂系數(shù)可以表示為下式:
(1)
其中,Pmax為逆變器頻率下降最大時(shí)允許輸出的最大有功功率,P0為逆變器工作在額定頻率時(shí)輸出的有功功率,fref為微電網(wǎng)的額定頻率,P、f為系統(tǒng)在實(shí)際工作點(diǎn)的參數(shù)。可見,這種人為的下垂控制可以實(shí)現(xiàn)逆變器功率跟隨負(fù)載功率的自動(dòng)調(diào)整,最終達(dá)到功率平衡,但是犧牲了系統(tǒng)頻率的穩(wěn)態(tài)指標(biāo),而且傳統(tǒng)下垂系數(shù)是一個(gè)常數(shù),對(duì)于環(huán)境適應(yīng)性較差,不能夠滿足微電網(wǎng)負(fù)荷擾動(dòng)變化較大的情況。如果此時(shí)將下垂曲線1保持斜率不變向右平移,使逆變器的工作點(diǎn)變?yōu)镃點(diǎn),由下垂曲線2可知,可使頻率恢復(fù)到fref,這樣,當(dāng)負(fù)荷發(fā)生變化時(shí),不斷地修正P0的值,使逆變器的工作點(diǎn)平移到下垂曲線2的C點(diǎn),即可以實(shí)現(xiàn)無差調(diào)頻。本文在功率反饋前加入了PI控制器,設(shè)計(jì)的無差調(diào)頻控制策略的傳遞函數(shù)如圖3所示。
(2)
式(2)即是起到無差調(diào)頻作用的比例積分控制環(huán)節(jié),其傳遞函數(shù)用圖3中的虛線部分表示。在負(fù)載功率變化的過程中,實(shí)時(shí)檢測逆變器的輸出頻率,作為反饋信號(hào)同參考頻率作比較,得到的誤差信號(hào)經(jīng)過PI控制器調(diào)整,用于補(bǔ)償系統(tǒng)頻率,直到微電網(wǎng)輸出功率同負(fù)載功率達(dá)到平衡,頻率恢復(fù)到額定值。
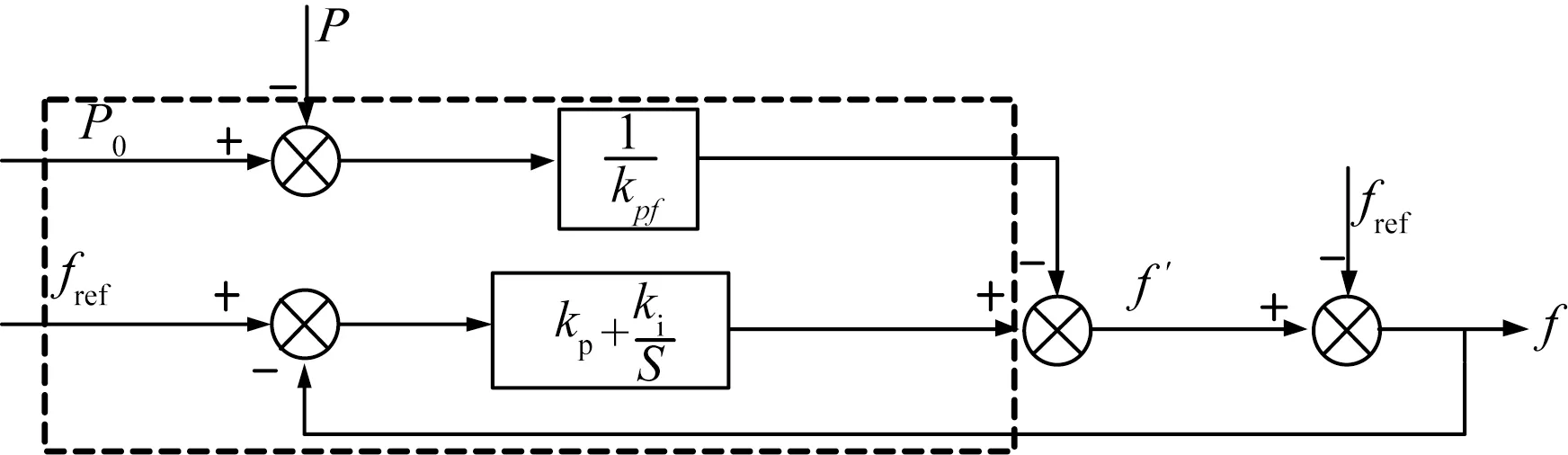
