新型高速鐵路接觸網腕臂與定位裝置研究
2018-10-31 04:00:18莫繼良韓凌青閆軍芳
鐵道學報 2018年10期
關鍵詞:結構
羅 健,莫繼良,韓凌青,閆軍芳,張 琦
(1.中國鐵路設計集團有限公司,天津 300251;2.西南交通大學 機械工程學院,四川 成都 610031;3.寶雞保德利電氣設備有限責任公司,陜西 寶雞 721000)
高速鐵路的維護、安全及高效運營對于整個鐵路網的發展有著至關重要的意義[1]。接觸網系統作為鐵路供電系統的重要組成部分,其性能以及裝置的狀態直接影響著列車的運行安全[2]。
在接觸網系統中,腕臂和定位裝置的作用至關重要,其主要為承力索和接觸線提供支持和定位作用[3]。接觸網在自然環境中還受到多種環境因素的影響,這些因素以動載荷的形式傳遞到腕臂和定位裝置上,對接觸網的穩定性存在一定威脅[4]。因此,腕臂和定位裝置的結構性能影響列車運行時的受流質量和安全[5-6]。
國內外學者在對現有腕臂結構形式進行分析時普遍采用簡化結構后的公式推導手段以及有限元計算[7-10]。但公式推導過程繁瑣,且結果不夠全面準確。一般用有限元方法對腕臂及其定位裝置進行靜力、動力學分析[11],為優化其零部件結構提供理論基礎指導。接觸網腕臂和定位裝置安裝結構型式、零部件規格型號繁多,給運營維護帶來不便[12]。但鮮有研究人員針對現有腕臂結構進行分析,并提出新型腕臂整體優化設計方案。
本文對現有4種腕臂及定位裝置的結構特點進行分析,并結合有限元計算方法對各個腕臂及定位裝置的靜力學特性進行分析。在設計原則指導下,綜合考慮各方面影響因素后提出簡統化的新型腕臂和定位裝置,具有自主化特征,力爭打造具有創新性、簡約化、安全性、經濟性和便捷性的新型接觸網裝備,為打造簡統化的中國標準接觸網奠定基礎。
1 現有4種腕臂結構特點
