軌道不平順作用下動車組安全運行速度限值研究
2018-09-21 09:36:08張榮鶴徐井芒
鐵道標準設(shè)計 2018年10期
張榮鶴,王 平,汪 鑫,徐井芒
(西南交通大學(xué)高速鐵路線路工程教育部重點實驗室,成都 610031)
由于地質(zhì)和自然災(zāi)害的原因,線路基礎(chǔ)結(jié)構(gòu)會發(fā)生不同程度的變形,導(dǎo)致無砟軌道結(jié)構(gòu)水平、高低及軌向的變化,產(chǎn)生幾何不平順。軌道不平順和隨機不平順會惡化列車運行條件,列車以設(shè)計速度運行時,將存在較大的安全隱患,可能引起列車脫軌[1]。
當出現(xiàn)較大的幾何尺寸偏差之后,除應(yīng)進行補修、搶修之外,列車應(yīng)立刻采取限速或停運的處理方式。我國《高速鐵路無砟軌道線路維修規(guī)則》中對于線路軌道靜態(tài)幾何尺寸容許偏差管理值做出了說明,給出了200~250 km/h線路作業(yè)驗收、經(jīng)常保養(yǎng)、臨時補修以及限速160 km/h等狀態(tài)下的各靜態(tài)幾何尺寸容許偏差管理值。但基礎(chǔ)的變形程度具有不確定性,規(guī)范中僅對限速160 km/h的各項靜態(tài)偏差做出限值,當實際的幾何不平順超出此限值后,列車的限行速度將面臨無規(guī)范可依的局面。因此,對于不同程度的偏差影響下,動車組安全運行速度限值的研究是十分必要的。
我國在軌道不平順管理方面開展了大量研究工作,黃玉純[2]運用數(shù)學(xué)方法以及計算機技術(shù)對城市軌道交通工務(wù)管理中的數(shù)據(jù)采集手段、評價方法和評價指標進行了初步的探討。張旭久[3]通過仿真計算,從安全和舒適的角度上得到高速列車350 km/h軌道不平順管理標準建議值。田國英等[4-6]利用軌道譜研究軌道不平順在頻域的演變規(guī)律及相應(yīng)的軌道譜限值,并基于車輛-軌道耦合動力學(xué)理論,提出利用高速鐵路軌道不平順譜進行不同管理等級軌道不平順限值估算的方法。蔡成標等[7]基于車輛-軌道耦合動力學(xué)理論,以10 m波長諧波軌道不平順為輸入激擾,進行了貨車車輛運行條件下各種類型軌道不平順的安全管理限值的仿真分析。陳果等[8-9]利用車輛-軌道耦合動力學(xué)模型,針對250 km/h速度等級的高速鐵路,進行了0.01~1 m波長范圍高低短波不平順和40 m波長諧波不平順安全管理值的分析計算。徐金輝等[10]比較了峰值管理和均值管理這兩種評價軌道平順狀態(tài)的方法。全順喜等[11]提出無砟軌道高低和方向是軌道靜態(tài)平順性控制中最重要的2個方面,并從軌道不平順譜的角度對各種高低和方向不平順控制方法進行分析。李明華等[12]探討了軌道高低不平順對列車垂向加速度的影響;通過與國內(nèi)外相關(guān)標準的比較,提出在速度300 km/h時應(yīng)滿足的軌道最大高低不平順幅值。楊飛等[13]分析了軌道不平順波長對車輛動力學(xué)性能的影響,得出高速鐵路長波不平順管理波長。管震舜[14]研究了不同波長、不同幅值下軌道不平順激擾作用對直線軌道和在曲線軌道上等多種不同工況條件下動力響應(yīng)的影響。
