基于雙輪自平衡小車的創新實驗課教學內容設計
2018-10-11 11:58:24錢玉恒楊亞非
實驗技術與管理 2018年9期
錢玉恒, 楊亞非
(哈爾濱工業大學 飛行器控制實驗教學中心, 黑龍江 哈爾濱 150001)
建設創新型國家已成為國家發展的核心戰略,培養創新人才、服務創新型社會是大學人才培養的中心任務[1]。我校在精英型科技人才培養目標指導下,結合國家創新型人才需求,集中實驗教學資源,開設了系列創新實驗課,自動化專業開設的“系統化、網絡化自動控制元件創新實驗課”(以下簡稱創新實驗課)就是其中之一。飛行器控制實驗教學中心已為課程配備了20多種實驗系統和對象供學生選擇,如三自由度直升機、探索者機器人、雙輪自平衡小車、扭矩儀、力矩陀螺、磁懸浮球等,經過多年創新實驗教學,教學內容日趨完善,許多實驗項目深受學生青睞,其中雙輪自平衡小車(以下簡稱平衡車)就極為典型。
平衡車占地面積小、小巧靈活、便捷環保,是青年人喜歡的短距離代步工具[2]。平衡車是運動式一級倒立擺,具有多變量、非線性、強耦合特點,是多輸入、多輸出的復雜控制系統,也是自動控制領域研究的經典對象[3]。選擇平衡車實驗對象既能能展現時代感,又能體現應用產品與自動化知識的緊密融合,含有寓教于樂特點。
1 課程教學目標與指導思想
課程圍繞自控元件和控制系統知識展開創新教學,面向全校工科類大二以上所有專業學生,共24學時、1個創新學分,是自動化創新實驗重要平臺,也是交叉專業學習自動化知識極佳平臺。課程指導思想是立足智知、鼓勵探究、追求問題、重在創新。教學目標是注重創新能力培養,兼顧設計能力、思辨能力及實驗能力鍛煉,提高學生科研水平。
