基于神經(jīng)網(wǎng)絡(luò)和最近鄰相似度的動臂實例檢索
2018-11-05 02:54:58閆二樂高領(lǐng)付林述溫林航
機(jī)械制造與自動化 2018年5期
關(guān)鍵詞:結(jié)構(gòu)設(shè)計
閆二樂,高領(lǐng)付,林述溫,林航
(福州大學(xué) 機(jī)械工程及其自動化學(xué)院,福建 福州 350108)
0 引言
方案設(shè)計是一個結(jié)構(gòu)參數(shù)多、約束復(fù)雜和多目標(biāo)的工程設(shè)計問題。方案設(shè)計是最富有創(chuàng)造性的階段,方案設(shè)計的質(zhì)量會影響動臂的性能。雖然方案設(shè)計的實際投入為總開發(fā)成本的5%,但是卻決定了產(chǎn)品總成本的70%[1]。近年來方案設(shè)計的思想、方法和理論有很大的進(jìn)展,但其在復(fù)雜工程機(jī)械方面應(yīng)用較少。傳統(tǒng)的方案設(shè)計方法主要依靠設(shè)計人員的經(jīng)驗通過試湊等方法實現(xiàn),而對于復(fù)雜的工程機(jī)械產(chǎn)品需要大量的經(jīng)驗知識,且傳統(tǒng)的方案設(shè)計依賴設(shè)計人員的經(jīng)驗難以滿足智能制造新的需求。形態(tài)學(xué)矩陣方案設(shè)計方法,從功能角度分析列舉組合方案解,但組合的方案多時難以逐一排除。專家系統(tǒng)在設(shè)計復(fù)雜的工程機(jī)械產(chǎn)品時,知識獲取效率低,難以滿足復(fù)雜的工程機(jī)械產(chǎn)品設(shè)計。
研究智能設(shè)計方法,以機(jī)器學(xué)習(xí)——人工神經(jīng)網(wǎng)絡(luò)的方法從歷史實例庫里面挖掘經(jīng)驗知識和設(shè)計規(guī)范,推理動臂的結(jié)構(gòu)方案設(shè)計——實例推理技術(shù)。基于實例推理(case based reasoning, CBR)是當(dāng)下人工智能方向與專家系統(tǒng)領(lǐng)域很有吸引力的一個方向,其主要的原理是運(yùn)用過去求解問題的經(jīng)驗和實例來獲取當(dāng)前設(shè)計問題的一個類比推理模式[2]。其核心部分包括案例表示、案例推理算法及案例相似度計算3大部分,其應(yīng)用很廣泛,如故障診斷、工程規(guī)劃和產(chǎn)品設(shè)計等領(lǐng)域[3-6]。Ning Lu等提出一種在實例推理過程中2個階段的實例編輯技術(shù)消除冗余實例[7]。羅晨等提出運(yùn)用UML建模語言實現(xiàn)對實例的表示,并用幾何形狀和位置拓?fù)潢P(guān)系并行的推理算法實現(xiàn)對實例推理[8]。陳維克等提出一種動力學(xué)優(yōu)化技術(shù)與實例匹配相結(jié)合的推理方法,解決切削參數(shù)選擇的問題[9]。孟秀麗提出將裝配實例分解為功能需求、裝配行為和過程機(jī)制3個層次并依據(jù)裝配過程類型和零件類型進(jìn)行相似系數(shù)計算[10]。
