基于ADAMS及ANSYS的低壓開關(guān)操作機(jī)構(gòu)優(yōu)化研究
2018-10-09 07:05:54趙向杰
機(jī)電工程 2018年9期
趙向杰
(西安航空職業(yè)技術(shù)學(xué)院 航空制造工程中心,陜西 西安 710089)
0 引 言
旋轉(zhuǎn)手柄是低壓開關(guān)常用的一種輔助操作機(jī)構(gòu),可在開關(guān)柜柜門上操作安裝在開關(guān)柜內(nèi)的斷路器,作為手動助力機(jī)構(gòu),方便使用者輕松控制開關(guān)分合閘。其防護(hù)等級為IP56,能起到一定的隔離作用。同時(shí)通過內(nèi)置在轉(zhuǎn)軸內(nèi)的鎖定功能,它可以在斷路器處于合閘或脫扣位置時(shí)禁止打開柜門[1],以防止施工人員誤操作而引起觸電事故。為保證用電安全,旋轉(zhuǎn)手柄操作機(jī)構(gòu)必須保證開關(guān)的可靠分、合閘。但是由于大電流等級的工業(yè)用開關(guān)其合閘與分閘操作時(shí)的機(jī)構(gòu)阻力較大,這就對旋轉(zhuǎn)手柄內(nèi)部零件的疲勞強(qiáng)度提出了較高的要求。
為較為準(zhǔn)確地計(jì)算零件的疲勞強(qiáng)度,本文將利用ADAMS和ANSYS軟件進(jìn)行聯(lián)合仿真,建立旋轉(zhuǎn)手柄操作機(jī)構(gòu)的剛?cè)狁詈咸摂M樣機(jī)模型,分析關(guān)鍵零件在不同約束條件下的受力情況,得到零件內(nèi)部不同位置的應(yīng)力變化曲線,結(jié)合這些數(shù)據(jù)對零件疲勞強(qiáng)度進(jìn)行計(jì)算,同時(shí)通過機(jī)械壽命試驗(yàn)對設(shè)計(jì)結(jié)果進(jìn)行驗(yàn)證。
1 機(jī)構(gòu)工作原理
