高精度定角脈沖產生方法研究
2018-09-10 15:43:06葉明聶宜云
航空科學技術 2018年12期
葉明 聶宜云


摘要:使用定角測時法進行轉臺速率精度檢測時,定角脈沖信號是關鍵信號,其精度直接影響檢測結果。轉臺現有定角脈沖發生裝置未考慮位置誤差的影響,為此提出一種提高定角脈沖精度的方法,利用位置誤差補償數據對定角脈沖產生的位置進行補償,經驗證方法可行且有效。此方法無論對轉臺速率精度測試還是對與定角脈沖相關的其他測試都具有重要意義。
關鍵詞:定角脈沖;定角測時;速率精度;轉臺
中圖分類號:TP311 文獻標識碼:A
陀螺儀表的測試與標定過程需要轉臺提供高精度速率基準[1],轉臺的速率精度和速率平穩性指標高低直接影響被測試與標定的陀螺儀標的精度[2]。定角的角度信號(簡稱定角脈沖)輸出是轉臺速率性能測試的主要信號,依據GJB1801慣性技術測試設備主要性能試驗方法,轉臺速率精度的試驗方法有兩種(定時測角法和定角測時法[3]),其中定角測時法需要轉臺提供定角脈沖,通過測量定角脈沖之間的時間間隔來標定速率精度和速率平穩性,可見定角脈沖的精度將直接影響速率檢測結果的準確性;另一方面,有些慣性器件的測試過程需要轉臺能夠提供高精度的定角度脈沖輸出用以同步采集其產品的相關數據,進而標定其產品的相關性能。由此可見,提高定角脈沖產生精度無論對轉臺自身的性能測試還是對與定角脈沖相關的其他測試都具有重要意義。
1 原有定角脈沖產生原理
常用的角位移傳感器有感應同步器[4]和碼盤。在基于感應同步器的測角系統中,使用鑒幅方式[5]不便于設計定角脈沖電路,使用鑒相方式[6]可以產生較高精度定角脈沖[7],但隨著碼盤技術的提升和成本的下降,使得碼盤成為主流的角位置傳感器。基于碼盤的定角脈沖生成主要有兩種方式:一種方式是按指定角度間隔換算出碼盤計數值,通過專用計數模塊對走過角度進行計數,當計數值達到指定值時,硬件模塊立即產生定角脈沖輸出,這種實現方式主要應用于以增量式碼盤為角位置傳感器的轉臺系統中,原理框圖如圖1所示。
碼盤的AB信號接入LS7566的相應通道,工作在正交X4計數、模N方式(N的大小可以任意設置,如需要每10°產生一個定角脈沖,N=10°對應的count數),用來產生定角度脈沖,定角度脈沖在相應通道的FLGa上輸出。配置FLGa在“比較”及“借位”上均產生標志脈沖,以滿足正/負兩個方向上產生定角度脈沖。FLGa方式設置為鎖存方式,產生一個定角脈沖,FLGa由高電平跳變到低電平并鎖存在低電平,當清除“比較”及“借位”標志后,FLGa由低電平變到高電平,允許下次脈沖產生。
另一種方式是在定時中斷中依據當前角度實時解算產生定角脈沖,需要額外的硬件模塊支持。具體算法是在定時中斷中檢測當前角度,當角度未達到需要發脈沖的指定角度,而在下一個定時中斷將超過需要發脈沖的指定角度時,計算角度差值和當前速率,解算出延遲發送脈沖的時間,設置延遲發送脈沖硬件模塊,延遲輸出脈沖。這種實現方式主要應用于以絕對式碼盤為角位置傳感器的轉臺系統中。
以上兩種基于碼盤的定角脈沖實現方法均未考慮位置精度誤差因素,產生的定角脈沖存在一定的誤差。
2 高精度定角脈沖產生原理
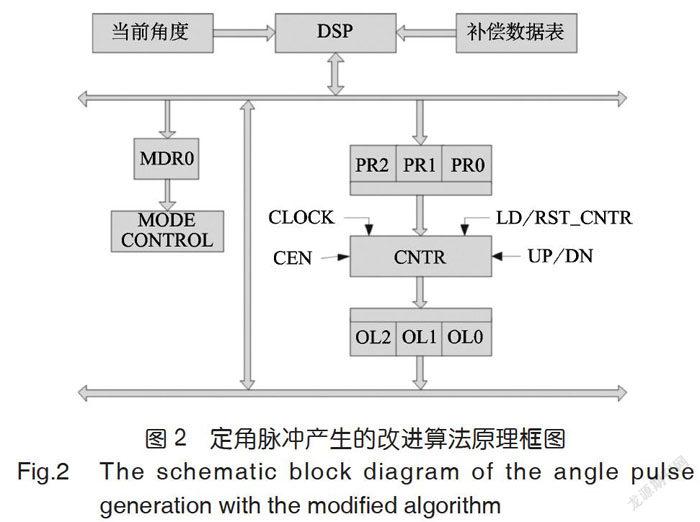
為進一步提高定角脈沖的精度,根據現有技術中的不足,對定角脈沖的生成算法進行了改進,消除位置誤差對定角脈沖精度的影響,原理框圖如圖2所示。
