二次成像型庫(kù)德式激光通信終端粗跟蹤技術(shù)
2018-09-03 02:58:00張家齊張立中董科研李小明
中國(guó)光學(xué) 2018年4期
關(guān)鍵詞:模型
張家齊,張立中,董科研,王 超,李小明
(1.長(zhǎng)春理工大學(xué) 空間光電技術(shù)國(guó)家地方聯(lián)合工程研究中心,吉林 長(zhǎng)春 130022;2.長(zhǎng)春理工大學(xué) 空地激光通信技術(shù)國(guó)防重點(diǎn)學(xué)科實(shí)驗(yàn)室,吉林 長(zhǎng)春 130022;3.長(zhǎng)春理工大學(xué) 機(jī)電工程學(xué)院,吉林 長(zhǎng)春 130022)
1 引 言
根據(jù)我國(guó)航天裝備體系發(fā)展規(guī)劃,未來(lái)將建成“天上三網(wǎng)、地面一網(wǎng)、天地組網(wǎng)”的天地基信息網(wǎng)絡(luò)體系。作為骨干網(wǎng)之一的信息傳輸網(wǎng)絡(luò),需要具備高速率的數(shù)據(jù)傳輸能力,傳統(tǒng)微波通信已經(jīng)無(wú)法滿足需求。激光通信具有傳輸速率高、保密性好、抗干擾能力強(qiáng)以及終端體積小、重量輕、功耗低等優(yōu)勢(shì),是解決高速率傳輸?shù)挠行侄巍1疚囊孕情g激光通信相干接收體制為技術(shù)手段,展開(kāi)通信距離大于45 000 km、通信速率為5 Gbps的星間激光通信演示驗(yàn)證試驗(yàn),為將來(lái)實(shí)現(xiàn)高速率激光通信網(wǎng)奠定技術(shù)基礎(chǔ)[1-2]。
常用的激光通信終端有兩種形式:十字跟蹤架結(jié)構(gòu)和潛望鏡式結(jié)構(gòu)。這兩種結(jié)構(gòu)各有優(yōu)缺點(diǎn),十字跟蹤架結(jié)構(gòu)在相同口徑的前提下運(yùn)動(dòng)包絡(luò)更小,但整個(gè)光學(xué)負(fù)載都位于俯仰軸上,負(fù)載重量大,后續(xù)子光路隨負(fù)載運(yùn)動(dòng)穩(wěn)定性差。