綜上所述,CBR技術(shù)的實現(xiàn)方法有很多難點,其中比較重要的難點為:參數(shù)權(quán)重的設(shè)置和檢索速度。設(shè)計人主觀設(shè)置權(quán)重系數(shù),直接影響推理結(jié)果的準(zhǔn)確性和實用性。本文提出基于實例推理的動臂結(jié)構(gòu)方案設(shè)計,采用概率神經(jīng)網(wǎng)絡(luò)的方法對實例進(jìn)行分類,以專家經(jīng)驗知識和客觀數(shù)據(jù)相結(jié)合的方法來確定最近鄰法的權(quán)重系數(shù),計算實例的相似度,解決權(quán)重設(shè)置問題,避免了設(shè)計人員的主觀因素影響實例推理。
1 動臂結(jié)構(gòu)方案設(shè)計模型
1.1 初始方案設(shè)計參數(shù)選擇
動臂結(jié)構(gòu)的方案設(shè)計主要解決動臂結(jié)構(gòu)類型配置的問題,動臂結(jié)構(gòu)類型直接決定了動臂的性能。配置類型主要包括液壓缸分布、動臂的類型(彎動臂、直動臂或分節(jié)式)、與斗桿的連接類型等。現(xiàn)有的很多實例與客戶需求的類型有相似之處,為運(yùn)用實例推理技術(shù)解決初始方案設(shè)計的問題帶來借鑒。
初始參數(shù)選擇也是初始方案設(shè)計的一個重要環(huán)節(jié),初始參數(shù)選擇是否合理會影響推理的動臂結(jié)構(gòu)配置方案。通過相關(guān)性分析,選擇與結(jié)構(gòu)特征關(guān)系比較大的參數(shù)作為初始方案設(shè)計的初始參數(shù):斗容、挖掘機(jī)范圍(最大挖掘深度、最大挖掘半徑、最大卸載高度、最大挖掘高度)、最大挖掘力、使用環(huán)境、工作質(zhì)量8個參數(shù)作為實例推理的依據(jù),通過建立的初始方案推理模型推理出實例庫中的動臂配置方案,選擇“最優(yōu)秀”的作為動臂結(jié)構(gòu)配置方案,完成動臂的初始方案設(shè)計。
1.2 動臂結(jié)構(gòu)方案設(shè)計模型
良好的推理機(jī)制是準(zhǔn)確找到目標(biāo)實例的前提[11],而推理算法是CBR技術(shù)最重要的技術(shù)之一。目前最常用的方法有最近鄰法、神經(jīng)網(wǎng)絡(luò)推理法和知識引導(dǎo)法。其中,最近鄰法由于概念清晰、計算簡單,被廣泛應(yīng)用于CBR系統(tǒng)中。最近鄰法一般分為KNN(k-nearest neighbor)推理和RNN(r-nearest neighbor)推理,這2種方法都比較容易實現(xiàn),但是在確定權(quán)重值(K和R)是其最難確定的。