DSP精密運動控制器采用TI公司的TMS320C32芯片作為主控器件,完成數據處理功能,采用LS7566芯片對碼盤脈沖進行計數[8]和產生定角脈沖,兩者之間通過DSP的總線完成數據通信[9]。采用IDT7006雙端口RAM芯片實現DSP精密運動控制器與工控機的通信。與現有定角脈沖產生方式不同的是,算法中增加了兩個輸入模塊,其中,當前角度模塊實現當前角度的實時讀取,補償數據表模塊存放角度位置誤差補償數據,補償數據通過諧波分析的方法確定,將圓周360°均分為36000個補償點,即每個補償步距為0.1°。
DSP精密運動控制器收到定角脈沖啟動命令后,將命令解析并提取出定角度間隔參數值,記錄當前角度值,標記為角度1(如圖3所示),依據定角脈沖間隔值求出下一期望產生定角脈沖的角度值,標記為角度2(如圖3所示),在補償表中查找角度1和角度2各自的左右相鄰角補償值,經一階線性插補算法[10]解算出角度1和角度2的誤差修正值,通過兩個角度誤差修正值求出下一個定角脈沖產生位置需要走過的修正后的角度計數值,標記為定角間隔修正計數值,將此值寫入計數模塊LS7566的PR寄存器,當計數模塊計數達到定角間隔修正計數值時產生定角脈沖輸出。
3 試驗驗證
將此定角脈沖產生方法應用在920E型單軸位置速率轉臺上,進行了0.1(°)/s,0.5(°)/s,1.0(°)/s,5.0(°)/s,50.0(°)/s速率精度測試,測試結果見表1,繪制曲線如圖4所示。
按國軍標GJB1801要求,速率V<1(°)/s使用1°定角脈沖,1(°)s≤V<10(°)/s使用10°定角脈沖,V≥10(°)/s使用360°定角脈沖。經過對測試數據的分析,在50(°)/s速率精度測試時,兩種算法的測試結果相近,這是因為該速率點使用360°定角脈沖,兩種算法都不受系統綜合位置誤差影響,而在其他非整圈定角脈沖的測試中,都得到了較好的效果。
4 結論
本文論述的采用對定角度間隔按絕對角度進行誤差補償的方法,由硬件計數并產生定角脈沖,消除了系統綜合位置誤差對定角脈沖精度的影響,提高了定角脈沖精度,在轉臺的角速率精度檢測以及與定角脈沖相關的其他測試方面都具有重要意義。
參考文獻
[1]楊亞非,張翔.帶有慣性敏感元件的新型陀螺測試轉臺系統建模[J].中國慣性技術學報,2013,21(6):834-839.
[2]劉樾,李亞軍.慣導測試與運動仿真技術的特點與發展[J].航空精密制造技術,2008,44(6):1-6.
[3]沈宗廉,張麗珠,虞家云,等.GJB1801-1993慣性技術測試設備主要性能試驗方法[S].北京:國防科工委軍標出版發行部,1994.
[4]陸永平,岑文遠.感應同步器及其系統[M].北京:國防工業出版社,1985.
[5]秦寶艷.一種新的測角電路的設計與實現[C]//中國慣性學會測試專業委員會第十次學術交流會,2007.
[6]姜復興,龐志成.慣導測試設備原理與設計[M].哈爾濱:哈爾濱工業大學出版社,1998.
[7]陳杰.速率檢測中新型定角脈沖產生電路[J].航空精密制造技術,2008(3):29-32.
[8]LSI/CSI.LS7566 24 bit four-axes quadrature counter[EB/OL].2005.http://mhtml.alldatasheet.com/html-pdf2/184490/LSI/LS7566/53/1/LS7566.htm1?lang=en.
[9]TI.TMS320C32 digital signal processor SPRS027C[EB/OL].1995.http://mhtml.alldatasheet.com/html-pdf2/29037/TI/TMS320C32/23/1/ TMS320C32.htm1?lang=en.
[10]葉明,陳杰,李建平一種基于DSP的嵌入式測角系統的設計與實現[C]//中國慣性技術學會第七屆學術年會,2015.