風(fēng)電塔筒爬壁機器人吸附結(jié)構(gòu)設(shè)計分析*
2018-10-09 07:59:50侯嘉瑞孫立新
機電工程 2018年9期
關(guān)鍵詞:分析
侯嘉瑞,萬 熠*,孫立新
(1.山東大學(xué) 機械工程學(xué)院 高效潔凈機械制造教育部重點實驗室,山東 濟南 250061;2.河北工業(yè)大學(xué) 機械工程學(xué)院,天津 300132)
0 引 言
目前,風(fēng)力發(fā)電已在世界各地廣為應(yīng)用。作為風(fēng)能收集的載體—風(fēng)電塔筒而言,由于制造、裝配等過程存在的問題,以及長時間使用后塔筒疲勞,容易出現(xiàn)塔筒裂紋、表面銹蝕等狀況,不及時實施對應(yīng)的檢修措施將會引發(fā)塔筒坍毀的嚴(yán)重事故[1-2]。
目前常見的人工檢修法存在諸多弊端:(1)檢修人員需要攜帶大量工具從高度極高的塔筒內(nèi)攀爬到頂部;(2)檢修人員懸吊在塔筒外壁工作時,由于高空風(fēng)力較大,極易出現(xiàn)晃動,威脅檢修人員的安全;(3)由于塔筒外表面面積較大,人工檢修的方式容易出現(xiàn)漏檢的情況,對于一些裂縫、銹蝕得不到完全檢修,存在后續(xù)的安全隱患[3-4]。
針對上述問題,本文將設(shè)計一種能夠替代人力進行風(fēng)電塔筒檢修的輔助工具。
1 爬壁機器人結(jié)構(gòu)方案設(shè)計
1.1 整體方案布局