盡管對于不平順限值的研究已經(jīng)有了一定的成果,但是針對不同限速等級的不平順限值研究還未曾展開。因此,本次研究將以不同限速等級下的不平順限值作為重點。
1 研究原理與方法
1.1 不平順時域樣本的獲取
軌道不平順譜是在大量軌道不平順實測數(shù)據(jù)基礎(chǔ)上,通過功率譜估計以及非線性曲線擬合方法得到的頻率(波長)與功率譜密度間的復(fù)雜函數(shù)關(guān)系,能夠用來表征某一類線路的總體幾何狀態(tài)。同時,軌道不平順譜還包含了隨機不平順的各類波長成分。因此,以軌道譜反演出的隨機不平順作為輸入激勵,進行軌道不平順的幅值限值的估算,不僅能反映軌道不平順的隨機特性,而且估算的限值更具有普遍性和一般性。本次研究中,采用德國低干擾不平順譜反演隨機不平順樣本作為激勵。
國內(nèi)外研究時,通常將軌道不平順假設(shè)為平穩(wěn)隨機過程,近似服從正態(tài)分布。故可以通過3σ原理來劃分不同等級的不平順樣本。在此條件下,通常認為概率小于正態(tài)分布中P(X>|μ±3σ|)=0.27%的事件為不可能事件。在反演不平順樣本時,針對某一等級的不平順限值,應(yīng)保證樣本超限的概率不大于0.27%。因此,將不平順樣本的10 m弦測值擬合為正態(tài)分布后,統(tǒng)計其|μ±3σ|值,即為該樣本所對應(yīng)的不平順限值。同時參考《高速鐵路無砟軌道線路維修規(guī)則》中對軌道不平順管理波長范圍,本文反演不平順時設(shè)定波長在1.5~42 m。
1.2 軌道幾何不平順動、靜關(guān)系
通過動力學(xué)仿真計算得到的不平順限值應(yīng)為動態(tài)管理值,要得到軌道靜態(tài)幾何尺寸容許偏差管理值,需要利用軌道動靜態(tài)幾何不平順之間的關(guān)系加以轉(zhuǎn)化。在“干線軌道不平順靜態(tài)緊急補修標準和動態(tài)保養(yǎng)標準、作業(yè)驗收標準的研究”中,建立了圖1所示的軌道幾何不平順動、靜關(guān)系統(tǒng)計曲線。曲線Ⅰ是在95%置信條件下,靜態(tài)值和動態(tài)平均值的關(guān)系曲線,曲線Ⅱ為95%置信條件下,靜態(tài)值和最大可能動態(tài)值的關(guān)系曲線。本次研究中,將采用曲線Ⅰ進行動、靜幾何不平順的轉(zhuǎn)化,最終得到動車組不同限速條件下的軌道靜態(tài)幾何尺寸容許偏差管理值。
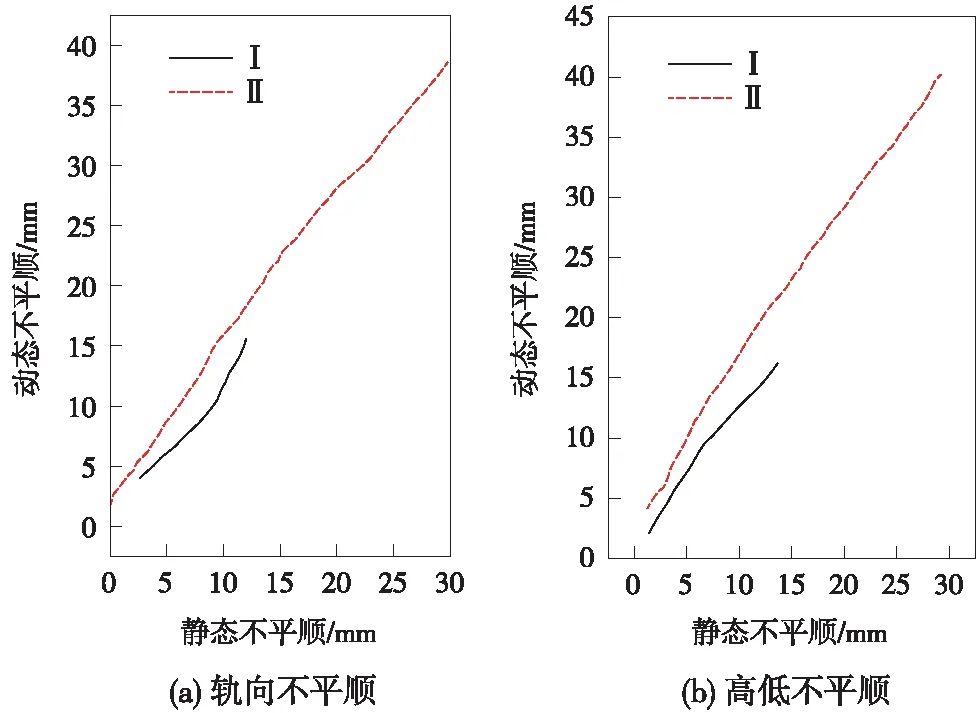
圖1 軌道幾何不平順動、靜關(guān)系統(tǒng)計曲線
1.3 研究流程