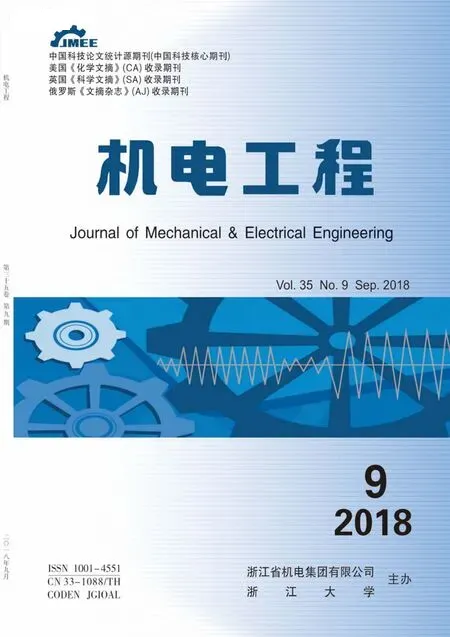
操作機(jī)構(gòu)的結(jié)構(gòu)設(shè)計(jì)要求轉(zhuǎn)柄的輸入行程角與轉(zhuǎn)盤的輸出行程角相等且為90°,同時(shí)當(dāng)在轉(zhuǎn)柄上施加6 N·M的轉(zhuǎn)矩時(shí),轉(zhuǎn)盤需輸出6 N·M的扭矩。操作機(jī)構(gòu)結(jié)構(gòu)簡圖如圖1所示。
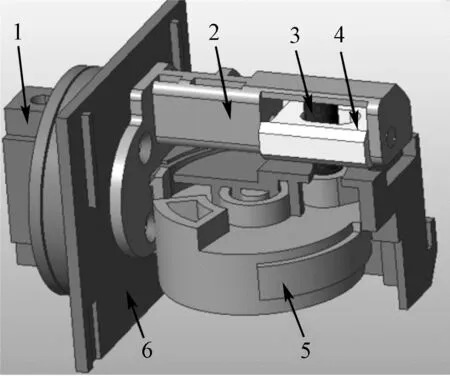
圖1 操作機(jī)構(gòu)結(jié)構(gòu)簡圖1-轉(zhuǎn)柄;2-轉(zhuǎn)臂;3-推桿;4-導(dǎo)向塊;5-轉(zhuǎn)盤;6-機(jī)座
該方案是通過操縱轉(zhuǎn)柄2帶動與其固聯(lián)在一起的轉(zhuǎn)臂3轉(zhuǎn)動,再通過鉸接在轉(zhuǎn)臂上的導(dǎo)向塊5推動推桿4,從而驅(qū)動轉(zhuǎn)盤6轉(zhuǎn)動。相較于老產(chǎn)品上采用的錐齒輪傳動方案,該設(shè)計(jì)具有體積更小,傳動結(jié)構(gòu)簡單[2],機(jī)械效率高,機(jī)構(gòu)運(yùn)動精度高且能實(shí)現(xiàn)反向自鎖的優(yōu)點(diǎn)。
本研究以上述方案為原型制作了實(shí)體樣機(jī),并對其進(jìn)行了操作實(shí)驗(yàn),結(jié)果如圖2所示。
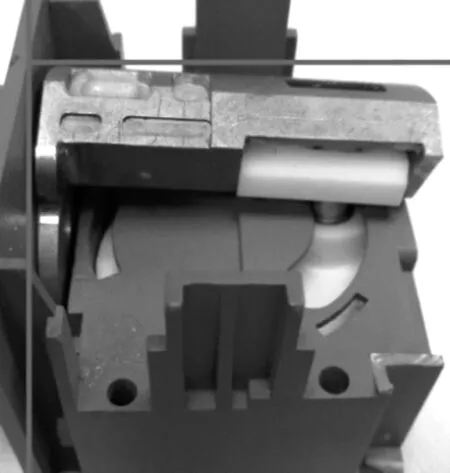
圖2 方案一樣品變形圖示
根據(jù)設(shè)計(jì)要求,機(jī)構(gòu)的輸入、輸出轉(zhuǎn)矩都是6 N·M,制樣時(shí)除轉(zhuǎn)臂3及推桿4選用45#鋼外,其余零件均為塑料材質(zhì)。實(shí)驗(yàn)結(jié)果可看出:轉(zhuǎn)臂3發(fā)生了較明顯的變形,需要對其結(jié)構(gòu)設(shè)計(jì)做出改進(jìn)和優(yōu)化[3]。
