發射平臺擺桿機構可靠性分析
2018-11-13 10:06:16,,,
現代機械 2018年5期
,,,
(北京航天發射技術研究所,北京100076)
0 引言
隨著新一代運載火箭的發展,發射流程應具備垂直組裝、垂直測試、垂直轉運(三垂模式)的能力。發射平臺是實現三垂發射模式的重要一環,而擺桿機構又是發射平臺的關鍵設備,主要用于鋪設各種加注、供氣、電纜、空調等管線路,在運輸過程中擺桿保持各種管路、連接器、電纜的狀態不變,起飛前帶動脫落的連接器、管路、接頭等擺開到安全范圍之內[1-2]。因此擺桿機構功能的可靠性水平高低對保證發射平臺是否具有三垂模式能力具有重要意義。由此可知對擺桿機構可靠性進行研究具有現實和迫切的工程意義,擺桿機構如圖1。

圖1 發射平臺擺桿機構
由于擺桿機構屬于發射平臺新研設備,尚未有文獻對此類擺桿機構運動性能進行可靠性建模及計算,僅可以從文獻[3-4]借鑒,分析類似機構運動可靠性的方法和思路。
本文從擺桿機構運動全過程出發,分析其運動機理,考慮擺桿機構實際受力情況,建立了擺桿機構啟動失效、連續運動失效、運動不到位可靠性模型,并根據實際工程算例,計算出可靠性結果。
1 擺桿機構運動故障原因分析
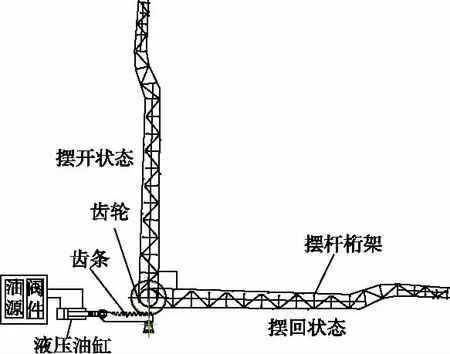
圖2 擺桿機構原理圖
擺桿機構由液壓油缸、齒條、齒輪、擺桿桁架等組成[5],如圖2。其工作原理是:液壓油缸在液壓油的作用下,向右伸出油桿,帶動齒條向右運動,齒條與齒輪嚙合,齒輪逆時針旋轉,同時與齒輪固接的擺桿桁架從初始擺回狀態運動到最終擺開狀態,整個運動過程,角位移90°。通過分析其功能和組成特點,可看出擺桿機構是否工作正常與液壓油壓力、擺桿桁架鋪設管路及連接器重力、擺桿桁架自重及風載等相互匹配有關。
在擺桿擺開的運動階段,由于發射場的特殊環境以及擺桿桁架自身長、細的結構特點,氣動載荷在擺開運動中變化較大,此外受桁架長、細特點,風載力矩在過程中同樣也存在變化。這樣可能存在液壓油缸中的油桿無法克服阻力,而發生卡滯。同時,機構制造的誤差、裝配誤差可能導致運動定位失效,使得擺桿無法擺開90°。擺桿擺開功能的正常實現,需要保證擺桿運動機構工作的各階段,即啟動、連續運動,運動到位三階段的工作可靠,分析三階段事件的故障表現及故障原因。