平衡車創新課程任務是完成平衡車設計、制作及運動控制,其教學內容規劃了元件級、單元級及系統級3個層次,各層次配備多個實驗項目,以問題為核心設計每個實驗項目,讓學生在求疑、求異思辨過程中發現問題和解決問題。平衡車制作涵蓋電子、計算機、機械及控制等多學科知識,知識交叉特點顯著,制作中出現的電子元件、電子線路、機械部件、軟件及控制等各種問題很多,有利于創新思維錘煉和實施“問題式”教學[4]。
創新能力既要培養創新思維能力,也要培養智力能力和科研能力。課程采用元件化設計理念,設置元件層實驗,要求學生獨立設計電路,并要手工制作系統板、主控板及驅動板,加強動手能力鍛煉。設置單元層實驗,要求學生熟練使用檢測和執行部件,拓展學生知識面,實現觀察力、想象力及分析能力培養。
平衡車教學采用小組形式,每組通常4人以上,由學生推薦的組長負責實驗管理,組員既有分工又有合作,組員專業要盡量交叉。課程由學生主導實驗,教師只起輔助教學作用,多數問題由小組討論解決,即使遇到比較復雜問題,教師也只是參與討論,且不預設結論,挖掘學生潛能[5]。這樣,幫助學生獨立思考和科學追求,學生之間的相互協作和促進,可培育組織能力與合作精神,有助于學生科研素質的提高。
2 平衡車整體結構
全國大學生“飛思卡爾”杯智能汽車競賽的知名度很高[6],其中包括平衡車比賽項目。選用“飛思卡爾”平衡車實施教學,不僅授課成本低,且能激發學生創新興趣。平衡車系統整體結構見圖1。
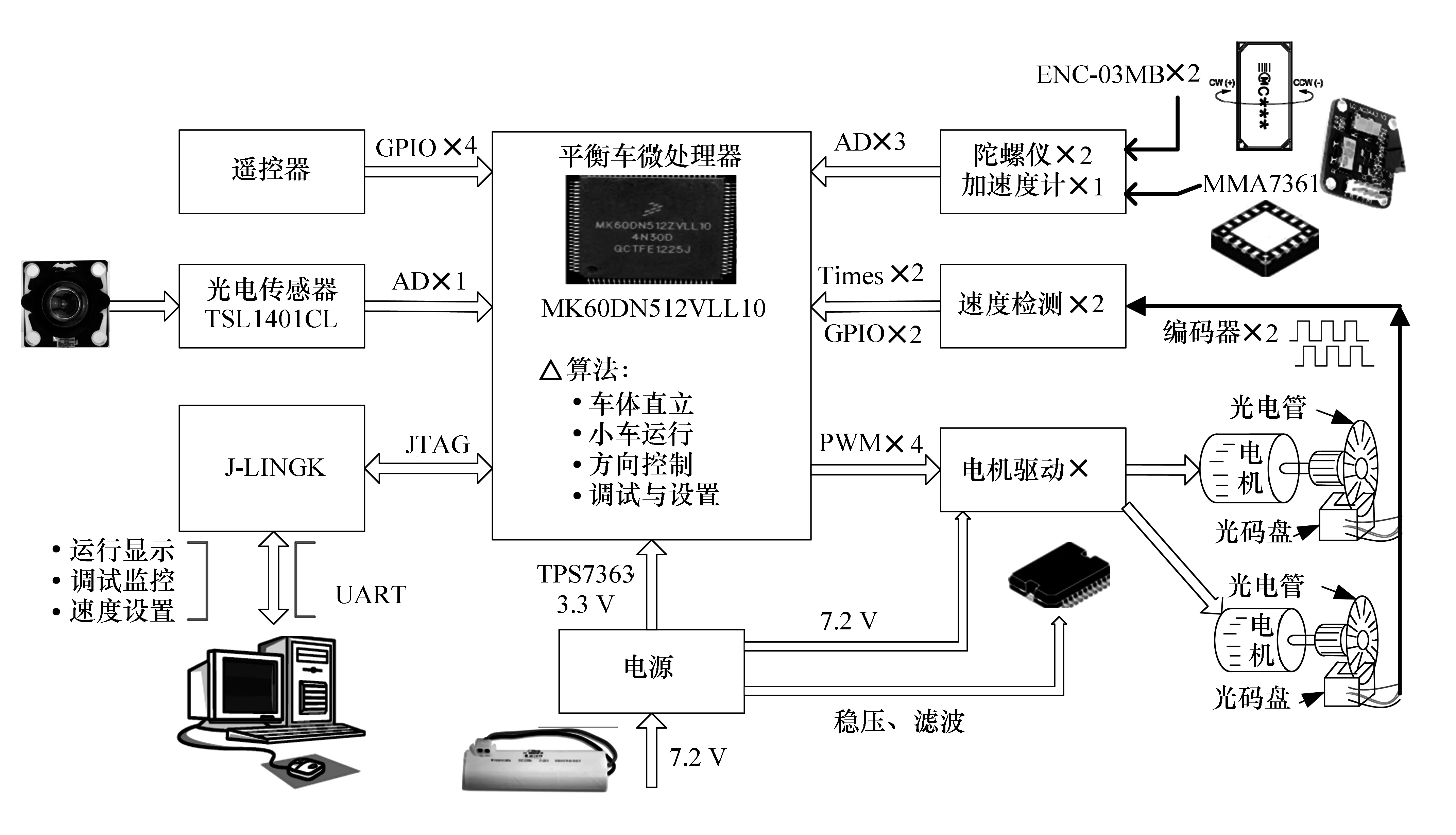
圖1 平衡車系統整體結構
課程選E型平衡車作車架基礎,包含車身、2個直徑6 cm車輪、2個直流有刷電機、減速齒輪組和7.2V電源。車架上加裝微處理器、陀螺儀和加速度計、光電傳感器、PWM驅動和遙控器等部件構成平衡車系統[7]。
