北斗接收機位置解算算法及驗證
2018-10-09 03:25:46劉瑞華丁其金
全球定位系統 2018年4期
劉瑞華,丁其金
(中國民航大學 電子信息與自動化學院,天津300300)
0 引 言
北斗衛星導航系統(BDS)是我國自主建設、獨立運行的衛星導航系統,正在逐步完善,2020年前后,將向全球提供服務[1]。其應用范圍也越來越廣,在農業、交通及航空等各個行業中發揮著越來越重要的作用。因此,對北斗接收機的需求也越來越大,各導航設備研制單位競相展開了北斗接收機的研制工作。雖然不同的應用環境,對北斗接收機要求的側重點不同,但接收機位置解算都是必須考慮的部分。本文對北斗接收機的位置解算過程進行分析研究,并結合MATLAB軟件,分別使用北斗空間控制接口文件所提供的算法解算北斗衛星位置和最小二乘法解算北斗接收機位置,并進行精度分析,驗證了算法的正確性和可行性。
1 利用廣播星歷解算衛星位置
北斗衛星位置解算是接收機位置解算中至關重要的一部分,因為衛星位置是否準確直接影響了接收機的定位精度。北斗衛星導航系統采用三種軌道衛星,即地球同步軌道 (GEO)、傾斜地球同步軌道(Inclined IGSO)和中地球軌道(MEO)組成的混合星座[1],因此,北斗衛星位置的解算方法與GPS略有不同。其中IGSO、MEO衛星計算方法相同,GEO衛星因其軌道傾角和偏心率均很小,需采用坐標系旋轉的方法增大軌道傾角以提高衛星位置的計算精度[2-3]。北斗官方文件[4]給出了北斗衛星位置解算的星歷參數用戶算法,這里不再贅述,圖1為算法流程框圖,表1示出了星歷參數及其定義。
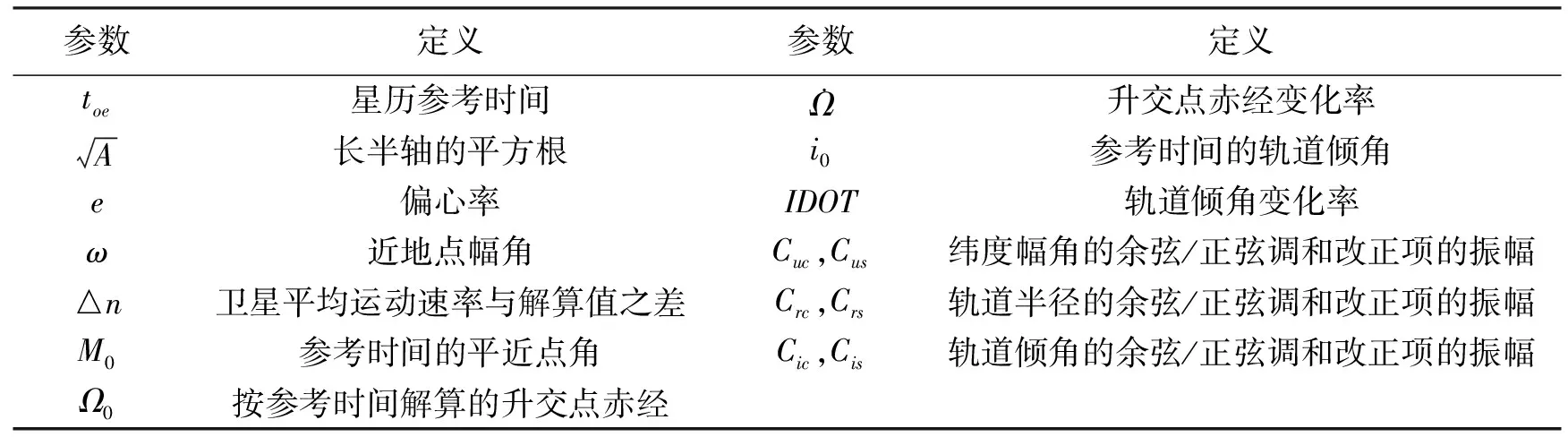
表1 星歷參數及其定義
本節使用諾瓦泰FlexPark6北斗接收機2018年3月2日2點至23點采集到的實測星歷數據,按照文獻[4]中的算法進行北斗衛星位置解算,并將解算出的衛星位置分別和精密星歷以及諾瓦泰 FlexPark6北斗接收機所提供的衛星位置進行對比,分析所解算出的衛星位置精度。本文使用武漢大學提供的代號為WUM的精密星歷,徑向誤差優于10 cm,比廣播星歷精度高出1-2個數量級[5];根據諾瓦泰給出的FlexPark6技術指標,該接收機水平定位精度達到1.5 m(RMS),時間精度為20 ns,因此均可以作為真值來評估所解算衛星位置的精度。