設(shè)計風(fēng)電塔筒爬壁機器人目的是為了能替代人工進行對風(fēng)電塔筒的檢修,因此要求爬壁機器人能夠安裝不同檢修裝置,并通過在工作表面進行運動,完成檢修任務(wù)。
綜合現(xiàn)有研究成果及生產(chǎn)需求[5-6],要求爬壁機器人能夠達到的基本技術(shù)指標(biāo)如表1所示。
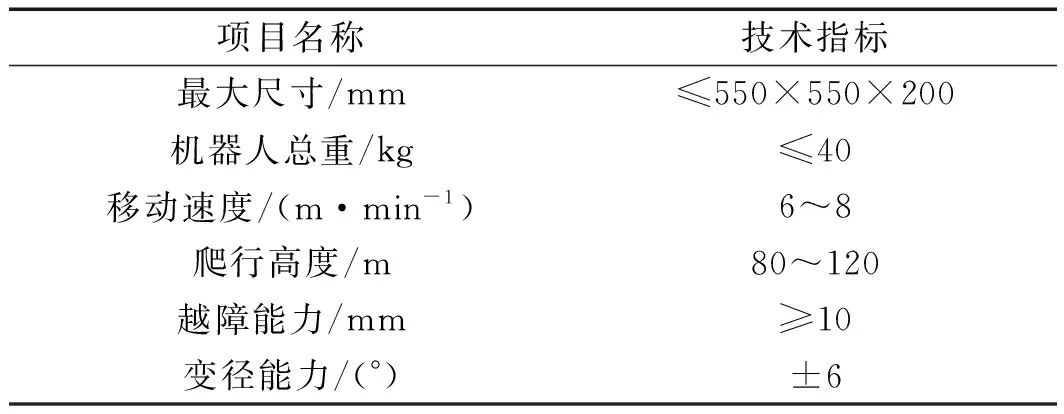
表1 爬壁機器人性能指標(biāo)
同時,考慮應(yīng)用場景,該爬壁機器人應(yīng)由以下功能部分組成,其主要功能分解圖如圖1所示。
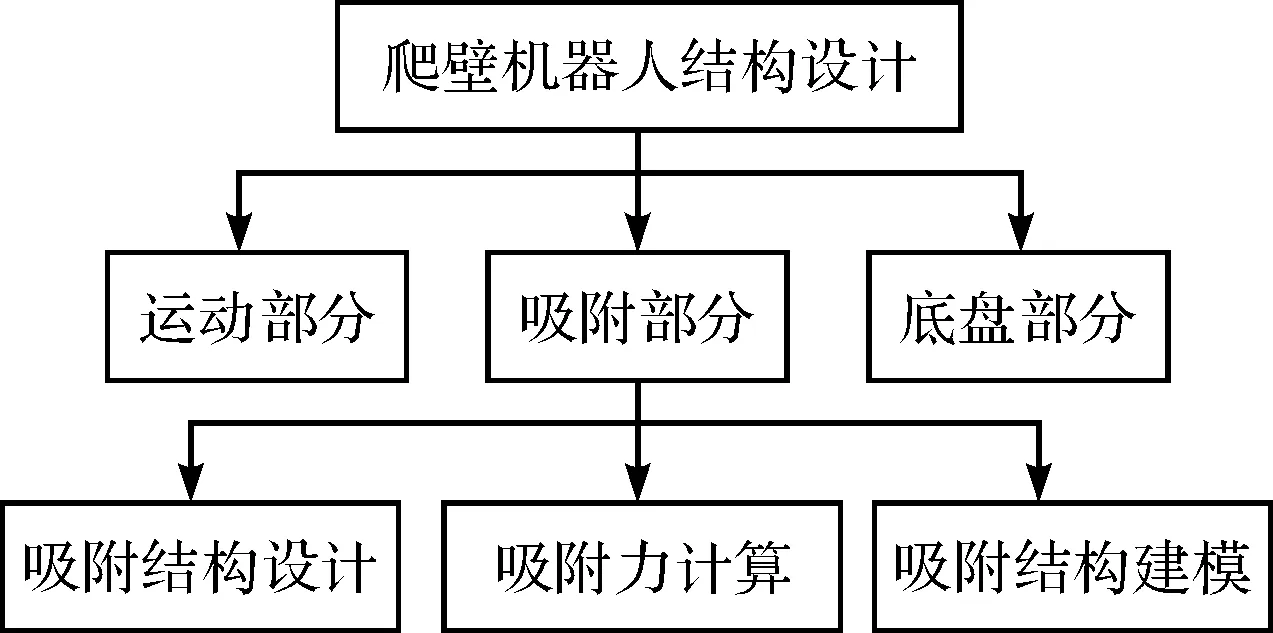
圖1 爬壁機器人主要功能分解圖
常見爬壁機器人吸附方式分為:負壓吸附、真空吸附、以及磁吸附[7],以上3種吸附方式優(yōu)缺點如表2所示[8]。
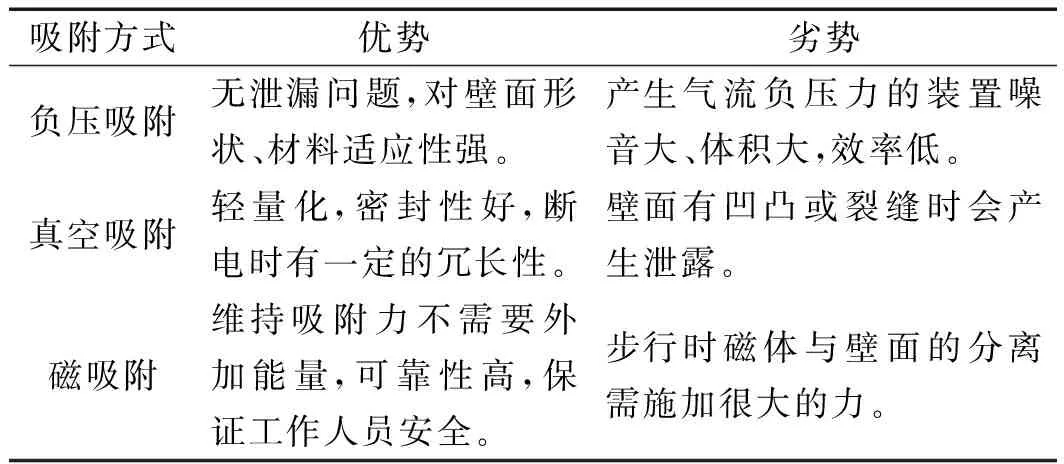
表2 常見爬壁機器人吸附方式
根據(jù)爬壁機器人應(yīng)用場景,磁吸附結(jié)構(gòu)對于運動表面的材料要求較高,需要為能被吸附的磁性材料;同時這種方式設(shè)計簡單,相對其他吸附方式而言吸附力明顯較大,對運動面形狀要求不高。
磁吸附包括永磁體和電磁體兩種吸附方式,前者結(jié)構(gòu)簡單、可靠性高。使用永磁吸附的設(shè)備,不會因斷電等意外情況出現(xiàn)吸附力的消失,導(dǎo)致設(shè)備從工作面墜落[9],因此設(shè)計采用永磁吸附方式。