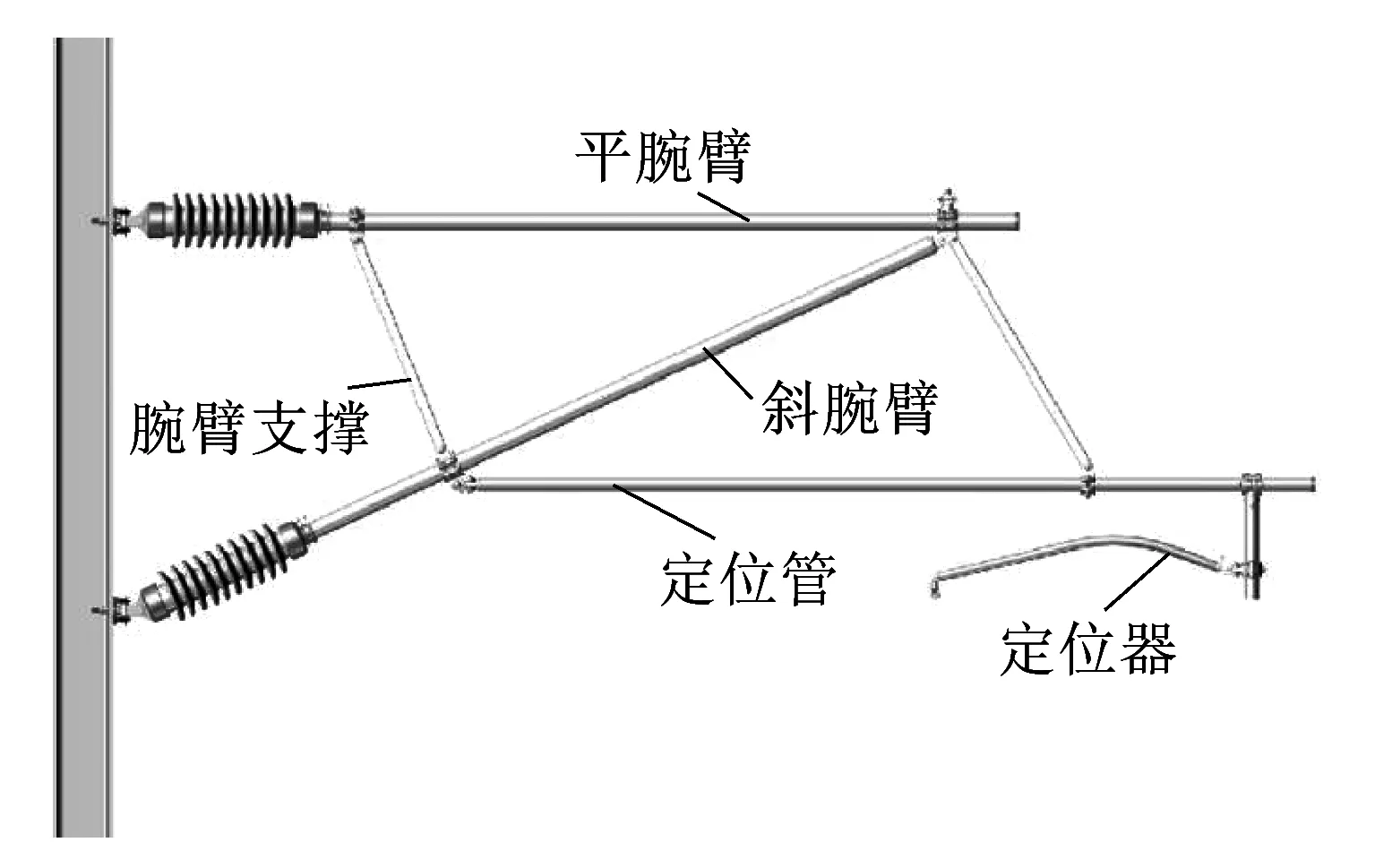
針對現有4種典型腕臂及定位裝置的結構特點進行分析,包括水平鋼腕臂、鋁合金腕臂、拉桿式腕臂和整體式腕臂。
水平鋼腕臂結構呈三角形,腕臂管采用外徑60 mm、壁厚5 mm的碳素結構鋼,連接件為金屬模鍛鋼件。該結構型式比較簡單,整體強度和剛度較好,但鋼材質量較重,且需熱浸鍍鋅防腐,不能隨意切割,不易預配組裝;連接件和緊固件數量較多,易松脫;定位裝置采用帶限位功能的直形鋁合金定位器,與受電弓包絡線之間匹配程度一般,可能造成安全余量小甚至余量不足而打弓的后果;定位器與定位支座為鉤環連接,易磨損。
鋁合金腕臂結構在我國350 km/h高速鐵路中應用廣泛,腕臂使用外徑70 mm、壁厚6 mm的鋁合金管(6082-T6),連接件同樣為鑄造鋁合金材料。該結構的特點與水平鋼腕臂結構特點類似。其材料采用鋁合金,質量較輕,易于切割和安裝,防腐性能較好,但鑄造件工藝質量要求較高。
拉桿式腕臂結構呈銳角三角形,穩定性較好。腕臂支撐采用方鋼型材,加工工序少,生產成本低,且現場安裝簡單可靠。連接件材料選用銅合金并使用鑄造工藝,強度較高且塑性大,但對工藝要求高,需逐件探傷檢驗。銅合金電偶性能良好,因此定位器與定位支座之間不需要電氣連接線連接。定位器采用弧形結構,與定位支底座連接采用銷軸結構,定位器可在定位管立柱上進行位置調整。
整體式腕臂結構在腕臂和定位管的連接處采用了單耳與雙耳連接的簡化結構,雙耳焊接在腕臂管上,再與單耳進行連接。其平腕臂為彎型結構,取代了傳統的腕臂支撐及吊線結構,連接簡單可靠,使腕臂結構在大風區的復雜環境下可靠性較高。零部件連接處為合頁結構,減少了螺紋副連接可能造成的松動現象。定位器外形為弧形,與定位支座連接采用銷軸結構,定位器具備彈性功能。
2 現有腕臂結構靜力學特性分析
2.1 有限元模型
