基于光纖傳感檢測的礦井人員定位方法*
2018-10-17 06:43:02應啟瑞張建國靳寶全
傳感技術學報 2018年9期
劉 昕,應啟瑞,張建國,董 齊,王 宇,王 東,靳寶全,2*
(1.太原理工大學新型傳感器與智能控制教育部與山西省重點實驗室,太原 030024;2.煤與煤層氣共采國家重點實驗室,山西 晉城 048012)
煤炭是我國的主要能源,受煤礦開采條件限制,井下安全形勢仍然不容樂觀。發生重大災害事故時,通信是否暢通對于煤礦井下救援工作非常重要,甚至直接關系到救援的成敗。但許多災害事故發生時會導致信息阻斷,通信不暢,使得救援人員不能及時準確地獲知井下災變信息,無法取得受困人員的具體分布區域和方位,難以在第一時間實施救援,一定程度上影響了救災搶險指揮決策[1]。目前,煤礦井下應急救援定位方法主要通過WIFI,ZigBee,甚低頻電磁波等無線通訊技術,實現井下工作人員的通信與定位[2-5]。
然而,由于井下地形復雜,工作環境惡劣,這些方法依然存在如下問題:某些情況下通信系統短路或水中浸泡無法正常供電,即使可以供電,受限于現有的供電方式,在災害發生時只能依托備用電源供電,往往只能維持數小時,甚至更短。某些情況下為防止次生事故,將完全切斷礦井下電力供應,現有的通信系統和帶電裝置也不允許上電使用。無線信號在井下復雜工作環境下衰減較快,為保證定位精度,需大量增加定位節點數量,全覆蓋布設難度很大。甚低頻電磁波透地通信方式的主要缺點是受困人員必須隨身攜帶通訊裝置,而該類設備成本高,無法實現人手一部,因此覆蓋面較窄。由于這些問題,使得以上煤礦井下應急救援通訊定位方法應用受限。
Φ-OTDR(Phase-sensitive Optical Time Domain Reflectometer)相位敏感型光時域反射技術作為一種分布式振動的新型監測方案,由于具有長距離、分布式、無電傳感的特點[6-8],近年來在國內外得到了廣泛關注。