考慮風(fēng)電塔筒塔筒曲率半徑不斷變化的特點,以及需要較大的吸附力等因素,爬壁機器人采用履帶式行走方式,通過兩臺驅(qū)動電機驅(qū)動狀態(tài)的不同,實現(xiàn)爬壁機器人直線及轉(zhuǎn)彎運動[10-11]。
1.2 旋轉(zhuǎn)吸附機構(gòu)模型的建立
由于風(fēng)電塔筒外壁面曲率是變化的,不同高度直徑不同,常見風(fēng)電塔筒高約80 m,塔筒整體呈錐形,最窄端口直徑2 800 mm,最寬端口直徑3 500 mm,若考慮爬壁機器人最大設(shè)計尺寸,采用雙鉸鏈旋轉(zhuǎn)結(jié)構(gòu)[12],則極端爬行位置沿塔筒切線方向貼合偏移約7.24°。根據(jù)風(fēng)電塔筒高度、直徑等參數(shù)計算,可得到爬壁機器人沿塔筒軸線方向貼合偏移約0.2°,該方向偏移可忽略不計。
因此,沿塔筒切線方向,爬壁機器人需要具備在一定范圍內(nèi)實現(xiàn)吸附半徑變化的能力。考慮機器人在塔筒外壁轉(zhuǎn)彎時,存在前端吸附結(jié)構(gòu)翹起,并遠離塔筒的情況,應(yīng)減小吸附機構(gòu)與塔筒的距離變化,要求機器人吸附結(jié)構(gòu)具備旋轉(zhuǎn)自由度。
根據(jù)以上分析結(jié)果,爬壁機器人需要具備兩個旋轉(zhuǎn)自由度。旋轉(zhuǎn)吸附機構(gòu)模型如圖2所示。