圖3 無差調(diào)頻策略傳遞函數(shù)
下垂控制結(jié)構(gòu)圖1中的PWM逆變器一般采用圖4所示的電壓電流雙閉環(huán)控制,外環(huán)控制回路電壓,調(diào)整電壓波形的影響,內(nèi)環(huán)是電流控制環(huán),用于提高系統(tǒng)的動(dòng)態(tài)性能,電壓控制環(huán)將逆變器輸出的瞬時(shí)電壓同電壓參考值相比較,得到的誤差信號(hào)通過比例積分控制器調(diào)節(jié)后作為電流控制環(huán)的參考值,電流控制環(huán)將逆變器輸出的瞬時(shí)電流同參考電流相比較,得到的誤差信號(hào)經(jīng)過比例控制器運(yùn)算,得到內(nèi)環(huán)的控制信號(hào),然后送入PWM調(diào)制器產(chǎn)生PWM波。
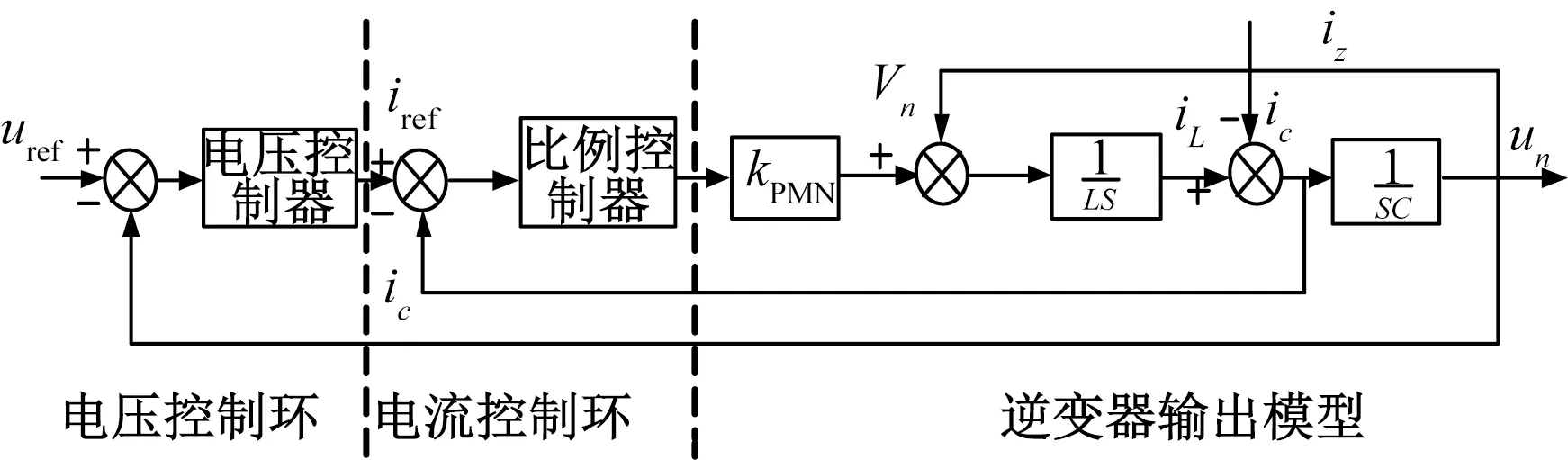
圖4 逆變器電壓電流雙環(huán)控制
1.2 PQ控制原理
PQ控制(恒功率控制)是指逆變器按照參考功率值輸出有功功率和無功功率,分布式發(fā)電系統(tǒng)被處理為恒功率輸出,采用PQ控制的DG不參與電壓和頻率調(diào)節(jié),并網(wǎng)時(shí)其電壓和頻率由主網(wǎng)提供剛性支撐,孤網(wǎng)運(yùn)行時(shí)電壓和頻率由主控微源提供支撐。逆變器通過控制輸出電壓來控制輸出電流,進(jìn)而控制逆變器輸出的有功功率和無功功率,同時(shí)用鎖相環(huán)節(jié)獲得電網(wǎng)頻率。PQ控制框圖如圖5所示,圖中Vn為逆變器輸出電壓,in為逆變器輸出電流,R、L和C為濾波器的等值電阻、電感和電容,Pref、Qref為給定的參考有功功率和無功功率。
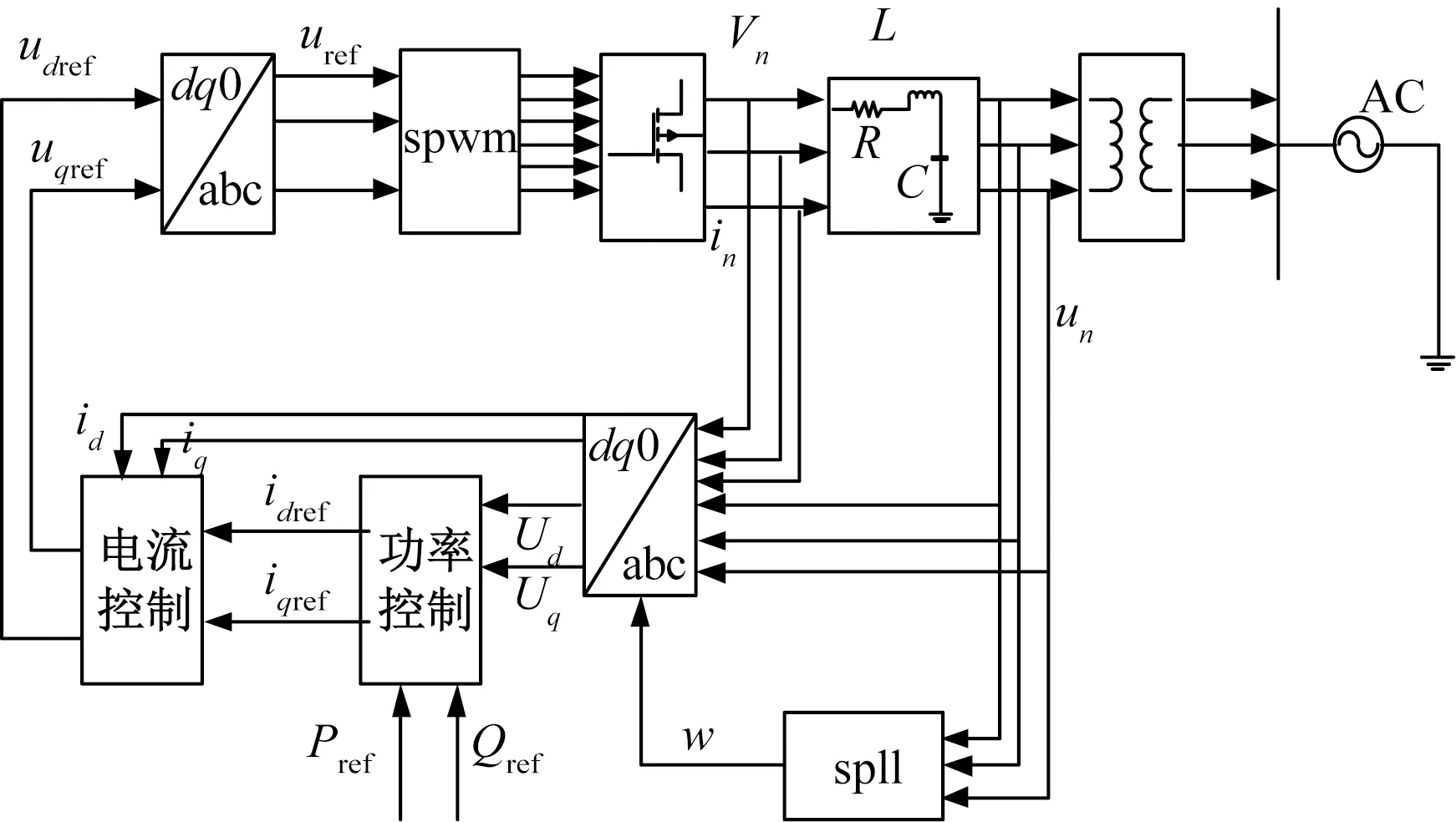
圖5 PQ控制框圖
根據(jù)圖5可以寫出逆變器輸出電路的電壓方程如下式:
(3)
對(duì)式(3)用Park變換將abc坐標(biāo)系變換到dq軸旋轉(zhuǎn)坐標(biāo),得到逆變器的輸出電路電壓方程為:
(4)
式中:ωLiq和ωLid為微分環(huán)節(jié)在Park變換過程中的dq交叉耦合項(xiàng),電網(wǎng)電壓un可以表示為下式:
(5)
將電網(wǎng)電壓式(5)進(jìn)行Park變換:
(6)
逆變器輸出的有功和無功可以表示為:
(7)
將式(6)代入式(7)中,可以得到
(8)
從上式(8)可以看出,如果電網(wǎng)電壓保持恒定,有功功率P跟d軸電流成線性關(guān)系,無功功率Q跟q軸電流成線性關(guān)系,控制dq軸的電流就可以實(shí)現(xiàn)功率的控制。將電網(wǎng)電壓u和dq軸交叉耦合項(xiàng)整合為Vd2和Vq2,重新定義公式(4)為:
(9)
從上式(9)可以看出,分別控制dq軸上的電流就能控制電壓Vd1和Vq1,根據(jù)這個(gè)關(guān)系可以設(shè)計(jì)電流內(nèi)環(huán)控制器,通常采用PI控制器。
(10)
由此可以得到功率控制環(huán)和電流控制環(huán)的結(jié)構(gòu)框圖如圖6所示。輸出的有功功率P和無功功率Q與參考功率相比較,經(jīng)過PI控制器調(diào)節(jié)后作為電流控制環(huán)的參考電流idref,再同逆變器輸出電流id相比較,得到的誤差電流經(jīng)過PI控制器調(diào)節(jié)后加上dq交叉耦合項(xiàng),可得到參考電壓,反Park變化后,三相參考電壓送入PWM產(chǎn)生器后便可形成控制逆變器的PWM波。
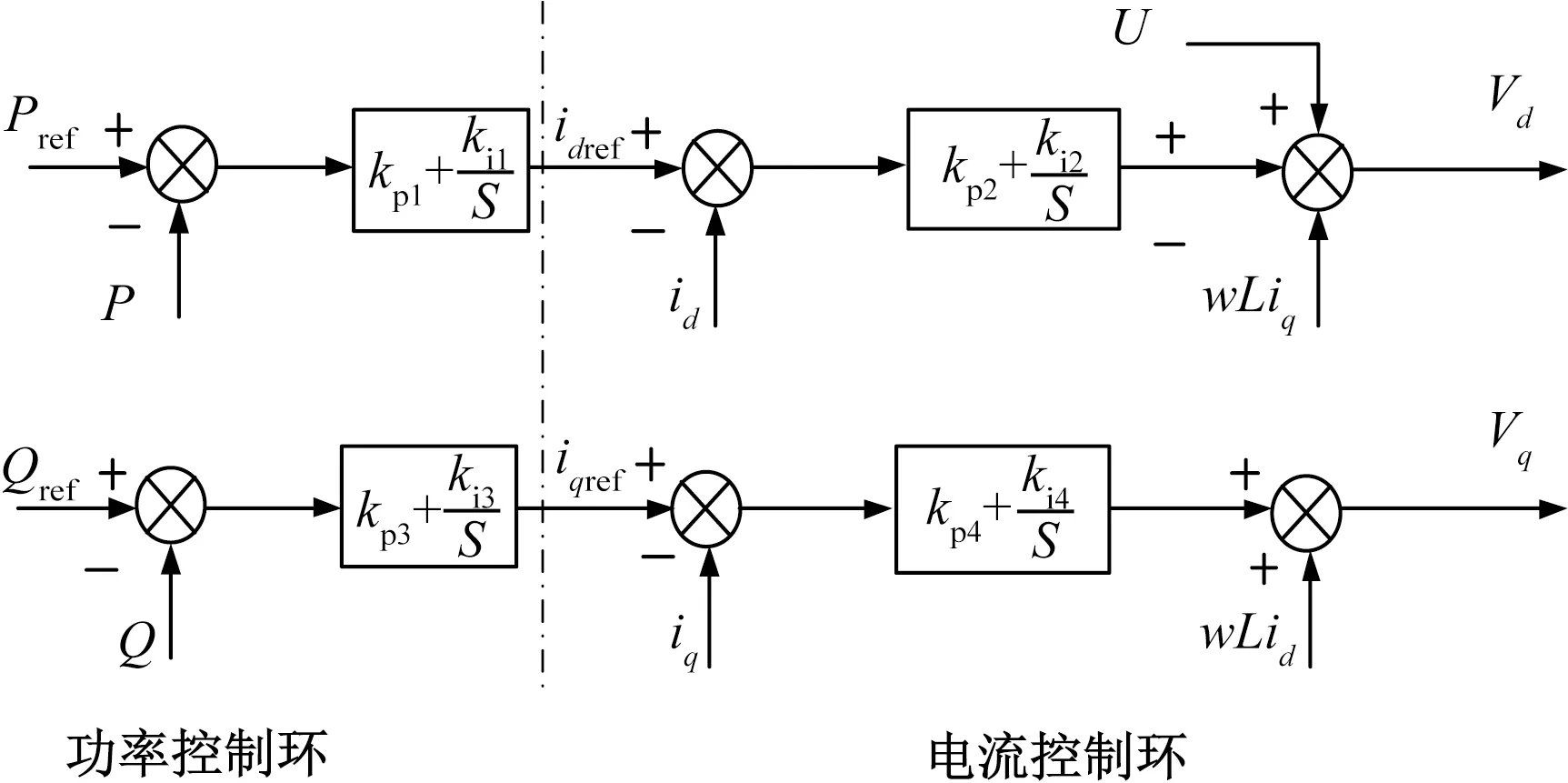
圖6 功率電流雙環(huán)控制的結(jié)構(gòu)框圖
2 微電網(wǎng)的主從控制策略
