基于動力學的擬人肩關節動載協調分配優化研究*
2018-10-09 07:05:50李研彪羅怡沁徐夢茹
機電工程 2018年9期
關鍵詞:優化
王 林,李研彪*,孫 鵬,羅怡沁,徐夢茹,鄭 航
(1.浙江工業大學 機械工程學院,浙江 杭州 310032;2.浙江工業大學 特種裝備制造與先進加工技術教育部重點實驗室,浙江 杭州 310032)
0 引 言
并聯機構具有結構緊湊、承載能力強、運動慣性小等優點,故廣泛應用于各種擬人關節[1-6]。由于并聯機構的動力學方程是非線性多輸入多輸出系統,存在多種分配組合來實現運動[7-10]。在穩定外載荷作用下,合理地優化分配各驅動可以有效降低能耗、減少驅動力。
目前,主要從驅動力矩最優和能耗最優兩個角度來進行動載協調分配,通過構建力矩分配模型和能量分配模型來實現優化[11-15]。其中,分配方式有加權最小二乘法、規劃載荷分配系數等。但上述優化方法均屬于單目標優化,只考慮驅動力矩或者能耗,且均從瞬時狀態考慮,未衡量機構的整個運動過程。因此,優化結果可能存在驅動力矩、速度等方面的波動或突變,這種波動、突變現象不利于機構的穩定運行。同時,只考慮力矩和能耗最小,也可能出現機構的運動時間較長,不利于提高機構的運動效率。
針對上述動載協調分配優化的不足,本文將考慮機構性能、時間、能耗和力矩波動4個因素,提出一種動載協調分配優化方法,并基于動力學模型,定義綜合性能指標,采用Dijkstra算法優化求解性能最優軌跡,最后用遺傳算法求解得到最優廣義時間。
1 肩關節機構的運動學分析
本文研究的肩關節機構以球面5R并聯機構為原型,肩關節的模型圖如圖1所示。
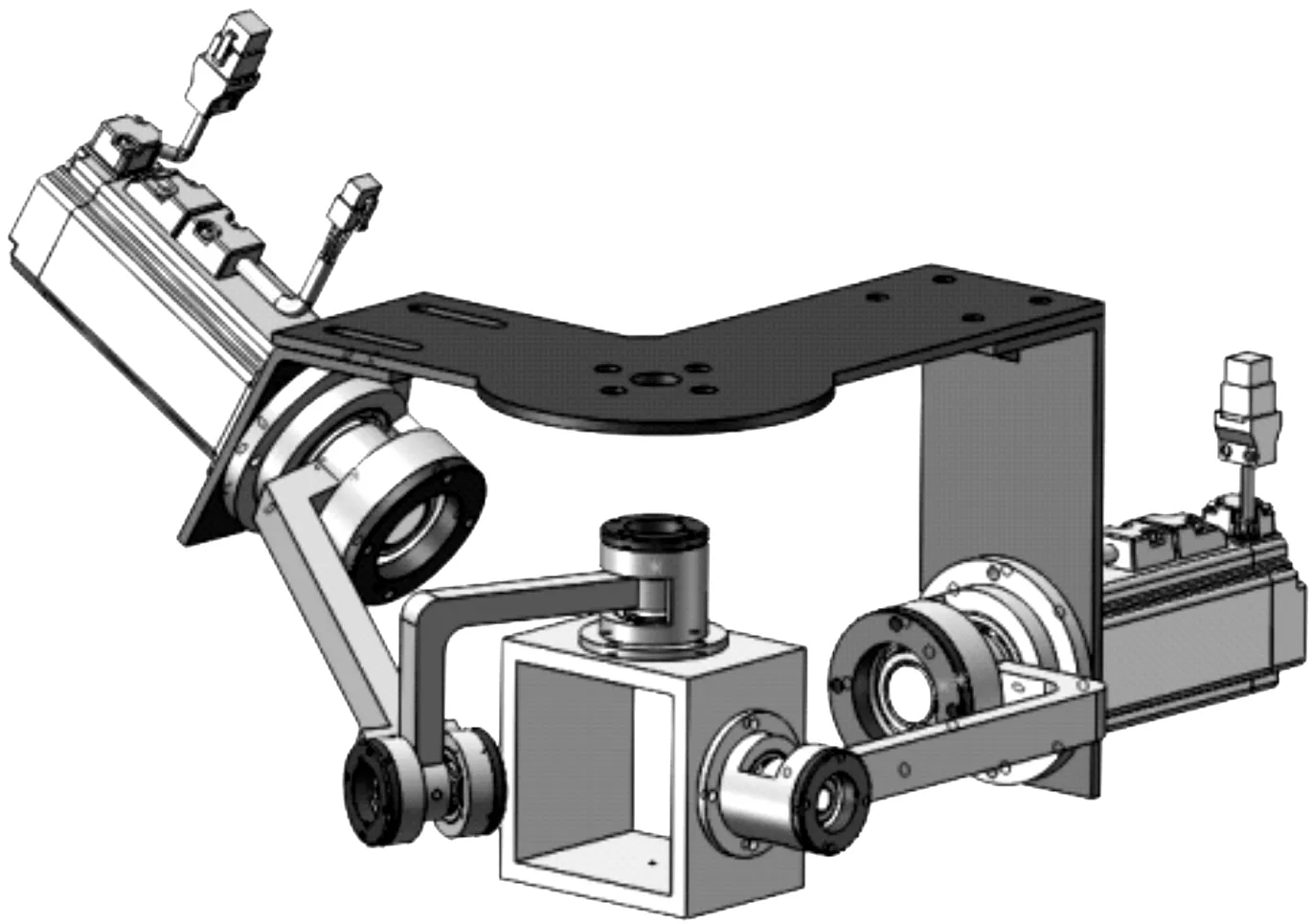
