基于狀態估計的虛擬應答器捕獲方法研究
2018-10-31 02:16:56蔡伯根陸德彪
鐵道學報 2018年10期
關鍵詞:信息
劉 江,蔡伯根,王 劍,陸德彪
(1.北京交通大學 電子信息工程學院,北京 100044;2.北京市軌道交通電磁兼容與衛星導航工程技術研究中心,北京 100044)
隨著世界范圍內衛星導航系統的迅速發展,將衛星定位技術用于鐵路運輸系統已逐漸成為一個重要的發展方向。近年來,美國、歐洲對GPS、GALILEO系統在列車運行控制及鐵路信號領域的應用開展了大量工作[1-2]。 以增強型列車控制系統ITCS(Incremental Train Control System)為代表的低成本列車控制系統已在美國、澳大利亞以及我國青藏鐵路等得到實際應用。歐洲針對低成本運營需求提出ETCS-LC(European Train Control System-Low Cost)計劃[3],旨在采用衛星定位面向高速鐵路以外的主要線路及低密度線路實現低成本列車控制,對ETCS框架形成延伸。此外,美國PTC[4]、法國Atlas400[5]、俄羅斯Klub-U[6]等系統的開發以及位于Sardinia的基于衛星定位的列控試驗段的示范實施[7],極大促進了衛星導航在列車控制等安全領域的實質性應用,形成了重要的產業推動力。
衛星定位設備能與軌道信息相結合實現一維列車定位,然而,將其用于列車控制系統面臨的首要難點在于如何滿足列控系統對安全的苛刻需求。由于衛星定位在空間段、信號傳輸、用戶端等可能面臨諸多導致性能惡化甚至功能失效的因素,單一依賴衛星導航系統實現列車測速定位無法始終在精確性、連續性、可用性等方面滿足列控系統需求,進而保障列控系統的安全性。為合理引入衛星定位技術,同時盡可能降低衛星定位可能面臨的安全風險以及對現有系統體系的異化程度,歐洲提出虛擬應答器VB(Virtual Balise)的概念,旨在形成一種基于衛星定位且與既有ETCS規范相兼容的列控系統方案。作為一個車載列控系統的模塊,虛擬應答器利用衛星定位、輔助傳感器及軌道地圖確定列車運行狀態,替代物理應答器向車載設備發送報文信息,從而以高自主性實現列控系統成本的有效降低。
近年來,國外開展了一系列針對虛擬應答器的研究開發工作,在系統方案及性能需求[8]、定位單元初始化邏輯[9]、定位信息融合[10]、用于ETCS的安全性評估[11]、系統試驗驗證[12]等方面取得了一些進展。國內對虛擬應答器的研究仍處于起步階段,在我國下一代列控系統NGTC(Next Generation Train Control)方案中開始引入虛擬應答器技術進而將衛星定位引入列車控制過程,然而,目前我國在虛擬應答器的核心機理,特別是虛擬應答器信息處理、捕獲識別、安全判別等方面,仍未形成成熟的技術體系。捕獲作為實現應答器功能的關鍵步驟,常規的基于捕獲半徑的幾何判別方案[13-14]采用確定的捕獲空間范圍與計算所得列車位置進行空間從屬性關聯,識別列車當前是否通過應答器所在位置,并決定是否將該應答器標記為已捕獲狀態,此類方法實現簡便,但存在固定捕獲半徑在不同的列車速度、運行條件下的重復捕獲、漏捕獲等問題。