該技術由Taylor H F等人于1993年首次提出[9],利用脈沖激光注入單模光纖后的傳播特性,在光脈沖寬度內的后向瑞利散射光會發生自相干,作用于光纖的外界振動會改變光纖折射率并導致傳輸光相位的變化,因而可通過探測后向瑞利散射光的干涉光強來還原外界振動信號。由于瑞利散射信號非常微弱,因此對振動信號的檢測與定位一直是國內外研究的熱點。重慶大學朱濤等人采用相干法、移動平均算法和快速FFT變換提取了振動波形的頻率[10]。中科院上海光學精密機械研究所蔡海文等人提出基于多頻率綜合鑒別干涉衰落假信號的相位解調技術,獲取到高精度的相位分布信息[11]。南京大學張旭蘋等人通過相位展開算法,對振動進行定量測量[12]。上述方法均推動了Φ-OTDR系統信號解調與處理技術的發展。煤礦井下應急救援定位對系統實時特征提取提出了更高的要求,因此需要一種能對Φ-OTDR系統進行快速實時振動監測與準確定位的方法。振動信號的實時提取對解調算法、數據采集和傳輸速度要求極高,FPGA的發展為解決上述問題提供了技術手段。FPGA由于并行運算、靈活度高和高速處理等優點,適用于信號的高速采集[13-15]。本文設計一種Φ-OTDR振動信號高速采集系統的FPGA實現方案,以FPGA控制芯片為主要控制單元,利用AD9226高速采集芯片和PL2303芯片組成采集和數據傳輸硬件系統,具有采集速度快、精度高、傳輸性能穩定、實時性好的優點,以滿足實時顯示振動頻率與波形信息的需求。
本文提出基于光纖傳感檢測的礦井人員定位方法,利用既有的通信光纜既作為傳感器又作為通信介質,具有本質安全,無電傳輸,抗干擾強的特點,可實現長達幾十公里的分布式監測,其傳感距離可覆蓋整個礦井,災害發生后,即使無電也能對井下工作人員拍擊信號進行有效定位,解決災變發生之后被困人員與救援機構第一時間聯絡定位的問題。
1 振動監測原理
光在傳播過程中,通過長度為l0的光纖所產生的相位延遲量φ為:
(1)
式中:λ為光的波長,β為傳播常數,n為光纖折射率。當外界振動作用于傳感光纖時,光纖因受壓力P的作用,折射率發生改變,進而導致光相位變化,其變化量Δφ為[16]:

(2)
(3)
(4)