圖1 肩關節的模型圖
該機構由定平臺、動平臺和連接兩者的二條支鏈組成。運動副均為回轉副,且各軸線匯交于O點。其中,軸線OB1與軸線OC1、軸線OA2與軸線OC2、軸線OC1與軸線OC2相互垂直。
肩關節的機構簡圖如圖2所示。
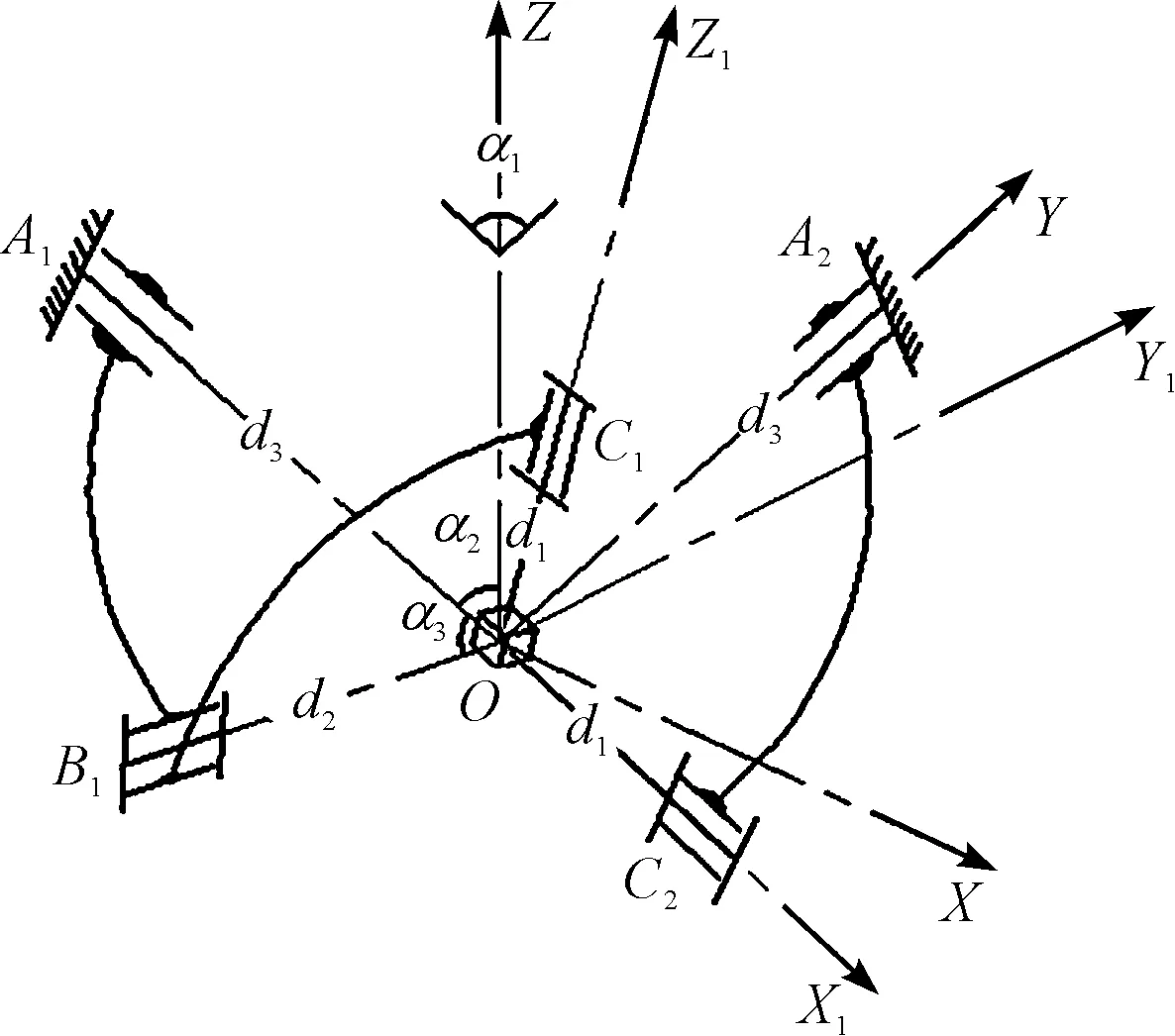
圖2 肩關節的機構簡圖α1—平面A1OZ和平面A2OZ所在平面的夾角,α1=90°;α2—Z軸與軸線OA1的夾角,α2=60°;α3—軸線OA1與軸線OB1的夾角,α3=70°;d1—回轉副C1、C2與機構中心O點的距離,d1=70 mm;d2—回轉副B1與機構中心O點的距離,d2=90 mm;d2—回轉副A1、A2與機構中心O點的距離,d2=185 mm
本研究建立定坐標系{O-XYZ}原點與機構中心O重合,Z軸沿OC1軸線方向,Y軸沿OA2軸線方向,X軸滿足右手螺旋定則。建立動坐標系{O-X1Y1Z1}原點與機構中心O重合,Z1軸沿OC1軸線方向,X1軸沿OC2軸線方向,Y1軸滿足右手螺旋定則。當定坐標系和動坐標系重合時,該機構處于初始位姿。
本研究采用Z-Y-X型的歐拉角描述動平臺的姿態,動平臺繞Z1軸旋轉角度為α,繞Y1軸旋轉角度為β,繞X1軸旋轉角度為γ,其中α=0 rad。關節驅動器1輸入角度為θ1,關節驅動器2輸入角度為θ2。
本研究根據肩關節機構的幾何關系,建立矢量約束方程,化簡可得位置反解:
(1)
式中:
其中,cαi=cosai,sai=sinai,(i=1,2,3)。
將式(1)兩邊對于時間t求導,速度反解可得:
(2)

2 肩關節機構的動力學分析