(1)利用德國低干擾不平順譜反演隨機不平順樣本。通過3σ原理,將不平順樣本的10 m弦測值擬合為正態(tài)分布后,統(tǒng)計其|μ±3σ|的值,即為該樣本所對應(yīng)的不平順限值。
(2)對CRH2A型車和CRH5型車分別建立計算模型,施加隨機不平順樣本進行計算。
(3)將計算得到的車體橫向加速度、車體垂向加速度、輪重減載率、脫軌系數(shù)4個動態(tài)評價指標與規(guī)范中的限值相比較。如果沒有超過限值,則換用不平順限值更大的樣本重新計算。
(4)當計算得到的動態(tài)評價指標剛剛達到或超過限值時,此時的不平順樣本的|μ±3σ|值即為當前車速下,限速至下個等級的動態(tài)不平順限值。例如,250 km/h的車速下,軌向動態(tài)不平順8 mm時評價指標超限,則說明列車需要限速處理。8 mm即為限速160 km/h的軌向動態(tài)不平順限值。
(5)更換速度等級,重復(fù)進行(2)~(4),直至得到所有速度等級下的動態(tài)不平順限值。
(6)通過動、靜態(tài)軌道不平順關(guān)系,得到軌道幾何偏差靜態(tài)管理限值。
本次研究的流程如圖2所示。

圖2 研究流程
2 計算模型
為了研究無砟軌道軌向和高低不平順對車輛-軌道耦合系統(tǒng)的動態(tài)影響,根據(jù)多剛體系統(tǒng)動力學(xué)理論,對CRH2A型車和CRH5型車分別建立計算模型(圖3),兩種車型各部分結(jié)構(gòu)相同,車輛基本參數(shù)有所差別。車輛系統(tǒng)各部分結(jié)構(gòu)用等效彈簧、阻尼連接。整個車輛系統(tǒng)是由1個車體、2個構(gòu)架、4位輪對和8個軸箱、一系懸掛和二系懸掛組成的多剛體系統(tǒng)。一系懸掛裝置采用雙拉桿軸箱定位方式,安裝垂向減振器和剛彈簧;二系懸掛安裝有搖枕、抗側(cè)滾扭桿、空氣彈簧系統(tǒng)、二系橫向減振器、二系垂向減振器、橫向止擋、抗蛇行減振器等[15]。鋼軌采用無質(zhì)量體來模擬,考慮了鋼軌的真實截面形狀和道岔區(qū)鋼軌截面的變化,建立真實截面的鋼軌模型,并將其與軌枕固結(jié)。
車輛和軌道兩個子模型之間通過輪軌接觸進行串聯(lián),其包括接觸斑、接觸法向力和接觸切向力計算。通過在YOZ平面內(nèi)計算輪軌接觸的彈性壓縮量,確定接觸斑的數(shù)量、大小和位置,等效彈性接觸算法將接觸斑轉(zhuǎn)換為與其面積及產(chǎn)生的輪軌接觸力相吻合的等效橢圓。輪軌法向力和輪軌切向力分別使用Hertz非線性彈性接觸和Kalker線性理論進行計算。

圖3 計算模型
3 計算結(jié)果分析
結(jié)合實際情況,選取CRH2A型車和CRH5型車作為代表車型進行計算;限制車速不宜取得過密,也不宜取得過疏,選取250,160,120,80,40,5 km/h,共6個速度等級進行計算;對計算得到的各評價指標按99.73%置信度取值。