式中:Δφε,Δφs分別為應變效應和光彈效應造成的相位變化,ετ為縱向應變張量,E為光纖的楊氏模量,μ為光纖的泊松系數,k0≈β/n,S為光彈張量系數值。相位變化量Δφ與壓力P的關系如下:
(5)
因此,相位變化量Δφ與振動施加給光纖的壓力P成正比,可以通過解調光相位來獲得外界振動信號。同時,通過入射脈沖光與接收后向瑞利散射光的時間延遲來定位振動信號的位置x:
(6)
式中:t0為后向散射光強度發生變化的時刻。系統實驗原理如圖1所示,窄線寬激光器發出連續激光,通過偏振控制器調整偏振態后由聲光調制器將其調制為脈沖光,經摻餌光纖放大器(EDFA)增強功率后通過環行器注入到傳感光纖中。最后,高速采集系統通過探測器接收到的后向瑞利散射信號來實時采集并解調光纖周界的振動信息。
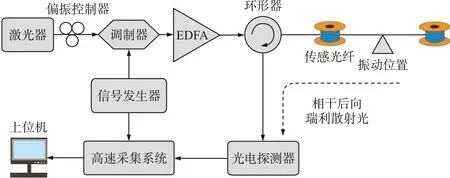
圖1 Φ-OTDR振動監測系統
圖2所示為后向瑞利散射波形。定位振動點需要大量數據進行差分累加運算,實驗中采用高速采集裝置對后向散射信號進行采集,并使用數據處理軟件對信號進行分析。
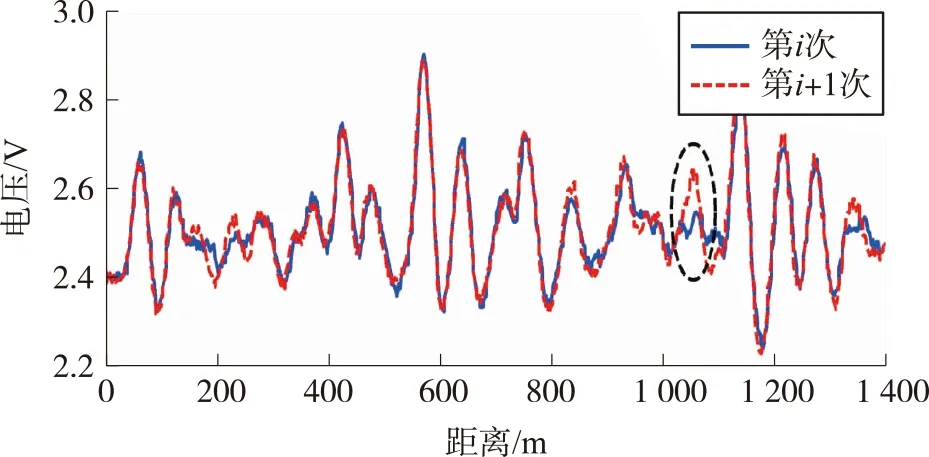
圖2 后向瑞利散射波形
圖2中實線代表第i次采集的數據,虛線代表第i+1次采集的數據。在振動施加處(約1 100 m)之外,兩者在整個傳感距離上差異很小,而在振動點處差異非常顯著,證明在該點處振動信號的存在。由于信號信息量大,而受到采集傳輸速度的限制,振動信號實時提取與還原是一項技術難題。因此需要結合高速A/D與FPGA技術進行數據的快速采集和處理,在振動處實現波形的實時提取與定位。
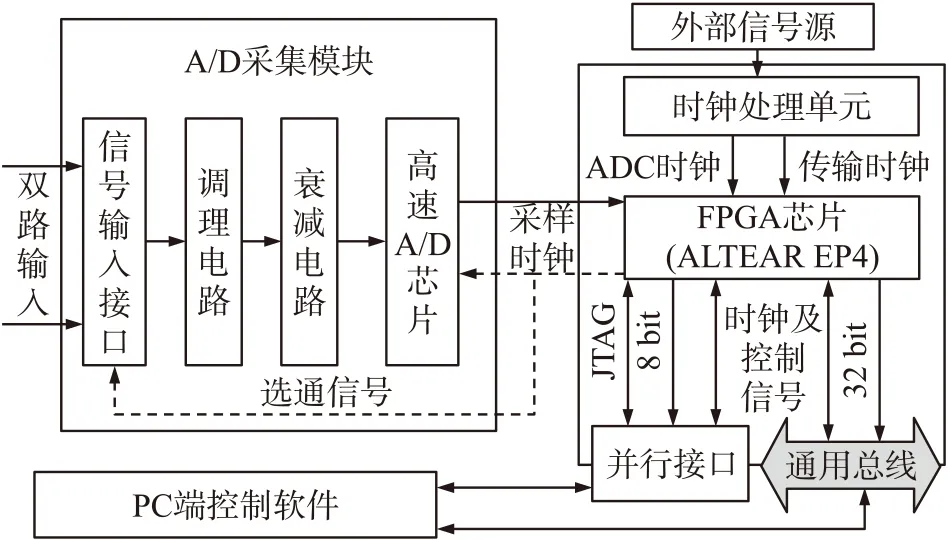
圖3 采集系統原理圖
2 高速采集系統
高速數據采集原理如圖3所示。光電探測器檢測到的后向瑞利散射信號經FPGA(Altera,EP4CE617C8)控制選通的通道進入高速采集系統,經由信號調理電路和衰減電路處理后由高速A/D芯片將模擬信號轉換為數字信號輸出至FPGA進行存儲。同時,在FPGA中設計時鐘處理單元和存儲單元用于控制 A/D 的采樣時序、同步信號和數據存儲。