機載雷達修理中的標校技術研究
2018-09-10 07:17:50朱康瓏
航空維修與工程 2018年12期
朱康瓏

摘要:闡述了機載雷達修理中的主要標校工作內容,以及標校技術對機載雷達的戰術、技術指標性能的重要作用,結合修理實例介紹了機電零位誤差標校和光電軸標校的原理和具體方法。
關鍵詞:機載雷達;修理;標校
0引言
機載雷達是用于檢測和定位反射目標的一種電磁系統,通過將能量輻射到空間并且探測由物體或目標反射的回波信號來工作。目標的角度位置可以根據收到的回波信號幅度為最大時由窄波束寬度雷達天線所指的方向而獲得。需要關注的是,雷達天線的實際指向與測角傳感器傳遞給計算機的測量值之間的誤差直接影響機載雷達的探測范圍、探測精度、探測分辨率等重要戰術、技術指標性能。機載雷達的天線指向精度并不是一個固定值,而是時問的函數,尤其是天線經過拆裝或遭受撞擊以后,需要立即進行標校。另外,隨著機載雷達使用時間的增加,在修理時更換的器件日益增多,機械誤差、電參數漂移積累等原因導致的性能指標超差現象時有出現,用戶在使用中也多次反映雷達角跟蹤誤差超標等問題。
為保證機載雷達的工作性能,滿足作戰、訓練要求,需要定期進行機載雷達的機電零位誤差、角跟蹤誤差等參數的標校工作。機載雷達系統標校的一般順序為:先進行天線座機械軸系誤差標校,再進行電氣零位標校,最后進行光電軸標校。不同型號的機載雷達,因為結構、精度和測角元件的不同,具體標校方法存在差異,需要結合雷達說明書確定,但是標校技術原理是一致的。
1機電零位誤差標校
1.1天線座機械軸系誤差標校
天線座重新裝配或進行修理后,需要對機械軸系誤差進行標定,若未能達到規定指標,應進行相應的調整,或對由此誤差造成的雷達系統誤差進行校正,校正的方法有調整電氣零位、調整補償電路等。天線座需要標定的機械軸系誤差通常包括:
a.天線座安裝面的平面度;
b.方位軸與安裝面的平行度;
c.方位軸與俯仰軸的垂直度;
d.方位軸與水平面的垂直度。
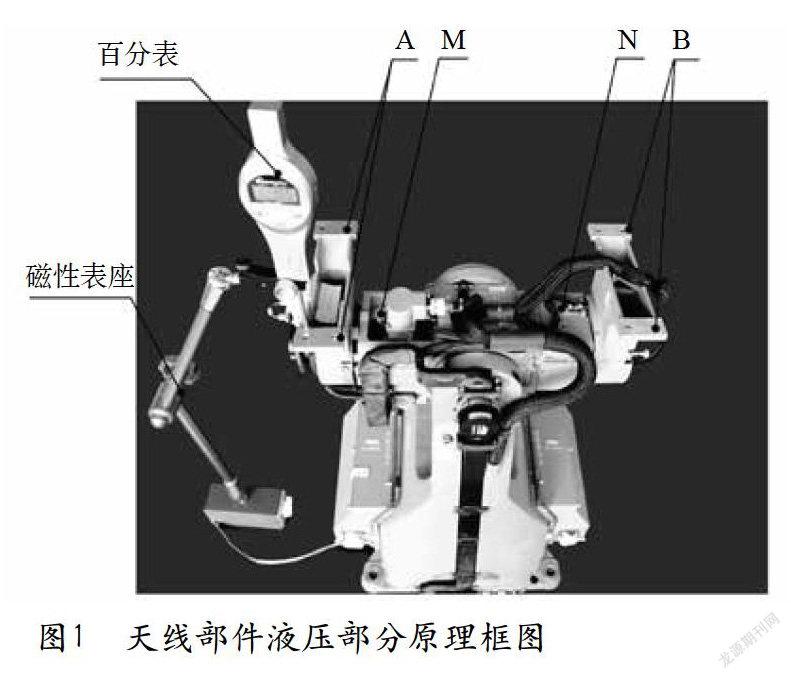
以圖1中的天線座為例,標定機械軸系誤差時,將天線座的安裝底座朝下,放置于經過標校的大理石平臺上。采用大伸縮行程的百分表及調整范圍大于天線座高度的磁性表座,通過測量圖1中A面和B面的高度差得出俯仰方向的平行度,通過測量M面和N面的高度差得出方位方向的平行度。沿方位和俯仰轉軸調整平面,使平行度等形位公差符合設計精度要求。此時,各角度副尺應指向對應角度主尺的零度線,如果偏離,可以擰松角度副尺的固定螺釘進行調整,對準角度主尺的零度刻度線后擰緊固定螺釘,完成機械軸系誤差標校。
1.2電氣零位標校
1)天饋伺單元測角原理