為了便于建立動力學模型,本研究將肩關節機構的各連桿和動平臺均視為剛體,同時忽略各運動副之間的摩擦力和軸類零件的回轉運動。考慮慣性力、外力作用,建立肩關節機構的動力學模型。
2.1 慣性力分析
本研究采用拉格朗日方程計算肩關節機構的慣性力,將系統慣性力轉換到廣義歐拉坐標q=[γβ]T上。其計算過程如下:
肩關節機構的動能E包括E1和E2(其中:E1—平臺的動能;E2—各連桿的動能)。
(3)
Ip表示過質心坐標系的轉動慣量矩陣,即:
Ip=RIHRT
(4)
式中:R—動平臺歐拉角所對應的旋轉矩陣。
綜合式(3,4),可得動能E1:
(5)
動能E2的求解如下:
(6)
式中:I1—連桿A1B1的轉動慣量;I2—連桿A2C2的轉動慣量;I3—連桿B1C1的轉動慣量。
則肩關節機構的動能為:
(7)

設定坐標系中OXY面為重力零勢能面,由于動平臺的質心與機構中心O點重合,且動平臺始終繞質心旋轉,動平臺勢能變化為零。則機構的總勢能V為:
(8)
式中:zi—各連桿質心坐標的Z軸值;mi—各連桿的質量。
建立拉格朗日方程可得:
(9)
式中:L=E-V,FI—慣性力。
將式(7,8)代入上式,化簡可得:
(10)

2.2 外力分析
設作用在動平臺上的外力為F,均可簡化為過旋轉中心O點的力矩Ms:
Ms=F×r
(11)
式中:r—外力F作用點到旋轉中心O點的矢量。
2.3 動力學模型建立
綜合式(10,11),根據虛功原理,將慣性力FI和外力Ms映射到相應關節上的驅動力矩:
(12)
式中:JT—力雅克比矩陣。
根據式(12)建立的動力學模型可知,肩關節機構驅動力與慣性力和外力兩者有關。其中,慣性力大小受速度、加速度和姿態影響,而外力僅與姿態有關。
2.4 動力學仿真驗證
給出肩關節機構的結構參數如表1所示。