PC端控制軟件通過2種方式與FPGA進行通訊,通過并行接口與FPGA進行系統程序的調試并控制系統的復位、工作使能、模式選擇等,FPGA也將運行狀態如存儲器的存放信息等反饋給PC,相互配合進行系統的控制。為了保證信號提取的實時性,上位機通過通用總線對系統的數據進行控制傳輸和實時顯示,完成對光纖振動信號的采集。
2.1 A/D轉換電路
Φ-OTDR振動信號高速采集系統要求數模轉換電路具備較高的轉換效率與采樣精度,以滿足振動信號監測的實時性與精確性要求。為保證Φ-OTDR系統具有較好的檢測精度,當A/D的轉換速率在50 MS/s以上,轉換位數在10位以上時,此時采樣間隔為2 m,從而能夠較好地檢測出外界振動信號。因此,選用采樣精度為12位、轉換速率為65 MS/s的AD9226芯片。
由于AD9226的芯片ADIN端口電壓為1 V~3 V,而ADIN輸入端的實際電壓Vin為-5 V~+5 V,因而需要設計衰減電路進行電壓匹配,如圖4所示為采集模塊衰減電路。
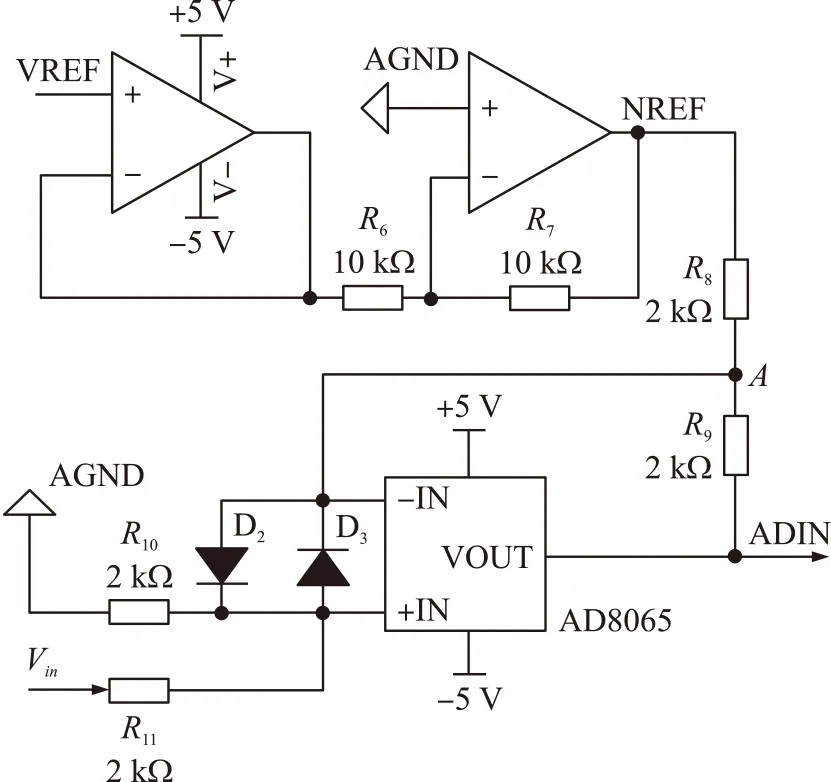
圖4 采集模塊衰減電路
圖4中VREF端輸入的電壓為2 V,根據電壓跟隨和放大原理,可得NREF的電壓VN為-2 V。因而輸出電壓為Vout為:
VA=Vin×(R10/R11)
(7)
Vout=VA+R9×(VA+VN)/R8
(8)
(9)
即當輸入Vin為-5 V~+5 V時,輸出電壓Vout為1 V~3 V。AD9226時序圖如圖5所示。

圖5 AD9926芯片時序圖
邏輯輸入端口外接模擬信號,時鐘端口通過監測信號上升沿來觸發數據采集,再經數據輸出端口還原出接入系統的模擬信號波形。A/D采樣率越高,對應波形采集的點越多,信號還原度越高。由圖5中時序圖可知,通過FPGA控制時鐘信號即可實現A/D芯片的信號采集。
2.2 USB傳輸電路設計
系統選擇通過USB芯片將A/D采集的數據傳輸給上位機,實現系統的實時傳輸。設計電路采用集成RS232-USB轉換器的PL2303芯片,將接收的數據轉換為USB數據格式,并與上位機進行數據傳輸。PL2303芯片的外圍電路如圖6所示。
