3GP-160自走式果園作業(yè)平臺(tái)設(shè)計(jì)與試驗(yàn)
2018-09-07 08:54:28何建華王鵬飛劉俊峰
江蘇農(nóng)業(yè)科學(xué) 2018年16期
何建華, 楊 欣, 王鵬飛, 劉俊峰
(河北農(nóng)業(yè)大學(xué)機(jī)電工程學(xué)院,河北保定 071001)
隨著農(nóng)業(yè)產(chǎn)業(yè)結(jié)構(gòu)的調(diào)整,林果業(yè)種植越來越受到重視,果園管理機(jī)械化的需求也越來越迫切。果園平臺(tái)的應(yīng)用改善了直接使用人字梯徒手攀爬果樹進(jìn)行作業(yè)帶來的危險(xiǎn)性[1-4]。針對(duì)現(xiàn)代新型矮砧密植新型果園行距標(biāo)準(zhǔn)和株高較低等特點(diǎn),課題組已開發(fā)了履帶式、多級(jí)剪叉輪式作業(yè)平臺(tái)和高地隙果園動(dòng)力底盤,能夠在果園特殊環(huán)境中實(shí)現(xiàn)疏花、修剪、采摘和果品運(yùn)輸?shù)茸鳂I(yè)需求[5-8]。在筆者所在課題組已研發(fā)果園作業(yè)平臺(tái)的基礎(chǔ)上,對(duì)輪式平臺(tái)進(jìn)行了優(yōu)化,采用了一級(jí)剪叉機(jī)構(gòu),增加了剎車功能,改變了操縱形式,加高了平臺(tái)防護(hù)欄,以期提升平臺(tái)升降穩(wěn)定性,保證制動(dòng)即時(shí)性,提高操縱方便性,減輕運(yùn)輸勞動(dòng)強(qiáng)度,提高安全保障。
1 設(shè)計(jì)要求及總體結(jié)構(gòu)原理
1.1 設(shè)計(jì)要求
適應(yīng)現(xiàn)代矮砧密植新型果園,符合蘋果生產(chǎn)中的疏花、采摘、修剪等作業(yè)要求。(1)能夠適應(yīng)現(xiàn)代矮砧新型果園地形。行駛速度為 0.1~6.5 km/h;變速器為無級(jí)變速。(2)載人工作臺(tái)可提升高度為0~1.15 m。(3)升降平穩(wěn),可即時(shí)制動(dòng)。
1.2 總體結(jié)構(gòu)與工作原理
3GP-160自走式果園作業(yè)平臺(tái)主要由操控系統(tǒng)、剎車系統(tǒng)、載人平臺(tái)、升降系統(tǒng)和行走系統(tǒng)等結(jié)構(gòu)組成,如圖1所示。操控系統(tǒng)由方向盤、顯示屏和控制按鈕等組成;剎車系統(tǒng)主要由剎車油壺、剎車腳踩板及相關(guān)聯(lián)的液壓系統(tǒng)組成;載人平臺(tái)可整體升降,主要分為3個(gè)部分,分別為左右和中間平臺(tái),左右平臺(tái)可向兩側(cè)伸展,主要由伸展液壓油缸、支撐矩管、支撐板組成,中間平臺(tái)主要由支撐矩管、支撐板組成,平臺(tái)上加裝護(hù)欄;升降系統(tǒng)主要由一級(jí)剪叉機(jī)構(gòu)、升降油缸和泵站組成;行走系統(tǒng)主要由前橋、后橋、無級(jí)變速器和液壓系統(tǒng)組成。
工作時(shí),司機(jī)和工作人員直接站立載人平臺(tái)上操控機(jī)器,通過液壓系統(tǒng)驅(qū)動(dòng)無級(jí)變速器帶動(dòng)輪式行走系統(tǒng)行走,到達(dá)工作位置后,搬回行走手柄,踩下剎車,確保機(jī)器停到準(zhǔn)確位置,通過控制升降油缸升降來調(diào)整平臺(tái)高度,以適應(yīng)不同高度的工作位,通過控制伸展油缸左右伸展,來適應(yīng)不同的橫向采摘位置。