2 擺桿機構擺開過程可靠性建模
結合擺桿機構運動故障原因分析,建立了擺桿機構各階段事件可靠性模型及求解方式。如表1所示。
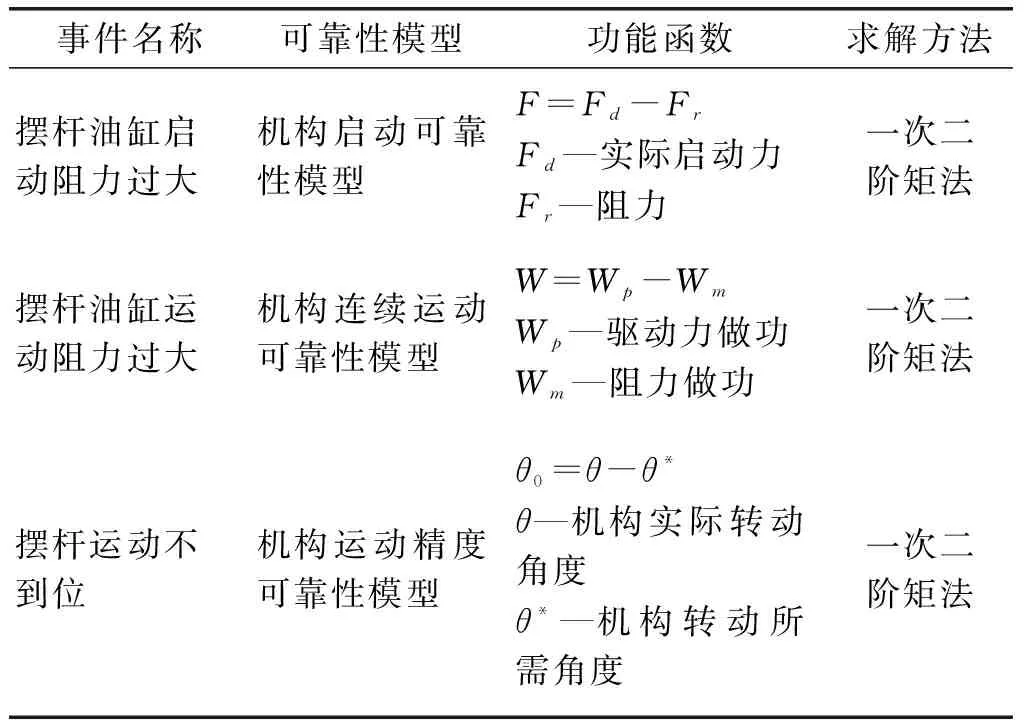
表1典型可靠性模型說明
2.1 擺桿油缸啟動阻力過大
擺桿油缸為單向油缸,擺桿擺開運動方向如圖3,正腔油壓作用在活塞上,力為Fd,風載、摩擦力、反腔壓力油壓等阻力最終等效于作用在反腔活塞這一側力Fr。在啟動階段,擺桿要實現擺開運動,必須保證Fd大于Fr,即擺桿在啟動階段可靠性系數為β1:
(1)
擺桿油缸啟動阻力過大失效概率:
Pf1=1-Φ(β1)
(2)
式中:Φ(·)為標準正態分布函數。
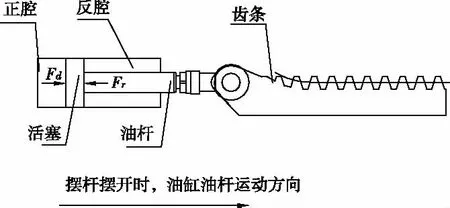
圖3 擺桿油缸示意圖
2.2 擺桿連續運動阻力過大
在擺桿運動過程中,要使運動過程無卡滯、停頓,必須油桿速度大于0,保證齒條驅動齒輪轉動,從而實現連續運動。在擺開過程中,驅動力Fd做功為Wp,阻力Fr做功Wm,Wp必須大于Wm,才能保證油桿速度大于0。如圖4。

圖4 擺桿油缸運動示意圖
驅動功Wp與阻力功Wm分別為:
(3)
(4)
擺桿在連續運動階段可靠性系數β2:
(5)
擺桿油缸連續運動阻力過大失效概率:
Pf2=1-Φ(β2)
(6)
式中:Φ(·)為標準正態分布函數。
2.3 擺桿運動不到位
擺桿運動機構,考慮其存在尺寸、磨損等偏差,使得其運動偏差具有一定的不確定性,其運動精度具有隨機性,所以為保證擺桿桁架的運動精度,對其進行偏差分析和可靠性定量計算是非常必要的。擺桿機構齒條齒輪運動如圖5所示,齒條運動到位實際行程為L,帶動齒輪實際轉動角度θ,幾何關系式為:
θ=L/R
(7)
式中:R為齒輪半徑。
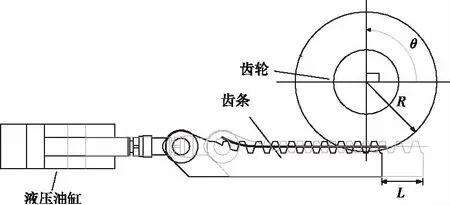
圖5 擺桿機構齒條齒輪運動圖