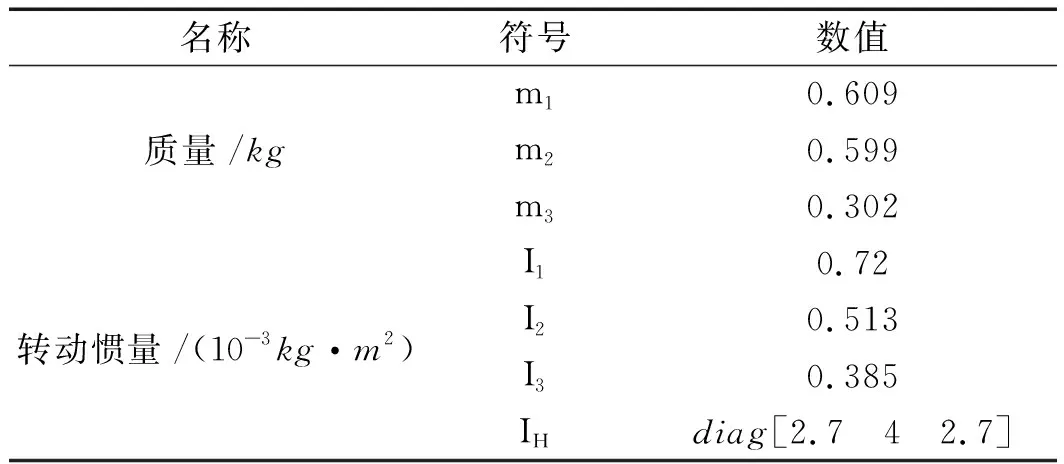
表1 肩關節機構結構參數
外力F=[1 1]N·m,并給出一組動平臺的運動方程:
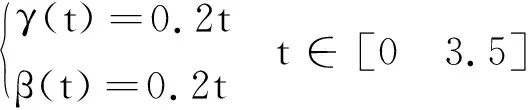
(13)
基于上述動力學模型,將肩關節機構的結構參數和運動方程代入式(12)中,并利用Matlab軟件計算得到肩關節機構的關節驅動力矩。
為了驗證動力學模型的正確性,本研究利用ADAMS動力學仿真軟件對肩關節機構進行動力學仿真,且添加各類約束條件和外力,使得仿真與理論計算的環境保持一致。筆者將仿真得到的驅動力矩與理論計算值進行比較,如圖3所示。
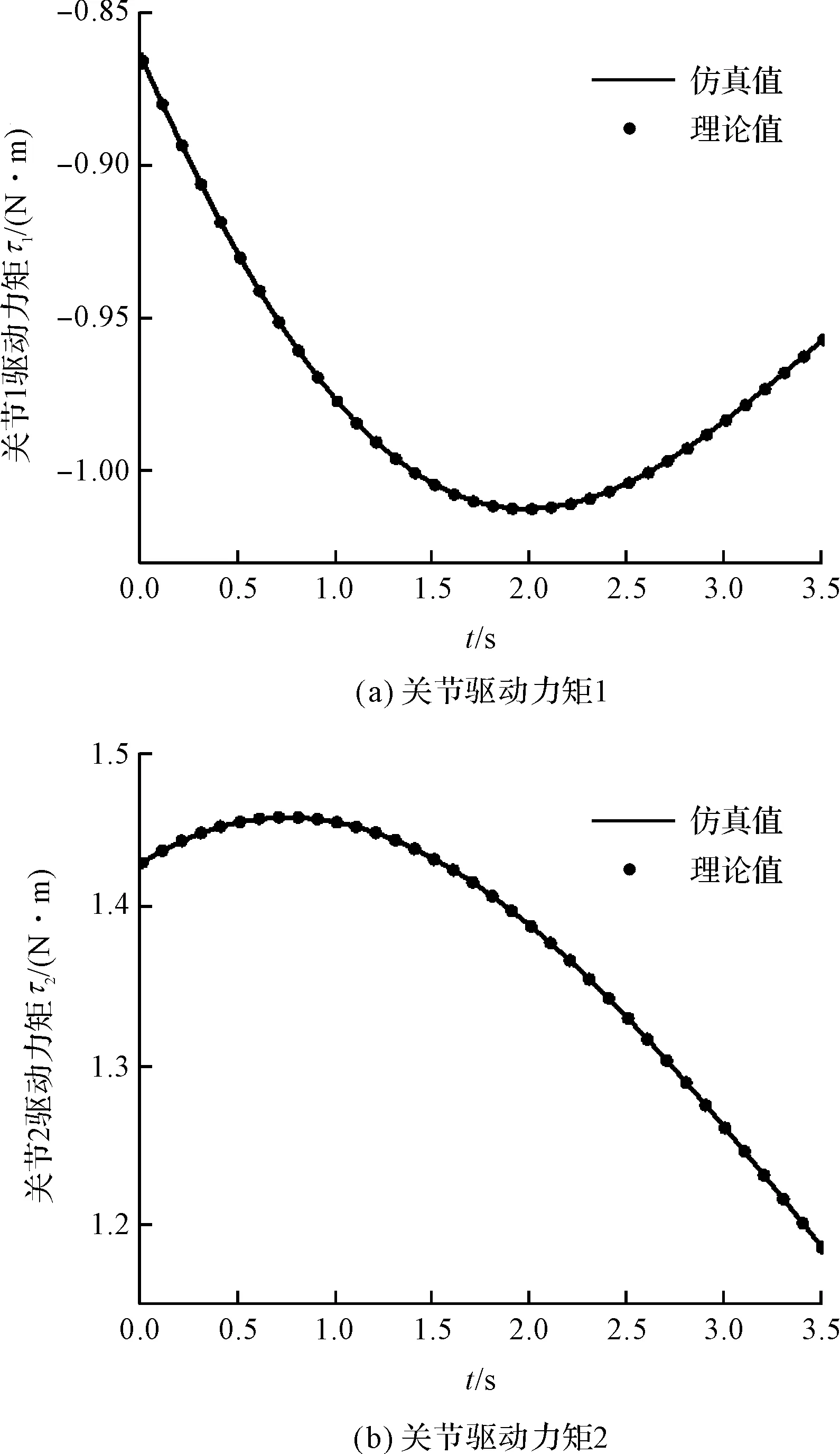
圖3 關節驅動力矩理論值與仿真值
通過對比可得:驅動力矩的理論值與仿真值兩者基本相等,故驗證了動力學模型的正確性。
3 肩關節機構的性能分析
3.1 動力學性能評價指標
肩關節機構不同的運動狀態會影響驅動力的大小,其中,速度、加速度會直接影響機構慣性力的大小。而肩關節機構一般作低速運動,速度較小,故忽略速度對慣性力的影響,只考慮加速度對慣性力的影響,因此式(10)可簡化為:
(14)

(15)
將式(15)求導,化簡可得:
(16)
式中:λ—矩陣DTD的特征值。
由式(16)可知:在工作空間W內,λ隨機構姿態變化而變化,且λ值越小表明由加速度引起的慣性力越小,因此將km作為動力學傳遞性能評價指標:
(17)
km數值越大,表示肩關節機構的動力學傳遞性能越好,則km在工作空間W的全域值為:
(18)
且肩關節機構存在多個輸入力矩,其差值越大則動力學傳遞性能越差,因此將kmc作為動力學傳遞均衡性能評價指標:
(19)
kmc數值越接近于1,表示肩關節機構的輸入力矩偏差越小,其動力學傳遞均衡性能越好,則kmc在工作空間W的全域值為:
(20)
3.2 力映射性能評價指標
由動力學模型可知,慣性力和外力通過虛功原理,將其映射為關節的驅動力矩。其中,力雅克比矩陣JT代表該映射關系,其值受機構姿態影響,即:
τ=JTτF
(21)

由于在工作空間W內,rank(J)=2,力雅克比矩陣JT可以奇異值分解,存在正交陣U∈R2×2和V∈R2×2,使:
JT=UΛV
(22)

設歐拉坐標系上的廣義力τF為單位向量可得:
τTU(ΛΛT)-1UTτ=1
(23)
當廣義力τF為單位矩陣時,關節驅動力矩分布在橢圓上;σi值越大,表明廣義力轉換到關節驅動力矩的效率越高,因此將kJ作為力傳遞性能評價指標[17-20]:
kJ=σ2
(24)
kJ數值越大,表示肩關節機構的力傳遞性能越好。則kJ在工作空間W的全域值為:
(25)
當σ1=σ2時,關節驅動力矩分布在圓上,關節驅動力矩之間的差值最小,因此將kJc作為力傳遞均衡性能評價指標:
(26)
kJc數值越接近于1,表示肩關節機構的力傳遞均衡性能越好,關節驅動力矩之間的偏差越小。則kJc在工作空間W的全域值為:
(27)
4 肩關節機構的動載協調分配優化
在穩定外載荷作用下,要求肩關節機構從起點運動到終點,但由于其運動軌跡和運動狀況的不確定性,存在多組運動方式。本文先依據性能指標得到性能最優的軌跡,再通過遺傳算法優化求解最優廣義時間,使得肩關節機構在能耗最低、時間最快、性能最好的情況下完成運動。
4.1 性能最優路徑規劃
為綜合考慮動力學性能和力映射性能因素,筆者采用加權求和法,將上述多性能指標轉換成單性能指標。