1.3 主要技術(shù)參數(shù)
選取蘋果樹為研究對(duì)象,主要針對(duì)現(xiàn)代新型矮砧密植果園的栽植模式,新型果園的株行距2 m×4 m,株高3.5~4 m,枝展1.5 m左右,行內(nèi)通道1.8~2.5 m(圖2),果樹向兩側(cè)伸展較小,地頭預(yù)留空地。樣機(jī)設(shè)計(jì)參考新型果園使用要求,確定自走式果園作業(yè)平臺(tái)的主要參數(shù)如表1所示。
2 關(guān)鍵部件的設(shè)計(jì)
2.1 輪式行走系統(tǒng)
現(xiàn)代新型果園,地勢(shì)較平坦,無較大起伏,采用農(nóng)用輪式底盤可在滿足作業(yè)要求的前提下,節(jié)約成本,提高作業(yè)效率。行走系統(tǒng)如圖3所示,主要包括后橋、無級(jí)變速器、機(jī)架、水箱、發(fā)動(dòng)機(jī)、前橋,通過液壓系統(tǒng)實(shí)現(xiàn)無級(jí)變速,以滿足不同作業(yè)速度要求。


表1 3GP-160自走式果園作業(yè)平臺(tái)設(shè)計(jì)參數(shù)
2.2 一級(jí)剪叉機(jī)構(gòu)
平臺(tái)升降系統(tǒng)主要靠一級(jí)剪叉機(jī)構(gòu)進(jìn)行調(diào)節(jié),如圖4所示,它主要由升降油缸下連接板、升降油缸、升降油缸上連接板、剪叉臂、滾動(dòng)軸承銷軸、滾動(dòng)軸承和中間銷軸等結(jié)構(gòu)組成。
為保證平臺(tái)升降高度滿足作業(yè)要求,且平臺(tái)具有穩(wěn)定的升角,對(duì)剪叉臂長(zhǎng)進(jìn)行了設(shè)計(jì),如圖5所示。

設(shè)一級(jí)剪叉最大起升高度為H,剪叉臂長(zhǎng)為L(zhǎng),最大起升角為θ,軸承滾動(dòng)距離為B,則
sinθ=H/L;
(1)
cosθ=(L-B)/L。
(2)
一般剪叉最大起升角為30°~50°[5],為保證平臺(tái)舉升穩(wěn)定性,并盡可能地減少整機(jī)長(zhǎng)度,選最大升角為40°,由表1可知H=1.15 m,代入式(1)、式(2)得剪叉臂長(zhǎng)度L=1.788 m,B=0.418 m。
2.3 載人平臺(tái)
設(shè)計(jì)載人平臺(tái)時(shí),考慮果園行距、蘋果運(yùn)輸方便性和工作人員安全性,應(yīng)避免工作人員跌落,具體結(jié)構(gòu)如圖6所示。平臺(tái)主要由平臺(tái)底板、護(hù)欄和護(hù)欄圍板等結(jié)構(gòu)組成,其中護(hù)欄圍板可防止工具掉落,平臺(tái)底板工作表面可防滑;護(hù)欄后側(cè)留有足夠空間,以方便工作人員上下;為保證作業(yè)人員的安全性和操作方便性,設(shè)計(jì)護(hù)欄高度時(shí),考慮了工作人員的高度和手伸空間等因素。載人平臺(tái)主要尺寸及參數(shù)見表2。
平臺(tái)底板可左右伸縮,如圖7所示,它主要由伸縮板支架、油缸活塞桿固定座、伸縮油缸、伸縮板、伸縮用軸承、缸管本體固定座等結(jié)構(gòu)組成。平臺(tái)載工作人員左右伸縮時(shí),應(yīng)具有足夠的強(qiáng)度。平臺(tái)伸出長(zhǎng)度將影響其安全系數(shù),為此,須確定油缸伸縮長(zhǎng)度,以保障人員的安全。


表2 載人平臺(tái)設(shè)計(jì)參數(shù)