圖2是天饋伺單元角度測量和控制原理框圖。綜合處理機根據工作模式指令,通過伺服放大器控制方位、俯仰驅動單元轉動,實現天線的搜索/跟蹤運動。方位、俯仰旋轉變壓器實時測量天線的方位/俯仰角度值并反饋給綜合處理機,綜合處理機根據當前的電軸指向等參數,計算出目標的位置信息。為了保證對目標位置的測量精度,要求旋轉變壓器的測量值能夠真實反映天線的實際指向,即在機械軸系誤差滿足要求的前提下,天饋伺單元的方位、俯仰刻度標尺指向零(即機械零位)時,方位、俯仰旋轉變壓器的輸出零位精度應符合要求。
2)旋轉變壓器工作原理
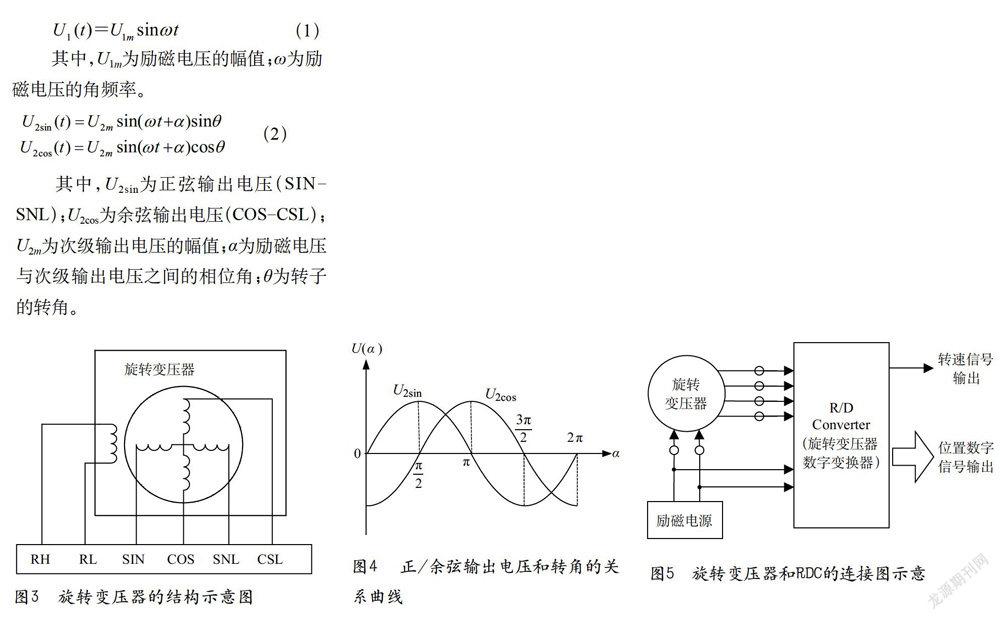
旋轉變壓器是根據互感原理工作的,以某型正余弦旋轉變壓器為例,其結構示意圖如圖3所示。
在圖3中,勵磁繞組RH RL由單相交流電供電,供電電壓可以表示為:
當轉子轉動時,由于勵磁繞組和次級輸出繞組的相對位置發生變化,因而次級輸出繞組的感應電動勢也發生變化,兩組次級輸出繞組在空間上成正交的90°電角度,因而兩組輸出電壓可以表示為:
根據式(1)和式(2)可以發現,勵磁電壓和輸出電壓是同頻率的,但存在著相位差。正弦輸出電壓和余弦輸出電壓是同相位的,但幅值隨轉角分別作正弦和余弦函數變化,如圖4所示。因此,根據信號幅值大小可以獲取旋轉變壓器的角度值,而根據輸出電壓的正負關系可以獲取旋轉方向。
3)電氣零位標校方法
天饋伺單元的電氣零位標校必須在完成機械軸系誤差標校之后進行。將天饋伺單元的方位、俯仰、橫滾方向的機械零位分別調整到允許誤差范圍后,依次測量方位、俯仰、橫滾方向的旋轉變壓器角度值,如果角度誤差大于設計指標,則需要進行電氣零位標校。
測量旋轉變壓器的角度值時,需要先掌握旋轉變壓器的主要參數,包括額定勵磁電壓及勵磁頻率、變壓比、最大輸出電壓、電氣誤差、阻抗、相位移、零位電壓、基準電氣零位等。旋轉變壓器的信號輸出是兩相正交的模擬信號,其幅值隨著轉角做正余弦變化,頻率和勵磁頻率一致,通過角度數據變換電路把模擬量變換成明確的角度量,這就是旋轉變壓器數字變換器(RDc)電路,如圖5所示。
圖5測得的旋轉變壓器的角度值,如果大于設計允許誤差指標,則可以先斷開旋轉變壓器軸端與被測機構的連接,再轉動旋轉變壓器的轉軸,將角度值調整到允許誤差范圍內后,再恢復旋轉變壓器軸端與被測機構的連接。通過上述步驟就完成了電氣零位標校。要注意的是,在恢復旋轉變壓器軸端與被測機構的連接過程中,觀測角度值不應發生變化,否則需要重新進行電氣零位標校。
2光電軸的標校
2.1標校原理