通過式(18,20,25,27),分別求解出各性能指標在全域范圍內最大值kimax和最小值kimin,則不同姿態下的各性能指標可表示為:
(28)
式中:Ki—性能指標在全域變換范圍內的比值,Ki值越大,機構性能越好。
綜合考慮上述4個性能指標的影響,構造綜合性能指標函數:
(29)
式中:δi—目標比重系數。
δi值越大表示該衡量指標越重要。本文δi均等于1,將各性能指標視為相同比重,且Kmin值越小,機構的綜合性能越好。
給定機構起點q0=[0 0]T,終點qt=[-1.5 1]T,在起點至終點區域,均勻采樣n個控制點(每個控制點代表一種運動姿態,即動平臺運動經過的點),且每個控制點對應一個綜合性能指標值。從起點運動到終點,建立路徑規則。從起點出發,可以到達相鄰3個控制點(控制點1、控制點2和控制點4);之后,再從某一個控制點出發,可以達到下一個相鄰的3個控制點;以此類推,最終達到終點。
路徑規則如圖4所示。
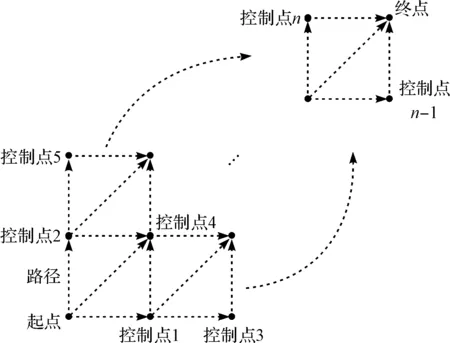
圖4 路徑規則
采用上述方式,可以得到數個由控制點組成的路徑。根據式(29),筆者將一條路徑上所有控制點的綜合性能指標值求和,代表該條路徑的綜合性能。采用Dijkstra算法優化求解出從起點到終點的最優路徑,滿足路徑最短、綜合性能最好。
性能最優路徑如圖5所示。
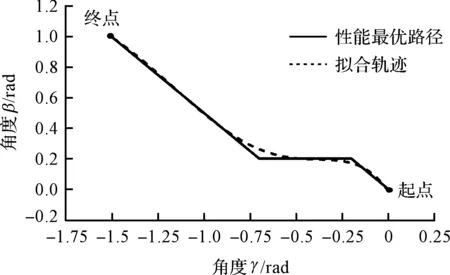
圖5 性能最優路徑
由于規劃出的路徑為折線,無法實現光滑軌跡運動,基于上述性能最優路徑的結果,本研究采用B樣條曲線擬合方法構造動平臺運動軌跡,并得到動平臺運動方程:
(30)