為了解決權(quán)重確定和檢索速度問題,本文提出一種將神經(jīng)網(wǎng)絡(luò)分類與最近鄰法相結(jié)合的實例推理的方法。這種方法不僅避免主觀確定權(quán)重值,而且又提高了推理速度。實例推理模型首先對實例的參數(shù)進(jìn)行約簡,選擇相關(guān)性比較大的屬性參數(shù),并進(jìn)行無量綱化處理。再運(yùn)用概率神經(jīng)網(wǎng)絡(luò)進(jìn)行分類,確定新需求的實例所在的小類別內(nèi),運(yùn)用最近鄰距離法來進(jìn)行二次檢索,確定相似度選擇出最優(yōu)秀的實例作為新設(shè)計需求的依據(jù)。

圖1 實例推理模型
1.3 動臂結(jié)構(gòu)方案設(shè)計的流程
本文中通過收集多種挖掘機(jī)品牌動臂結(jié)構(gòu)的實例,涵蓋國內(nèi)外大部分的機(jī)型。針對大多數(shù)品牌挖掘機(jī)的應(yīng)用環(huán)境、功率、結(jié)構(gòu)特點有很多相似之處,對實例庫的動臂實例進(jìn)行聚類分析,實現(xiàn)動臂結(jié)構(gòu)實例的分層次管理。聚類的動臂實例庫將相似的動臂合并為一類,消除冗余實例對效率的影響。在進(jìn)行實例推理時要對動臂實例和結(jié)構(gòu)類型配置方案進(jìn)行編碼,為實例的管理和實例推理奠定基礎(chǔ),具體的工作流程如圖2所示。首先對輸入的推理模型的初選參數(shù)進(jìn)行歸一化處理,消除不同設(shè)計參數(shù)的量綱的影響;其次將實例輸入到概率神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練分類,最近鄰法對概率網(wǎng)絡(luò)的結(jié)果進(jìn)一步選擇,最后得到與現(xiàn)有實例最相近的動臂結(jié)構(gòu)類型配置方案。此外以分層次管理對實例推理,并將模型的概率網(wǎng)絡(luò)的權(quán)值和最近鄰距離的權(quán)值保存到知識庫中。
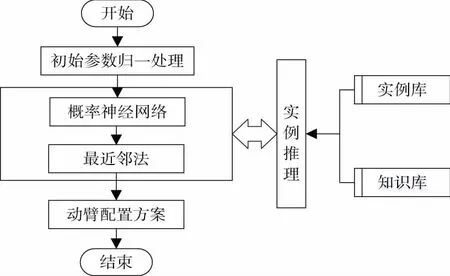
圖2 動臂結(jié)構(gòu)初始方案設(shè)計流程
2 神經(jīng)網(wǎng)絡(luò)訓(xùn)練與實例分類
2.1 編碼規(guī)則