對基本的捕獲方法提出的一些改進方案,如根據列車運行速度、衛星定位接收機輸出頻率動態調整捕獲半徑[15],考慮定位計算誤差的捕獲識別[16],結合統計測試的捕獲及列車通過狀態判別方法[17],在一定程度上考慮了捕獲率的保障以及定位誤差對捕獲性能的不利影響。然而,現有的捕獲方案未能全面考慮對捕獲性能的優化,并未將捕獲計算與定位誤差校正、應答器報文觸發等功能進行緊密結合,從而應對復雜現場條件的應用需求。為此,本文對常規的虛擬應答器捕獲思路進行改進,將捕獲判別與列車定位計算過程進行結合,同時確保捕獲的時間靈敏度、識別正確率,并防止漏捕獲、重捕獲的發生,對有效應用虛擬應答器模式實施列車運行控制具有重要意義。
本文對常規基于捕獲半徑判別的虛擬應答器捕獲方法進行了改進,建立列車與目標虛擬應答器相對運動態勢的狀態空間模型,引入狀態空間估計思想,提出一種基于狀態估計的虛擬應答器捕獲判決新方法,并利用現場數據對該方法進行驗證與分析。
1 虛擬應答器概述
虛擬應答器的定義可以用真實應答器為基礎通過比較而確定。歐洲結合ETCS現有體系規范,對虛擬應答器進行定義如下[18]:虛擬應答器是ETCS車載設備的一個附加裝置,它利用衛星導航接收機等設備提供的列車定位信息與預定軌道參考點(應答器)進行比較,在確認列車經過應答器的時刻模擬真實應答器的工作過程并發送報文信息。
為了確保虛擬應答器替代真實軌旁設備實現相應功能,虛擬應答器需完成從位置信息獲取到實時發送報文的全過程步驟。完整的虛擬應答器系統結構如圖1所示,可以看出,與真實應答器相比,虛擬應答器完全由車載裝置構成,無需使用物理應答器等地面設備,避免了車-地無線報文傳輸過程存在的不確定性。具體來看,其結構主要包括3個模塊:
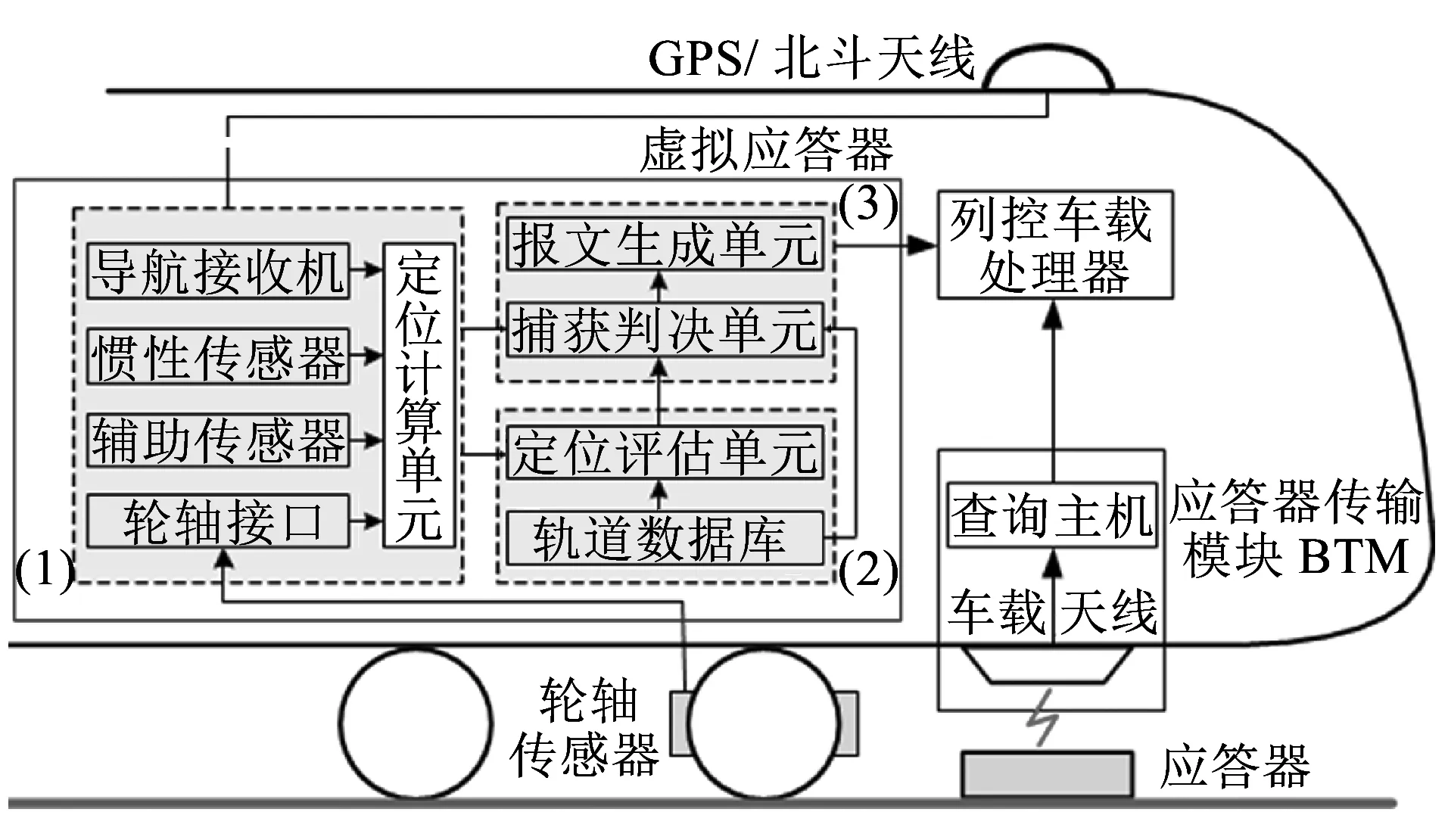
圖1 虛擬應答器結構與工作原理示意
(1)定位計算模塊:包含定位傳感器、定位計算單元,為確認應答器經過狀態提供位置信息。可采用輪軸傳感器以及慣性傳感器等輔助方式與衛星定位接收機共同采集原始測量數據,由定位計算單元進行數據融合計算以及列車位置與狀態判別。
(2)診斷評估模塊:包含軌道數據庫、定位評估單元,為所獲得定位計算結果提供質量及有效性的評估和診斷。軌道數據庫中存儲線路基礎數據及應答器分布信息,定位評估單元以軌道數據為參考,評價當前定位質量并決定其能否用于實現虛擬應答器功能。
(3)報文傳輸模塊:包含捕獲判決單元、報文生成單元,為列控車載設備提供應答器報文信息。在定位信息有效的情況下,捕獲判決單元利用列車位置與軌道數據庫中存儲的目標應答器位置進行實時比較,在所判定的應答器捕獲時刻觸發報文生成單元,向車載列控設備發送與真實應答器一致的報文信息。
從功能原理上來看,虛擬應答器的核心特點在于報文來源的取代,并采用軟件化處理邏輯代替真實應答器與應答器傳輸模塊BTM(Balise Transmission Module)天線的無線傳輸,實現報文信息傳遞。雖然虛擬應答器在理論上能夠獲得顯著的成本效益,但其內部采用的信息處理邏輯是其功能實現及性能水平的決定性因素,也是解決實際應用問題的關鍵所在。
2 虛擬應答器捕獲原理
從虛擬應答器的工作過程可以看出,除了所采用的定位融合計算邏輯、診斷評估方法之外,最終利用定位信息觸發報文傳輸的關鍵因素在于如何準確確定列車駛過預設虛擬應答器位置的瞬時時刻所完成的這一判決邏輯,稱為虛擬應答器捕獲(VB Capture),其功能主要由捕獲判決單元完成。虛擬應答器捕獲的實施條件包括3個方面:
(1)定位計算模塊正常計算出列車位置,包括二維平面坐標系下的坐標位置及相應的一維里程;
(2)診斷評估模塊判斷當前獲取的定位信息有效,不存在故障或顯著的完好性風險;
(3)捕獲判決單元記錄已捕獲應答器信息,并據此從軌道數據庫中提取待捕獲的鄰近后續應答器NVB(Next Virtual Balise)信息,包括標識、坐標位置等。
虛擬應答器捕獲的實施結果主要包括兩個方面:
(1)捕獲判決單元更新已捕獲應答器狀態,用于后續時刻運行過程更新捕獲目標NVB信息;
(2)捕獲判決單元向報文生成單元發送觸發信息并提供所捕獲的應答器信息,報文生成單元據此完成報文查詢、組包以及發送等功能。
虛擬應答器捕獲的邏輯機理實質上是一個列車空間位置與預定應答器位置的匹配狀態識別問題,圖2給出了常規捕獲過程在二維空間平面的示意。
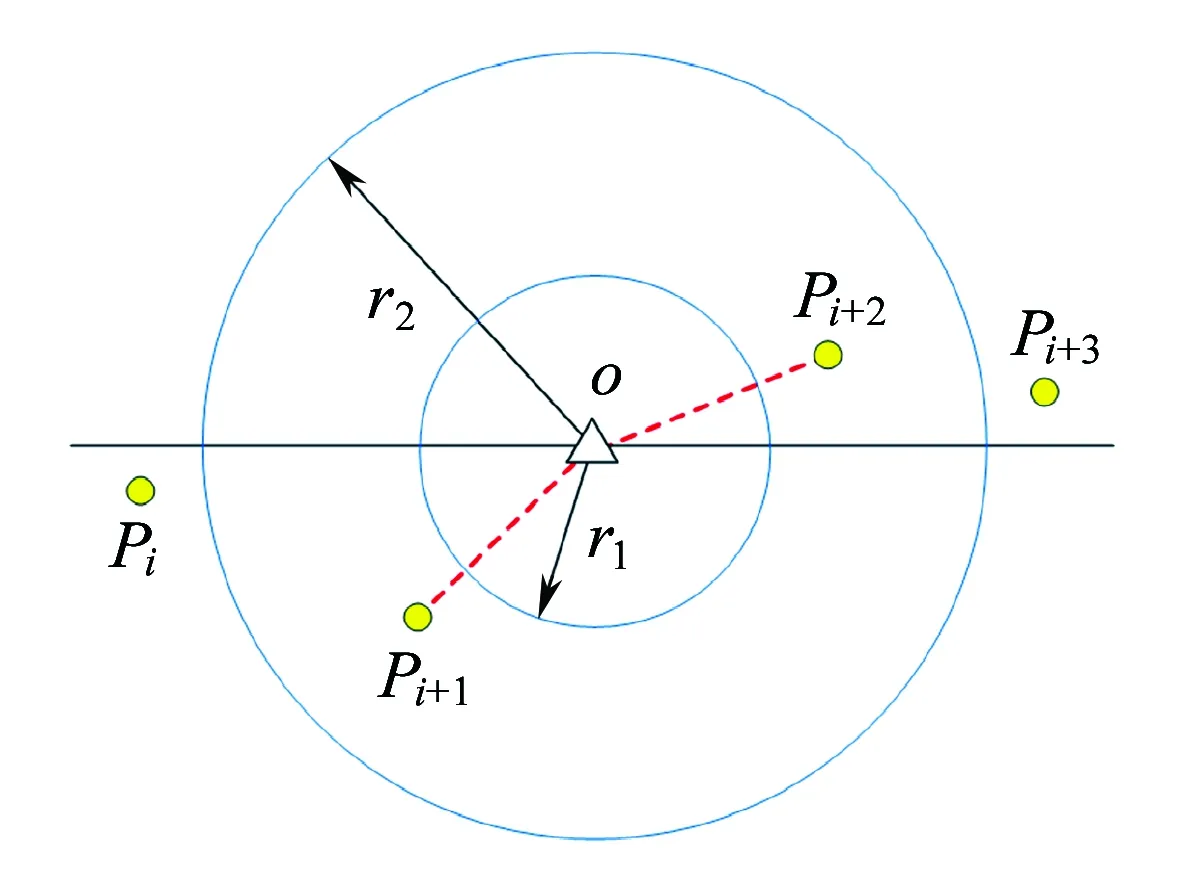
圖2 常規虛擬應答器捕獲原理
常規虛擬應答器捕獲方法采用一種基于捕獲半徑CI(Capture Interval)的判決原理[18]。在捕獲邏輯中預設一個捕獲半徑值,并據此以應答器位置為中心形成一個確定的捕獲區域,通過判斷列車定位模塊給出的二維位置是否落入該區域,確定捕獲狀態。圖2中的點列{Pi,Pi+1,…,Pi+3}表示所得二維列車位置,以應答器位置O為圓心、rj(j=1,2)為半徑的圓形捕獲區域可用于在落入該區域時判定該虛擬應答器捕獲。
基于捕獲半徑的判決機制邏輯相對簡單,易于軟件實現,但采用確定的捕獲半徑可能導致漏捕獲、重捕獲等問題。如圖2所示,若采用捕獲半徑r1,在所示定位輸出條件下無定位位置落入捕獲區域,漏捕獲會導致無法觸發報文傳輸;若采用半徑r2,則同時有多個定位位置落入捕獲區域,對捕獲狀態的確認帶來了模糊性。此外,從捕獲空間精度(由捕獲殘差衡量,如OPi+1的歐氏距離)來看,捕獲識別時刻與列車實際經過應答器位置的時刻仍存在一定偏差,捕獲半徑越小,相對而言捕獲精度越高,但漏捕獲風險增大;半徑越大,捕獲精度下降的概率增高,確認捕獲結果的不確定性增大。為盡可能避免漏捕獲、重捕獲,需對捕獲半徑進行修正并增加額外的防護邏輯[14]。然而,在確定半徑條件下的捕獲精度與重捕、漏捕風險仍難以有效調和,并且這種單一的判決邏輯未深入利用定位信息以及診斷評估信息的輔助能力。基于此,本文引入狀態估計方法用于實施捕獲,從信息利用深度的角度消除對捕獲半徑這一條件的依賴,提升捕獲性能。
3 基于狀態估計的捕獲算法
(1)uj=0,表示該虛擬應答器未被捕獲;
(2)uj=1,表示該虛擬應答器已被捕獲;
(3)不考慮漏捕獲的情況下,狀態序列滿足一定的順序關系,即若最新被捕獲的應答器編號為j,則uj=1,且u1=…=uj-1=1,uj+1=…=uN=0;
(4)任一時刻的待捕獲目標為NVB,即尚未捕獲的最鄰近后續應答器,根據(3)所示取值,NVB為第j+1個應答器。