式中:u—路徑中第u個控制點,u∈[0,15]。
4.2 廣義時間優化
根據上述建立的性能最優軌跡可知,動平臺的運動軌跡與參數u有關。通過建立參數u與時間t的函數,可以進一步確定機構的速度特性。因此,建立參數u關于時間t的函數:
u(t)=a0+a1t+a2t2+a3t3+a4t4
(31)
式中:ai—時間函數的系數。
由于機構需要滿足起點和終點的位置約束條件,且在起點和終點處速度為零,故建立時間約束方程:
(32)
式中:u0=0,u1=15;T—機構完成運動的時間。
同時,考慮肩關節機構的關節驅動器輸出速度和力矩存在最大值,故建立關節輸出約束方程:
(33)
為實現肩關節機構在最短時間內完成運動,建立時間優化目標函數:
(34)
機構在運動過程中,可能存在時間很短而能耗很大或者關節力矩變化很大的情況,屬于不理想的工作狀況。因此,需要考慮能耗和關節力矩因素,故建立能耗優化目標和力矩波動優化目標:
(35)

(36)
式中:Fτ—力矩波動優化目標,為機構關節運動的力矩變化率,衡量關節力矩的波動情況。
綜合考慮時間、能耗和力矩波動,建立廣義時間優化目標函數:

(37)
則優化過程如下:首先根據式(30,31)計算出動平臺的角度和角速度;其次通過式(1,2)得到關節驅動角度和角速度;然后根據式(13)動力學模型計算出關節驅動力矩;通過式(37)得到廣義時間優化目標函數;采用遺傳算法對時間函數式(31)進行優化求解,得到最優的廣義時間。設定種群個數為100,基因數為80,迭代代數為110,變異概率為0.1,交叉概率為0.5。
廣義時間優化結果如圖6所示。
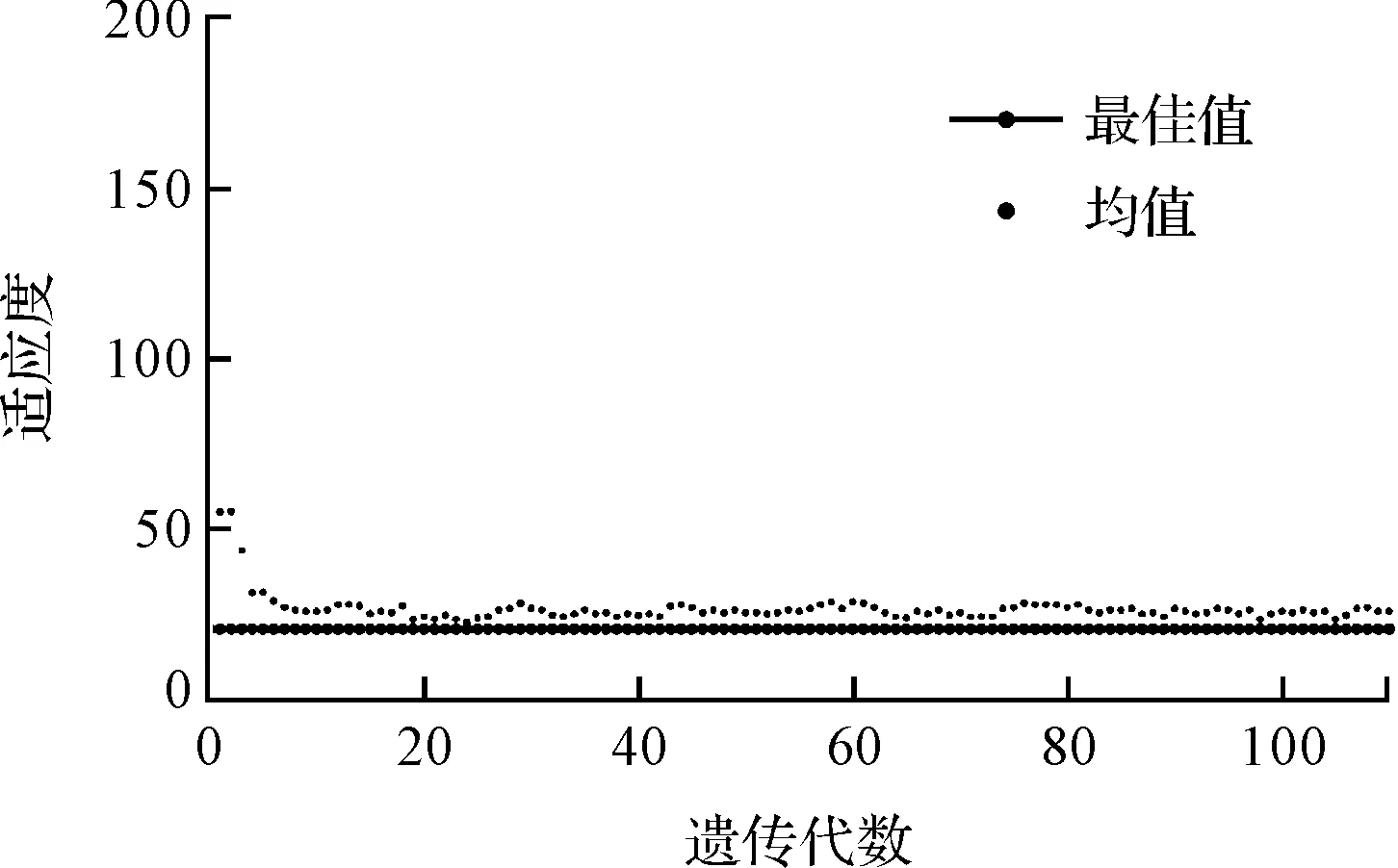
圖6 廣義時間優化結果
