一種改進粒子群的工業機器人時間最優軌跡規劃算法
2018-09-07 01:33:20王玉寶王詩宇李備備郭放達
小型微型計算機系統 2018年8期
王玉寶,王詩宇,李備備,郭放達
1(中國電子科學研究院,北京 100043) 2(中國科學院大學,北京 100049) 3(中國科學院 沈陽計算技術研究所,沈陽 110168) 4(東北大學 計算機科學與工程學院,沈陽 110819) E-mail:wangshiyu@sict.ac.cn
1 引 言
智能制造已經成為時代發展的一部分.機器人是智能制造不可缺少的一部分,隨著智能化的升級,對機器人提出了更高的要求,不僅要求機器人有更高的效率,還要求機器人工作性能的穩定.運動軌跡使機器人工作的重要組成部分,成為近幾年研究的熱點問題.論文中選取軌跡運動時間作為優化對象,基于改進粒子群算法完成對機器人時間最優軌跡規劃.
常用的機器人時間最優軌跡規劃[1,2]有遺傳算法[3,4]和粒子群算法[5-9].其中,大多數軌跡時間優化問題采用遺傳算法,部分采用粒子群算法.采用粒子群算法進行的研究雖然較少,但是也有一定的研究基礎,論文中采用的動態學習因子粒子群算法正是在普通粒子算法優化的基礎上展開的.
論文中選用PUMA560型關節機器人[10]作為研究對象,實驗將以該款機器人的參數為準進行實驗設計.論文中研究機器人點到點之間的軌跡.通過改進粒子群算法完成對時間的優化,找出時間最優運動軌跡.實驗證明,改進粒子群算法動態調整粒子群算法中學習因子的取值,使群體在迭代初期能以較短時間搜索到最優值,迭代后期能夠快速準確收斂到最優解.實驗證明算法在機器人時間最優軌跡規劃中得到很好的應用,顯著提高了搜索精度,表明了模型和算法的有效性.
2 高次多項插值運動軌跡模型
為了保證機器人關節運動的平滑性,至少需要對運動位置R(t)施加至少四個約束條件,即初始時刻位置、終點時刻位置、初始時刻速度及終點時刻位置,這四個約束條件可以唯一確定一個三項多項式模型:
R(t)=a3t3+a2t2+a1t+a0
(1)
當需要引入加速度約束時,此時便需要用一個五次項多項式模型進行插值:
R(t)=a5t5+a4t4+a3t3+a2t2+a1t+a0
(2)
本文采用3-5-3高次多項插值的運動模型.高次多項插值的運動模型的核心在于將機器人運動軌跡分為三個區間,求取通過這三個區間對應時間最短的運動軌跡.假設機器人關節通過三個區間的運動位置分別為R1(t1)、R2(t2)、R3(t3),機器人關節在經過三個區間所用的時間分別為t1、t2、t3.則運動時間和運動軌跡之間的關系如式(3)-式(5):
(3)
(4)
(5)
通過式(3)-式(5)可以得出速度和加速度公式,將位置、速度和加速度公式聯合可以求得高次多項式的參數.從而確定滿足機器人運動軌跡的高次多項式.
3 簡化粒子群算法模型
基本粒子群算法采用的是“速度-位置”的搜索模型來解決優化問題.每一個粒子均可以看作是解空間里面的一個潛在解,并通過解的適應值來決定該解的好壞.基本粒子群算法在初期具有較快的收斂性能,但隨著粒子的同一化過程,往往容易陷入到局部最優.
為了取得全局最優解,胡旺等[11]人舍棄了粒子速度參數,進而改進了由粒子速度因素引起的迭代后期收斂速度及精度的降低的問題,但其沒有考慮不同階段學習因子的取值影響.本文在此基礎上,根據不同迭代階段,動態地調整學習因子,使粒子群避免在初期快速聚集階段陷入局部最優,在全局進行大范圍搜索的同時,保證在搜索后期也能快速找到全局最優解,動態的調節控制迭代前期的學習因子c1和后期的學習因子c2.