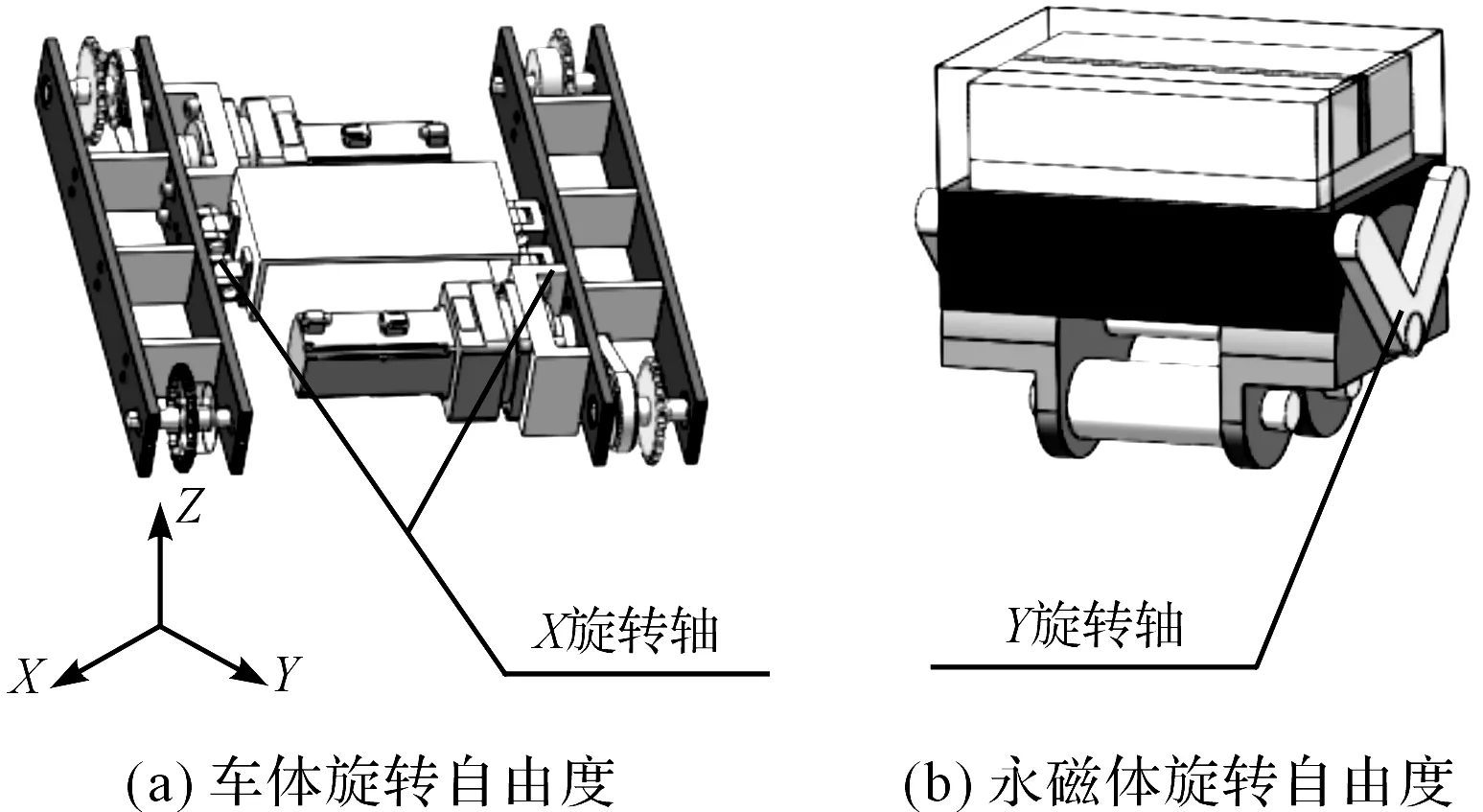
圖2 兩自由度旋轉(zhuǎn)吸附機構(gòu)模型
2 爬壁機器人吸附狀態(tài)受力分析
本文主要設(shè)計爬壁機器人吸附機構(gòu),因此在進行受力分析時主要進行靜力學(xué)分析,從吸附結(jié)構(gòu)的穩(wěn)定吸附方面進行分析。在靜止吸附狀態(tài)下,造成爬壁機器人失穩(wěn)的方式主要包括滑移下落、縱向翻轉(zhuǎn)以及橫向翻轉(zhuǎn)[13]。
2.1 滑移下落
假設(shè)爬壁機器人靜止,且吸附力是均勻的,則爬壁機器人靜力學(xué)受力分析如圖3所示。
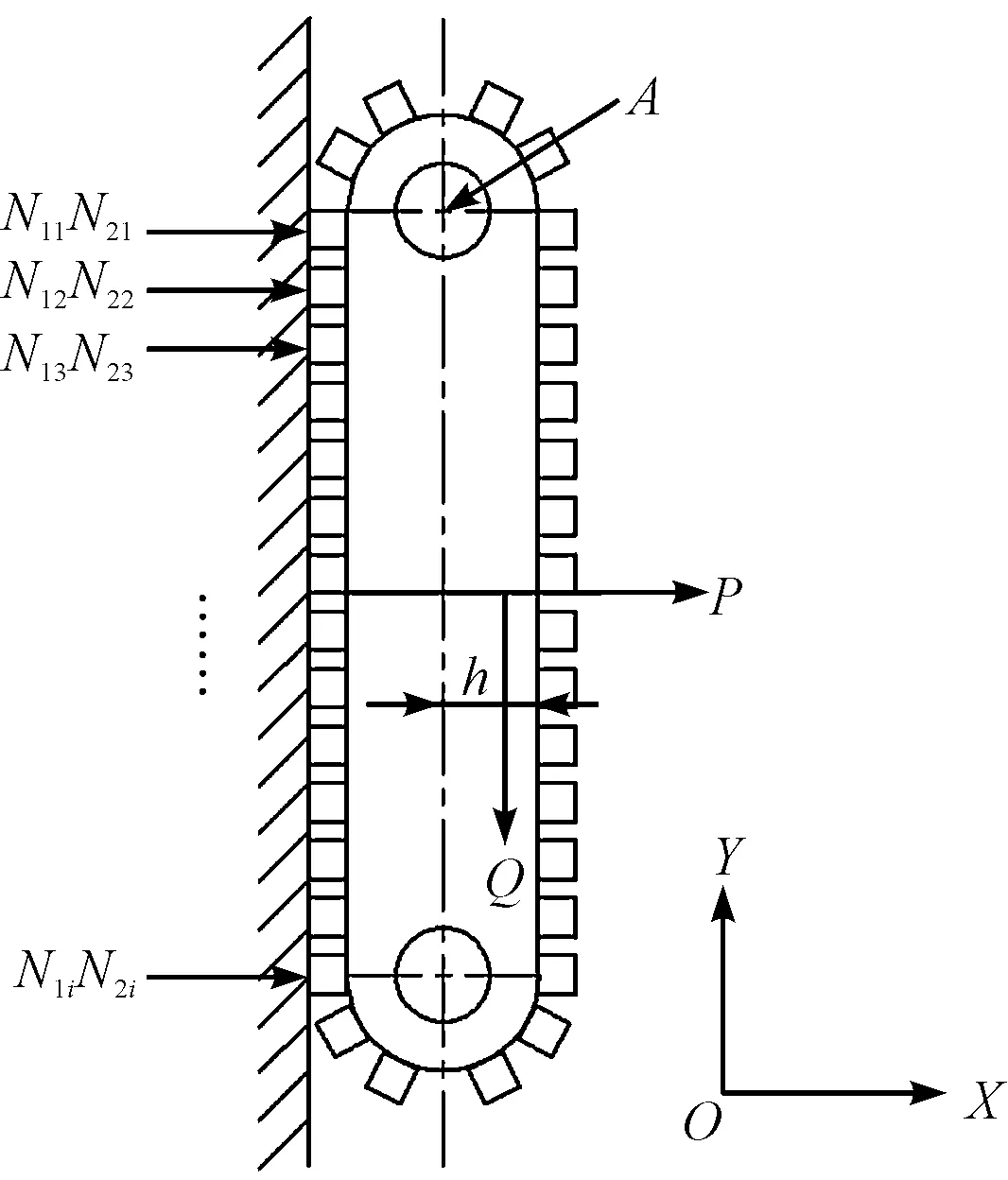
圖3 爬壁機器人縱向吸附受力分析圖N1iN2i-兩條履帶各永磁體與壁面作用力;P-永磁吸附裝置在墻壁上提供的吸力;Q-爬壁機器人總重;h-爬壁機器人重力偏移軸線距離;A-爬壁機器人縱向翻轉(zhuǎn)極限點
則根據(jù)受力分析可得:
(1)
(2)
F1i≤f靜·N1i
(3)
F2i≤f靜·N2i
(4)
式中:n—單條履帶與壁面同時吸附的永磁體數(shù)量;f靜—靜摩擦系數(shù)。
假設(shè)各永磁體吸附力均相同,則可令:
N11=N12=…=N1i=N1
(5)
N21=N22=…=N2i=N2
(6)
由公式(1~4)可得出:
nN1·f靜+nN2·f靜≥Q