使用Solid Works軟件,根據4種腕臂真實結構建立三維模型,建模時均依據真實情況簡化了連接部位,螺栓變為銷釘,不考慮螺栓預緊力,將定位鉤、環連接處變為鉸接。利用ABAQUS6.14對建立好的模型進行靜力學分析,網格劃分采用C3D8R單元。4種腕臂的有限元模型與邊界條件如圖1所示,主要部件的材料參數見表1。有限元模型中固定連接部分均使用Tie連接,在絕緣子螺栓孔處施加三向撓度約束,定位器與定位器支座之間使用面-面接觸方式,圖1中紅色圈出部分使用鉸接,為了避免銷釘剛性撓度,約束銷釘繞自身軸轉動。其中鋁合金腕臂結構中無定位管支撐,通過吊線將定位管與平腕臂上的承力索座連接起來,圖1中藍色虛線為吊線位置。在有限元模型中將吊線簡化為Link連接,見圖1中藍色圈出部分,使得兩連接部分通過約束獲得相同的運動狀態。
本文的加載模式分為兩種,參照OCS-3[13]技術條件要求,使用非工作支最大工作載荷對模型加載,校驗腕臂(包括平腕臂、斜腕臂和腕臂支撐)以及定位管的撓度水平,具體數值為在承力索座處施加水平載荷(Fh1)4 000 N,豎直載荷(Fv1)4 000 N;在定位器線夾位置施加水平載荷(Fh2)4 500 N;并按非工作支最大工作載荷的1.5倍對模型加載,校驗腕臂的應力水平。
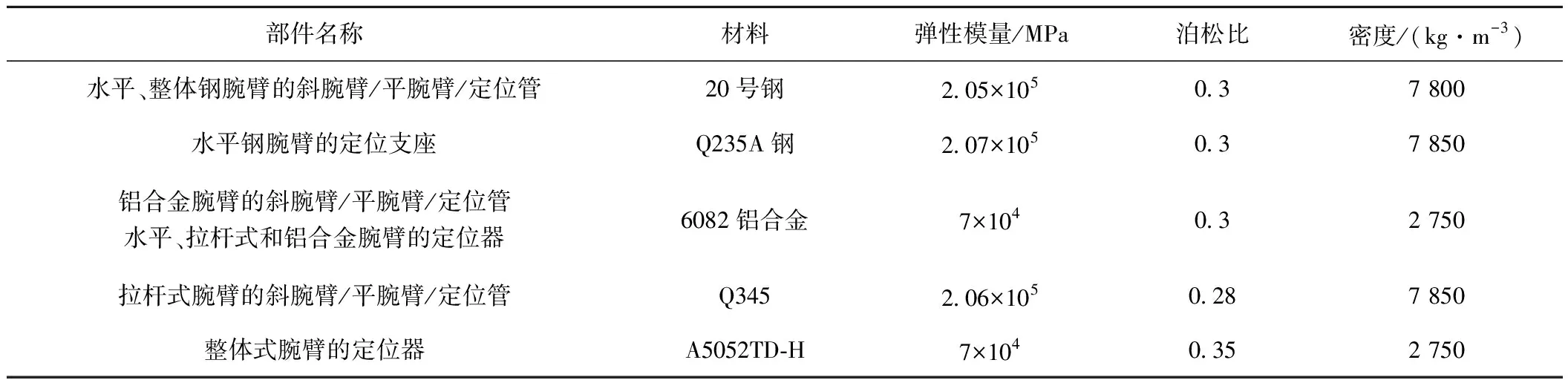
部件名稱材料彈性模量/MPa泊松比密度/(kg·m-3)水平、整體鋼腕臂的斜腕臂/平腕臂/定位管20號鋼2.05×1050.37 800水平鋼腕臂的定位支座Q235A鋼2.07×1050.37 850鋁合金腕臂的斜腕臂/平腕臂/定位管水平、拉桿式和鋁合金腕臂的定位器6082鋁合金7×1040.32 750拉桿式腕臂的斜腕臂/平腕臂/定位管Q3452.06×1050.287 850整體式腕臂的定位器A5052TD-H7×1040.352 750