主從控制策略是微電網(wǎng)主要控制方式之一,當(dāng)微電網(wǎng)并網(wǎng)運(yùn)行時(shí),所有的DG均采用PQ控制,向主網(wǎng)提供或者消耗功率,頻率和電壓幅值由主網(wǎng)提供剛性支撐。離網(wǎng)運(yùn)行時(shí)將微電網(wǎng)中一個(gè)或者幾個(gè)DG作為主控微源,通常主控微源都采用V/F控制,本文中的主控DG采用改進(jìn)下垂控制,為孤網(wǎng)中的其他DG提供頻率和電壓支撐。由于負(fù)荷的瞬時(shí)波動(dòng)一般都是由主控DG出力來達(dá)到功率平衡,所以要求主控DG有充足的容量,文中主要研究改進(jìn)下垂控制的主控DG能否實(shí)現(xiàn)微電網(wǎng)內(nèi)部的無差調(diào)頻,不研究微源內(nèi)部情況,所以文中的微源都用直流電源代替。為了驗(yàn)證改進(jìn)下垂控制在微電網(wǎng)運(yùn)行的有效性,設(shè)計(jì)了含有3個(gè)微源的主從控制結(jié)構(gòu)如圖7所示。負(fù)荷1、負(fù)荷2為可變負(fù)荷,負(fù)荷3為可中斷負(fù)荷,當(dāng)微電網(wǎng)運(yùn)行在高峰時(shí)段或者緊急狀況時(shí)可以切斷。
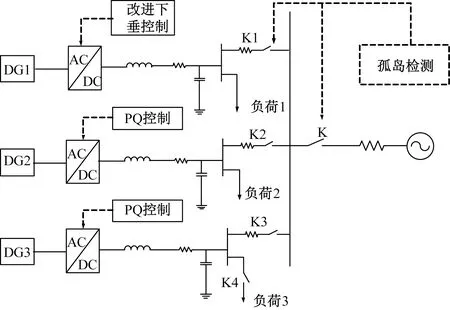
圖7 主從控制結(jié)構(gòu)
微網(wǎng)并網(wǎng)運(yùn)行時(shí),并網(wǎng)開關(guān)K、K2、K3閉合, DG2、DG3采用PQ控制。開關(guān)K斷開,K1閉合,這一動(dòng)作看成微網(wǎng)運(yùn)行狀態(tài)由并網(wǎng)切換到孤網(wǎng),DG1設(shè)置為主源,采用改進(jìn)下垂控制,DG2、DG3控制方式不變。微電網(wǎng)主從控制開關(guān)詳細(xì)動(dòng)作設(shè)置及其負(fù)荷有功功率變化如表1所示。