(7)
且N1=N2,則可得:
2nN1·f靜≥Q2i
(8)
式中:N1—滑移失穩(wěn)極限狀態(tài)下單個永磁體吸附力。
得到結(jié)果:
(9)
2.2 縱向傾覆
爬壁機器人本體不發(fā)生縱向傾覆(即爬壁機器人在縱向靜止吸附狀態(tài)下不脫離墻壁)的條件為:∑MA≥0(各參數(shù)如圖3所示),通過計算可得:
2×(N×0+N×p′+N×2p′+
…+N×n-1p′)-Q·L≥0
(10)
(11)
(12)
式中:N2—縱向傾覆失穩(wěn)極限狀態(tài)下單個永磁體吸附力。
2.3 橫向傾覆
爬壁機器人本體不發(fā)生橫向傾覆(即爬壁機器人在橫向靜止吸附狀態(tài)下,不會出現(xiàn)脫離墻壁的情況)的條件為:∑MB≥0。
受力分析如圖4所示。
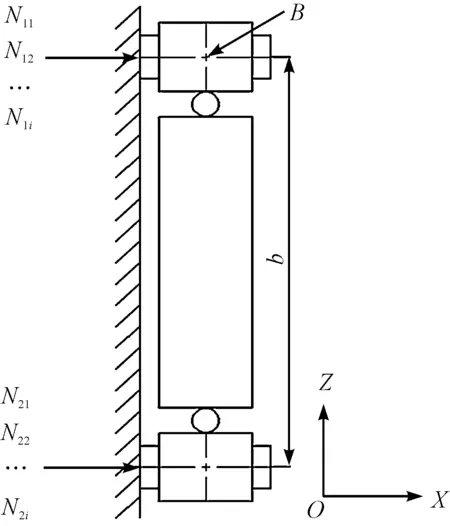
圖4 爬壁機器人橫向吸附受力分析圖N1iN2i-單條履帶各永磁體與壁面作用力;b-爬壁機器人兩履帶吸附中心距離;B-爬壁機器人橫向翻轉(zhuǎn)極限點
根據(jù)圖4參數(shù)可得:
n×N×0+n×N×B-Q·L≥0
(13)
n·N·B-Q·L≥0
(14)
(15)
式中:N3—橫向傾覆失穩(wěn)極限狀態(tài)下單個永磁體吸附力。
2.4 靜止吸附狀態(tài)失穩(wěn)極值計算
根據(jù)以上爬壁機器人常見失穩(wěn)狀態(tài)分析,考慮安全系數(shù),爬壁機器人所需最大吸附力為:
(16)
式中:K—安全系數(shù)。
根據(jù)設(shè)計參數(shù)可得:Q=400 N,L=60 mm,p′=33 mm,n=11,B=30,f靜=0.4,K=1.5。將參數(shù)代入式(16)可得:N≥68.18 N。
可見,要實現(xiàn)爬壁機器人的穩(wěn)定吸附,其與壁面貼合吸附的每個吸附單元所需提供的吸附力N≥68.18 N。
3 永磁吸附結(jié)構(gòu)設(shè)計與仿真分析
3.1 方案設(shè)計
根據(jù)上述分析計算可知,每個吸附單元應(yīng)具備至少“68.18 N”的吸附力,同時考慮吸附單元外部需要嵌套防磨橡膠,因此設(shè)備吸附單元選用稀土永磁材料釹鐵硼(Nd-Fe-B),這種永磁材料磁能積較大,現(xiàn)已在相關(guān)領(lǐng)域得到了的廣泛應(yīng)用[14]。
永磁體單元的布置主要有:“單塊永磁體與兩塊分離永磁體”、“有無扼鐵”等方式。本文經(jīng)過試驗仿真得出,選用兩塊分離永磁體,添加扼鐵的方案產(chǎn)生的相對吸附力最大。
吸附方案如圖5所示。
3.2 磁力仿真
常見風(fēng)電塔筒的壁厚約為15 mm,同時本研究根據(jù)傳動部分設(shè)計結(jié)果,及計算得到的永磁體吸附力,初步確定單塊永磁體尺寸為8 mm×22 mm×30 mm。由此可通過Maxwell軟件進行磁鐵吸附力的仿真。