平衡車微處理器采用32位MK60DN512VLL10芯片(K60),K60具有ARM Cortex-M4內核,適合復雜數據處理和運算,高精度AD易于采集傳感器參數,靈活IO中斷觸發利于硬件設計,FTM定時器模塊PWM通道可成對工作在相同輸出或互補輸出,省去了外圍死區電路。時鐘、濾波、穩壓等外部電路能有效保證微處理器正常工作。
平衡車微處理器調試軟件使用IAR Embedded Workbench,良好的集成開發環境(IDE)和全軟件模擬程序方便系統調試和模擬,高度優化的IAR ARM C編譯器方便程序編程。平衡車軟件功能主要包括傳感器信號采集和處理,電機PWM輸出,平衡車角度控制、速度控制及方向控制,以及輔助的初始化、狀態監控、參數設定等。
3 元件級認知實驗
平衡車含有20多種機械零件、50多種電子器件,熟悉這些元件是進行平衡車設計的基礎,靈活使用元件、合理組成線路是設計基本功。為此將系統板(微處理器、濾波、穩壓等電路)、主控板(降壓、濾波等電路)及驅動板(H橋、變壓等電路)制作設計成元件級實驗,實驗需要學生自主設計和動手焊接,掌握元件知識的精巧應用,將會極大提升學生認知能力。具體元件級實驗項目見圖2。
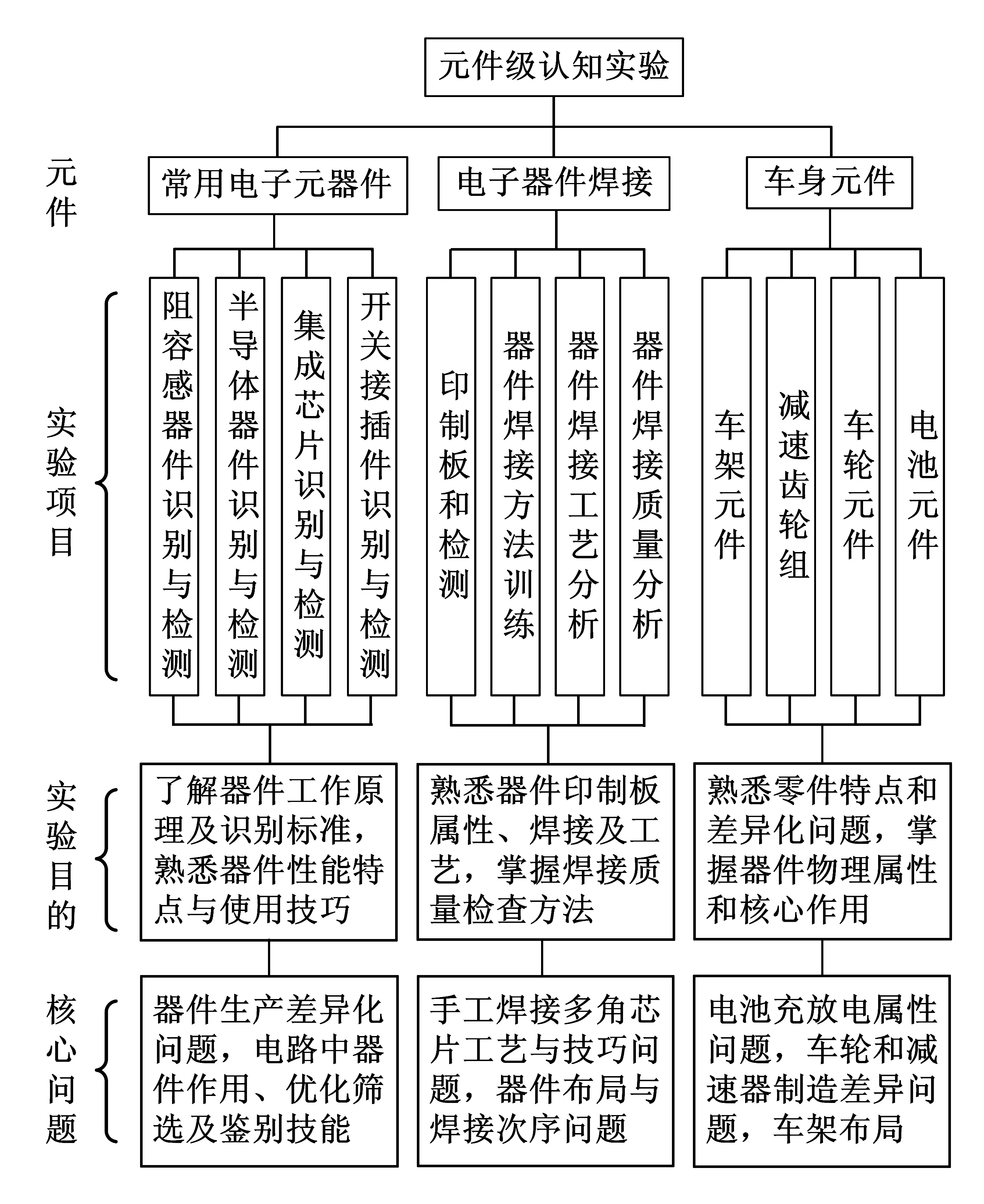
圖2 元件級認知實驗項目
學生對元件識別與檢測實驗不僅要學懂芯片、阻容等元件原理和用法,還要學會系統板、主控板和驅動板中各種電路作用和應用技巧。更應熟知元件的差異化特點,以便消除元件差異化對系統造成的影響。
電子器件焊接實驗主要以鍛煉學生動手能力為主,學會焊接工藝與技巧,懂得焊板質量檢查,掌握焊接布局與焊接次序。
車身元件實驗要使學生熟悉車架、車輪、減速器及電源等部件特點,關注機械零件制造偏差特征,知悉零件誤差對控制系統的影響,特別要學會電源測試和篩選方法,保證平衡車動力可靠性。
4 單元級拓展實驗