以NVB的位置信息為依據,包括其經度λj+1、緯度φj+1、軌道里程sj+1,虛擬應答器的捕獲過程實際可描述為列車向NVB運行過程中的時空對準問題。假定列車在k-1時刻未判定NVB捕獲,則在當前時刻從定位傳感器獲取測量信息后,可將常規模式下相對獨立的定位計算與捕獲判決進行結合,引入狀態估計思想,在位置預測與估計過程中確定列車位置與NVB對準的時間度量。僅考慮列車在二維平面坐標系中的動態,以列車東向位置xk、北向位置yk與NVB位置的差值及其一階、二階導數構成待估狀態向量。
(1)
ek=xk-xj+1
(2)
nk=yk-yj+1
(3)
式中:ek、nk分別為二維位置差值;(xj+1,yj+1)為NVB經緯度(λj+1,φj+1)轉換所得的二維位置。
以衛星定位接收機輸出的經緯度坐標轉換為二維位置(xk,yk)以及輪軸傳感器輸出的速度vk構建量測向量,同時輔以由k-1時刻地圖匹配所得航向角θk作為虛擬測量信息,量測向量可表示為
yk=[xkykvkθk]T
(4)
為了實現列車向NVB運行狀態的估計,結合上述狀態向量、量測向量定義構建系統及量測模型為
xk=Φk|k-1xk-1+wk
(5)
yk=h(xk,k)+εk
(6)
式中:Φk|k-1為描述狀態量從k-1時刻至k時刻的轉移矩陣;h(*)為描述量測向量與狀態向量關系的量測函數;wk、εk分別為系統誤差及量測誤差向量,通常假定為高斯噪聲且方差為Qk、Rk。
根據狀態量的定義可知,狀態量從k-1時刻至k時刻的轉移服從一定的列車運行動力學規律。采用常加速模型可知,若
(7)
(8)
則可知位置差值及其一階導數的關系為
(9)
(10)
(11)
(12)
式中:T為濾波計算周期;wk=[wk,1…wk,6]T。基于此,可得式(5)所示系統模型的具體形式。
根據量測信息的物理意義可知其分別與狀態量之間的關系,(xk,yk)與(ek,nk)的線性關系可由式(2)、式(3)得出,速度vk、航向角θk量測模型可描述為
(13)
(14)
由此可確定式(6)所示量測模型的具體形式。每當獲得衛星導航接收機、輪軸傳感器觀測信息,依據系統與量測模型,可進行濾波計算,對列車朝向NVB運行的狀態進行估計。為了有效確定列車實際經過NVB的確切時刻并對NVB屬性進行適時更新,將常規濾波器設計中的時間更新、量測更新過程進行調整,在每個計算周期將量測更新結果進行基于時間的前向預測,從而對NVB進行對準時刻估計,完成NVB信息更新,并進行濾波器校正。
具體來看,本文所述的虛擬應答器捕獲邏輯伴隨著列車運行狀態估計過程,可分為4個步驟:
步驟1初始化

步驟2量測更新計算
(15)
i=1,2,…,m
(16)
Zi,k|k-1=h(Xi,k|k-1,k)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
式中:{ξi}為一組m個sigma點集,且m=2n,n為狀態量維數。

步驟3匹配預測計算
(24)
(25)
(26)
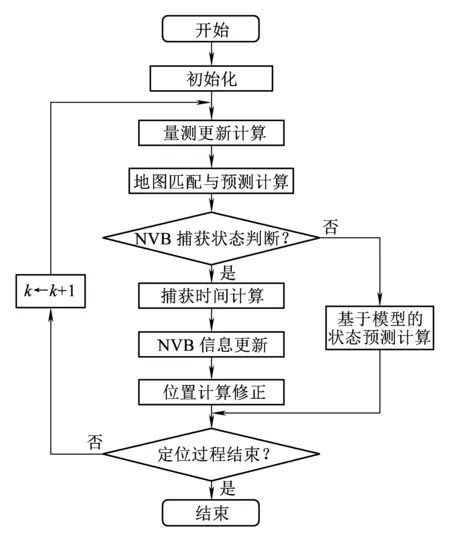
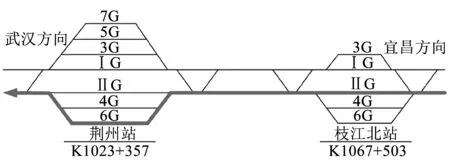
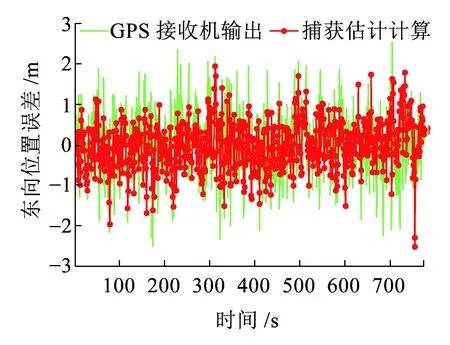
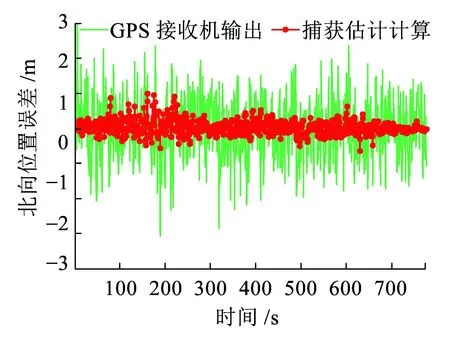
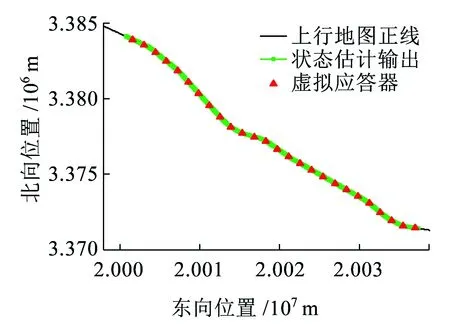
