陀螺穩定平臺神經網絡滑模變結構控制
2018-10-13 06:40:10魯延娟李明秋
電光與控制
2018年10期
魯延娟, 李明秋
(長春理工大學,長春 130022)
0 引言
陀螺穩定平臺是一種安裝在運動載體上的光電跟蹤裝置,能夠對運動載體所受的擾動進行隔離,并保持平臺穩定[1]。在實際應用中,陀螺穩定平臺多用于飛機、導彈等場合,這些應用場合決定了陀螺穩定平臺應具有很高的快速性和魯棒性。
目前,實際應用的陀螺穩定平臺控制系統多采用PID控制。但是,基于PID控制的各種改進控制方案并不能有效地提高平臺的快速性和魯棒性[2]。針對這個問題,許多研究人員采用現代控制理論對陀螺穩定平臺進行控制,已有的文獻有些采用了H∞控制[3]和模糊控制方法[4-5]。但這些方法大多需要進行復雜的計算或精確的數學模型,因此很難在實際系統中應用[6]。本文以某吊艙為研究背景,針對其中的陀螺穩定平臺速度環控制系統,采用了以神經網絡逼近模型的未知部分的神經網絡滑模變結構控制方法。仿真實驗表明,該控制器的應用有效地提高了陀螺穩定平臺的快速性和魯棒性。
1 陀螺穩定平臺系統結構
兩軸四框架光電陀螺穩定平臺通過陀螺穩定隔離載體的擾動,保證探測器的視軸穩定地指向目標。實現這個控制目標的方法多種多樣,但基本上采用的都是機電框架結構。從控制系統的構成來講,每一個框架都具有相似的結構。一般來說,該框架包括一個內回路速度環和一個外回路位置環[7-8],其結構如圖1所示。
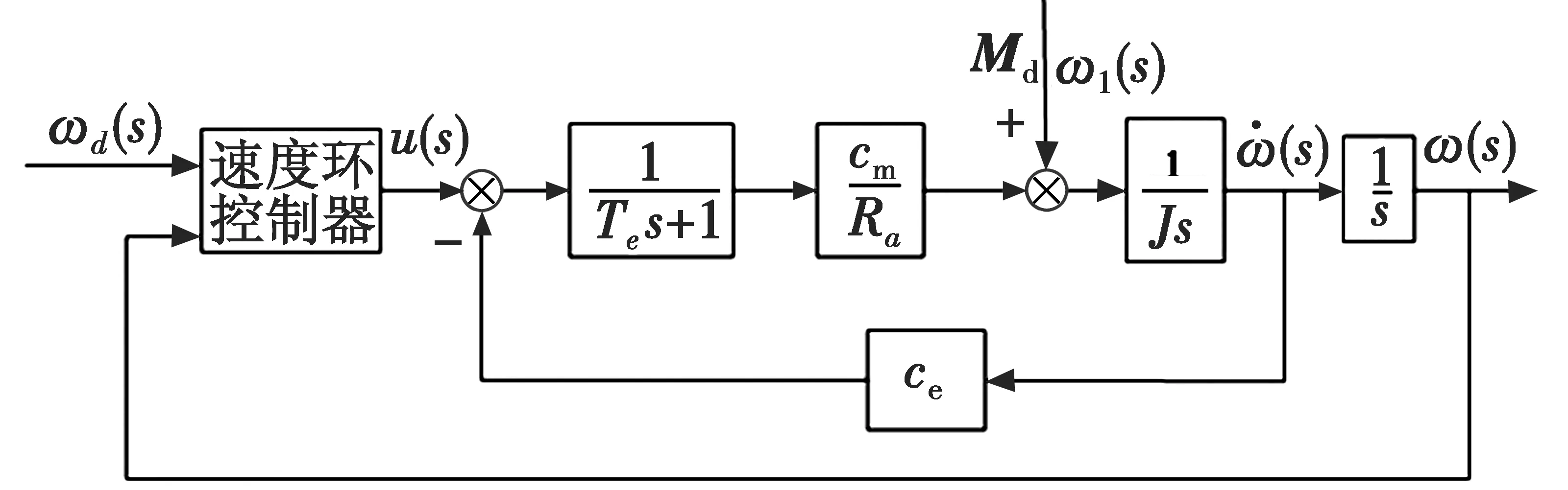
圖1 陀螺穩定平臺的單軸系統結構圖Fig.1 Uniaxial system of gyro stabilized platform
建立系統被控對象的狀態方程為
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