3 伸縮長(zhǎng)度確定
平臺(tái)左右伸縮為典型的懸臂梁結(jié)構(gòu),應(yīng)保證工作人員在平臺(tái)伸展到最遠(yuǎn)處位置工作時(shí)的安全性,為確定平臺(tái)左右伸縮的安全長(zhǎng)度,對(duì)懸臂梁結(jié)構(gòu)進(jìn)行了有限元分析。如圖8所示,在AIP(Autodesk Inventor Professional)軟件中構(gòu)建第50百分位假人模型,其中一人為司機(jī)兼職工作人員,左右兩側(cè)各站2人,負(fù)責(zé)采摘和修剪等作業(yè)過程,以模仿實(shí)際作業(yè)時(shí)平臺(tái)上的作業(yè)環(huán)境。通過模擬平臺(tái)伸縮來確定最佳安全系數(shù),從而確定平臺(tái)左右最佳伸長(zhǎng)長(zhǎng)度,以期在滿足作業(yè)要求的同時(shí),保證平臺(tái)處在伸縮工作狀態(tài)時(shí)具有足夠的可靠性。
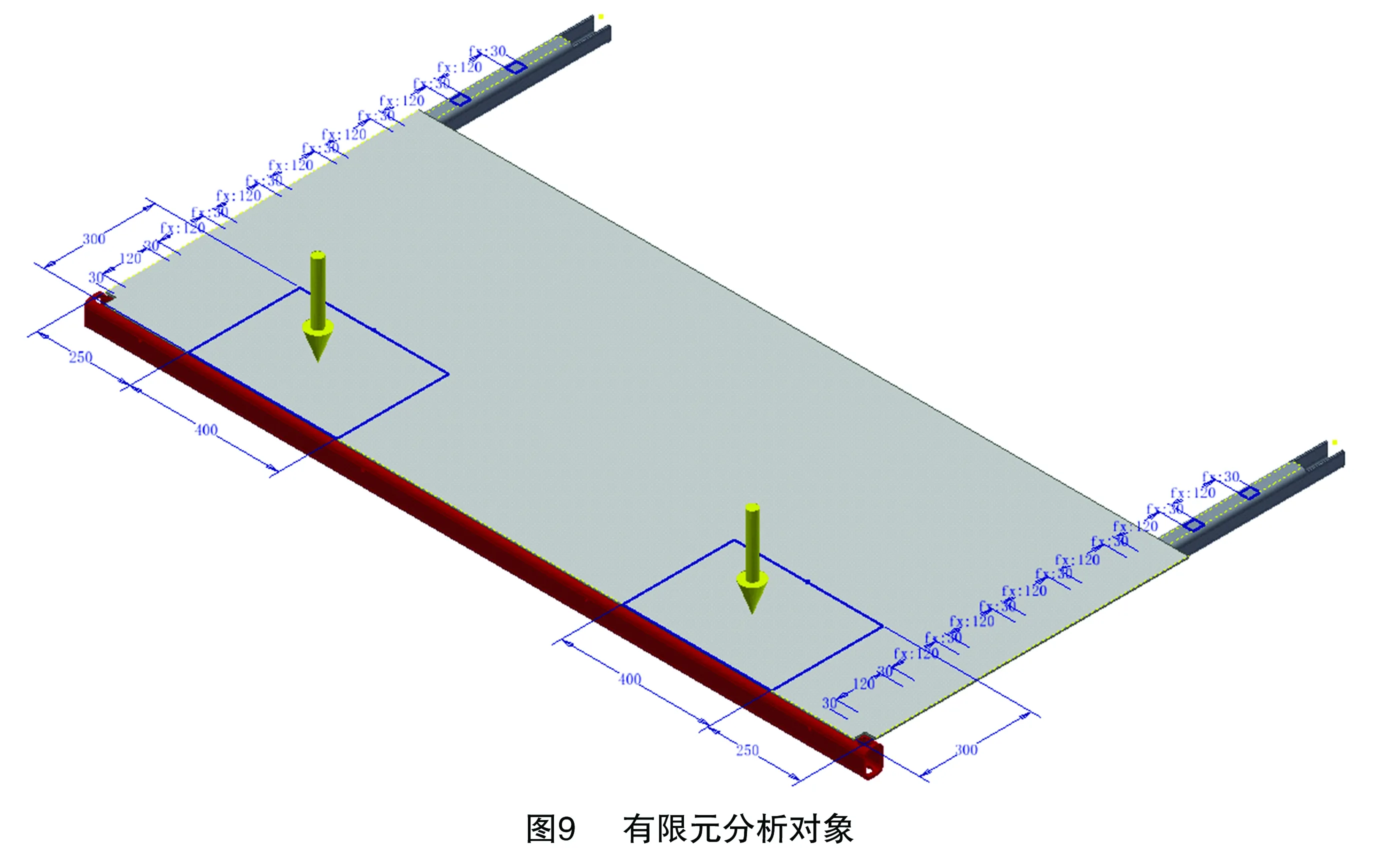
在不影響計(jì)算精度的前提下,對(duì)模型進(jìn)行簡(jiǎn)化,以減少軟件計(jì)算時(shí)間。如圖9所示,將右側(cè)伸平臺(tái)作為有限元分析對(duì)象,兩側(cè)矩管上表面被分割成15個(gè)面,其中7個(gè)等分面為固定約束面,不同的等分面代表右側(cè)平臺(tái)伸出的不同長(zhǎng)度,力的大小根據(jù)站在右側(cè)伸平臺(tái)上工作人員的數(shù)量及工作狀態(tài)來確定。由圖8可知,有2個(gè)工作人員站在右伸平臺(tái),且平臺(tái)配備果箱,經(jīng)過計(jì)算,可得受力面的受力大小約為1 800 N,這里取重力加速度為9.8 m/s2,方向?yàn)樨Q直向下,并將力作用在平臺(tái)前后 0.4 m×0.3 m 的2 個(gè)工作人員作業(yè)區(qū)域。選矩管和鋼板材料為Q235A,其屈服極限為235 MPa,強(qiáng)度極限為 500 MPa,初始鋼管規(guī)格為50 mm×50 mm×4 mm,進(jìn)行有限元分析后,得到變形、安全系數(shù)和等效應(yīng)力隨右伸平臺(tái)伸出長(zhǎng)度的變化趨勢(shì)如圖10所示。