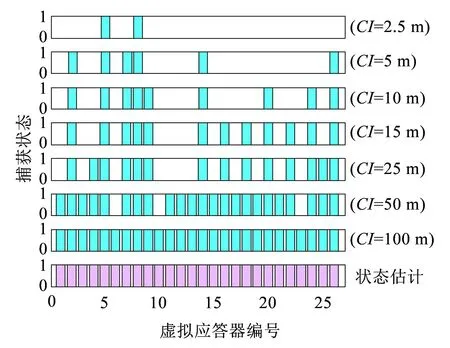
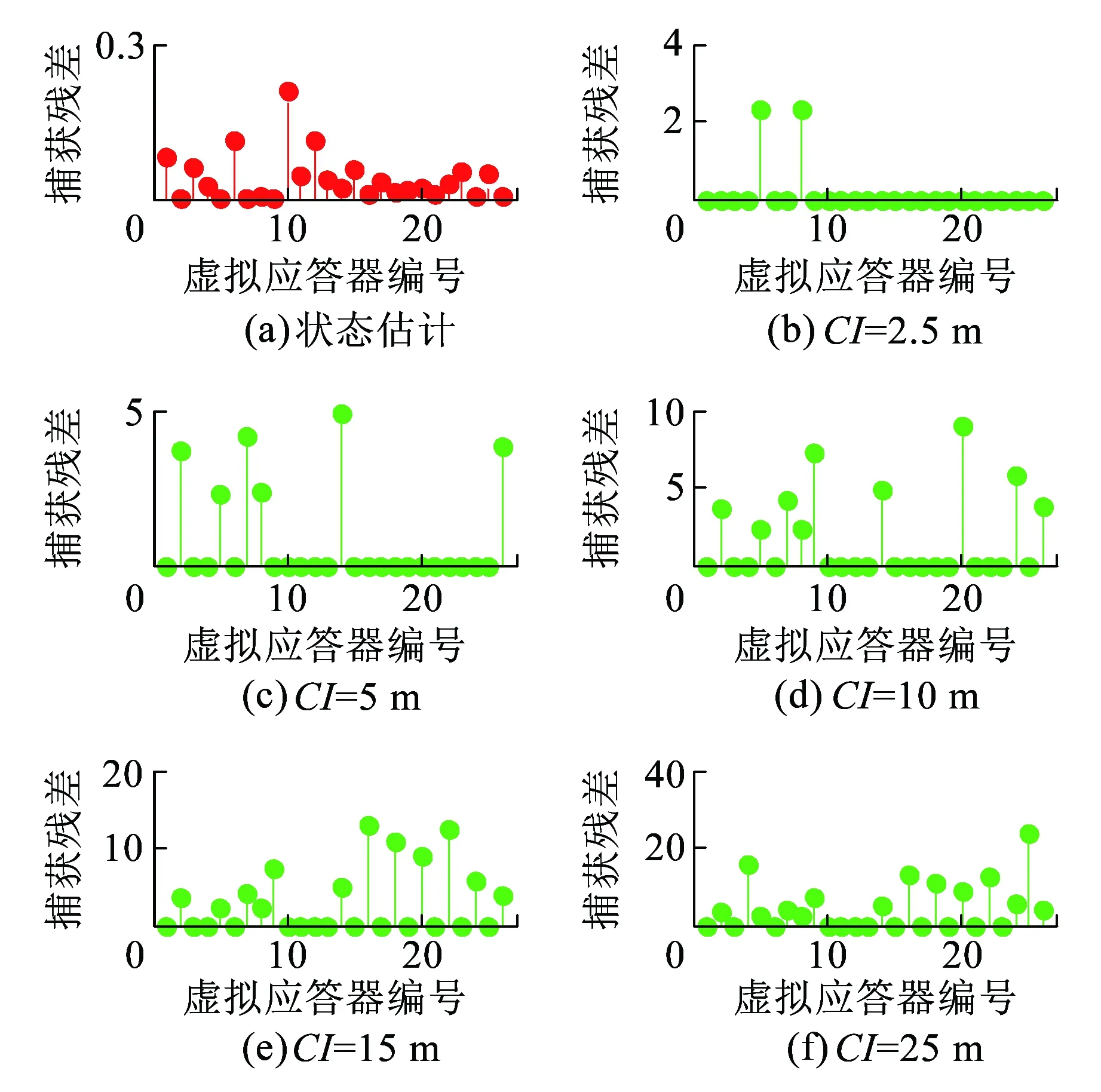
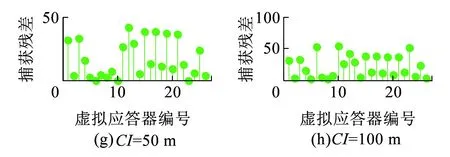
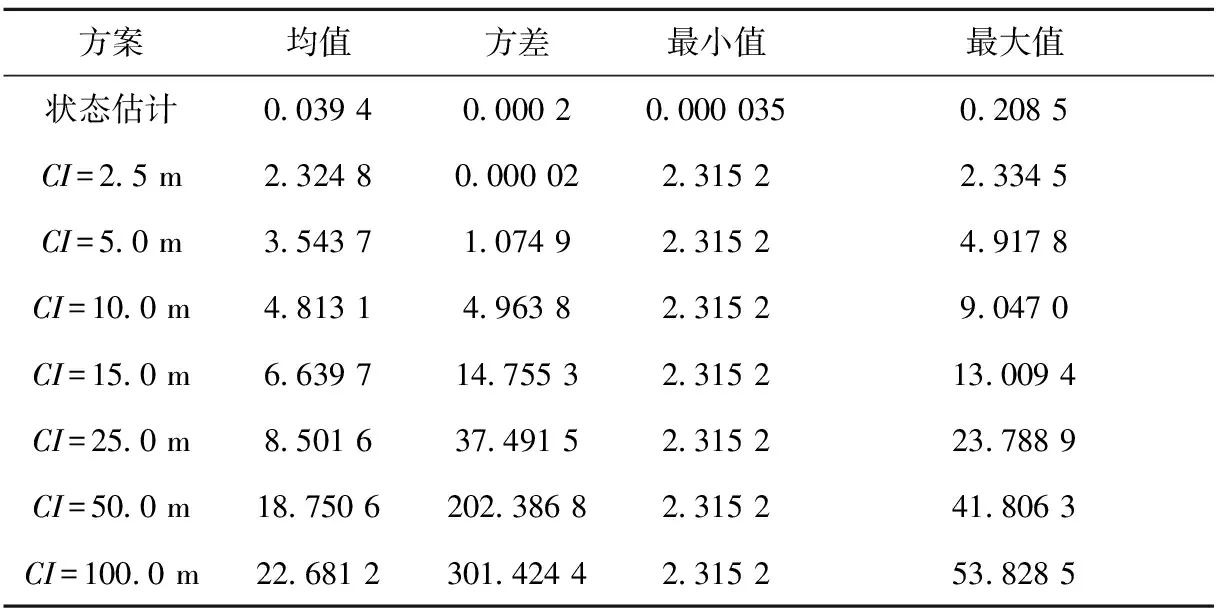
式中:(xF,yF,sF)、(xE,yE,sE)分別為所選取地圖片段兩個端點的坐標及里程,如圖3所示地圖關鍵點PM1、PM2,一般取sF (27) lC=yE-lAxE (28) 圖3 基于狀態估計的虛擬應答器捕獲原理 步驟4捕獲判別更新 (29) 根據式(29)進行虛擬應答器捕獲判別的結果,可分別進行如下兩類操作: (1)若NVB判定為被捕獲 先后完成捕獲時間確定、NVB信息更新、位置計算校正等操作,對下一周期捕獲判別狀態估計的基準值進行修正,并修改目標NVB參照信息。 更新NVB信息:將虛擬應答器序列里第j+1個VB標記為已捕獲,即uj+1=1。若列車運行方向與應答器編號增方向同向,則下一周期取j=j+1,即以第j+2個應答器為目標NVB,且uj+2=…=uN=0。若運行方向與應答器編號增方向反向,則j=j-1,即設定第j個為NVB。相應地,更新后的NVB位置信息用于構建狀態量并進行后續捕獲計算。 (2)若NVB判定為未捕獲 (30) (31) 式中:Pk+1|k為一步預測方差矩陣。 上述基于狀態估計的虛擬應答器捕獲方法涉及4個步驟的描述,可進一步通過圖4所示的處理流程對虛擬應答器捕獲過程進行總結。 圖4 常規虛擬應答器捕獲原理示意 與常規基于捕獲半徑的虛擬應答器捕獲方法進行比較,本文所提出的狀態估計捕獲判別方法具有以下幾方面顯著區別及典型特點: (1)由于引入了狀態估計過程,捕獲邏輯能夠采用對后續時刻的狀態預測來預判列車與虛擬應答器的接近狀態,從而有效避免漏捕獲、重捕獲,提升了虛擬應答器的捕獲率及捕獲可靠性水平。 (2)在虛擬應答器的捕獲判定過程中引入軌道電子地圖先驗信息,增加了對列車定位傳感器觀測信息、軌道地圖信息的綜合利用深度,有利于提升定位性能與捕獲精度,降低捕獲殘差水平。 (3)利用狀態估計結果以及列車運行動態模型進行預測,能夠給出更高分辨率水平的捕獲時間估計,用于確定虛擬應答器報文發送功能的具體觸發時機。 在采用衛星定位實現虛擬應答器過程中,不可避免會遇到導航衛星信號受到遮擋、干擾,導致衛星定位功能失效的情況,為了確保虛擬應答器捕獲功能的連續性,可在衛星定位失效情況下采用降級策略,依據輔助傳感器(如輪軸速度傳感器等)推算位置以及固定捕獲半徑繼續完成捕獲判斷,直至衛星定位恢復正常,從而盡可能充分發揮本文所述捕獲方法的作用。 本文采用2012年6月于漢宜鐵路進行現場試驗采集的定位數據對本文所述虛擬應答器捕獲方法進行測試和驗證。所選取測試區段為“枝江北—荊州”上行區間約44 km的線路(測試動車組運行計劃及列車進路如圖5所示),以車載試驗設備所含Ashtech MB100型GPS接收機在差分定位模式下的日志數據作為基礎,通過Spirent GSS8000型衛星導航模擬器回放與地圖匹配獲得列車在軌道坐標系的位置及運行速度,構成定位參照基準,并在基準量中疊加高斯白噪聲(東向位置、北向位置、速度標準差分別為0.87 m、0.81 m、0.11 m/s)模擬GPS接收機、脈沖速度傳感器的測量結果。 