2.2 水平鋼腕臂
計算得到的水平鋼腕臂應力和撓度結果如圖2所示。從圖2(a)可以看出,該腕臂結構中水平腕臂應力比斜腕臂大,且腕臂支撐處應力較小,腕臂支撐可以適當減輕主要連接位置的應力集中情況,應力最大值在定位器鉤、定位支座環接觸位置處的定位支座上,其值為155.5 MPa。該應力值小于其使用的Q235A鋼材的許用應力156.7 MPa,滿足文獻[14]要求。
圖2(b)為水平鋼腕臂結構在施加載荷后的撓度云圖,可見最大撓度出現在定位器上,這是因為在實際工作時,定位器與接觸線拉力平衡,定位器受兩側拉力作用,導致最大撓度出現在其中部。根據OCS-3[13]技術條件要求規定,在最大工作荷重條件下,鋼腕臂或定位管的撓度不大于0.7%L,分析結果表明構件中最大撓度值出現在斜腕臂上,經計算滿足文獻[14]要求(定位器撓度并未在技術要求考察范圍內,因此本文僅對腕臂、定位管和定位管支撐進行了校核,圖中所示為校核部件中出現的最大撓度值,并未包括定位器上的撓度值。以下其他3種腕臂結構撓度校核分析與此處遵循相同原則)。

(a)應力分布
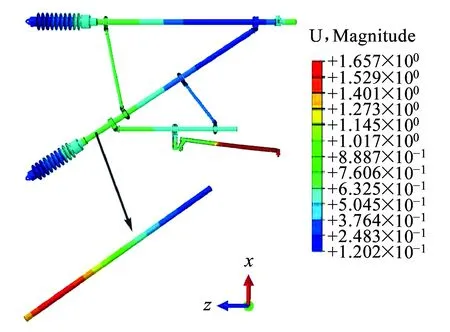
(b)撓度分布圖2 水平鋼腕臂應力分布和撓度結果
2.3 鋁合金腕臂
計算得到的鋁合金腕臂應力和撓度結果如圖3所示。由圖3(a)可知,在1.5倍最大工作載荷作用下,其應力分布情況及應力最大值出現位置與水平鋼腕臂結構類似,最大值在定位器鉤、定位支座環接觸位置處的定位器鉤上,其值為166 MPa,該值低于定位器使用的鋁合金的許用應力值175.3 MPa,強度符合文獻[14]要求。
圖3(b)為鋁合金腕臂結構在施加載荷后的撓度分布情況,最大撓度出現在定位器與接觸線接觸位置。根據OCS-3[13]技術條件要求,在最大工作荷重條件下,鋁合金腕臂和定位管撓度不大于1.0%L。分析結果表明構件中最大撓度值出現在定位管上,經計算滿足文獻[14]要求。