矮砧密植果園栽植模式的行距為4 m,參考GB10000—1988中國(guó)成年人人體尺寸基礎(chǔ)數(shù)據(jù)可知,P10百分位人體手伸為0.514 m,因此,為保證工作人員能夠順利對(duì)果樹主干進(jìn)行作業(yè),要求平臺(tái)左右伸展長(zhǎng)度為0.765 m左右。由圖10可知,右伸平臺(tái)伸出長(zhǎng)度越長(zhǎng),等效應(yīng)力越大,安全系數(shù)越小,當(dāng)矩管伸出長(zhǎng)度為0.765 m時(shí),安全系數(shù)為0.83,小于1,等效應(yīng)力為283.5 MPa,大于屈服極限,不滿足設(shè)計(jì)要求。依據(jù)分析結(jié)果,對(duì)結(jié)構(gòu)進(jìn)行多次調(diào)整,最終確定矩管厚度增加到 7 mm,材料改為20#鋼,改進(jìn)后的應(yīng)力分析結(jié)果如圖11所示,由此可確定平臺(tái)左右可伸縮長(zhǎng)度范圍為0~0.765 m,從而確定油缸的最大伸出長(zhǎng)度為0.765 m。

4 樣機(jī)試制與果園試驗(yàn)
2016年6月下旬,河北中農(nóng)博遠(yuǎn)農(nóng)業(yè)裝備有限公司對(duì)樣機(jī)進(jìn)行了試制,并定型為3GP-160;在保定市順平現(xiàn)代矮砧密植示范園進(jìn)行樣機(jī)試驗(yàn),如圖12所示。試驗(yàn)結(jié)果顯示,樣機(jī)外形尺寸適應(yīng)新型果園栽植模式,操作簡(jiǎn)單,無干涉現(xiàn)象,載人平臺(tái)可升降并定位至不同高度,左右伸縮平臺(tái)可到達(dá)不同的橫向工作位,行駛平穩(wěn),具備良好的斜坡制動(dòng)功能,可滿足摘果和修剪等作業(yè)要求。

5 結(jié)論
本研究設(shè)計(jì)制造了一種針對(duì)現(xiàn)代新型矮砧密植果園栽植模式的自走式果園作業(yè)平臺(tái),經(jīng)過檢測(cè)和果園試驗(yàn),反映了以下特征:
(1)樣機(jī)外形尺寸較小、結(jié)構(gòu)緊湊、操控簡(jiǎn)便,試驗(yàn)測(cè)得其行駛速度為0.1~6.5 km/h,可升降高度為0~1.15 m,基本滿足設(shè)計(jì)要求,適應(yīng)于現(xiàn)代矮砧密植果園作業(yè)環(huán)境。
(2)對(duì)兩側(cè)伸展平臺(tái)施加實(shí)際作業(yè)工況下的載荷條件和邊界約束等邊界條件,進(jìn)行有限元三維應(yīng)力計(jì)算,確定了油缸伸縮長(zhǎng)度為0.765 m。
(3)果園試驗(yàn)表明:設(shè)計(jì)的自走式果園作業(yè)平臺(tái)升降穩(wěn)定,行駛平穩(wěn),可伸出至橫向工作位,具備即時(shí)制動(dòng)功能,滿足現(xiàn)代新型果園作業(yè)要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30

- 江蘇農(nóng)業(yè)科學(xué)的其它文章
- 基于流程的豬肉供應(yīng)鏈透明度評(píng)價(jià)指標(biāo)體系
- 農(nóng)業(yè)保險(xiǎn)對(duì)農(nóng)業(yè)技術(shù)效率影響的差異性分析
——基于動(dòng)態(tài)面板數(shù)據(jù)的GMM估計(jì) - 基于熵權(quán)-灰色TOPSIS方法的農(nóng)產(chǎn)品綠色物流發(fā)展評(píng)價(jià)研究及應(yīng)用
- 養(yǎng)殖戶綠色運(yùn)營(yíng)模式影響因素分析
——基于湖北省規(guī)模養(yǎng)豬戶調(diào)查 - 基于多因素綜合評(píng)價(jià)法的河南省農(nóng)村居民點(diǎn)整理潛力測(cè)算
- 基于共詞聚類分析的農(nóng)村土地法律問題熱點(diǎn)研究