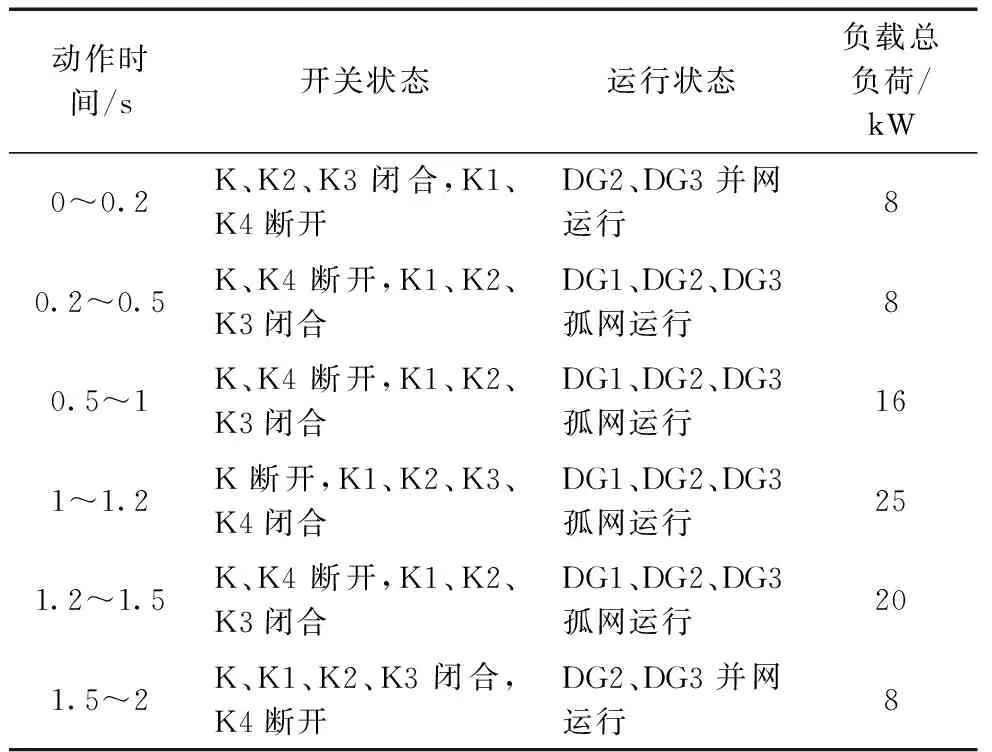
表1 主從微電網(wǎng)運(yùn)行狀態(tài)
3 仿真分析
為了驗(yàn)證主源采用改進(jìn)下垂控制的主從控制策略能實(shí)現(xiàn)微電網(wǎng)孤網(wǎng)運(yùn)行的無差調(diào)頻,基于圖7和表1所示微電網(wǎng)的結(jié)構(gòu)和運(yùn)行狀態(tài),在MATLAB/SIMULINK仿真平臺(tái)上建立了如圖8所示的微電網(wǎng)模型。微電網(wǎng)的參數(shù)見表2。
(1)0.2 s時(shí)開關(guān)K動(dòng)作,微電網(wǎng)由并網(wǎng)切換到孤島運(yùn)行模式。
在0.2 s微電網(wǎng)與配電網(wǎng)斷開連接,輸出功率變化如圖9所示。微電網(wǎng)進(jìn)入孤網(wǎng)運(yùn)行后,主源DG1跟蹤負(fù)荷變化,輸出的有功功率降低。 DG2、DG3由于采用PQ控制,輸出的有功功率不變。微電網(wǎng)頻率波形變化如圖10所示,當(dāng)主控微源DG1采用傳統(tǒng)下垂控制時(shí),微電網(wǎng)由并網(wǎng)運(yùn)行向孤島運(yùn)行切換的過程中,系統(tǒng)頻率會(huì)有細(xì)微波動(dòng),在0.1 s頻率達(dá)到穩(wěn)定狀態(tài)后偏離頻率額定值。當(dāng)主控微源DG1采用改進(jìn)下垂控制時(shí),微電網(wǎng)由并網(wǎng)運(yùn)行向孤島運(yùn)行切換的過程中,系統(tǒng)頻率幾乎沒有變化。

圖8 微電網(wǎng)仿真模型