按照文獻[4]中的算法,進行北斗衛星位置解算,在解算過程中需注意以下幾個問題:
1) 在計算時間差tk時,必須考慮周變換的開始或結束。
2) 按照上述算法所解算的衛星位置是衛星在信號發射時刻的位置,而北斗接收機位置解算過程中所使用的卻是信號接收時刻的衛星位置。事實上,如果直接將求解的衛星位置和接收機所提供的衛星位置對比,會發現所有類型衛星位置三維坐標互差絕對值的RMS均在350 m左右。原因是信號接收時刻的地心地固坐標系,是由在信號發射時刻的坐標系繞地球自轉軸(即坐標系的Z軸)自西向東旋轉而成的[6-7]。因此,當以諾瓦泰北斗接收機所提供的衛星位置作為真值進行比較時,要結合偽距觀測量,進行地球自轉誤差的修正。
3) 統一時間系統。利用廣播星歷所計算的北斗衛星位置采用的是北斗時,而精密星歷以及北斗接收機所提供的北斗衛星位置采用的卻是GPS時,因此對比時需要統一時間系統。本文將時間統一為GPS時。
4) 精密星歷按照15 min的時間間隔給出衛星在空間上的三維坐標,采樣間隔太大,不利于對比分析。本文采用滑動拉格朗日插值法對所提供的衛星位置進行插值,以獲得較小的采樣間隔。文獻[8]證明了采用滑動式拉格朗日插值法可以獲得mm級的精度,滿足研究需求。
在解決了上述問題后,便可以分別與精密星歷和北斗接收機所提供的衛星位置進行對比分析。將接收機所提供的衛星位置作為真值,三個坐標互差的絕對值分別設為|dX1|、|dY1|、|dZ1|;將精密星歷所提供的衛星位置作為真值,三個坐標互差的絕對值分別設為|dX2|、|dY2|、|dZ2|。數據處理結果如圖2至圖7及表2所示。
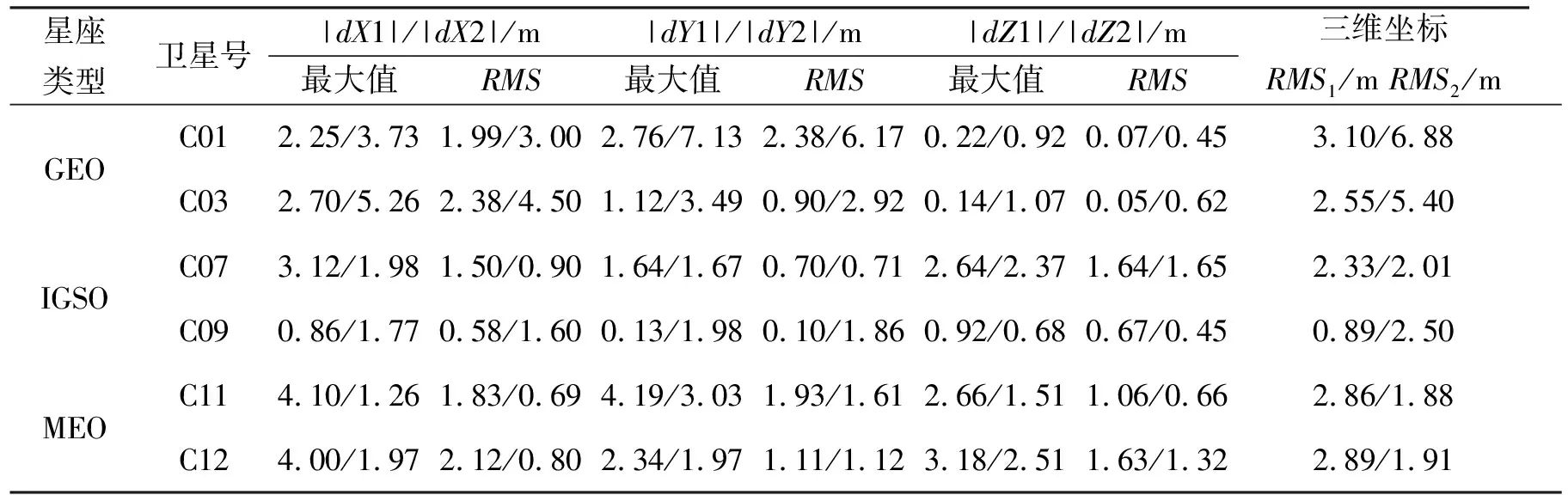
星座類型衛星號|dX1|/|dX2|/m|dY1|/|dY2|/m|dZ1|/|dZ2|/m最大值RMS最大值RMS最大值RMS三維坐標 RMS1/m RMS2/mGEOC012.25/3.731.99/3.002.76/7.132.38/6.170.22/0.920.07/0.453.10/6.88C032.70/5.262.38/4.501.12/3.490.90/2.920.14/1.070.05/0.622.55/5.40IGSOC073.12/1.981.50/0.901.64/1.670.70/0.712.64/2.371.64/1.652.33/2.01C090