2 機(jī)構(gòu)分析
轉(zhuǎn)臂在運(yùn)動過程中承受彎矩與扭矩的組合作用,需具備較高的強(qiáng)度和剛度[4]。由于零件幾何形狀不規(guī)則且結(jié)構(gòu)特征較復(fù)雜,手工計(jì)算該零件在受載情況下的應(yīng)力和變形較為困難[5]。因此本研究借助ADAMS軟件對整個(gè)操作機(jī)構(gòu)進(jìn)行多剛體動力學(xué)仿真,仿真結(jié)果如圖3所示。
圖3 旋轉(zhuǎn)手柄的動力學(xué)仿真
據(jù)此可得到轉(zhuǎn)臂各個(gè)轉(zhuǎn)動副處的約束反力。本研究取其中的峰值作為邊界條件,在ANSYS[6]中建立轉(zhuǎn)臂的有限元模型,進(jìn)行瞬態(tài)動力學(xué)求解,其結(jié)果圖4所示。
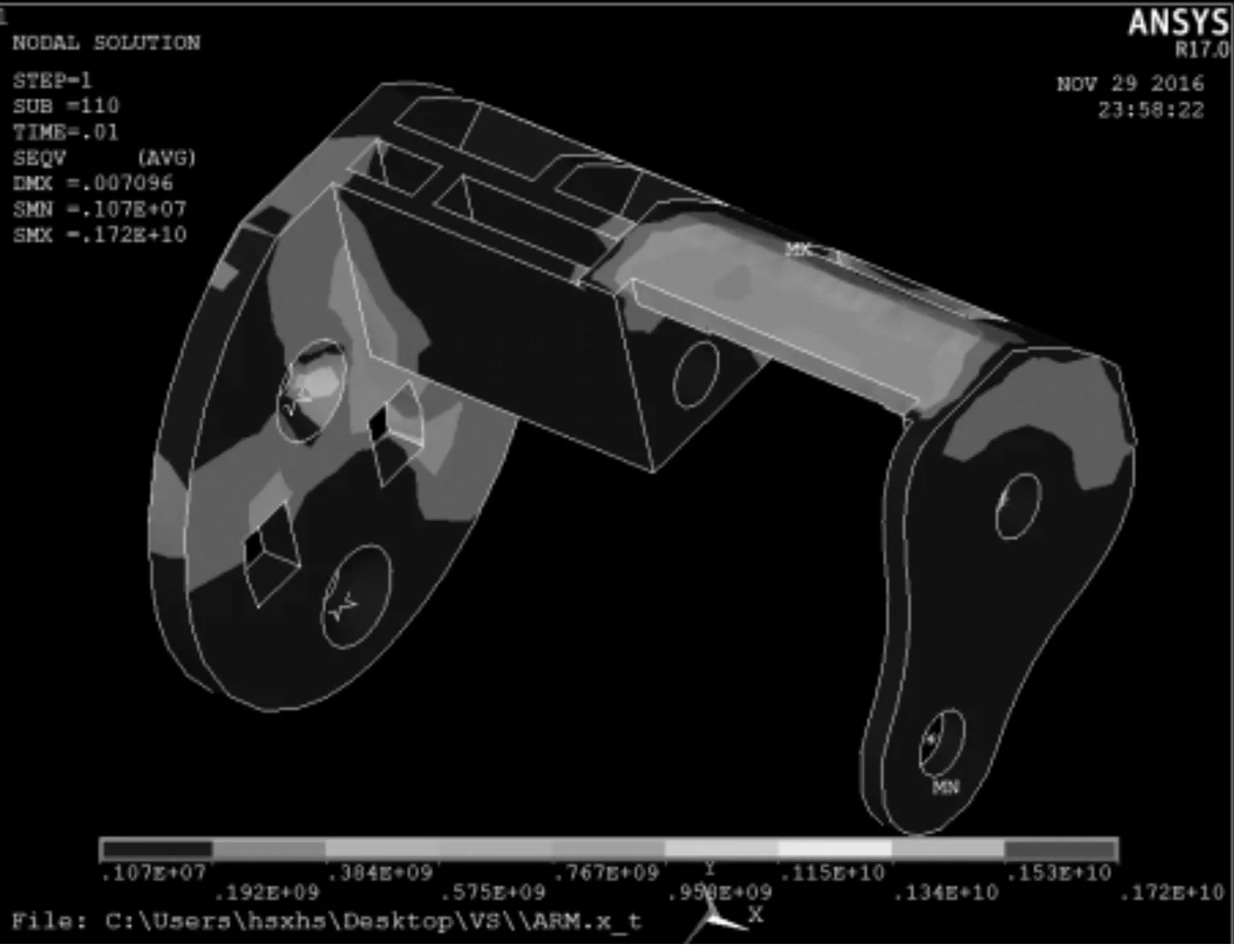
圖4 瞬態(tài)動力學(xué)分析結(jié)果
最后本研究依據(jù)仿真的應(yīng)力云圖對搖臂結(jié)構(gòu)進(jìn)行加強(qiáng)。由計(jì)算結(jié)果可看出:該轉(zhuǎn)臂在承載時(shí)的應(yīng)力集中區(qū)域?yàn)檗D(zhuǎn)臂固定端與懸臂部分的交界面以及右端為避免與導(dǎo)向塊干涉而去料的薄壁部分。考察零件的整體受力情況,為改善轉(zhuǎn)臂的剛度,減小受力后構(gòu)件的變形和分布壓力與磨損且不影響構(gòu)件間的相對運(yùn)動關(guān)系,可考慮在機(jī)構(gòu)中引入虛約束,具體實(shí)現(xiàn)形式是給零件懸臂一側(cè)增加支撐鉸鏈,轉(zhuǎn)臂新舊方案對比如圖5所示(該鉸鏈的轉(zhuǎn)動軸線與整個(gè)轉(zhuǎn)臂的轉(zhuǎn)動軸線重合)。