而潛望鏡結(jié)構(gòu)后續(xù)子光路安裝在基座部分相對(duì)于基座靜止不動(dòng),光學(xué)穩(wěn)定性好,但其結(jié)構(gòu)回轉(zhuǎn)半徑大[3-6]。針對(duì)上述激光通信終端存在的問(wèn)題,提出庫(kù)德式激光通信終端[7-9],其結(jié)構(gòu)有運(yùn)動(dòng)外包絡(luò)小和后續(xù)子光路穩(wěn)定性好的特點(diǎn),如直徑250 mm的光學(xué)系統(tǒng),潛望式激光通信系統(tǒng)運(yùn)動(dòng)外包絡(luò)需1 200 mm以上,而庫(kù)德式激光通信系統(tǒng)運(yùn)動(dòng)外包絡(luò)則僅為400 mm左右;光通過(guò)庫(kù)德光路導(dǎo)入到安裝在基座的后續(xù)子光路中,后續(xù)子光路不隨轉(zhuǎn)臺(tái)運(yùn)動(dòng)光學(xué)穩(wěn)定性好。
以高軌對(duì)低軌激光通信為使用背景,為縮短建鏈時(shí)間,星間激光通信粗跟蹤探測(cè)器使用大視場(chǎng)接收信標(biāo)光,信標(biāo)光接收視場(chǎng)為4 mrad,望遠(yuǎn)單元放大倍率為12.5倍,經(jīng)放大后接收視場(chǎng)為50 mrad。粗跟蹤探測(cè)器接收信標(biāo)光需通過(guò)望遠(yuǎn)單元、多塊庫(kù)德反射鏡、分光片和粗跟蹤透鏡組。由于望遠(yuǎn)單元放大視場(chǎng)角和信標(biāo)光傳輸距離長(zhǎng),使得后續(xù)子光路光束口徑明顯增大,分光片鍍膜難度顯著增加。針對(duì)這一問(wèn)題,本文選擇二次成像型庫(kù)德光路并對(duì)其進(jìn)行設(shè)計(jì),在保證光學(xué)系統(tǒng)成像質(zhì)量的同時(shí)使信標(biāo)光光程縮短,縮小后續(xù)子光路粗跟蹤支路口徑。