采用軌向和高低兩類不平順時域樣本,每類樣本的10 m弦測值經(jīng)統(tǒng)計得到|μ±3σ|值,依次從4 mm取至50 mm,取值間隔為1 mm,共計94個不平順樣本。以10 mm為例,10 m弦測值的|μ±3σ|值為10 mm的軌向、高低不平順,如圖4所示。

圖4 10 m弦測統(tǒng)計值10 mm的軌向、高低不平順波形
本次研究中主要提取的評價指標為以下4個:車體橫向加速度、車體垂向加速度、輪重減載率、脫軌系數(shù)。其中,輪重減載率和脫軌系數(shù)分別提取動車前轉(zhuǎn)向架第一輪對的左右輪的計算結(jié)果。將計算結(jié)果同樣按照99.73%置信度來進行統(tǒng)計處理,以排除極小概率的值,同時保證經(jīng)濟性和行車的安全性。
施加軌向動態(tài)不平順樣本時,由圖5可以看出,各評價指標均隨不平順的增大而增大。其中,車體橫向加速度在5 mm時超過I級標準,6 mm時超過Ⅱ級標準;車體垂向加速度在不平順4~9 mm的范圍內(nèi)均未超過I級標準,且值均非常小,接近于0;輪重減載率隨不平順的增大而大幅增大,在8 mm時超限;脫軌系數(shù)在5~9 mm的范圍內(nèi)均未超限。
不平順限值按照各評價指標最不利的情況確定,即軌向動態(tài)不平順10 m弦測值為5 m m時,達到經(jīng)常保養(yǎng)級別;為6 mm時,達到經(jīng)常舒適級別;由于加速度達到Ⅲ級標準時,軌向動態(tài)不平順10 m弦測值為8 mm輪重減載率同時超限,不再設(shè)置舒適度和臨時補修級別,此時動車組以250 km/h的速度運行已不再安全,應(yīng)當限速至160 km/h。
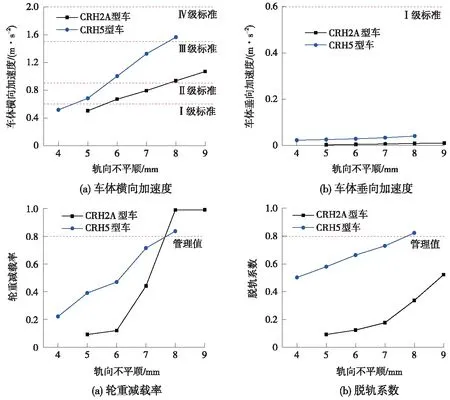
圖5 250 km/h下各軌向不平順評價指標計算結(jié)果
由圖6可以看出,各評價指標均隨不平順的增大而增大。其中,車體橫向加速度和脫軌系數(shù)在高低動態(tài)不平順10 m弦測值為4~10 mm的范圍內(nèi)均未超限;車體垂向加速度在6 mm時超過I級標準,在8 mm時超過II級標準,在10 mm時超過III級標準,在12 mm時超過Ⅳ級標準;輪重減載率在12 mm時超過管理限值;而脫軌系數(shù)在4~12 mm范圍內(nèi)均未超限。
不平順限值按照各評價指標最不利的情況確定,即高低動態(tài)不平順10 m弦測值為6 mm時,達到經(jīng)常保養(yǎng)級別;為8 mm時,達到舒適度級別;為10 mm時,達到臨時補修級別;高低動態(tài)不平順10 m弦測值為12 mm時,動車組以250 km/h的速度運行已不再安全,應(yīng)當限速至160 km/h。

圖6 250 km/h下各高低不平順評價指標計算結(jié)果

圖7 250 km/h下軌向動態(tài)不平順8 mm時各評價指標時程
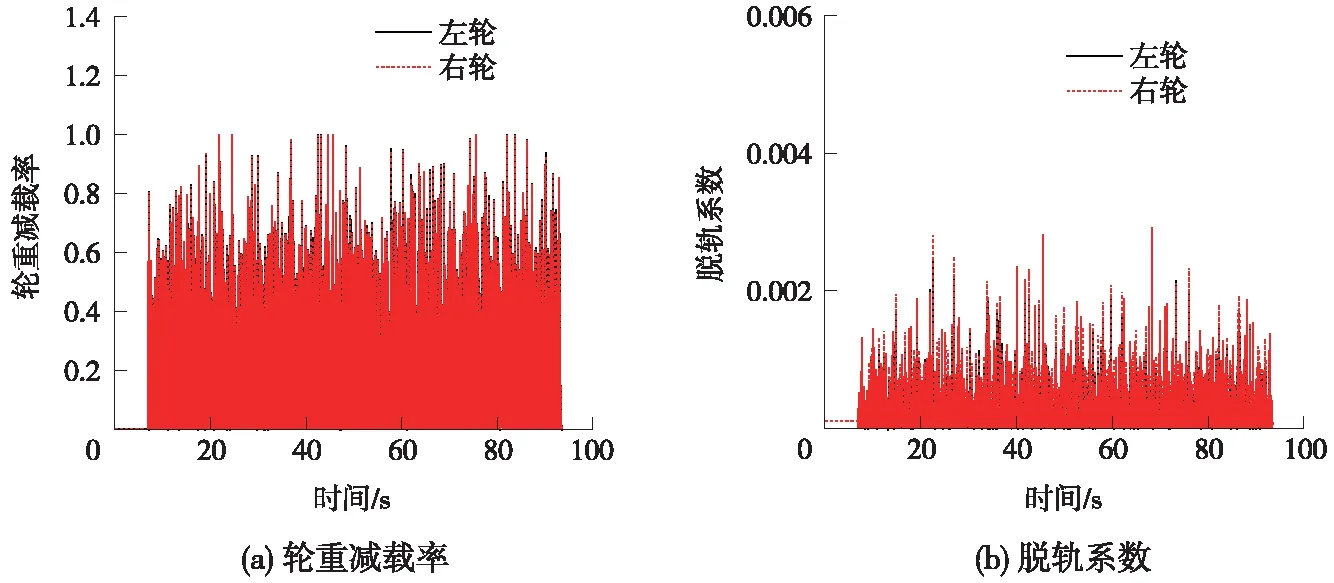