圖5 轉(zhuǎn)臂新舊方案對比
本研究對機(jī)構(gòu)進(jìn)行自由度分析,該機(jī)構(gòu)由6個(gè)零件組成,除機(jī)座外共有活動零件5個(gè),該機(jī)構(gòu)屬于空間機(jī)構(gòu),機(jī)構(gòu)間各零件連接關(guān)系如圖6所示。
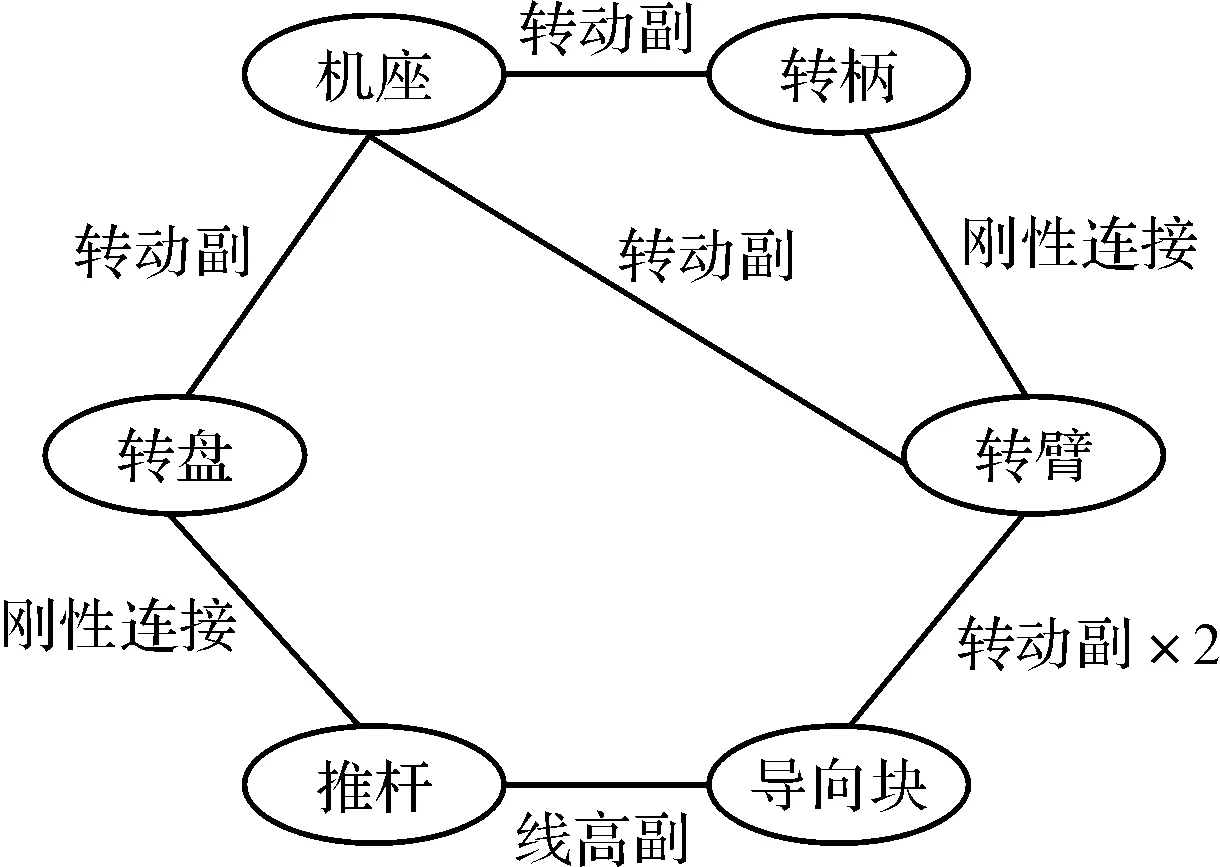
圖6 機(jī)構(gòu)連接關(guān)系圖
轉(zhuǎn)臂結(jié)構(gòu)更改后,機(jī)構(gòu)中有兩個(gè)位置存在虛約束,分別是導(dǎo)向塊與轉(zhuǎn)臂的連接處以及轉(zhuǎn)臂與機(jī)座的連接處。導(dǎo)向塊與轉(zhuǎn)臂間使用兩個(gè)轉(zhuǎn)動副連接,且轉(zhuǎn)動軸線重合,所以可算作一個(gè)運(yùn)動副。轉(zhuǎn)臂與手柄間、推桿與轉(zhuǎn)盤之間都是剛性連接,因此均可視為一個(gè)運(yùn)動構(gòu)件。除機(jī)座外共有3個(gè)運(yùn)動構(gòu)件,則該機(jī)構(gòu)的自由度為:
F=3×6-(5-2)×5-2×1=1
由計(jì)算結(jié)果可知,只需在轉(zhuǎn)柄端施加轉(zhuǎn)矩機(jī)構(gòu)就能實(shí)現(xiàn)確定的機(jī)械運(yùn)動,符合原設(shè)計(jì)意圖。
3 疲勞強(qiáng)度設(shè)計(jì)
為保證產(chǎn)品的使用壽命要求,僅考慮靜強(qiáng)度及在工況動載荷作用下的強(qiáng)度條件是不夠的,還需對其進(jìn)行疲勞強(qiáng)度校核。