DG1Vdc=800 V,R=0.01 Ω,L=0.6×10-3 H,C=1.5×10-3 H,fref=50 Hz,V0=380 V,Pn1=0.6×104 WDG2Vdc=800 V, R=0.01 Ω,L=3×10-3 H,C=10×10-6 F,Pn1=6.5×103 W,Qn1=0 VarDG3Vdc=800 V, R=0.01 Ω,L=3×10-3 H,C=10×10-6 F,Pn2=5×103 W, Qn2=0 Var下垂控制電流電壓雙環(huán)控制器:kp=10,ki=100下垂系數(shù):kpf=×10-5改進(jìn)下垂控制PI控制器:kp=0.01,ki=1 500電流電壓雙環(huán)控制器:kp=10,ki=100下垂系數(shù):kpf=8×10-5PQ控制SPLL:kp=60,ki=1 400內(nèi)環(huán)PI控制器參數(shù):kp=12.5,ki=1 800
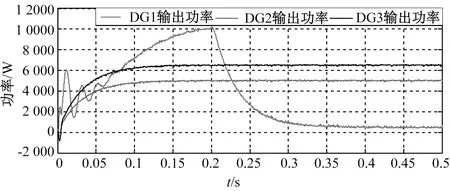
圖9 并網(wǎng)切換到孤島各DG有功功率變化
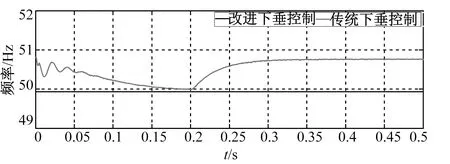
圖10 并網(wǎng)切換到孤島微電網(wǎng)頻率變化
(2)0.2~1.5 s過程中微電網(wǎng)工作在孤網(wǎng)運(yùn)行模式,變化負(fù)荷功率模擬快速投切負(fù)荷。
在孤島運(yùn)行時(shí),負(fù)載功率變化完全由主控微源DG1跟蹤,在0.5 s、1 s時(shí)切換負(fù)荷開關(guān),向系統(tǒng)投入負(fù)荷,1.2 s時(shí)快速切除可中斷負(fù)荷,主源DG1輸出功率由圖11可知,在投入負(fù)荷時(shí)DG1輸出有功功率增加,切除負(fù)荷時(shí)DG1輸出有功功率減少,可知DG1下垂控制模型能夠較好地跟隨負(fù)荷擾動(dòng),保證了孤島運(yùn)行的功率平衡。DG2,DG3由于采用PQ控制,其有功功率仍然按照參考功率輸出,在投切負(fù)荷時(shí)輸出的功率不發(fā)生變化。