圖6中VDD1為USB端口的5 V供電電源,VDD2為RS232的3.3 V供電電源,OSC1和OSC2產生12 M的晶振,DP和DM端口分別與USB端口的D+和D-進行通訊,TXD和RXD進行串口的數據輸出和輸入。
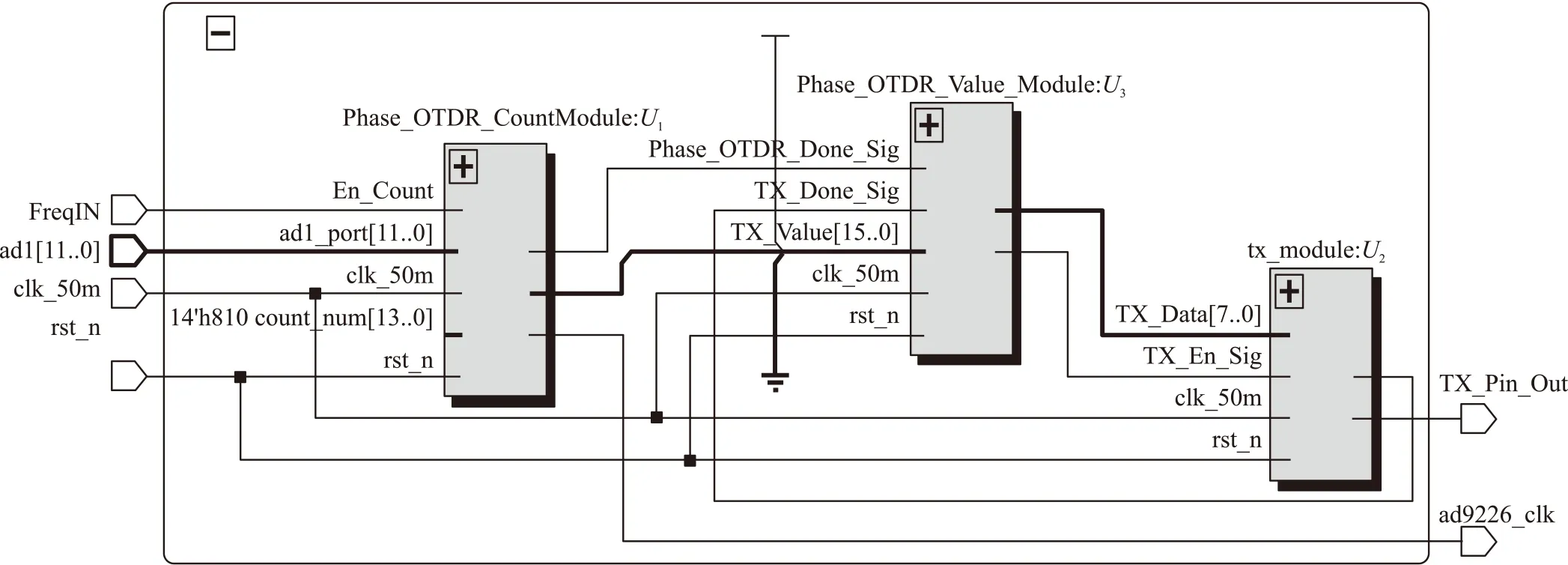
圖8 整體系統RTL視圖
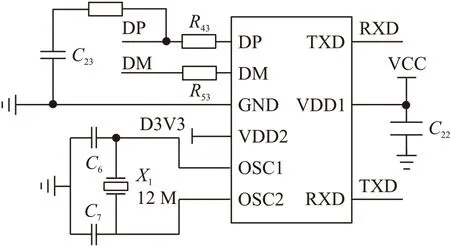
圖6 PL2303芯片外圍電路示意圖
3 軟件系統設計
軟件系統主要分為A/D采樣和串口數據傳輸兩部分,通過Verilog HDL語言編寫上述模塊,生成的兩個主要RTL視圖如圖7(a)~(b)所示。
圖7(a)是采集模塊的RTL封裝視圖,圖7(b)是傳輸模塊的RTL封裝視圖。采集模塊的輸入信號為:使能信號En_Count用于控制采集的開始、數據輸入ad1_port[11..0]為AD9226的12位數據線、輸入時鐘clk_50M為FPGA的晶振時鐘、復位信號rst_n用于整個模塊復位,低電平有效,以及選取采樣點的計數輸入count_num[13..0],用來控制選取振動采樣數目。
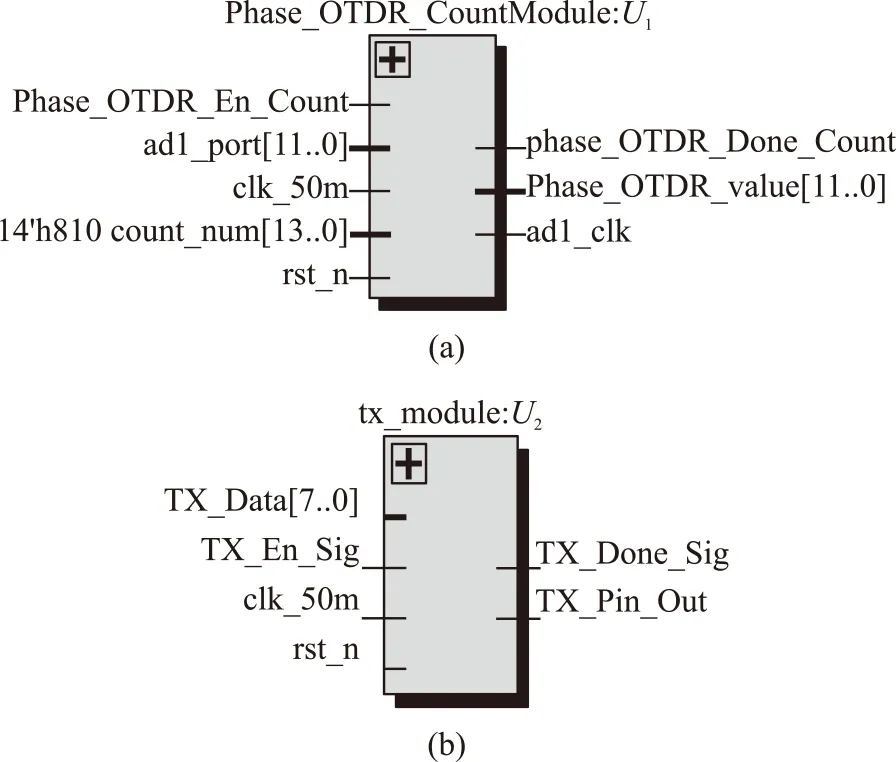
圖7 采集模塊和傳輸模塊RTL視圖
傳輸模塊的輸入信號為:傳輸數據輸入TX_Data[7..0]為串口發送的數據、傳輸使能信號Tx_En_Sig控制串口發送數據、時鐘控制輸入clk_50M為串口波特率時鐘、復位信號rst_n用于復位整個傳輸模塊。
整體系統RTL視圖如圖8所示。采集模塊Phase_OTDR_CountModule將采集到的數值輸出至數據處理轉換模塊Phase_OTDR_Value_Module,將數據轉換為串口傳輸模塊的輸入信號,進而通過串口傳輸模塊tx_module將數據輸出至上位機。
4 系統測試結果