單元級拓展實驗主要是擴大學生知識面,學懂微處理器、傳感器、電機驅動等單元技術特點,這些單元性能決定著平衡車制作質量,做好單元測試實驗是制作平衡車基礎,也是保證平衡車控制性能的重要環節,具體單元級實驗項目見圖3。
微處理器單元實驗要求熟悉微處理器外部接口屬性,特別要掌握外部接口的靈活運用,要熟悉外部電路設計,學會濾波、防靜電等電路使用方法。
檢測單元實驗主要包括角度測量、速度測量和圖像測量。速度測量用編碼器脈沖輸入,測量誤差相對較小。圖像測量只有黑白兩色,灰度分辨也較容易。而陀螺儀角度測量存在累計誤差,加速度計角度測量抗干擾能力弱,使用單一角度測量元件很難獲得準確測量數據,這需要設計互補角度測量方案,并通過零位校準和角度標定實驗,驗證互補角度測量方案的準確性[8-9]。

圖3 單元級拓展實驗項目
電機驅動單元實驗有助于學生掌握H橋驅動電路,熟悉電機工作原理和調節特性,學會處理H橋電路開關管時序控制和電機死區問題。
平衡車裝配實驗關鍵是要以平衡車穩定和控制為核心,合理配置重心,準確安裝測量單元,以便確保平衡車性能。
5 系統級探索實驗
平衡車是復雜的控制系統,要從系統角度研究平衡車穩定性、準確性,平衡車技術不僅涉及數學、物理等知識,也涉及許多未學過的知識[10]。透過平衡車系統實驗的真實感受,能幫助學生認識理論和實踐的差異。系統實驗中蘊含的大量問題有助于提高學生的探索樂趣,有利于開辟學生的創新思維空間。
5.1 系統級探索實驗軟件實現
平衡車軟件采用微處理器軟件支持的C語言編程,主程序按功能劃分為初始化、中斷、角度控制、速度控制、方向控制及控制算法子程序,各部分軟件都要與硬件密切結合,具體軟件構成見圖4。
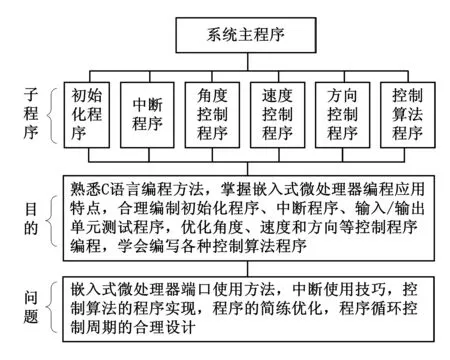
圖4 平衡車軟解構成