圖5 測試區段內列車運行計劃及進路 采用漢宜鐵路衛星定位試驗過程中采集制作的軌道電子地圖數據庫用于列車定位計算及虛擬應答器功能的實現。在測試區段內按照1.5 km固定間隔共設置26個虛擬應答器,以軌道地圖數據庫上行方向正線關鍵點信息為參照,提取軌道信息,計算并生成虛擬應答器數據庫,包含各虛擬應答器的編號、二維平面坐標位置、里程、軌道方向等字段信息。 利用上述仿真場景及數據,按照本文所述方法進行虛擬應答器捕獲判定計算,本章從3個方面對虛擬應答器捕獲方法所得性能進行驗證與分析。 在本文所述捕獲方案下,列車定位計算與虛擬應答器捕獲過程已集成為一體,因此,首先對采用狀態估計的捕獲方法所得列車定位精度與GPS接收機定位結果進行比較,結果如圖6、圖7所示,列車定位軌跡如圖8所示。可以看出,由于在捕獲過程中引入狀態估計以及軌道地圖信息,列車定位誤差與GPS接收機直接測量相比得到了明顯抑制,東向位置誤差方差降為GPS接收機結果的61.13%,對北向位置誤差方差的抑制作用更為顯著,低至6.59%。東向、北向誤差抑制效果的差異主要由列車運行方向決定,測試區段航向基本為正東偏南方向(航向角均值108.35°),導致軌道地圖在垂直軌道方向(近似北向)的誤差抑制作用較沿軌道方向(近似東向)更為明顯。 圖6 東向定位誤差比較 圖7 北向定位誤差比較 圖8 列車運行軌跡及虛擬應答器位置 總體來看,從實現虛擬應答器功能角度而言,本文所述方法一方面利用衛星定位結果實現了虛擬應答器的捕獲判定,另一方面,基于狀態估計及虛擬應答器校正也實現了列車定位計算,與直接采用衛星定位接收機輸出結果相比,取得了更優的定位精度水平,為實施其他列控車載設備功能提供了基礎。 為了驗證本文提出的基于狀態估計的虛擬應答器捕獲方法的捕獲性能,選取基于固定捕獲半徑的捕獲方法[18]進行對比,捕獲半徑CI分別選用7個典型值(2.5,5,10,15,25,50,100 m),如此,與基于狀態估計的捕獲方案共構成8組捕獲計算操作,分別進行虛擬應答器的捕獲判定。圖9給出了8個不同捕獲方案下全部26個虛擬應答器的捕獲狀態判定結果,其中,縱軸的數值定義同捕獲狀態序列,0表示未捕獲,1表示被捕獲。由圖9結果可以看出,不同捕獲半徑方案下的捕獲識別率與CI值呈正比關系,對應上述7個典型值按7.69%、23.08%、34.62%、46.15%、53.85%、88.46%、100%逐步遞增。相應地,圖10給出了不同捕獲方案下的捕獲殘差值,其中,固定CI方案的捕獲殘差是指判定捕獲時列車位置與NVB的歐氏距離,而對于基于狀態估計的捕獲方案,由于采用了狀態預測來確定列車經過NVB的準確時刻,捕獲殘差定義為用于從地圖匹配位置出發計算列車位置預測量過程中的模型誤差分量。為了更清楚展示虛擬應答器捕獲殘差的實際情況,表1給出不同方案下捕獲殘差的統計信息,通過分析可知,基于狀態估計的捕獲方法所得捕獲殘差的均值、方差、最小值、最大值與固定CI方案相比,最多均可取得99%以上的優化效果,捕獲殘差能夠得到顯著改善。 