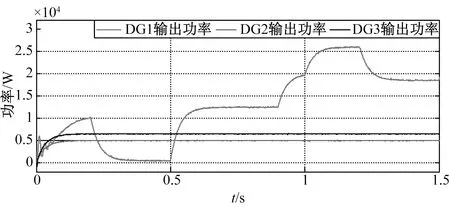
圖11 孤網(wǎng)運(yùn)行下投負(fù)荷時(shí)各DG有功功率變化
頻率變化如圖12所示,當(dāng)主控微源DG1采用傳統(tǒng)下垂控制時(shí),根據(jù)下垂特性曲線在投入負(fù)荷的過程中,為了實(shí)現(xiàn)逆變器輸出功率和負(fù)載功率相平衡,頻率不斷在額定值附近波動(dòng),雖然能夠使頻率控制在允許范圍內(nèi),但是穩(wěn)態(tài)時(shí)頻率存在著靜態(tài)誤差,當(dāng)主控微源DG1采用含有積分控制的改進(jìn)下垂控制,頻率變化由圖12可以看出,在外部快速投切負(fù)荷的過程中,頻率穩(wěn)定在額定值,在微電網(wǎng)孤網(wǎng)運(yùn)行時(shí)頻率保持穩(wěn)定實(shí)現(xiàn)了無差調(diào)頻。
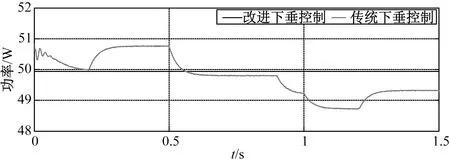
圖12 孤網(wǎng)運(yùn)行下投負(fù)荷時(shí)頻率變化
(3)1.5 s時(shí)使開關(guān)K閉合,微電網(wǎng)由孤網(wǎng)運(yùn)行方式切換到并網(wǎng)運(yùn)行。
如圖13所示,在運(yùn)行模式切換過程中,DG1輸出有功功率波動(dòng)較大,約在0.3 s后達(dá)到穩(wěn)定狀態(tài),主控微源DG1在孤網(wǎng)運(yùn)行到并網(wǎng)運(yùn)行切換的過程中輸出的有功功率明顯減少,說明了并網(wǎng)后一部分負(fù)荷由主網(wǎng)承擔(dān)。而DG2、DG3仍然采用的PQ控制,輸出的功率維持不變。