由圖6可知:經過數代運算后收斂,得到優化結果為:時間T=2.03 s;時間函數系數a0=0,a1=0,a2=8.85,a3=-1.58,a4=-0.48。將優化結果代入式(31)得到時間函數,并根據式(1,2,12,30),通過Matlab軟件計算,得到優化后關節驅動力矩、關節角速度。
關節驅動力矩如圖7所示。
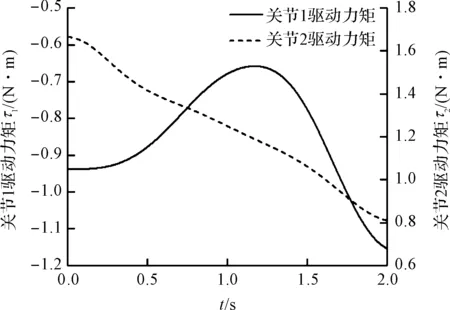
圖7 關節驅動力矩
關節角速度如圖8所示。

圖8 關節角速度
由圖7和圖8可知:關節驅動力矩和關節角速度均為光滑曲線,不存在突變現象,說明優化后,關節驅動器能夠實現平穩運行。在起點和終點時刻,關節輸出角速度均接近于零,符合實際運動狀況。兩個關節的驅動力矩和角速度值均處于同一數量級,數值大小接近,說明該優化方法能夠把機構慣性力和外力合理地分配到兩個關節上,說明采用上述動載協調分配優化方法,肩關節機構能夠在時間最短、能耗最低、性能最好的條件下完成運動。
5 結束語
本研究結合拉格朗日方程和虛功原理,建立了肩關節機構的動力學模型,并用動力學仿真軟件驗證了上述動力學模型的正確性;然后基于動力學模型,構建了動力學性能指標和力映射性能指標,采用加權求和法將各性能指標轉換為綜合性能指標,并利用Dijkstra算法求解得到綜合性能最優的軌跡;最后基于性能最優軌跡,考慮時間、能耗和力矩波動3個因素,建立廣義時間優化目標函數,采用遺傳算法優化時間函數,得到最優的廣義時間。
通過上述動載協調分配優化,使得肩關節機構能夠在時間最短、能耗最小、性能最好的條件下完成運動。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45