在跟蹤捕獲時(shí),此結(jié)構(gòu)中的望遠(yuǎn)單元和庫(kù)德反射鏡與分光片、粗跟蹤鏡組和探測(cè)器間存在相對(duì)運(yùn)動(dòng),信標(biāo)光傳遞環(huán)節(jié)多,跟蹤模型較為復(fù)雜。鑒于此,本文對(duì)二次成像型庫(kù)德式激光通信終端的粗跟蹤模型進(jìn)行推導(dǎo),并用Matlab-Simulink進(jìn)行仿真,最后通過(guò)試驗(yàn)驗(yàn)證了通信終端的跟蹤性能。
2 庫(kù)德光路形式選擇與設(shè)計(jì)
傳統(tǒng)庫(kù)德光路有3種形式:一次成像形式、無(wú)焦形式和二次成像形式。一次成像形式如圖1所示,其特點(diǎn)在于卡式物鏡和庫(kù)德光路共用焦距,由于卡式物鏡焦距很長(zhǎng),因此在遠(yuǎn)離物鏡處成像。
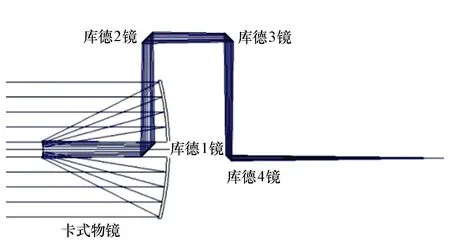
圖1 一次成像式庫(kù)德光路 Fig.1 Coude optical system of primary imaging
無(wú)焦形式如圖2所示,其特點(diǎn)是前方兩鏡系統(tǒng)為一個(gè)平行光進(jìn)、平行光出的望遠(yuǎn)單元,主次鏡聯(lián)合起來(lái)起到縮束的作用,其焦距在無(wú)窮遠(yuǎn)方。
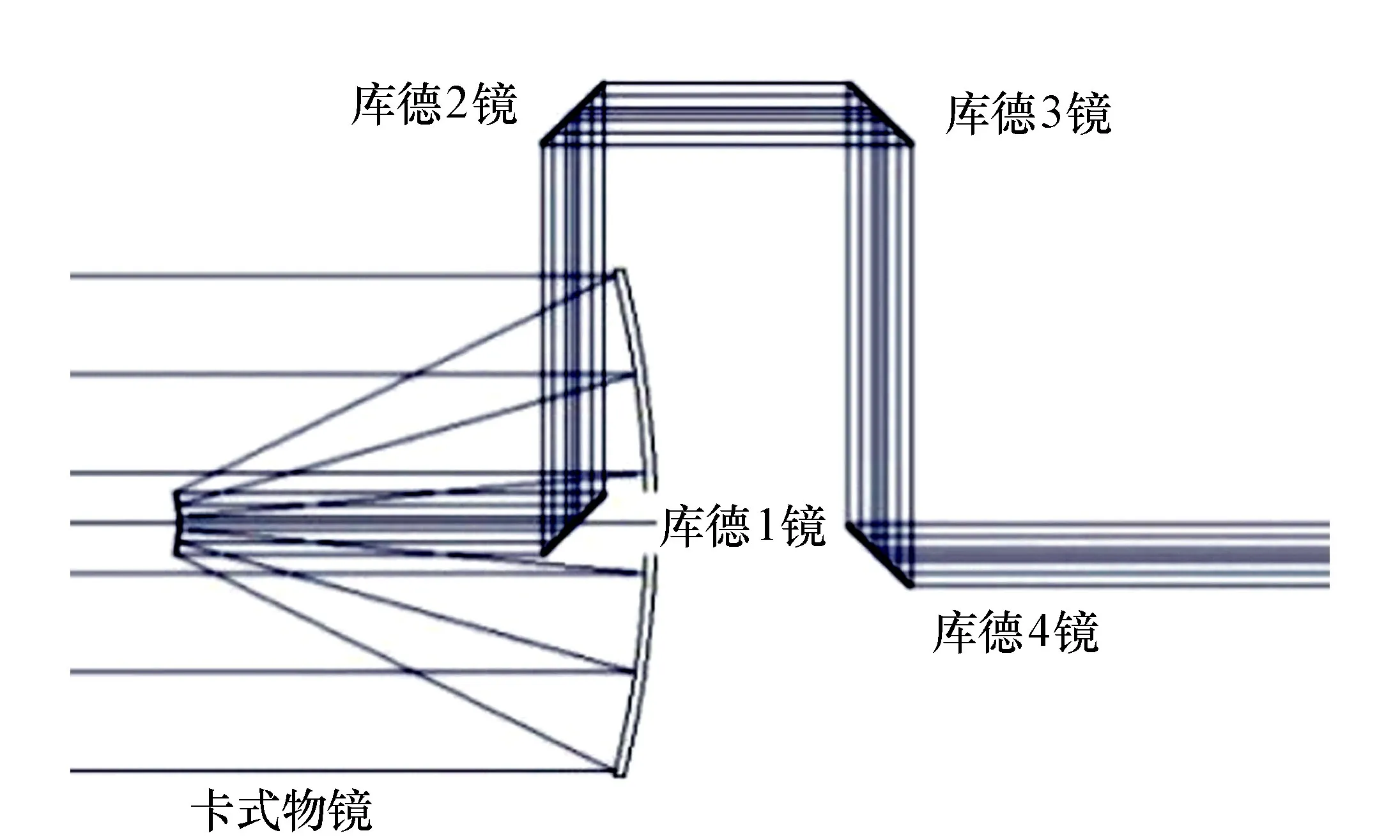
圖2 無(wú)焦形式的庫(kù)德光路 Fig.2 A no focal kind of coude optical system
二次成像形式如圖3所示,卡式物鏡有一次像面,通過(guò)一次像面后光束被二次準(zhǔn)直鏡準(zhǔn)直為平行光,再通過(guò)庫(kù)德鏡導(dǎo)入后續(xù)子光路。
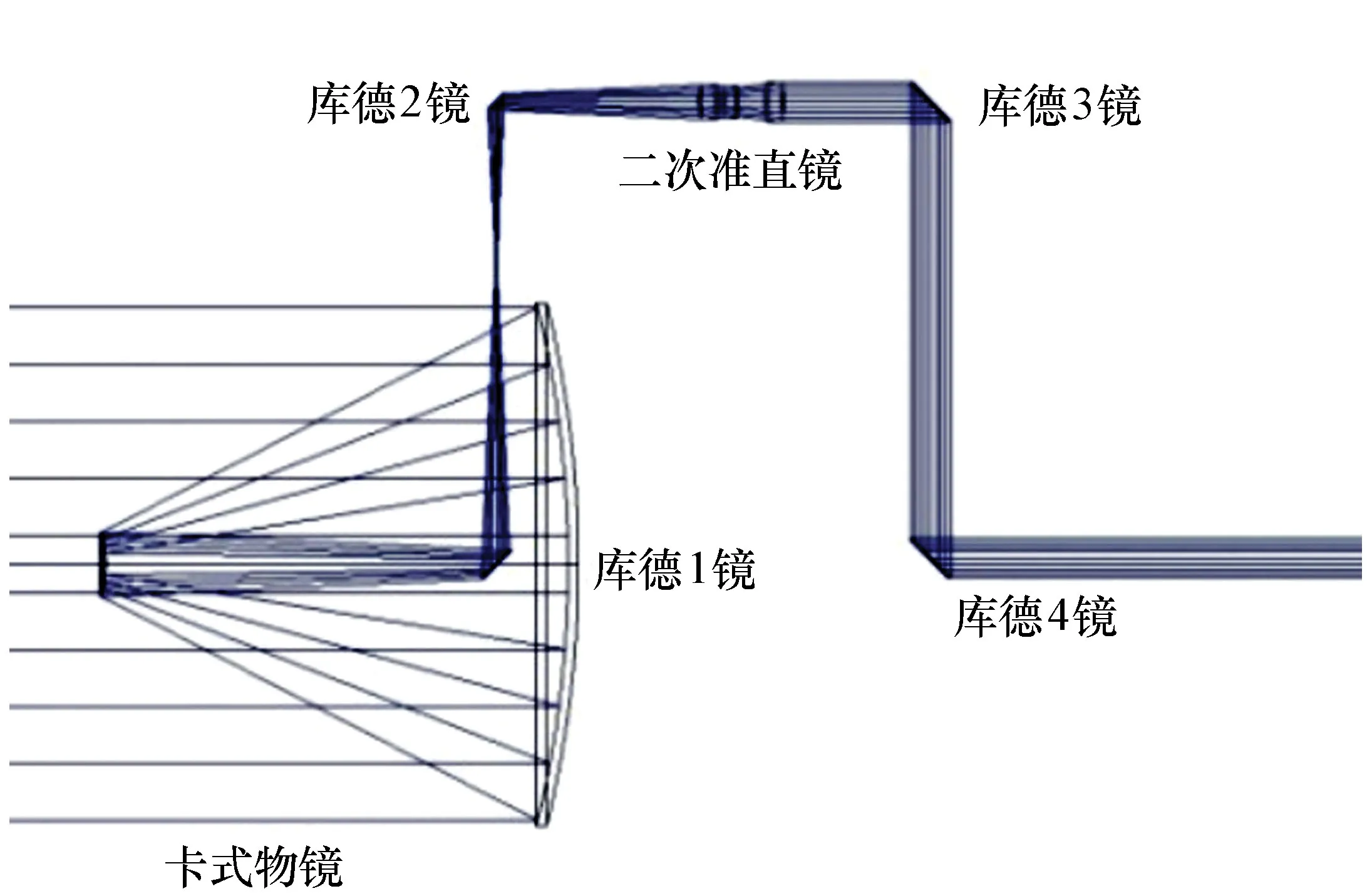
圖3 二次成像式的庫(kù)德光路 Fig.3 Coude optical system of reimaging imaging