該機(jī)構(gòu)的設(shè)計(jì)要求的操作壽命N=2.5×104,屬于高周疲勞范圍,由于該轉(zhuǎn)臂的材料擬定為調(diào)質(zhì)后的45號鋼,取其材料循環(huán)基數(shù)N0=107。因零件在承載運(yùn)行時(shí)的循環(huán)特性值r未知,無法確定材料的持久疲勞極限值σr∞,從而無法計(jì)算零件在循環(huán)次數(shù)N=2.5×104時(shí)對應(yīng)的的疲勞極限σrN。為得到轉(zhuǎn)臂承在外力作用下的應(yīng)力循環(huán)特性值r,需要準(zhǔn)確分析零件內(nèi)部各點(diǎn)處應(yīng)力隨時(shí)間的變化關(guān)系。借助ADAMS與ANSYS的剛?cè)狁詈戏抡婵梢暂^準(zhǔn)確地計(jì)算該零件內(nèi)部復(fù)雜的應(yīng)力狀態(tài),繼而計(jì)算出循環(huán)特性值。
本研究利用ADAMS/View Flex模塊進(jìn)行剛?cè)狁詈戏抡嫘枰冉⑷嵝泽w[7],選用在ANSYS中建立好MNF模態(tài)中性文件再調(diào)入動力學(xué)仿真環(huán)境的方式完成。合理建立柔性體文件需要對零件進(jìn)行受力分析,在其有限元模型上建立恰當(dāng)?shù)耐饴?lián)節(jié)點(diǎn)以便于在動力學(xué)環(huán)境中施加約束。本研究取各轉(zhuǎn)動副中心及轉(zhuǎn)臂左端面圓的圓心為外聯(lián)節(jié)點(diǎn),將其與周圍零件特征面上的節(jié)點(diǎn)自由度耦合后生成剛性區(qū)域,作為動力學(xué)仿真時(shí)的施力點(diǎn),如圖7所示。
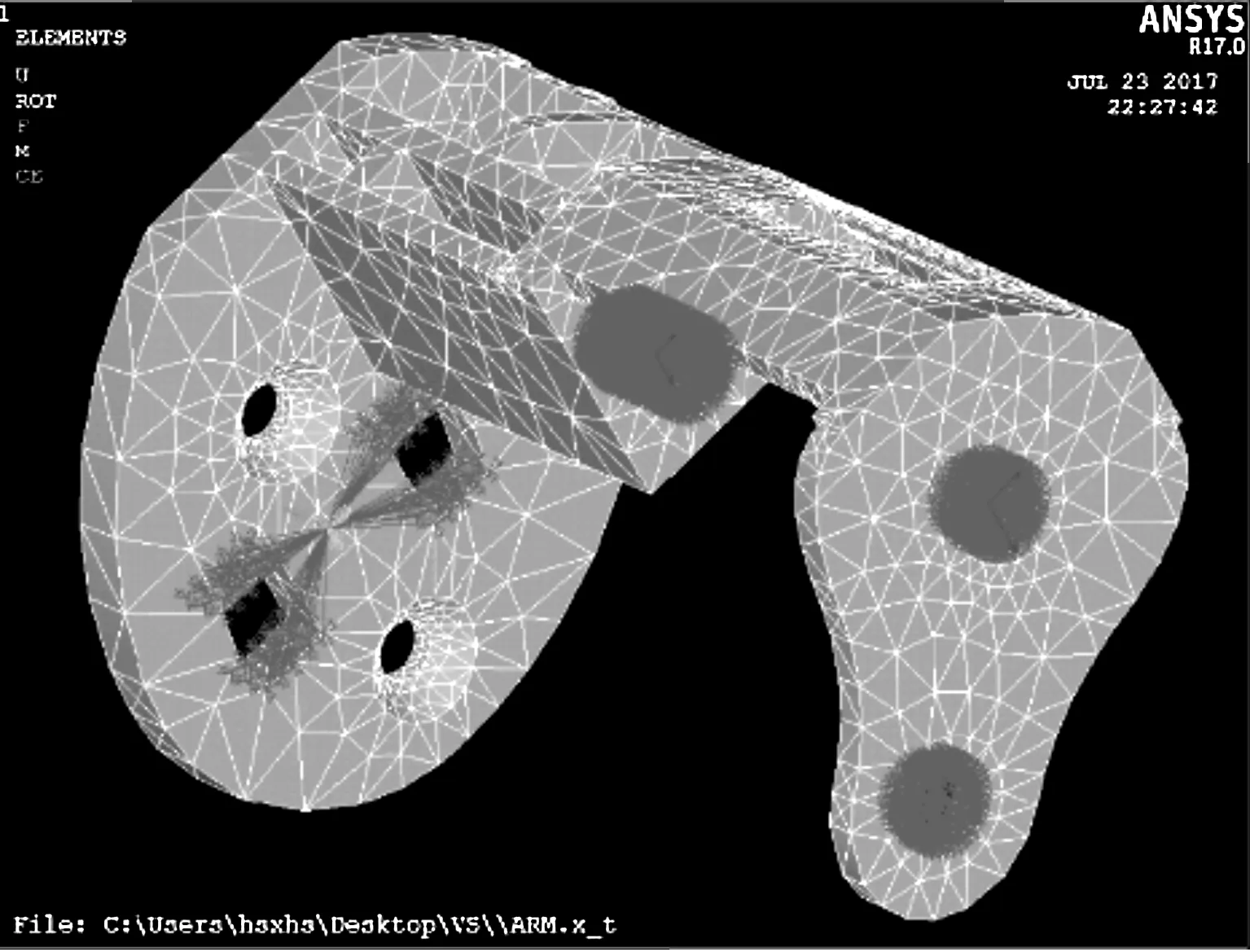
圖7 采用剛性區(qū)域法生成的模態(tài)中性文件