雷達光軸是安裝在雷達上的水準儀十字中心呈現出的遠方目標點與水準儀物鏡中心的虛擬連線。雷達的電軸是當雷達工作在自動跟蹤目標模式下,當角誤差信號為零時,目標點與雷達天線饋源的中心點(天線波瓣軸)之間的虛擬連線。由于雷達的方位角和俯仰角標校是采用光軸瞄準進行的,而雷達在測量和跟蹤目標時,是通過電軸對準目標,因此必須要求雷達的光軸和電軸一致,否則雷達的方位角和俯仰角將產生誤差。可見,在對雷達的方位角和俯仰角進行標校之前,必須先進行光電軸標校。雷達光電軸標校,就是使雷達光軸與電軸互相平行,并且使電軸與雷達俯仰角旋轉軸互相垂直。
2.2標校方法
雷達光電軸標校如圖6所示。矩形喇叭天線距天線前端15~18m。采用標校工裝將激光水準儀準確固定在雷達天線口面的法線上。由于激光水準儀到天線焦點的高度差L是已知的,將校準靶標與矩形喇叭天線的高度差也調整為L。開啟激光照射前方,調整校準靶標的位置,直至與激光焦點重合,則能保證矩形喇叭天線與天線口面的法線對準。
采用天線遠場測試方法進行天線方向圖測試,根據方向圖測試結果進行分析,如果波束的零深處不為0°,則表示雷達光軸與電軸不同軸。光電軸不同軸時,可在調整饋源安裝位置后再進行光電軸標校,直至測得的方向圖波束的零深處為O°,即完成了光電軸的標校。
為了保證測量出準確的角跟蹤誤差值,要求對測量精度進行有效控制,工裝設備的精度應滿足以下要求。
1)水準儀:精度不低于2”。修理中實際采用NAL24R激光水準儀,精度為1.15”,應定期進行計量,保證測量精度。
2)信號源:頻率穩定度優于5×10(-5)。
3)矩形喇叭天線:增益不小于15dB。
4)標校工裝:通過配打與天線固定基座的中心定位孔,保證對中精度。
2.3光電軸標校在故障修理中的應用
以某型振幅和差天線為例,雷達工作時,天線在一個角平面內有兩部分重迭波束1和2,如圖7a)所示。
振幅和差天線取得角跟蹤誤差信號的基本方法,是將這兩個波束同時收到的回波信號進行和差處理,分別得到和信號與差信號。和、差信號相應的和、差波束如圖7的b)和c)所示,其中差信號就是該平面的角跟蹤誤差信號。從圖7a)可以看出,如目標處在天線軸線方向(等信號軸),誤差角為零,則兩波束收到的回波信號振幅相同,差信號為零;如目標偏離等信號軸(誤差角不為零),則兩波束收到的回波信號振幅不同,產生的差信號振幅與誤差角成正比,符號(相位)由目標偏離方向確定。可見,如果圖7a)零深處不為0°,表示光軸與電軸不同軸;如兩個波瓣不對稱,說明比前電壓失衡(由天線光學部分引起)。由此可知,測量天線方向圖可定量分析天線的角跟蹤誤差并分析其原因,便于針對性地調整。雷達天線系統產生角跟蹤誤差的主要原因和修理措施如表1所示。
3結束語
機載雷達標校技術是雷達的核心修理技術,也是保證機載雷達戰術、技術性能指標的重要修理手段。修理實踐表明,本文介紹的機載雷達標校技術具有資金相對投入少、操作工藝簡便等優點,能夠快速發現并排除機載雷達的機電零位誤差、角跟蹤誤差等故障,有效提高了機載雷達修理質量。