(a)應力分布
(b)撓度分布圖3 鋁合金腕臂應力分布和撓度結果
2.4 拉桿式腕臂
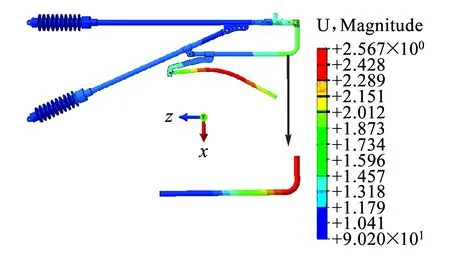
計算得到的拉桿式腕臂應力和撓度情況如圖4所示。由圖4(a)可知,水平拉桿應力比斜腕臂小,受力以斜腕臂為主。腕臂支撐處應力較小,支撐可以適當減小。應力主要分布于腕臂結構的連接處,最大值在定位管與定位器調節柱連接位置處的定位管上,其值為191.6 MPa。這是因為定位器調節柱較長,與定位管連接位置承受大彎矩,所以此處應力水平較高。但該值遠低于調節支柱所使用的Q345鋼的許用應力230 MPa[14]。
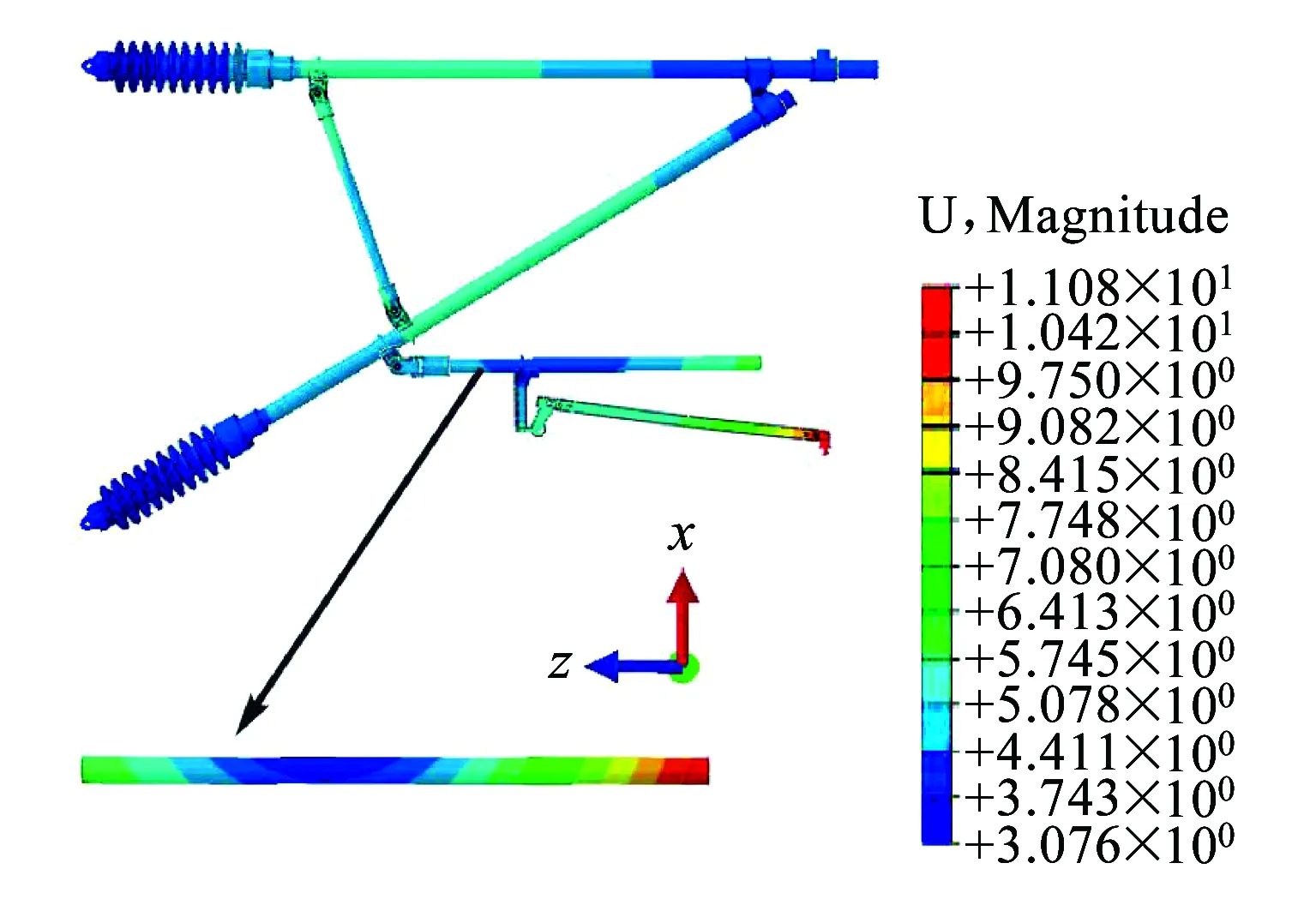
圖4(b)為拉桿式腕臂結構在施加載荷后的撓度分布情況,最大撓度出現在定位器管上,由于定位器兩端受拉力,且定位調節柱屬于懸臂梁,撓度加到定位管上,導致定位器管與接觸線接觸處撓度最大。根據OCS-3[13]技術條件要求,在最大工作荷重條件下,鋼腕臂、定位管和定位管支撐的撓度不大于0.7%L。分析結果表明構件中最大撓度值出現在定位管上,經計算滿足文獻[14]要求。

(a)應力分布
(b)撓度分布圖4 拉桿式腕臂應力分布和撓度結果
2.5 整體式腕臂
計算得到的整體式腕臂應力和撓度分布情況如圖5所示。從圖5(a)可知該結構最大應力在斜腕臂雙耳與平腕臂連接位置,其值為127.7 MPa,數值遠低于其材料20號鋼的許用應力183.33 MPa[14]。由于結構高度較小且連接件較少,整體鋼腕臂應力水平稍小于其他腕臂結構。

(a)應力分布
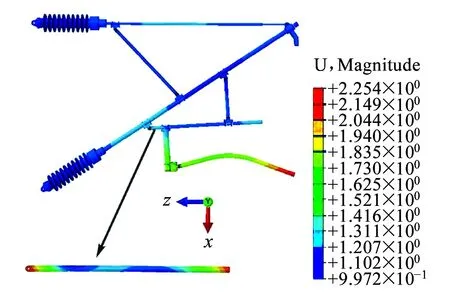
(b)撓度分布圖5 整體式腕臂應力分布和撓度結果