最后本研究利用ANSYS環(huán)境生成MNF文件[8],其中包含節(jié)點(diǎn)20 707個(gè),包含外連節(jié)點(diǎn)4個(gè),抽取的模態(tài)階數(shù)為45。
機(jī)構(gòu)動作過程中,轉(zhuǎn)臂所承受的外力通過運(yùn)動副間的接觸施加在該零件上。為全面了解邊界條件的改動對零件強(qiáng)度的影響,對添加轉(zhuǎn)臂與機(jī)座間虛約束轉(zhuǎn)動副前后兩種情況分別做了分析,轉(zhuǎn)臂上其余運(yùn)動副處受力情況是結(jié)構(gòu)優(yōu)化的關(guān)鍵。本文利用ADAMS/View Flex模塊建立轉(zhuǎn)接機(jī)構(gòu)的剛?cè)狁詈夏P蚚9-11],按照實(shí)驗(yàn)條件添加載荷及約束,考查轉(zhuǎn)臂在運(yùn)動過程中在外載作用下的受力和變形情況。本文為方便解析將鉸鏈處約束反力分解為Z軸方向分力和Y軸方向分力考察,不同約束情況下各分力變化曲線如圖8所示。
由仿真結(jié)果可知:轉(zhuǎn)臂支腳移除前后其余運(yùn)動副受力情況差別較大,為能更加準(zhǔn)確地估算該零件的疲勞壽命需要關(guān)注轉(zhuǎn)臂運(yùn)動過程中其內(nèi)部的應(yīng)力分布及變化情況。筆者提取柔性體內(nèi)部點(diǎn)的應(yīng)力數(shù)據(jù)[12],此處按照應(yīng)力值由高到低的順序提取前40個(gè)節(jié)點(diǎn)的數(shù)據(jù),如圖9所示。
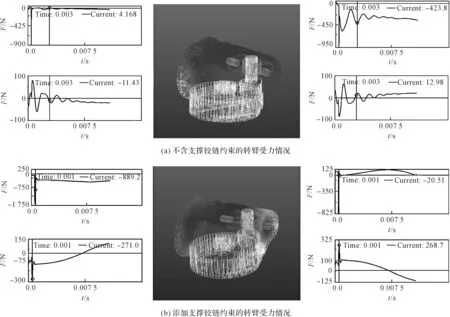
圖8 剛?cè)狁詈戏抡?/p>
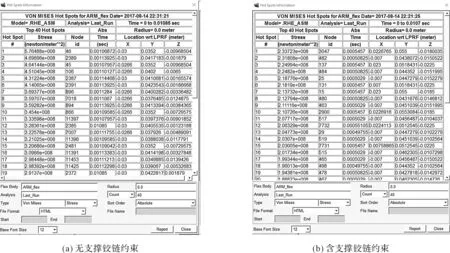
圖9 轉(zhuǎn)臂內(nèi)部節(jié)點(diǎn)應(yīng)力分布情況