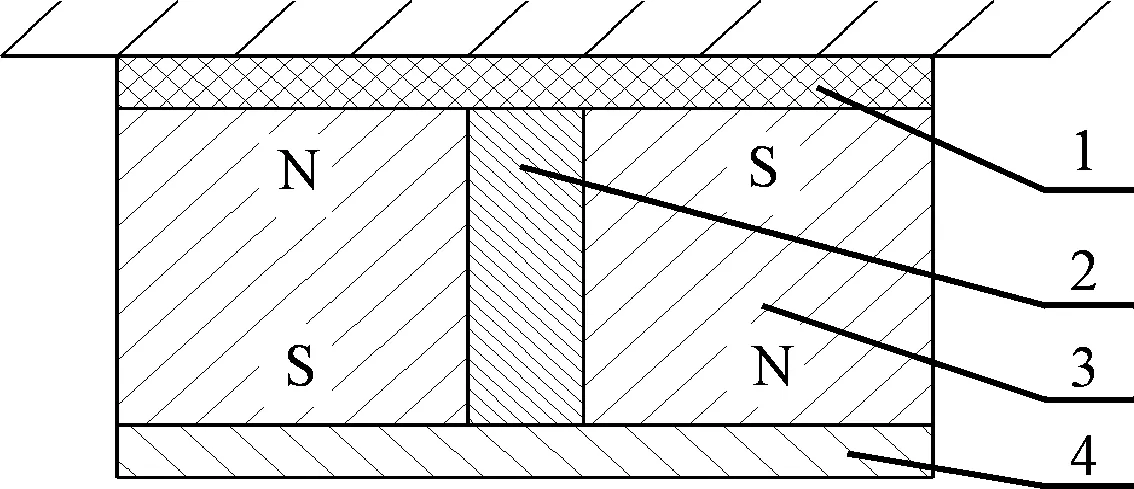
圖5 吸附單元方案1-橡膠隔套;2-隔磁體;3-永磁體;4-軛鐵
令永磁體距壁面的距離、軛鐵的厚度為變量,本研究觀察不同參數(shù)下吸附力的變化情況(仿真采用2D模型,數(shù)據(jù)中對壁面產(chǎn)生吸附力為永磁體厚度為30 mm時,不同參數(shù)變化產(chǎn)生的吸附力大小)。
綜合分析曲線如圖6所示。
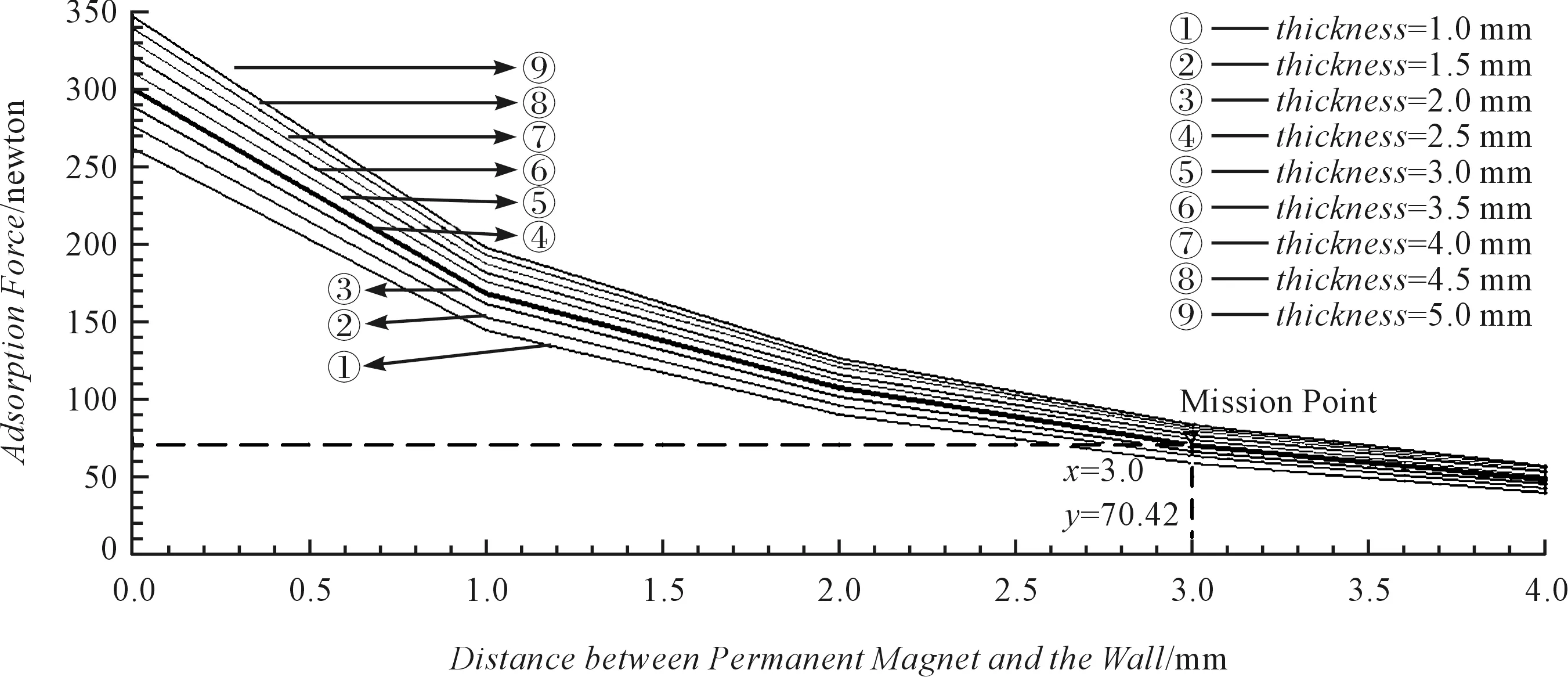
圖6 吸附力綜合分析曲線
4 實驗及結(jié)果分析
根據(jù)綜合分析曲線結(jié)果以及制造難易程度,可得到相對最優(yōu)目標(biāo)點:即當(dāng)永磁體距壁面距離為3 mm,軛鐵厚度為2.5 mm時,所求永磁體吸附力仿真結(jié)果為70.42 N。此結(jié)果最接近計算結(jié)果68.18 N。此時的吸附單元的磁力仿真如圖7所示。
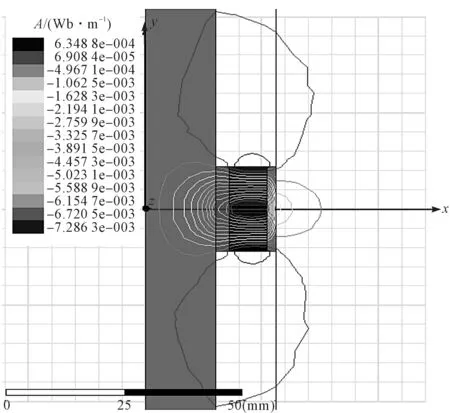
圖7 設(shè)計仿真結(jié)果分析圖
實驗結(jié)果表明:在該實際應(yīng)用條件下,爬壁機器人吸附能力符合穩(wěn)定吸附要求,說明該爬壁機器人結(jié)構(gòu)可以穩(wěn)定吸附于風(fēng)電塔筒外壁面。
根據(jù)吸附單元仿真結(jié)果,結(jié)合吸附單元結(jié)構(gòu)設(shè)計方案及整機設(shè)計方案,最終可得到一種適用于風(fēng)電塔筒外壁檢修的爬壁機器人三維模型,如圖8所示。