圖9 不同捕獲方案下虛擬應答器捕獲狀態比較 圖10 不同捕獲方案下虛擬應答器捕獲殘差比較 方案均值方差最小值最大值狀態估計0.039 40.000 20.000 0350.208 5CI=2.5 m2.324 80.000 022.315 22.334 5CI=5.0 m3.543 71.074 92.315 24.917 8CI=10.0 m4.813 14.963 82.315 29.047 0CI=15.0 m6.639 714.755 32.315 213.009 4CI=25.0 m8.501 637.491 52.315 223.788 9CI=50.0 m18.750 6202.386 82.315 241.806 3CI=100.0 m22.681 2301.424 42.315 253.828 5 雖然采用較大CI值進行捕獲能夠實現高捕獲識別率,但是在上述結果中,可直觀得到固定CI方案下存在的漏捕獲情況,且同時還存在虛擬應答器被連續若干次判定為捕獲狀態的情況(重捕獲情況),為此,本文在計算過程中對各個應答器在不同方案下的重捕獲次數進行了統計,結果如圖11所示,其中,捕獲方案1表示基于狀態估計的捕獲,方案2~8分別表示CI遞增的7組固定半徑捕獲方案。為對固定CI捕獲方案的捕獲性能進行總結,圖12給出了漏捕獲率、重捕獲率的比較結果,其中,捕獲率定義為漏(重)捕獲VB數與已判定捕獲VB數量的比值。為展示細節,圖12中橫軸對捕獲半徑采用對數坐標顯示。 圖11 不同捕獲方案下虛擬應答器重捕獲結果比較 圖12 不同捕獲方案下捕獲率比較 由以上計算結果可以明顯看出本文所述捕獲方案與常規固定CI方案的顯著差異,總體而言,本文所述方法的捕獲性能更優,具體體現在以下幾個方面: (1)漏捕獲:固定CI捕獲方案下,CI的取值大小與漏捕獲率之間呈反比關系,考慮邊界條件,CI=2.5 m情況下,漏捕獲率為92.31%,而CI=100 m情況下的漏捕獲率為0,這是由CI的捕獲機制這一先決因素所導致,而本文所提出的方法通過引入狀態估計及預測,在正常傳感器觀測條件下確保每一個虛擬應答器均得到準確且唯一的捕獲判定,消除漏捕獲情況。 (2)捕獲殘差:固定CI方案的捕獲殘差與CI取值呈正比趨勢。采用狀態估計捕獲方案所得捕獲殘差量級遠小于固定CI方案,由于位置預測機制的引入,使得實際捕獲判定位置與NVB位置之間的偏差得到有效消除,其殘差僅由預測的不確定性誤差造成,較小的捕獲殘差表明其捕獲空間精度水平的顯著提升。 (3)重捕獲:固定CI方案下普遍存在重捕獲情況,且重捕獲概率隨CI增大呈增高趨勢,在上述CI取值方案下最高可達88.46%。總體而言,固定CI方案下的漏捕獲率與重捕獲率呈相反趨勢,這也顯示出兩者的相悖性導致其無法調和的問題,即使可采用首次捕獲狀態鎖定等方式避免重捕獲判定,但漏捕獲的發生以及捕獲殘差較高的問題依然無法得到解決。相比而言,本文方法采取將定位估計與捕獲判決進行集成的策略,從根本特性上避免了這一困境的發生,確保能同時避免漏捕獲、重捕獲的情況。 (4)捕獲可靠性:從上述幾個因素來看,本文所述方法能夠更為有效地確保虛擬應答器捕獲功能在一定時間及條件下得到有效執行,相比于固定CI捕獲方案,本文方法具有更高的捕獲可靠性水平。 在捕獲精度方面,除了上述分析中較為關注的空間屬性,考慮到虛擬應答器兼有應答器報文傳輸的觸發功能,虛擬應答器捕獲的時間屬性同樣需要給予相應的關注。