4 一種改進粒子群的時間最優軌跡
為了對關節型工業機器人進行時間最優軌跡規劃,需要對粒子參數進行優化,求出各個粒子的最優解,從而獲得整個優化過程的最優解.如上一節所,定義工業機器人關節通過各個區間的時間為分別為t1、t2、t3,隨機取一組時間組合(t1,t2,t3)作為時間粒子參數,之后再隨機取得多組時間粒子組合.式(6)所示θ(t)為時間粒子參數的表示函數:
θ(t)=min|t1+t2+t3|
(6)
通過式(6)中的時間粒子參數函數,我們可以計算出每組時間粒子參數的適應度.時間粒子參數的局部和全局最優解需要根據公式(7)-式(11)和公式(6)共同計算比較獲得:
v[m]=w*v[m]+c1*r1*(pBest[m]-present[m])+c2*r2*(pBest[m]-present[m])
(7)
present[m]=present[m]+v[m]
(8)
W=Wmax-(Wmax-Wmin)*(n/N)
(9)
(10)
(11)
本算法中學習因子采用動態變化的學習因子,使用式(10)和式(11)確定學習因子.全局學習因子隨著搜索次數的增加逐漸減小,局部學習因子隨著搜索次數的增加而增加.通過動態變化學習因子使得搜索前期快速到達全局最優,而后期快速到達局部最優,提高了搜索效率,也改善了結果出現局部最優解不足.
5 實 驗
5.1 實驗設計
實驗設計基于PUMA560進行,PUMA560是一款六自由度的機器人,關于該款機器人的相關信息可以通過文獻[10]了解.通過對PUMA560型進行詳細的運動學分析,使用MATLAB仿真工具箱進行仿真實驗設計.
為了確保機器人末端抓手可達笛卡爾空間坐標,對機器人進行正向運動學求解,得到其起點的空間坐標位置和終點的空間坐標位置.得到機器人起點位置和終點位置后,再調用MATLAB中機器人庫函數ctraj()求出兩個插入點.最終獲得機器人運動軌跡的三個區間及四個路徑點,如表1所示.
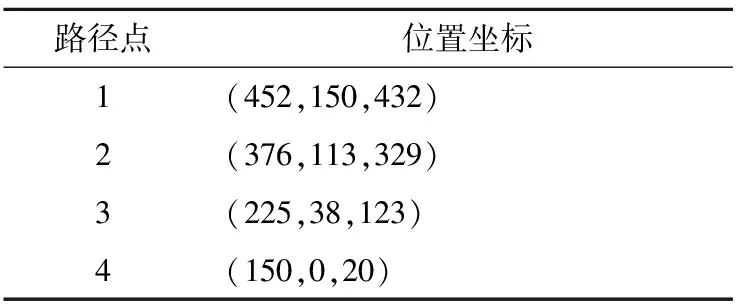
表1 機器人末端運行軌跡坐標Table 1 Running track coordinates of robot end
通過笛卡爾空間坐標點逆解求得各個關節運動的位置,其中三個機器人關節對應的四個路徑點空間位置關系如表2所示.
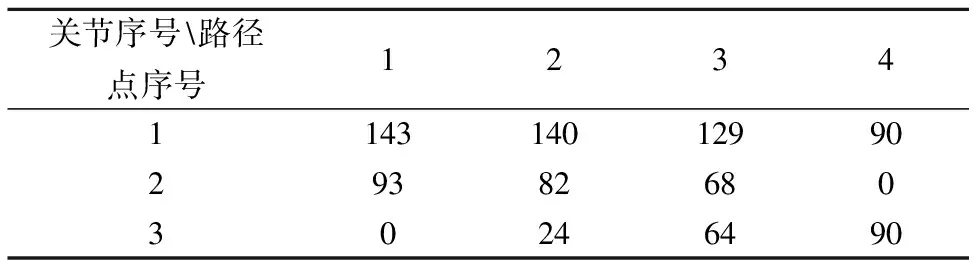
表2 路徑點對應的關節解Table 2 Joint solution corresponding to the path point
實驗過程中不僅需要考慮到粒子群算法中設置的條件,還要考慮工業機器人工作的常規條件,不能超出機器人工作的正常范圍.根據公式(1)-公式(3)可以求出速度公式,利用速度公式可以驗證是否滿足式子(10)設定的約束條件.
(12)
優化過程,首先從二十組粒子中通過比較適應度值獲取全局最優粒子.通過N次迭代不斷更新粒子,計算出添加了約束條件后的最優解粒子,該粒子即為最優時間粒子.