上述3種庫(kù)德光路結(jié)構(gòu)形式中,一次成像式結(jié)構(gòu)末端出射的光束是匯聚光束,激光通信信標(biāo)光的收發(fā)波長(zhǎng)與通信光收發(fā)波長(zhǎng)各不相同,光束進(jìn)入到后續(xù)子光路后需對(duì)不同波長(zhǎng)進(jìn)行分光,而非平行光在通過(guò)介質(zhì)分光片時(shí)會(huì)導(dǎo)致光能的反射/透射效率大大下降,因此一次成像式結(jié)構(gòu)不適合對(duì)收發(fā)效率要求很高的激光通信系統(tǒng)。
無(wú)焦式結(jié)構(gòu)由于兩鏡縮束系統(tǒng)的出瞳離次鏡很近,同時(shí)激光通信粗跟蹤接收視場(chǎng)較大,來(lái)自各視場(chǎng)的光束離開(kāi)出瞳后就迅速發(fā)散,會(huì)導(dǎo)致后續(xù)子光路粗跟蹤支路口徑過(guò)大,光束口徑計(jì)算公式為:
(1)
式中,D1為粗跟蹤支路光學(xué)口徑,D0為出瞳時(shí)光束直徑,a為信標(biāo)光視場(chǎng)角,n為卡式物鏡放大倍率,L為信標(biāo)光出瞳后到粗跟蹤支路的距離。根據(jù)公式(1)可知信標(biāo)光出瞳后到粗跟蹤支路的距離L與粗跟蹤光學(xué)口徑D1成正比,此系統(tǒng)光學(xué)口徑為250 mm,信標(biāo)光接收視場(chǎng)為4 mrad,望遠(yuǎn)單元放大倍率為12.5倍,L為845.72 mm,D0為20 mm,由此可計(jì)算出無(wú)焦式結(jié)構(gòu)的D1粗跟蹤支路光學(xué)口徑為62.3 mm,粗跟蹤支路前端的R800T830(反射波長(zhǎng)800 nm透射波長(zhǎng)830 nm)分光片45°放置,其直徑達(dá)到88.1 mm。若采用無(wú)焦式結(jié)構(gòu)則后續(xù)子光路粗跟蹤支路重量和體積將會(huì)顯著增大,直徑超過(guò)50 mm分光片的鍍膜透過(guò)率也會(huì)降低。
而使用二次成像式結(jié)構(gòu)可以將望遠(yuǎn)單元部分(包括卡式物鏡和二次準(zhǔn)直鏡)的出瞳延后,從而減小了出瞳到最終像面的距離,有利于縮小后續(xù)子光路粗跟蹤支路的光學(xué)口徑[10-11]。