.86/1.770.58/1.600.13/1.980.10/1.860.92/0.680.67/0.450.89/2.50MEOC114.10/1.261.83/0.694.19/3.031.93/1.612.66/1.511.06/0.662.86/1.88C124.00/1.972.12/0.802.34/1.971.11/1.123.18/2.511.63/1.322.89/1.91
對統計結果進行分析可以看出:1) 將北斗接收機所提供的北斗衛星位置作為真值,經過對地球自轉誤差的修正,三維坐標RMS均在5 m以內。即在位置解算過程中,如果不考慮地球自轉的影響,將會產生較大的誤差;2) 將精密星歷所提供的北斗衛星位置作為真值,三維坐標RMS均在10 m以內;以C07、C09號衛星為代表的IGSO衛星和以C11、C12號衛星為代表的MEO衛星三維RMS小于以C01和C03號衛星為代表的GEO衛星,即IGSO和MEO衛星精度好于GEO衛星。以上結果證明了所解算的衛星位置的正確性,同時驗證了星歷參數用戶算法的正確性。
2 北斗接收機位置解算
本文使用基于線性迭代的最小二乘法解算接收機位置,因為該方法的位置解算僅使用當前數據,因此復雜度低,容易實現,是北斗接收機中最常用的方法[9]。其主要思想是根據當前參數矩陣迭代當前的解,直到誤差小于用戶預定的門限值,其解算過程如下:
1) 偽距觀測量修正
從諾瓦泰接收機中所獲得的偽距ρi(i表示不同的衛星)包含了衛星鐘差、電離層延時及對流層延時等誤差[10],需對其進行修正。即:
ρi=ri+cδtu-cδts+I+T+ερi,
(1)
(2)
2) 構建偽距觀測量方程
假設可以得到n顆衛星的偽距觀測量,則偽距觀測量方程為
(3)
3) 線性化偽距觀測方程
假設用戶位置和接收機鐘差的初始值為(x0,y0,z0,δtu0),基于這個初始值將式(3)進行一階泰勒級數展開得到:
(4)
定義如下矢量:
hi
(5)
dx0[(xu-x0),(yu-y0),(zu-z0)]T,
(6)
式(5)中前三列由衛星位置與用戶估計位置之間的方向余弦組成,第四列為常值1;dx0為線性化后初始點和真實位置之間的修正量。將式(5)、(6)帶入到式(4)并略去高階項整理得:
δρi=hidx0+ερi
(7)
(8)
將式(8)整理為矩陣的形式:
δρ=Hdx0+ερ.