本文根據(jù)新的設(shè)計需求的屬性參數(shù)設(shè)計挖掘機(jī)動臂結(jié)構(gòu)的配置類。需要對初始方案設(shè)計的編碼主要是輸入?yún)?shù)的編碼(實例保存編碼)和輸出的動臂結(jié)構(gòu)類型配置方案編碼,主流編碼方法有:二進(jìn)制編碼、Gray編碼、浮點編碼、實數(shù)編碼等。其中二進(jìn)制碼主要應(yīng)用于模式分類,本文實例推理本質(zhì)是應(yīng)用到神經(jīng)網(wǎng)絡(luò)的分類,因此采用二進(jìn)制碼作為方案的輸出編碼,而對于輸入的實例,采用實數(shù)輸入。
2.2 動臂結(jié)構(gòu)類型配置
動臂結(jié)構(gòu)初始方案設(shè)計主要是實現(xiàn)對動臂結(jié)構(gòu)類型配置自動化配置[12],但是在方案設(shè)計之前必須收集動臂所有的結(jié)構(gòu)類型配置,本文總結(jié)出動臂結(jié)構(gòu)類型配置樹狀圖,如圖3所示。動臂的結(jié)構(gòu)特征整體分為普通型動臂和加長型動臂,其次按其整體的特征分為整體式和組合式,還有與機(jī)身的連接方式、液壓缸布置等。傳統(tǒng)的動臂結(jié)構(gòu)類型配置的設(shè)計需要設(shè)計人員有豐富的經(jīng)驗知識,為實現(xiàn)方案設(shè)計的快速設(shè)計,需要從歷史的實例中挖掘知識引導(dǎo)動臂結(jié)構(gòu)方案的設(shè)計,但是實現(xiàn)實例推理的基礎(chǔ)是合理的編碼方法和完善的實例庫。
從圖3可以看出動臂結(jié)構(gòu)形狀配置種類很多,每個樹狀圖節(jié)點都連接不同的配置類型。為了方便運(yùn)用概率網(wǎng)絡(luò)和最近鄰距離法進(jìn)行推理,動臂的方案配置類型需要進(jìn)行編碼。具體的編碼規(guī)則如表1所示。以建立的實例推理算法進(jìn)行實例推理。比如輸出的動臂結(jié)構(gòu)配置方案編碼為001001000001001 001001:整體式彎動臂單液壓缸、油缸下置、動臂懸掛、動臂包絡(luò)斗桿、有加強(qiáng)板。
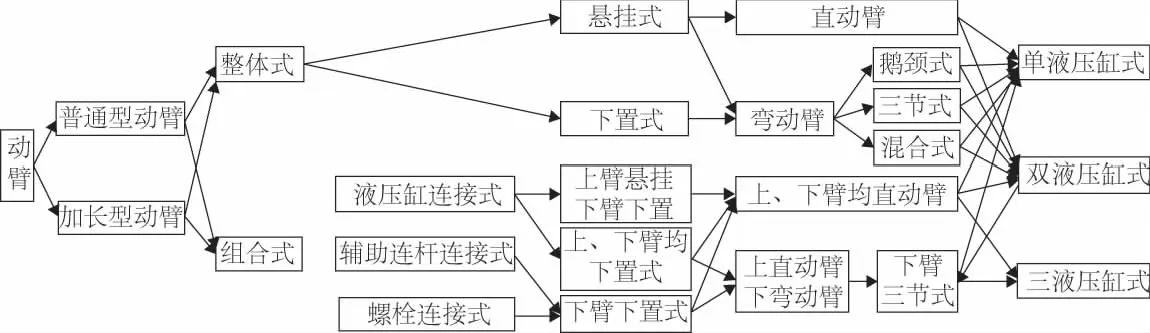
圖3 動臂結(jié)構(gòu)類型配置樹狀圖
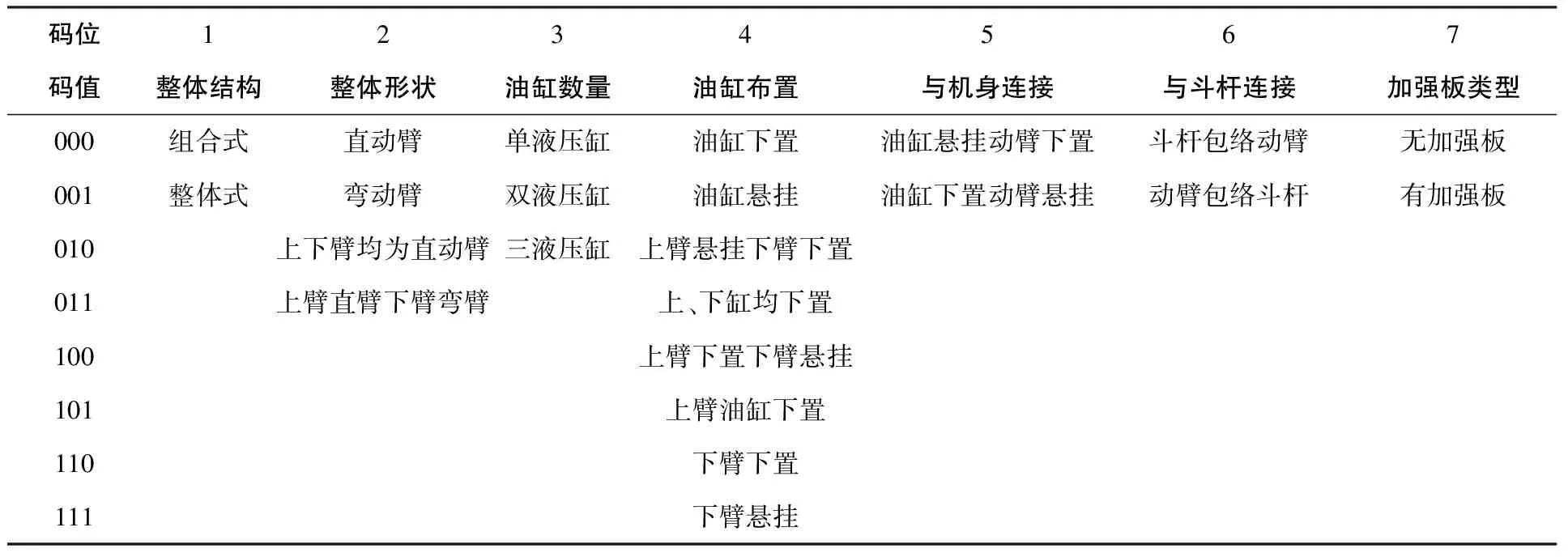
表1 動臂結(jié)構(gòu)配置方案編碼規(guī)則
實例推理中編碼規(guī)則決定檢索的精度和推理速度[13]。以斗容、挖掘機(jī)范圍(最大挖掘深度、最大挖掘半徑、最大卸載高度、最大挖掘高度)、最大挖掘力、使用環(huán)境、工作質(zhì)量8個參數(shù)作為初始參數(shù),以動臂的整體結(jié)構(gòu)、形狀特征、油缸布置、加強(qiáng)板類型等配置類型作為輸出。對于輸入的初始參數(shù)的量綱不同,在進(jìn)行編碼之前必須標(biāo)準(zhǔn)化處理,從而消除量綱的影響。本文收集國內(nèi)外挖掘機(jī)動臂實例50個,其中部分PNN概率神經(jīng)網(wǎng)絡(luò)的訓(xùn)練實例如表2所示。表2中:A代表整體式鵝頸式單液壓缸類型;B代表整體式鵝頸式雙液壓缸類型;C代表組合式雙液壓缸類型。R為斗容;w1為最大挖掘深度;w2為最大挖掘半徑;w3為最大挖掘高度;w4為最大卸載高度;m為工作質(zhì)量;i為使用環(huán)境;F為挖掘力。