分析節(jié)點(diǎn)應(yīng)力數(shù)據(jù)可知:添加虛約束前后轉(zhuǎn)臂內(nèi)部各點(diǎn)處的應(yīng)力狀態(tài)變化很大,零件內(nèi)部產(chǎn)生的最大應(yīng)力減小了一半。按照第四強(qiáng)度理論,當(dāng)零件內(nèi)部的Von Mises應(yīng)力值達(dá)到許用應(yīng)力值時(shí)即發(fā)生塑性變形,而此處的許用應(yīng)力值應(yīng)取零件的疲勞極限。取等效應(yīng)力值大小靠前的5個(gè)節(jié)點(diǎn)研究其應(yīng)力循環(huán)特性,轉(zhuǎn)臂內(nèi)部各節(jié)點(diǎn)應(yīng)力隨時(shí)間變化情況如圖10所示。
由圖10可知:在鉸鏈添加前所考察的各個(gè)節(jié)點(diǎn)的應(yīng)力狀態(tài)均為不穩(wěn)定循環(huán)變應(yīng)力,而添加了鉸鏈之后各節(jié)點(diǎn)的應(yīng)力循環(huán)特性值r≈-1。
材料疲勞極限與強(qiáng)度關(guān)系經(jīng)驗(yàn)公式如表1所示。

圖10 轉(zhuǎn)臂內(nèi)部各節(jié)點(diǎn)應(yīng)力隨時(shí)間變化情況
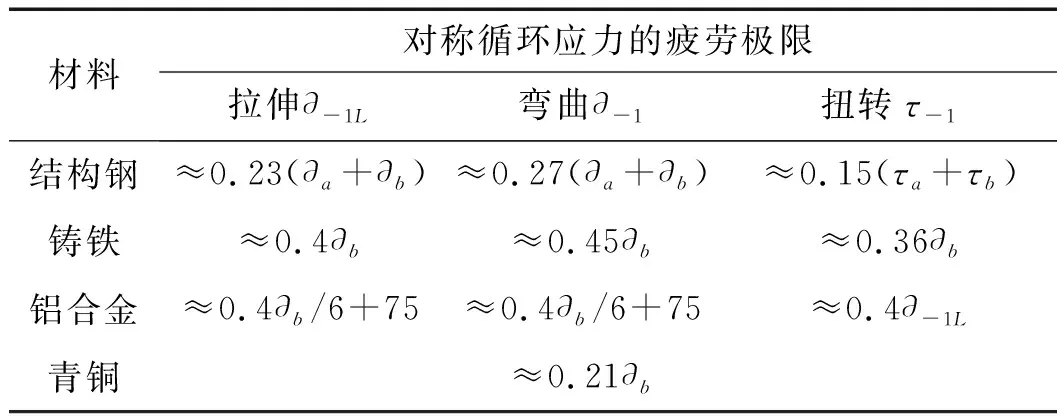
材料對稱循環(huán)應(yīng)力的疲勞極限拉伸?-1L彎曲?-1扭轉(zhuǎn)τ-1結(jié)構(gòu)鋼≈0.23(?a+?b)≈0.27(?a+?b)≈0.15(τa+τb)鑄鐵≈0.4?b≈0.45?b≈0.36?b鋁合金≈0.4?b/6+75≈0.4?b/6+75≈0.4?-1L青銅≈0.21?b