圖5(b)為整體式腕臂結構在施加載荷后的撓度分布情況,最大變形位置在定位器管中間處。根據OCS-3[13]技術條件要求,在最大工作荷重條件下,鋼腕臂及其定位管的撓度不大于0.7% L。分析結果表明構件中最大撓度值出現在定位管上,經計算滿足文獻[14]要求。
3 腕臂和定位裝置優化設計方案
3.1 設計原則
基于對上述現有腕臂結構的特點分析,結合我國不斷提高的接觸網要求,對新型腕臂和定位裝置的優化方案提出以下設計原則:
(1)腕臂結構應安全穩定可靠,局部和整體變形均滿足規定要求。
(2)腕臂結構應盡量簡單,視覺效果好,集成零部件的結構和功能,減少零部件數量。
(3)腕臂結構應便于現場施工安裝,既要有下料、組裝、調整的靈活性,又要有較高的安裝精度。
(4)定位裝置在輕量化的前提下保持結構穩定,具有較好的靜態和耐疲勞性能。
(5)定位器與受電弓外形及動態包絡線應具有良好的匹配性,有較大的抬升空間,保證空間安全距離。
(6)定位器與定位支座應連接可靠,盡量增大連接接觸面積,減少相互磨損,提高電氣連接性能。
(7)腕臂和定位裝置本體應采用通用型材,連接件優先采用型材制造,采用穩定可靠的模鍛、沖壓等工藝。
(8)腕臂和定位裝置應具有較好環境適應性,提高防腐性能,連接件應具有較好的防松性能,減少運營維護工作量。
3.2 方案設計及特點
在設計原則的指導下,吸納現有腕臂和定位裝置的優點,本文設計了一種新型腕臂和定位裝置,其主要特點如下:
(1)集成承力索座與套管座、定位環與支撐卡子的功能結構,采用組合式零件。
(2)腕臂支撐、定位管支撐采用實心型材代替管材+單耳結構,減少零件數量。
(3)承力索座、定位環、定位底座等連接件采用少螺栓、安裝便捷、帶獨立雙耳的鉸鏈式抱箍結構,大幅度減少螺紋連接數量。
(4)鋁合金連接件用鍛造工藝代替鑄造,避免鑄造缺陷,提升產品質量。