圖8 250 km/h下高低動態(tài)不平順12 mm時各評價指標時程
比較圖5、圖6各評價指標,在速度250 km/h時,無論是在軌向還是高低不平順激勵下,CRH5型車的各項指標大部分都比CRH2A型車的大,說明相同工況下,CRH5型車的動力響應(yīng)比CRH2A型車劇烈。
提取軌向動態(tài)不平順10 m弦測值為8 mm時和高低動態(tài)不平順10 m弦測值為12 mm時(車速250 km/h時,超過安全限值),各評價指標的時程曲線如圖7、圖8所示。可以看出,軌向動態(tài)不平順10 m弦測值為8 mm時,對于輪重減載率和脫軌系數(shù),軌向不平順激勵會產(chǎn)生較多的極大峰值;而高低動態(tài)不平順10 m弦測值為12 mm時,輪重減載率和脫軌系數(shù)較為穩(wěn)定,其中脫軌系數(shù)極大值較軌向不平順工況下小得多。這說明,列車對于橫向的激勵較垂向激勵更為敏感。對于橫向激勵源如軌向不平順、軌距不平順,應(yīng)嚴格控制。
由計算可知,在速度160 km/h下,軌向和高低動態(tài)不平順限值分別為8 mm、12 mm,低于《高速鐵路無砟軌道線路維修規(guī)則》中對速度160 km/h時的容許偏差管理值10 mm、14 mm,說明計算所得限值要嚴于規(guī)范。當線路沒有得到及時維修,隨著不平順的繼續(xù)發(fā)展,限速160 km/h已經(jīng)不能保證列車運行的安全,需要根據(jù)不平順的發(fā)展程度進一步降低限制速度。
為得到進一步限速對應(yīng)的不平順值,取較大的軌向及高低動態(tài)不平順,計算了車速160 km/h時CRH2A型車和CRH5型車在各軌向及高低不平順下的動力響應(yīng),得到各動力學(xué)評價指標,如表1、表2所示。限速160 km/h時,隨著不平順的發(fā)展,對CRH2A型車,當軌向動態(tài)不平順達到11 mm時,輪重減載率為0.938,高低動態(tài)不平順達到15 mm時,輪重減載率為0.818,超過管理值0.8;對CRH5型車,當軌向動態(tài)不平順達到10 mm時,輪重減載率為0.928,超過管理值0.8,高低動態(tài)不平順達到15 mm時,車體垂向加速度為2.528 m·s-2,超過IV級標準。所以當軌向動態(tài)不平順發(fā)展到10 mm,高低動態(tài)不平順發(fā)展到15 mm時,限速160 km/h已不能保證列車的安全運行,應(yīng)進一步限速至120 km/h。
結(jié)合以上分析可知,對于軌向不平順,對限值起控制作用的是輪重減載率和脫軌系數(shù),而車體垂向加速度始終非常小。可見,軌向不平順幾乎沒有對車體造成垂向擾動;對于高低不平順,對限值起控制作用的是車體垂向加速度和輪重減載率,而車體橫向加速度和脫軌系數(shù)非常小。較小的脫軌系數(shù)是由于橫向輪軌力較小。可見,高低不平順幾乎沒有對車體造成橫向擾動。這說明,一個方向上的不平順只會造成同方向的擾動,對其垂直方向的擾動可以忽略不計。