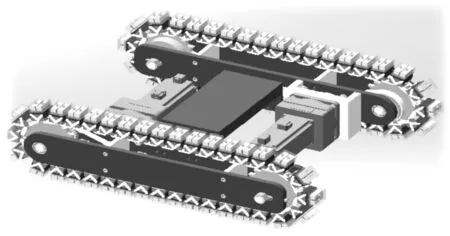
圖8 爬壁機器人結(jié)構(gòu)三維模型
通過在該機器人上安裝不同工具,操作人員即可完成對風(fēng)電塔筒的檢測、清理、修復(fù)等任務(wù)。
5 結(jié)束語
針對風(fēng)電塔筒的檢修工作,通過對爬壁機器人的結(jié)構(gòu)設(shè)計分析,本文借助Solidworks、Maxwell等軟件,設(shè)計了一種雙旋轉(zhuǎn)自由度的爬壁機器人結(jié)構(gòu):
(1)該結(jié)構(gòu)靈活度高,通過雙旋轉(zhuǎn)自由度可使吸附單元自主貼合風(fēng)電塔筒外壁輪廓,保證機器人吸附爬行的穩(wěn)定性;
(2)進行了爬壁機器人靜止?fàn)顟B(tài)下的受力分析,考慮不同情況下的失穩(wěn)邊界條件,根據(jù)給定參數(shù)計算得到吸附單元相對最優(yōu)吸附力N≥68.18 N,并在確定吸附單元構(gòu)型后進行磁力仿真,得到實際情況下吸附力N=70.42 N;
(3)仿真結(jié)果表明:采用該吸附單元的爬壁機器人結(jié)構(gòu),可以穩(wěn)定吸附于風(fēng)電塔筒外壁面。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06