表2 概率神經(jīng)網(wǎng)絡(luò)訓(xùn)練部分實例
3 實例推理模型的建立
3.1 PNN概率神經(jīng)網(wǎng)絡(luò)
神經(jīng)網(wǎng)絡(luò)由于具有非常強(qiáng)的非線性映射能力被廣泛應(yīng)用于CBR、預(yù)測和模式識別等領(lǐng)域[14]。本文采用貝葉斯決策規(guī)則對實例進(jìn)行分類,貝葉斯規(guī)則在多維輸入空間分離決策有廣泛的應(yīng)用,其是PNN概率神經(jīng)網(wǎng)絡(luò)的核心。理論上早已證明 , 具有無限隱層節(jié)點,且節(jié)點傳輸函數(shù)絕對可積的3層前饋網(wǎng)絡(luò), 可以實現(xiàn)任何非線性映射[15]。本文采用的概率神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),包括輸入層、模式層、求和層和決策層。具體結(jié)構(gòu)如圖4所示。
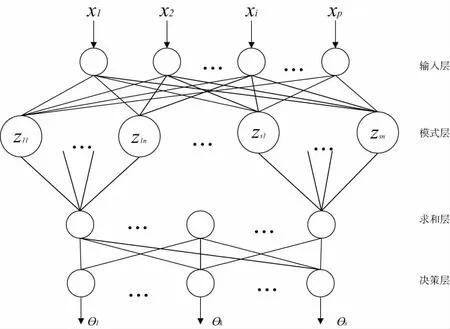
圖4 3層概率神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)
PNN神經(jīng)網(wǎng)絡(luò)的一般構(gòu)成為:設(shè)X為測試向量,x=(x1,x2,x3,…,xn), 其中各個元素X表示特征屬性值用來對實例進(jìn)行分類。Wi為類型Ci中的訓(xùn)練樣本數(shù)。PNN神經(jīng)網(wǎng)絡(luò)訓(xùn)練的一般過程為: 首先將測試向量X通過輸入層傳輸?shù)礁鱾€模式單元。測試向量與訓(xùn)練向量之間的匹配關(guān)系由模式層通過算法計算獲得,其計算方式如式(1)所示。
(1)
3.2 最近鄰距離法
最近鄰算法是從實例庫中推理出和目標(biāo)實例“距離”最近的實例,運(yùn)用最近鄰方法首先要定義“距離函數(shù)”,可以根據(jù)不同的問題和需求選擇不同的距離函數(shù)。現(xiàn)在距離函數(shù)主要有:絕對值距離法、曼哈頓度量法、歐式度量法和無限模法[16]。當(dāng)目標(biāo)實例屬性與實例庫中相應(yīng)的屬性相同時,則相似度取1,否則取0。對于確定的數(shù)值的相似度,本文采用的函數(shù)形式如式(2)所示。
(2)