5.2 實驗驗證與結果分析
實驗中對機器人各個關節加入速度和加速度約束,通過簡化粒子群算法模型進行實驗得到如下結果,改進粒子群算法的優化時間收斂圖如圖1所示.從圖中可以看出,在實驗過程初期階段,粒子群體能夠在較短時間內搜索到最優的值,同時也能保證在后期快速準確的收斂到最優解.

圖1 時間收斂與迭代次數變化關系圖Fig.1 Relationship between time convergence and iteration number
基于動態調整學習因子的粒子群算法完成優化,以機器人其中一個關節為例得出優化后的結果,并將未經過優化的關節時間解作為比較值同優化后的結果進行比較.
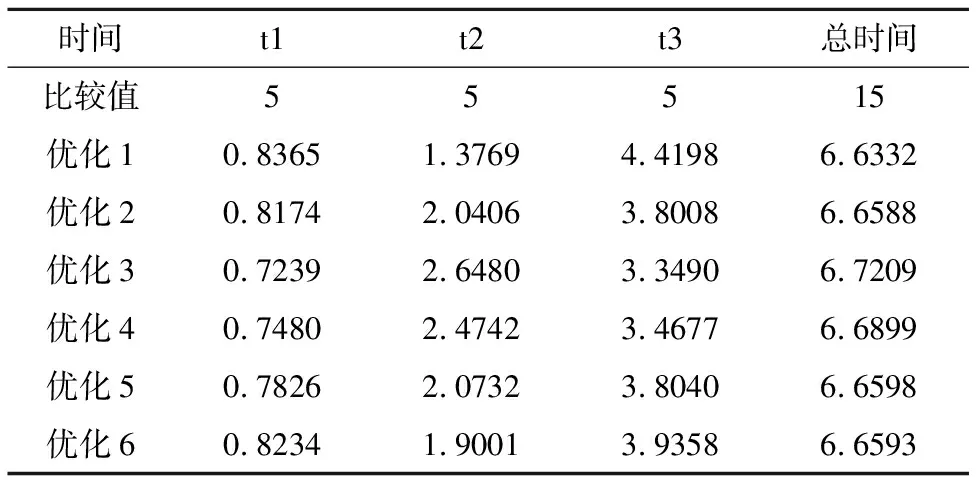
表3 優化結果Table 3 Optimization results
分析表3中的數據可以看出優化前和優化后有明顯差距,優化前需要15秒才能完成,優化后只需要6.7秒左右就可以完成.軌跡運動時間縮短了約50%.達到了預期的目的.
圖2(a)所示為沈陽高精數控公司研發的6軸通用型關節機器人LT-JRB03,其具有最大532mm的工作半徑,能夠負載3公斤的重量.該款機器人具有良好的運動性能,目前已經廣泛運用于搬運、分揀及機床上下料等多個工業生產應用.
圖2(b)所示為JRB03型關節機器人配套的控制器及示教器,將優化算法運用到圖2(b)所示的實際機器人控制器中,圖2(a)所示的機器人能夠完成預期的運動軌跡.此外,基于Matlab的仿真實驗及實際機器人環境運行均驗證了本文提出的改進粒子群算法在工業機器人運動軌跡時間優化問題中的可行性.
將優化算法運用到圖2(b)所示的實際機器人控制器中,圖2(a)所示的機器人能夠完成預期的運動軌跡.證明了本文所提算法的可行性.
圖2 工業機器人及其控制器Fig.2 Industrial robot and its controller
6 總結與展望
本文采用簡化粒子群模型與高項式插值模型對粒子群算法學習因子進行動態調節,進而對工業關節型機器人軌跡規劃進行時間性能上的優化,軌跡運動時間縮短了約50%,達到了預期的優化目的.與其他算法相比,論文中設計的算法不僅結構簡單、易于實現,并且能夠能在較短時間內快速搜索到最優值和快速準確收斂到最優解.結果表明,論文中的算法模型能夠完成對機器人運動軌跡的優化和實際性能的改善.
論文基于動態變化學習因子的改進粒子群算法完成了預期優化,但是還有需要深入研究和探討的部分.如如何確定關節運動速度能夠使收斂速度更快,時間更短;約束速度和加速度在什么條件下能夠使軌跡運動時間更短等都是下一步可以研究的內容.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03