利用SignalTap Ⅱ觀測FPGA的內部信號,輸入信號為50 Hz正弦波,設置采樣深度為2 k、采樣時鐘頻率8 kHz,測到的輸入數據和各A/D端口的輸出如圖9 所示。
由圖9可知,隨著輸入正弦信號幅值周期性的變化,A/D輸出的12位端口的數據也發生對應的周期性變化,從而證明該采集系統工作滿足要求。

圖9 SignalTab Ⅱ觀測到的采集波形
將程序寫入高速采集系統的FPGA內核。實驗測試首先采用規律性拍擊信號作用于傳感光纖,光纖對應于振動位置處單點振動信號的監測結果如圖10所示,證明系統能實時響應拍擊所施加的振動信號。

圖10 規律性拍擊時域信號圖
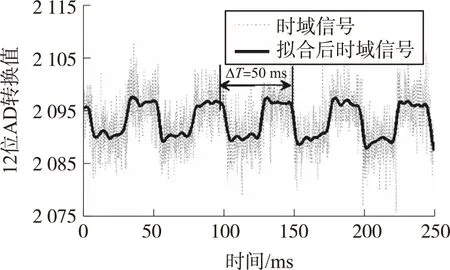
圖11 方波激勵時的探測信號
隨后,用壓電陶瓷模擬外界振動,振動激勵信號為幅值±10 V、頻率20 Hz的方波。實驗結果如圖11所示,其中虛線為實時采集到的振動信號波形,實線為擬合后的振動信號波形。結果顯示,在20 Hz方波信號的激勵下,通過對時域信號擬合,還原出的振動信號為頻率f=1/ΔT=20 Hz的方波信號,與振動源波形一致。
將振動源激勵信號改變為幅值±10 V、頻率200 Hz的正弦波,同樣將采集的單點振動時域信號進行擬合運算,還原出振動信號的波形,擬合后的波形如圖12所示。
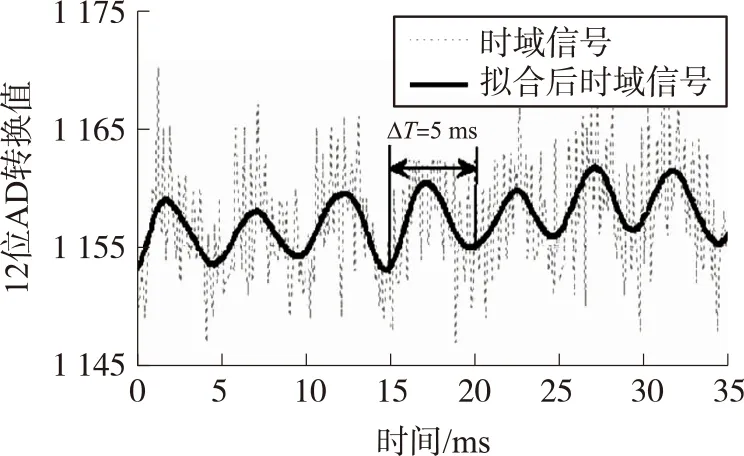
圖12 正弦波激勵時的信號
結果顯示,還原出的振動波形信號的頻率為f=1/ΔT=200 Hz,準確還原出了振動源的振動信息。雖然采集過程中的環境噪聲和振動傳感系統本身存在的漂移問題導致擬合出的振動信號存在小范圍的抖動,但并不影響提取出的振動信息有效性。
為了驗證外界擾動信號振動頻率與監測到的振動頻率間的關系,在100 Hz到1 000 Hz的頻率范圍內,以100 Hz為步進來改變驅動壓電陶瓷的激勵信號,作為輸入信號的頻率,同時分析10組高速采集系統探測到的數據,以判斷系統的頻率響應。
圖13所示的系統探測頻率y與實際驅動信號的振動頻率x的擬合線性關系式為y=0.992 5x-4.614,擬合的線性度為0.995 07,由此可知外界振動信號的頻率與系統監測到的頻率基本保持一致。