1) 基于專家經(jīng)驗賦權(quán)。請設(shè)計專家對選擇的設(shè)計專家對屬性參數(shù)進(jìn)行評分,表示為vi。依據(jù)評分來確定專家權(quán)重W(1)。其計算過程采用公式為:
(3)
2) 基于相似度偏差的客觀賦權(quán)。設(shè)cq為目標(biāo)實例,C={c1,c2,c3,…cn}是實例庫中的實例集合。sij表示為cq與實例ci的相似度,由此可以得到目標(biāo)實例cq與C的相似矩陣:
(4)
根據(jù)客觀數(shù)據(jù)來決定客觀權(quán)重,相似度矩陣之間的差異可判斷屬性對檢索結(jié)果的影響力。針對第j個屬性,若實例cq和實例C中所有實例的相似度sij差異很小,則該屬性對實例檢索的影響力比較小,應(yīng)該賦予較小的權(quán)重;反之,則應(yīng)該賦予較大的權(quán)重。根據(jù)以上分析,加權(quán)向量W的選擇應(yīng)使所有屬性對所有實例的總離差最大。為此,構(gòu)造目標(biāo)函數(shù)為:
(5)
運(yùn)用拉格朗日乘法來解此條件極值問題,得到:
(6)

4 實例驗證
依托已搭建的挖掘機(jī)工作裝置實驗平臺,將收集到的歷史實例保存到實例庫中,并依據(jù)動臂的初始參數(shù):斗容、挖掘機(jī)范圍(最大挖掘深度、最大挖掘半徑、最大卸載高度、最大挖掘高度)、最大挖掘力、使用環(huán)境、工作質(zhì)量、機(jī)構(gòu)參數(shù)(lCD、lCB、lCF、lDF、lBF)13個參數(shù)作為輸入?yún)?shù)。以動臂配置方案的21位編碼作為輸出,按2.2節(jié)的編碼規(guī)則對非數(shù)值的特征進(jìn)行實數(shù)編碼。
4.1 PNN訓(xùn)練與分類
設(shè)計要求一般根據(jù)動臂的整體結(jié)構(gòu)類型分為整體式和組合式等特點將其分為3個大類:整體鵝頸式單液壓缸、整體鵝頸式雙液壓缸和組合式雙液壓缸。由此建立概率神經(jīng)網(wǎng)絡(luò)對3種類型的實例屬性特點進(jìn)行記憶。
本文以設(shè)計斗容1.6m3、工作質(zhì)量30 000kg、最大挖掘力200kN、最大挖掘半徑為10 000mm、最大卸載高度8 000mm最大挖掘高度10 000mm、最大挖掘深度6 000mm、使用環(huán)境為石方挖掘為初始方案設(shè)計參數(shù),將設(shè)計參數(shù)輸入到訓(xùn)練好的概率網(wǎng)絡(luò)中進(jìn)行第1次實例推理,得到的結(jié)果如表3所示。

表3 新設(shè)計要求及分類結(jié)果
4.2 最近鄰相似度檢索
根據(jù)概率網(wǎng)絡(luò)案例推理的結(jié)果可以看出,新的設(shè)計要求屬于B類型,由此要在B類型內(nèi)進(jìn)行相似實例的檢索。表4為B型實例庫和設(shè)計要求。根據(jù)相似度矩陣的理論,可以得到相似矩陣。