平衡車軟件肩負著硬件功能的全面實現,需要承擔數據采集、數據處理、控制運算、控制參數優化等任務,精煉的的程序設計,是實現平衡車性能的根基。學生通過軟件設計與編程訓練能學會微處理器端口應用技巧,熟悉嵌入式程序特點,知悉控制程序和計算機程序的差別,學會運用系統硬件規劃中斷程序和設計中斷周期,確保控制系統精度[11]。
5.2 探索級實驗項目
平衡車控制系統涵蓋多學科交叉技術,且系統比較復雜,系統級探索實驗是元件級和單元級實驗的升華,面臨的問題更多,需要思考的難點更明顯。探索性實驗將注重學生系統思想培養,著重呈現平衡車制作的各種問題,如檢測誤差、平衡及精度等,讓學生深刻體會實驗在創新活動中的重要地位,知曉什么是真正的能力,將學生引領到理論和實踐協調發展的軌道上,解決學生普遍存在的眼高手低現象[12]。具體系統級探索實驗項目見圖5。

圖5 系統級探索實驗項目
數學模型實驗要學會理論模型的簡化技巧和系統參數辨識方法,懂得實際模型和理論模型的差異機理,為系統控制打下堅實基礎[13]。
系統調試實驗主要注重角度和速度控制的穩定性問題,感受到為什么存在不穩定問題,不穩定機理是什么,如何解決不穩定問題,為什么零位平衡穩定性是穩定的關鍵,這些看似簡單的理論問題,實驗調試難度卻很大,由此引發學生對控制問題的好奇,引領學生走入探索思維模式,使學生在探索中發現問題,在精細中解決問題。
軌跡運行實驗更注重平衡車運行的平穩性、轉彎靈活性等整體運行效果,解決平衡車連續運行問題,重視角度、速度及圖像檢測的準確性,將控制性能由粗獷走向細化。
5.3 系統級挑戰實驗
設計系統級挑戰實驗更注重平衡車的產品化屬性,讓學生感到實驗室研究成功并不一定是合格產品,用戶接受的產品才是合格產品,產品優劣需要更復雜的應用環境檢驗。設計平衡車隨機軌跡、滑動路面、顛簸路況及凸凹路況挑戰性實驗就是要檢驗平衡車的產品化性能,使學生知曉產品研究的重要性。具體系統級挑戰實驗項目見圖6。