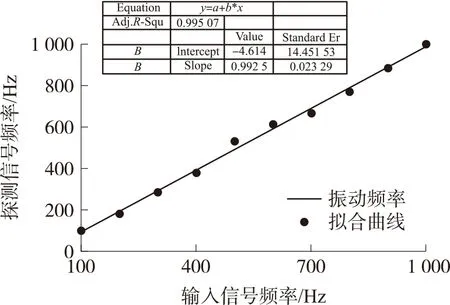
圖13 頻率線性擬合
隨著光纖距離的增加,后向瑞利散射光越來越微弱,因此,越后端的振動信號檢測難度越大。分別在10 km、12 km附近施加振動信號,定位結果如圖14所示。從圖14可以看到在10.07 km處有明顯的尖峰,在12.01 km處雖然信噪比較低,但仍然可以觀測到振動發生,證明系統傳感距離可達12 km。
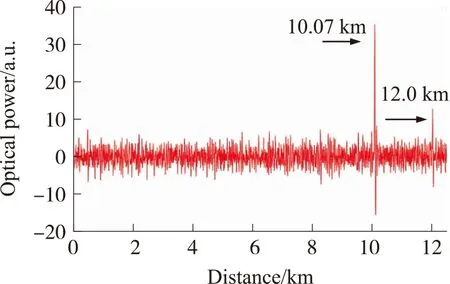
圖14 振動定位結果
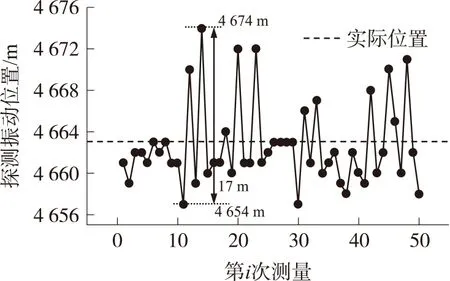
圖15 4 663 m處定位誤差測試圖
為了測試系統定位誤差,選取了兩個振動測試位置,分別在4 663 m和10 022 m。在同一位置處重復進行50次人員觸碰檢測,圖15和圖16所示為定位的結果。圖中紅色虛線為實際振動位置,黑色散點為定位結果。從圖中可以看到,綜合定位誤差范圍為-7 m~+11 m。
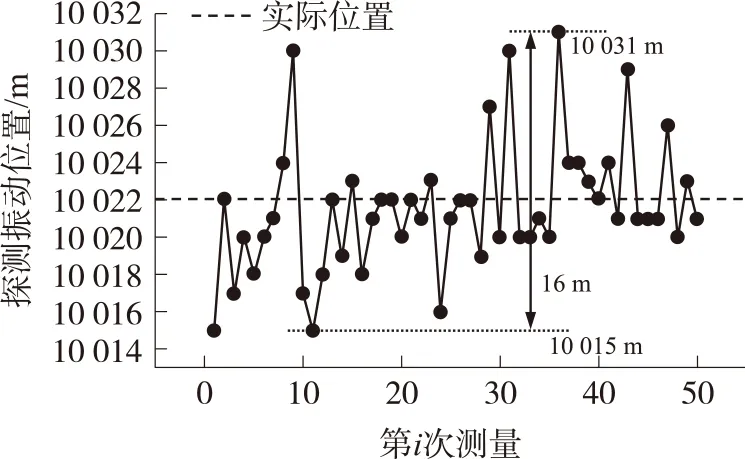
圖16 10 022 m處定位誤差測試圖
5 結論
本文通過利用基于Φ-OTDR技術的振動提取原理,FPGA硬件采集系統和軟件系統設計,構建出高速采集的Φ-OTDR振動監測系統。實驗選取規律性拍擊信號、20 Hz方波與200 Hz正弦波來模擬外界振動信號,測試結果表明該方法可以提取出外界振動信號的波形及頻率信息。同時,經驗證系統對1 kHz以下振動信號具有良好的頻率響應特性,可實現12 km范圍內振動精確定位,綜合定位誤差范圍為-7 m~+11 m。提出的基于光纖傳感檢測的礦井人員定位方法,可在災害發生后的惡劣環境下實現無電情況下人員的準確定位,從而為井下通信中斷時快速確定受困人員位置提供一種新的解決方案。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45