圖6 擺桿桁架運動圖
擺桿桁架轉動角度即為齒輪實際轉動角度θ,擺桿桁架運動圖如圖6所示:擺桿桁架長為l,擺桿擺回狀態為OA,理論擺開狀態為OA1,對應角度為θ*;OA2狀態為擺開到位,對應角度為θ;OA3狀態為擺開不到位,由幾何關系可知,OA2狀態下,對應的擺桿擺開位置間距ΔS大于0,考慮桁架為細長結構,有:
ΔS=(θ-θ*)·l
(8)
綜合式(7)、(8),有:
ΔS=(L/R-θ*)·l
(9)
擺桿運動不到位概率為:
Pf2=P{ΔS<0}
(10)
ΔS服從正態分布,有擺桿在運動到位階段可靠性系數β3:
(11)

即擺桿運動不到位失效概率:
Pf3=1-Φ(β3)
(12)
式中:Φ(·)為標準正態分布函數。
3 工程算例
3.1 擺桿油缸啟動阻力過大失效可靠性分析

圖7 驅動力、阻力與 油桿行程關系圖
擺桿油缸力大小腔傳感器實測數據,如圖7。
將啟動時刻(油桿行程為0 mm)數據代入(1)。取CFd=0.12,CFr=0.08,則擺桿在啟動階段可靠性系數為:
即擺桿油桿啟動阻力過大失效概率為:
Pf1=1-Φ(β1)≈5.297×10-5
3.2 擺桿連續運動阻力過大失效可靠性分析
在擺桿運動過程中,當油桿運動到某一位移Lx時,活塞驅動功和阻力功分別為驅動力、阻力關于位移積分。

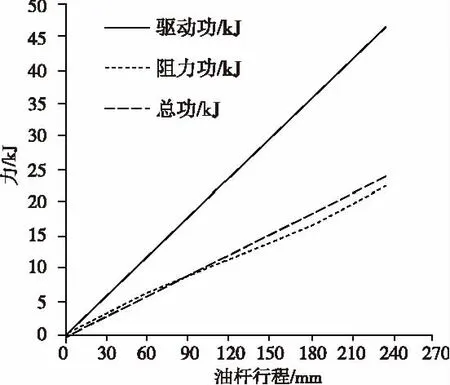
圖8 驅動功、阻力功、總功與 油桿位移關系圖
由圖8可知,驅動功持續大于阻力功,將驅動功、阻力功數據代入式(5)(6)。取CWp=0.05,CWm=0.05,經計算可知擺桿油缸連續運動阻力過大失效概率為:Pf2≈0。
3.3 擺桿運動不到位


表2擺桿參數
擺桿機構運動失效概率:Pf=Pf1+Pf2+Pf3≈8.743×10-5,Pf<10-5,符合機構運動可靠性指標要求。
4 結論
1)結合擺桿機構運動功能分階段特點,總結出機構運動失效可能出現的3類模式:擺桿油缸啟動阻力失效、擺桿連續運動失效以及擺桿運動不到位失效,并分別建立相應可靠性模型,進行了可靠性計算;
2)對可靠性求解分析,擺桿在連續運動中發生卡滯失效可能性很小;存在擺桿油缸啟動阻力過大失效和擺桿運動不到位失效的可能;
3)設計擺桿機構時,在不影響擺桿油缸腔體強度正常使用的前提下,可以通過提高油缸正腔壓力來確保擺桿油缸啟動功能正常;此外,須控制擺桿行程、齒輪半徑及擺桿長度的加工精度,避免出現擺桿運動不到位失效。通過上述舉措提高擺桿機構運動機構可靠性。