主控微源DG1分別采用傳統(tǒng)下垂控制和改進(jìn)下垂控制的系統(tǒng)頻率仿真曲線如圖14所示,微電網(wǎng)在并網(wǎng)運(yùn)行時(shí)的頻率由主網(wǎng)提供支撐,主源在采用傳統(tǒng)下垂控制時(shí),在運(yùn)行模式切換過程中頻率波動(dòng)較大,約在0.4 s過后達(dá)到穩(wěn)態(tài)。改進(jìn)下垂控制在運(yùn)行模式切換過程中仍然能夠保證系統(tǒng)頻率的穩(wěn)定,進(jìn)一步說明了改進(jìn)下垂控制在微電網(wǎng)中的可靠性。
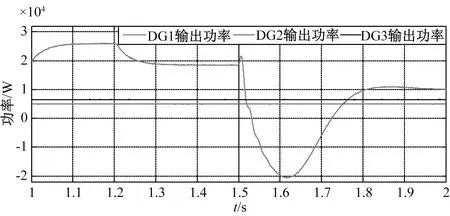
圖13 孤網(wǎng)切換到并網(wǎng)各DG有功功率變化
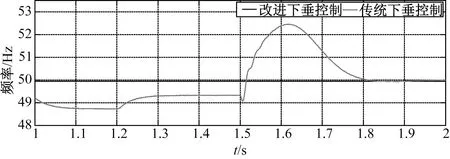
圖14 孤網(wǎng)切換到并網(wǎng)各DG頻率變化
4 結(jié)論
本文針對(duì)傳統(tǒng)的下垂控制策略的不足,改進(jìn)了下垂控制策略,在有功功率反饋前加入了PI控制環(huán)節(jié),并且將主從控制的主控微源采用改進(jìn)下垂控制,仿真了微電網(wǎng)的并網(wǎng)、快速投切負(fù)荷、孤網(wǎng)幾種運(yùn)行狀態(tài),下垂控制模型能夠很好地跟蹤到負(fù)荷變化,保證微電網(wǎng)運(yùn)行的功率平衡。主控微源采用改進(jìn)下垂控制與采用傳統(tǒng)下垂控制方式相比較,前者不僅消除了孤島運(yùn)行時(shí)投切負(fù)荷的頻率靜態(tài)誤差,實(shí)現(xiàn)了頻率的無差調(diào)節(jié),而且在微電網(wǎng)并網(wǎng)和孤網(wǎng)運(yùn)行模式切換過程中,很大程度地降低了頻率波動(dòng)。由于本文主要研究微電網(wǎng)的無差調(diào)頻控制策略,直接將微源等效為直流電源,忽略了微電源運(yùn)行特性對(duì)微網(wǎng)的影響,下一步有待展開對(duì)微電源原動(dòng)機(jī)運(yùn)行特性的研究。