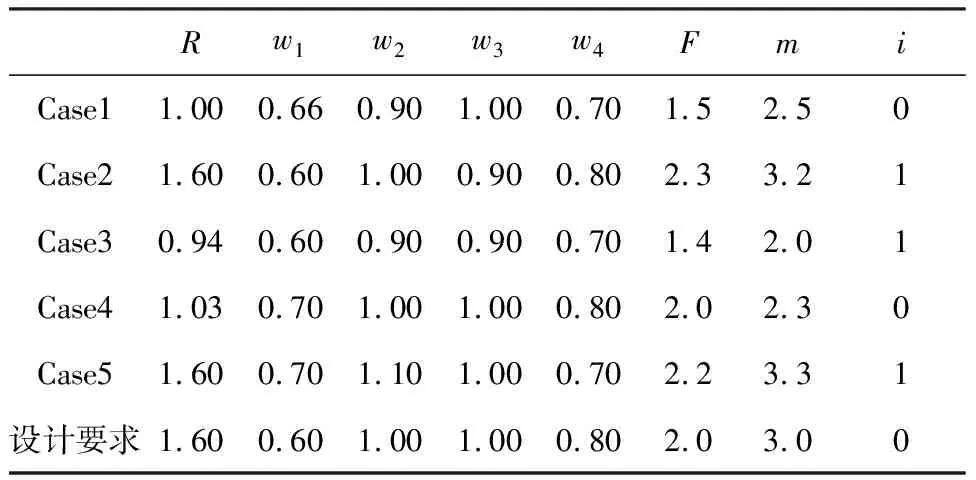
表4 目標(biāo)實例與概率網(wǎng)絡(luò)推理出的實例“距離”

根據(jù)式(3)計算主觀權(quán)重W(1)={0.36,0.04,0.04,0.04,0.04,0.16,0.16,0.16},根據(jù)式(6)和相似矩陣S計算客觀權(quán)重W(2)={ 0.080 4 ,0.047 1,0.037 7,0.037 7,0.047 1,0.163 3,0.209 8, 0.376 9};取δ=0.5,則綜合權(quán)重W={ 0.220 2,0.043 6,0.038 8,0.038 8,0.043 6,0.161 7,0.184 9,0.268 4}。根據(jù)各個屬性的加權(quán)和求和目標(biāo)實例與實例庫中的實例的相似度sim(cq,ci)={0.516 4,0.916 2,0.718 4,0.577 0, 0.654 4}。由此選取B類型中的case2作為最相似實例,此得到動臂結(jié)構(gòu)配置方案為Case2的動臂結(jié)構(gòu)類型001001001001001001001,解碼為整體式、彎動臂、雙液壓缸、油缸下置、動臂包絡(luò)斗桿、無加強(qiáng)板類型。
5 結(jié)語
通過建立基于實例推理的方法實現(xiàn)對動臂結(jié)構(gòu)類型配置方案的設(shè)計,得到以下結(jié)論:
1) 通過對動臂結(jié)構(gòu)類型的功能以及特征的分解,依據(jù)相關(guān)性分析選擇與動臂結(jié)構(gòu)相關(guān)性比較大的設(shè)計參數(shù)作為初始參數(shù),通過相關(guān)性分析提出冗余的實例,為高效的實例推理奠定了基礎(chǔ)。依據(jù)編碼規(guī)則建立特征表示模型,包括斗容、挖掘范圍、最大挖掘力等13個參數(shù)特征,以及輸出配置方案的表示,包括整體式、油缸分布等7個配置元素,方便實例推理。
2) 通過概率神經(jīng)網(wǎng)絡(luò)1次檢索和最近鄰距離法2次檢索的混合推理方法,解決了實例推理權(quán)重的確定受設(shè)計人員主觀因素的影響的問題。
最后通過3個實例驗證,證明方法的可行性與有效性。CBR技術(shù)為動臂的結(jié)構(gòu)方案設(shè)計提供了建設(shè)性的參考,在這個智能設(shè)計平臺運(yùn)行過程中,設(shè)計人員與系統(tǒng)進(jìn)行人機(jī)交互的對話,解決設(shè)計人員經(jīng)驗不足的問題并且提高設(shè)計效率。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50