表1 160 km/h CRH2A型車計算評價指標值
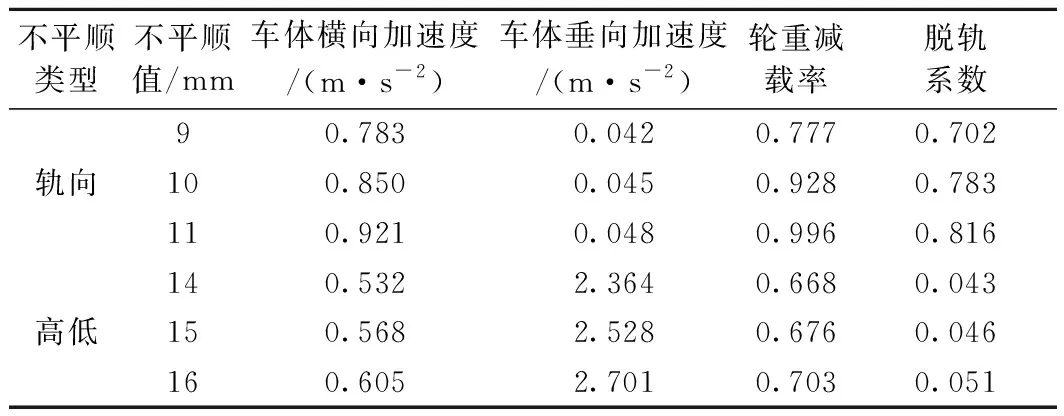
表2 160 km/h CRH5型車計算評價指標值
當不平順繼續(xù)發(fā)展時,需要進一步確定各軌向和高低不平順條件下的限速標準。參考限速120 km/h時的分析方法,分別計算了兩種車型各軌向和高低動態(tài)不平順下的允許運行速度,如圖9所示。軌向和高低動態(tài)不平順值分別為14、18 mm時,應(yīng)限速80 km/h;分別為19、23 mm時,應(yīng)限速40 km/h;分別為30、35 mm時,應(yīng)限速5 km/h。通過對比軌向和高低不平順的計算結(jié)果,可以發(fā)現(xiàn)同等限速等級下,軌向不平順的限值通常要嚴于高低不平順的限值。對于兩種車型的計算結(jié)果,不平順按照最不利情況確定。
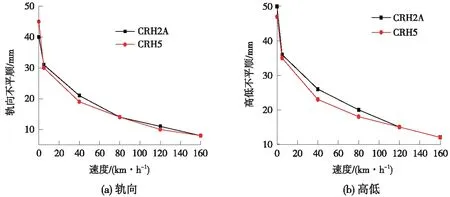
圖9 各速度下不平順限值
通過動力學(xué)仿真計算得到的不平順限值應(yīng)為動態(tài)管理值,由于在實際的不平順測量管理時,難以準確測得動態(tài)不平順值,因此需要利用軌道動靜態(tài)幾何不平順之間的關(guān)系加以轉(zhuǎn)化,得到軌道靜態(tài)幾何尺寸容許偏差管理值。根據(jù)圖1,將計算所得各限制速度下的軌向和高低動態(tài)不平順進行轉(zhuǎn)化,得到動車各組安全運行限制速度下靜態(tài)幾何尺寸限值如表3所示。

表3 動車組安全運行靜態(tài)幾何尺寸限值
4 結(jié)論
(1)通過對比CRH2A和CRH5兩種車型的計算結(jié)果,可以發(fā)現(xiàn)大多數(shù)工況下CRH5型車所確定的不平順限值小于CRH2A型車。這是由于CRH2A型車的結(jié)構(gòu)和參數(shù)更合理,動力學(xué)性能優(yōu)于CRH5型車。
(2)對于軌向不平順,對限值起控制作用的是輪重減載率和脫軌系數(shù)。對于高低不平順,對限值起控制作用的是車體垂向加速度和輪重減載率。軌向不平順主要引起車輛橫向擾動,而高低不平順主要引起車輛垂向擾動,說明方向上的不平順激勵只會對造成同方向的擾動,對其垂直方向的擾動可以忽略不計。
(3)列車對于橫向的激勵較垂向激勵更為敏感。同等限速等級下,軌向不平順的限值通常要嚴于高低不平順的限值。對于橫向激勵源如軌向不平順、軌距不平順,應(yīng)嚴于控制。
(4)通過動力學(xué)仿真計算,得到不同速度等級下的不平順動態(tài)管理值,利用軌道動靜態(tài)幾何不平順之間的關(guān)系轉(zhuǎn)化,得到各速度等級下軌道靜態(tài)幾何尺寸容許偏差管理值,對現(xiàn)有規(guī)范內(nèi)容有一定的補充。