(9)
4) 求解修正量
dx0=(HTH)-1HTδρ.
(10)
5) 更新接收機位置
x1=x0+dx0
(11)
6) 判斷牛頓迭代的收斂性
以更新后的接收機位置和鐘差為初始位置,重復步驟2)-5),對于第k次更新來說,
(12)
判斷‖dxk-1‖是否小于預定的門限值,預定的門限值取決于用戶的精度需求,本文將門限值設為0.001。如果已經小于門限值,則可以將當前這一次迭代計算后的更新值(即xk)作為接收機的位置和鐘差。即:
xk=xk-1+dxk-1.
(13)
為了驗證上述算法的正確性,本文選取天津某已知基準點2018年3月2日2點至23點諾瓦泰北斗接收機接收到的偽距信息結合第2節所解算的北斗衛星位置進行接收機位置解算,并以諾瓦泰接收機所提供的位置信息作為真值進行精度分析。上文提到諾瓦泰FlexPark6接收機水平定位精度達到1.5 m(RMS),時間精度為20 ns,因此可以作為真值來評估所解算接收機位置的精度。數據處理結果如圖8至圖10及表3所示。
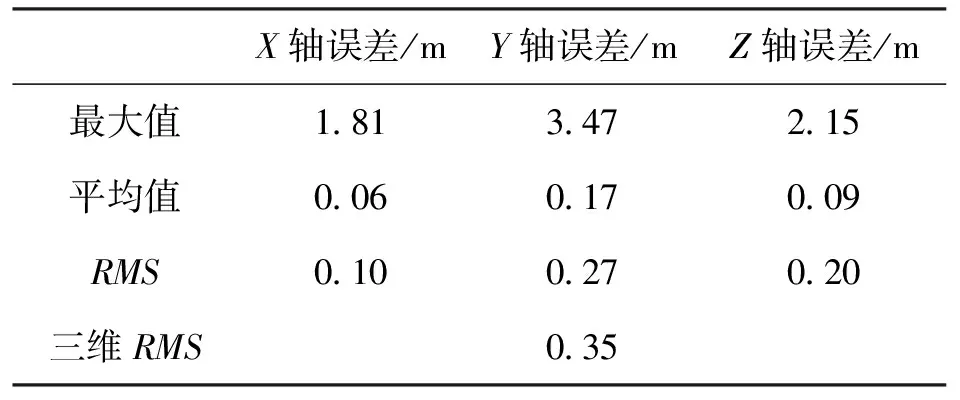
X軸誤差/mY軸誤差/mZ軸誤差/m 最大值1.813.472.15 平均值0.060.170.09 RMS0.100.270.20 三維RMS0.35
由圖8和圖9可以看出所計算的接收機位置分布較為密集,三維方向上波動不大。圖10和表3為對比結果,可以看出: 1) 三個方向上誤差最大均不超過5 m,誤差平均值均小于0.5 m,三維RMS也小于0.5 m; 2) 通過圖10可以看出,三個方向上誤差都集中在1 m以下,個別時間段出現較大誤差,經分析發現,出現較大誤差的原因是衛星個數減少,DOP值變大。結果表明,定位精度均優于北斗官方性能規范中要求的精度[11],證明了所解算接收機位置的正確性,從而證明了最小二乘法用于北斗接收機位置解算的可行性。
3 結束語
本文利用實測數據驗證了北斗接收機位置解算中所涉及到的算法的正確性,并指出衛星位置及接收機位置解算過程中需要注意的問題。數據計算結果顯示,利用文獻[4]中星歷參數用戶算法解算出的北斗衛星位置以及利用最小二乘法解算出的接收機位置精度均滿足北斗官方性能規范要求。接收機位置解算作為接收機基本功能之一,所得出的位置精度直接體現了接收機的性能好壞。因此,對位置解算過程中涉及到的相關算法進行驗證,為北斗接收機的設計和研發提供了更可靠的理論依據,具有重要的現實意義。