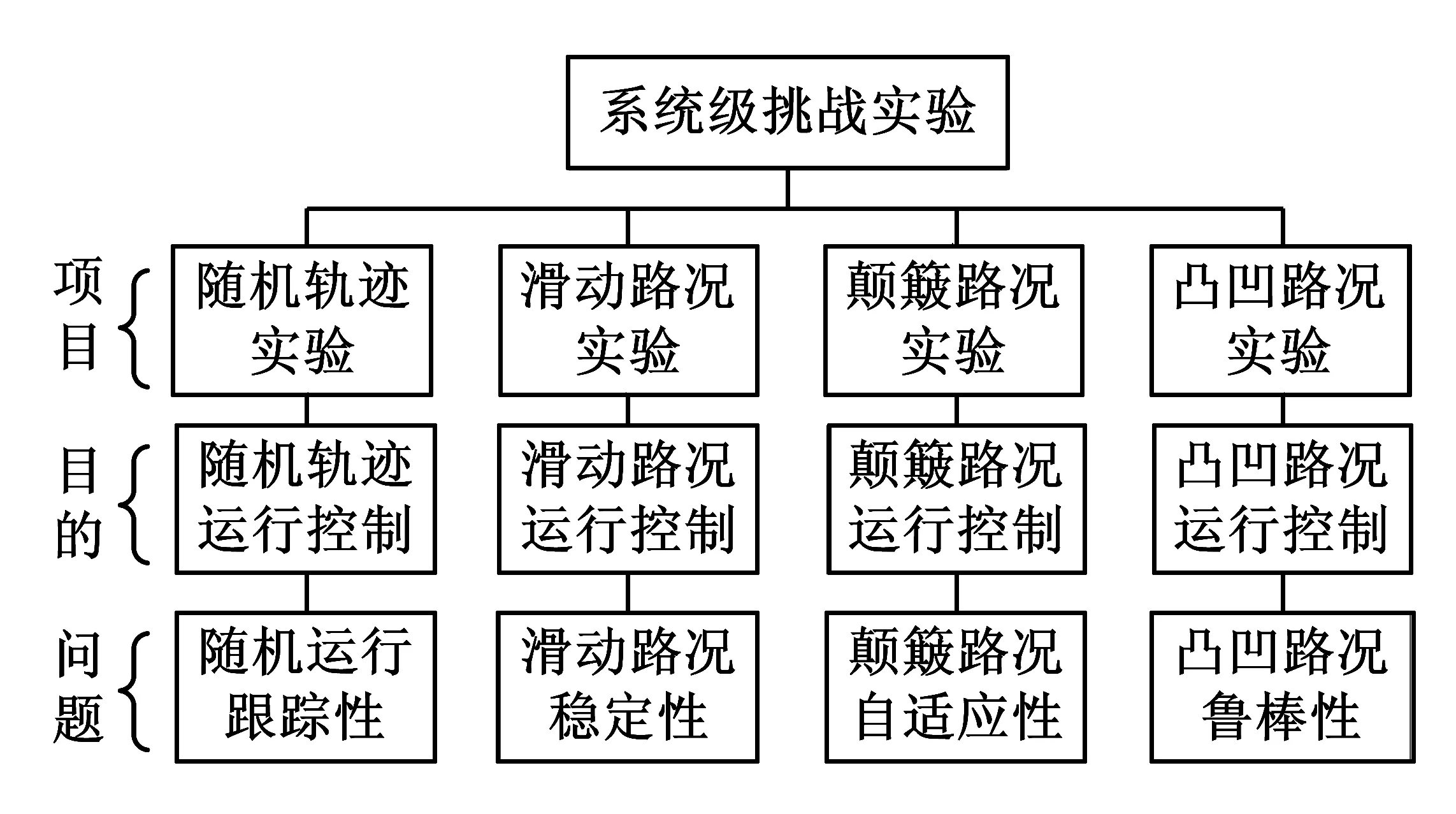
圖6 系統級挑戰實驗項目
隨機軌跡實驗將著重解決大角度轉彎的穩定平衡控制問題,滑動路面實驗更關注平衡能力問題,顛簸路況實驗將檢驗適應性問題,凸凹路況實驗會更看中魯棒問題,這需要解決更復雜控制問題[14],這些難點問題更容易激發學生的研究興趣。
6 平衡車創新教學成效
經過多年教學積累,已形成比較完整的平衡車創新實驗,從學生創新實驗對象選題熱情和評教結果來看,平衡車教學設計適合學生的創新需求,實驗內容既有廣度也有深度。許多學生在課程結束后仍然找教師共同討論問題,說明學生的問題式思考模式正在逐步建立,“問題式”教學方法獲得認可。圖7是學生創新實驗課制作的部分平衡車。

圖7 學生創新實驗課制作的部分平衡車
7 結語
以我校創新實驗課人才培養教學目標為指引,設計了平衡車創新實驗課教學內容,依據平衡車具有的多變量、非線性、強耦合特點,將教學內容設計為元件級、單元級及系統級3個層次,實驗難度從認知到挑戰逐步攀升,元件級認知實驗主要關注基礎能力訓練,單元級拓展實驗重點放在擴大知識面,系統級探索實驗注重軟硬件綜合應用,系統級挑戰實驗更強調創新能力。
另外,詳細介紹了各層次實驗項目的核心問題和實驗目的,從問題角度闡述了“問題式”教學的重要性。學生平衡車實物制作所遇到的大量技術問題,即能培養獨立思考,也能鍛煉創新思維。經過多年平衡車創新實驗教學積累,其教學內容設計合理,“問題式”教學方法取得了顯著效果。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