(5)定位器采用與受電弓包絡線匹配性好、空間安全裕度大的弓形結構,與定位底座連接采用非限位、銷軸鉸接方式,定位線夾雙夾板配套T型定位銷釘,電氣導通和耐磨性好。
上述新型腕臂和定位裝置正定位結構如圖6(a)所示,反定位結構示意圖如圖6(b)所示。

(a)正定位結構
(b)反定位結構圖6 新型腕臂和定位裝置方案結構示意圖
新型腕臂結構與常用腕臂結構零件數量、螺紋副數量、緊固力矩種類對比見表2。從表2可以看出,新型腕臂支撐及定位裝置通過采用鉸鏈抱箍連接和相近功能組合方案,大幅度提高了零部件的一體化程度和集成度,結構更加簡潔合理,防松、耐磨,可靠性大幅度提高。與鋁合金腕臂裝置相比每套裝置零部件數量由23件減少為14件,減少了39%;螺紋副數量由原裝置的30套減少為13套,減少了57%;螺紋副緊固力矩種類由6種減少為3種,減少了50%。同樣與拉桿式和整體式腕臂相比,連接件數量均不同程度減少。可以看出新型腕臂結構有效降低了施工安裝和運營維護的工作量。
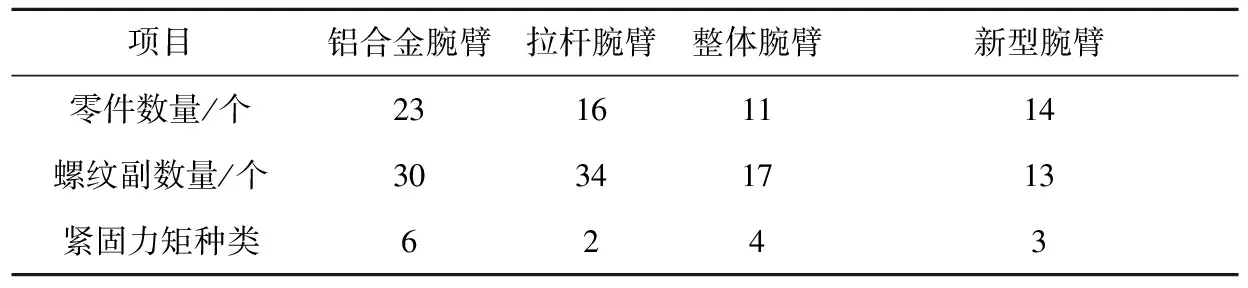
表2 零件、螺紋副數量、緊固力矩種類對比
3.3 靜力校核
同樣對新型腕臂和定位裝置結構建立三維模型,建模時均依據真實情況簡化了連接部位,螺栓變為銷釘,不考慮螺栓預緊力,將定位鉤、環連接處變為鉸接。利用有限元軟件對建立好的模型進行靜力學分析,網格劃分采用C3D8R單元。有限元模型中固定連接部分均使用Tie連接,在絕緣子螺栓孔處施加三向撓度約束,定位器與定位器支座之間使用面-面接觸方式,為了避免銷釘剛性撓度,約束銷釘繞自身軸轉動。同樣按非工作支最大載荷對模型加載,具體數值與計算驗證現有典型腕臂結構時加載數值相同(參照OCS-3[13]技術條件要求)。