常規的基于固定CI的捕獲方案僅在獲得GPS接收機輸出時刻判定NVB的捕獲狀態,如此則導致虛擬應答器捕獲的時間分辨率直接取決于車載GPS接收機的輸出頻率,而對于列控系統使用虛擬應答器完成列車控制、超速防護等功能而言,捕獲判定的時間分辨率水平是決定其應用效能的重要因素。GPS接收機的典型輸出率(如常用的1 Hz)無法與相對較小的車載設備計算周期相匹配,特別是在列車高速運行過程中,捕獲的時間分辨率失配將導致較大的處理偏差。本文所述方法由于進一步采用狀態預測結果進行捕獲判定,能夠突破衛星定位接收機數據輸出頻率的限制,實現更高的時間分辨率水平。 圖13給出了固定CI方案(選取典型值CI=100 m)與本文提出方法的捕獲時間比較,其中,圖13(b)、圖13(c)分別給出了t=48 s、t=629 s兩個時刻附近的捕獲結果局部情況(對應的捕獲時間差異分別為0.071 1、0.937 6 s)。為區別顯示兩種方案的捕獲狀態,分別采用縱軸捕獲狀態值1、2表示兩種方案下虛擬應答器在相應時刻被判定為捕獲狀態。圖14給出了兩種捕獲方案下所有虛擬應答器捕獲判定時間的差值,差值分布于0.036 9~0.983 9 s范圍內,平均值達到0.435 3 s,所示結果清楚表明了本文提出的基于狀態估計的捕獲方法在捕獲時間分辨率方面的優勢。在時間精度方面,進一步驗證了該方法相比于固定捕獲半徑方案用于確定虛擬應答器報文觸發時機的能力,從另一層面反映了本文所提方法在捕獲精度、捕獲可靠性方面的優化水平,具備更優的實際應用潛力。 圖13 虛擬應答器捕獲時間比較 圖14 不同捕獲策略下捕獲時間差 本文以基于衛星定位的列控系統應用為背景,提出一種基于狀態估計的虛擬應答器捕獲方法,引入狀態估計及預測過程,利用軌道電子地圖信息輔助,將衛星定位/輪軸速度傳感器組合定位過程與虛擬應答器捕獲過程進行了緊密結合。本文所述方法與常規的基于半徑的捕獲方法相比,所具備的優勢集中在兩個方面:在虛擬應答器捕獲性能方面,本文所述方法能夠有效避免漏捕獲、抑制捕獲殘差、消除重捕獲、提升捕獲可靠性、改善捕獲時間分辨率,取得多方面更為優化的捕獲性能水平;在虛擬應答器應用功能方面,能夠更為有效地用于實施列車精確定位并適時觸發應答器報文用于列車控制過程。本文所得成果將有助于在下一代列控系統的方案設計與系統實現中引入衛星定位,并借助虛擬應答器這一技術途徑實現衛星定位技術與既有列控系統模式的有效兼容。 在后續研究中,將進一步關注不同列車衛星定位場景下列車定位與虛擬應答器集成邏輯的完善,特別是對于環境、設備層面可能發生故障的實時檢測、診斷與隔離,使之能夠在不同列車運行環境、傳感器工作條件下具備更優的適應能力。此外,將逐步引入我國北斗衛星導航系統,實現雙模、多模衛星定位并完成虛擬應答器功能,深入分析并提出與下一代列控系統特征相適應的軌道電子地圖數據庫規范,構建完整的基于衛星定位的虛擬應答器技術方案體系。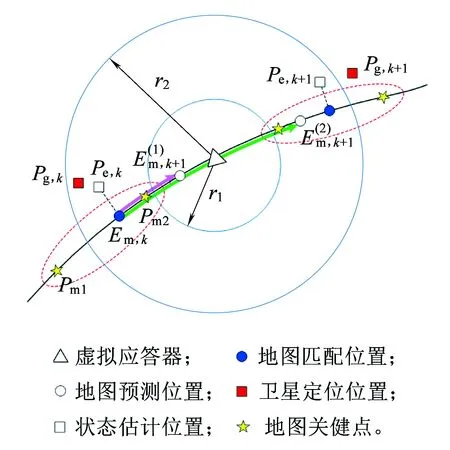



4 驗證與分析
4.1 列車定位精度
4.2 虛擬應答器捕獲特性
4.3 捕獲時間分辨率
5 結束語
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