近似可求得材料在該工況下的疲勞極限σ-1=0.27(σs+σb)=411.9 MPa。對比圖10中兩種工況下的仿真結(jié)果可看出:原方案缺少虛約束鉸鏈時(shí)其多個(gè)節(jié)點(diǎn)處的應(yīng)力超過疲勞極限,而添加鉸鏈后零件內(nèi)部各節(jié)點(diǎn)處的應(yīng)力值整體下降了一半且變化趨于平穩(wěn),滿足設(shè)計(jì)所需的疲勞強(qiáng)度要求。基于上述分析結(jié)果,本研究按照新設(shè)計(jì)方案重新制作了樣機(jī)并進(jìn)行了機(jī)械壽命試驗(yàn),結(jié)果如圖11所示(樣機(jī)在完成25 000次操作后未見任何變形)。

圖11 機(jī)械壽命試驗(yàn)
4 結(jié)束語
本文首先通過研究虛約束對機(jī)構(gòu)零件受力情況的影響以及分析在不同約束條件下零件的應(yīng)力特性,對零件結(jié)構(gòu)進(jìn)行了優(yōu)化;其次為較準(zhǔn)確地計(jì)算零件的疲勞強(qiáng)度[13],利用ANSYS建立了關(guān)鍵零件的模態(tài)中性文件,在ADAMS/View Flex的剛?cè)狁詈檄h(huán)境中進(jìn)行了動力學(xué)仿真,得到關(guān)鍵零件在運(yùn)動過程中內(nèi)部各節(jié)點(diǎn)的應(yīng)力變化曲線,作為應(yīng)力應(yīng)變法計(jì)算疲勞強(qiáng)度的輸入數(shù)據(jù),計(jì)算了零件的疲勞極限;最后以該設(shè)計(jì)方案制作了樣機(jī),對其進(jìn)行了機(jī)械壽命實(shí)驗(yàn)。
實(shí)驗(yàn)結(jié)果表明其滿足25 000次操作壽命要求,從一定程度上說明了設(shè)計(jì)計(jì)算及剛?cè)狁詈戏治鰯?shù)據(jù)的可靠性。