圖7所示為計算得到的新型腕臂應力分布情況,可以看到應力整體分布均勻,正定位時最大應力為114 MPa,反定位最大應力為145 MPa,均位于定位管上,小于6082(T6)鋁合金的許用應力167 MPa;同樣對撓度分布情況進行了校核,正定位時最大撓度為5.3 mm,位于斜腕臂上,反定位時最大撓度18 mm,位于定位管上,均不大于1.0%L。因此新型腕臂結構方案的整體強度和剛度均滿足要求。
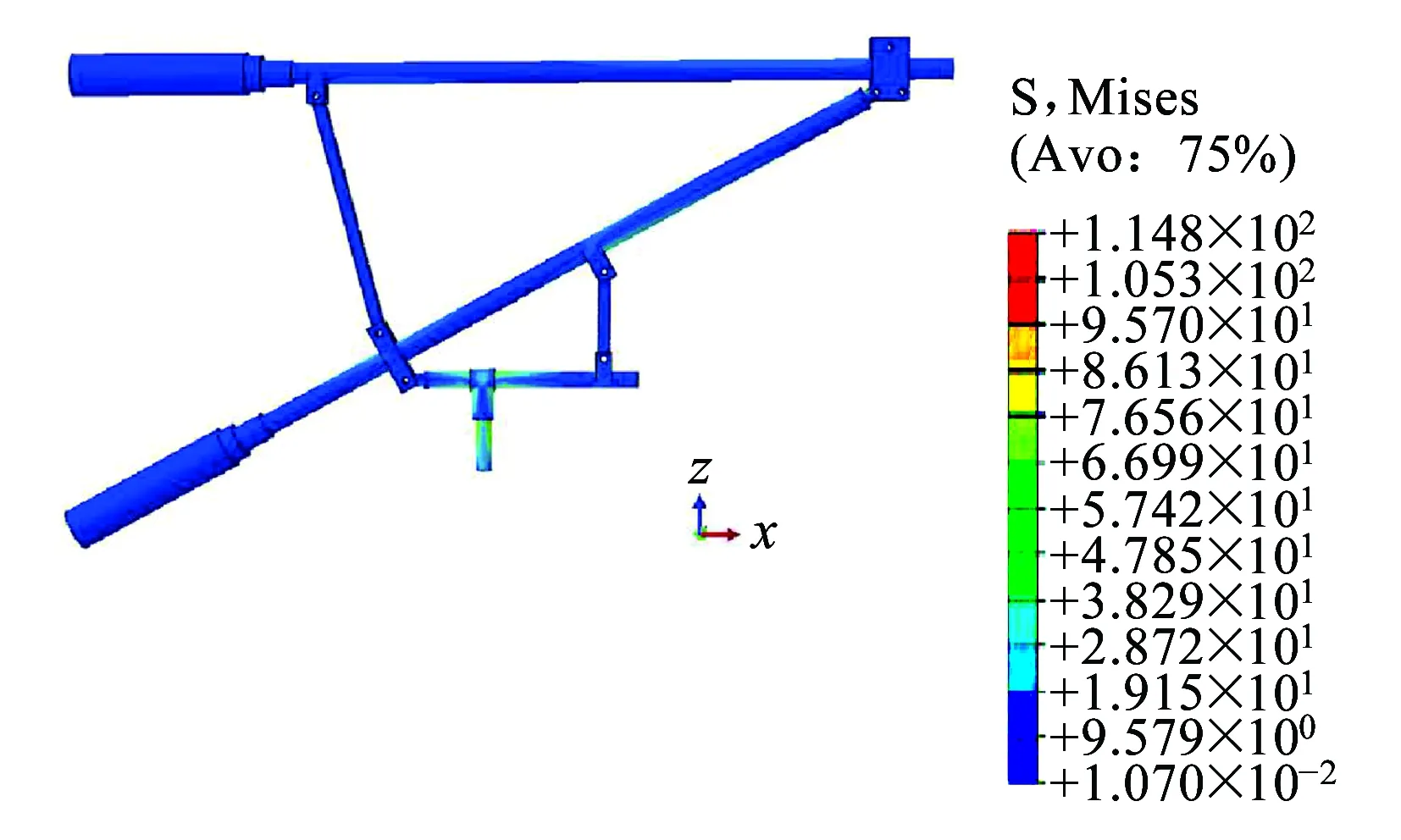
(a)正定位

(b)反定位圖7 新型腕臂和定位裝置方案應力分布校核結果
4 結論
本文對4種腕臂和定位裝置的結構、材質、連接件等以及結構靜力學特性進行分析,根據腕臂和定位裝置的功能需求和現狀中存在問題的分析,設計了一種新型腕臂和定位裝置的結構。通過計算與分析,得到如下結論:
(1)各典型腕臂結構均能滿足鐵路標準中規定的應力和撓度要求;3種鋼腕臂結構撓度相近,鋁合金腕臂撓度稍大;腕臂支撐處應力較小;平腕臂結構中水平腕臂應力較斜腕臂大,拉桿腕臂結構中水平拉桿應力較斜腕臂小;應力在連接件處較大。
(2)新型腕臂和定位裝置的結構方案采用集約化的組合式連接件,結構更加簡潔、合理,并具有較高的防松、耐磨和可靠性,弓網匹配好,安全裕度大,電氣導通和耐磨性好。新型接觸網裝置不僅內在質量和外觀品質有所提升,其服役性能和使用壽命同樣有較大提升。利用有限元靜態分析方法對所提出的新型腕臂和定位裝置的結構方案進行校驗,結果符合設計規范要求。
本文僅對現有高速鐵路典型腕臂結構和所提出新型腕臂結構進行了靜力學特性分析,不足以全面說明腕臂結構的力學特性。筆者正在研究基于工作載荷譜的新型腕臂結構動力學特性分析,以豐富腕臂結構力學特性的理論基礎,并在未來提出基于靜力學、動力學仿真綜合分析的接觸網系統腕臂結構優化方案。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