對(duì)二次成像型庫(kù)德光路進(jìn)行設(shè)計(jì),卡式物鏡光學(xué)結(jié)構(gòu)的一次像面設(shè)計(jì)在俯仰軸系附近,經(jīng)過(guò)庫(kù)德1、2鏡的兩次反射,再經(jīng)二次準(zhǔn)直鏡準(zhǔn)直為平行光束,經(jīng)庫(kù)德3、4鏡進(jìn)入后續(xù)子光路。為了縮小子光路光學(xué)口徑,將望遠(yuǎn)單元的卡式物鏡和二次準(zhǔn)直鏡之間的距離拉遠(yuǎn),從而延后出瞳位置,但二次準(zhǔn)直鏡的位置靠后也會(huì)造成二次準(zhǔn)直鏡尺寸增大。經(jīng)反復(fù)設(shè)計(jì)比較后,最終二次準(zhǔn)直鏡設(shè)在庫(kù)德2、3鏡中間,距庫(kù)德二鏡后107 mm,此距離可使整個(gè)望遠(yuǎn)單元(包括卡氏物鏡和二次準(zhǔn)直鏡)的出瞳位置向后移動(dòng)到達(dá)庫(kù)德3鏡附近。L為289.2 mm,通過(guò)公式(1)計(jì)算得到粗跟蹤透鏡組的直徑為34.5 mm。R800T830分光片直徑為48.7 mm光學(xué),結(jié)構(gòu)如圖4所示。相同光學(xué)系統(tǒng)口徑下,二次成像型庫(kù)德光路比無(wú)焦式結(jié)構(gòu)粗跟蹤透鏡組直徑可縮小27.8 mm,R800T830分光片直徑縮小39.4 mm。

圖4 優(yōu)化后庫(kù)德光路光學(xué)圖 Fig.4 Coude optical system after optimization

圖5 庫(kù)德光路粗跟蹤中心視場(chǎng)和邊緣視場(chǎng)波前誤差 Fig.5 Wavefront error of Coude optical system of the field of view in the rough tracking center and edge
通過(guò)選擇二次成像式結(jié)構(gòu)減小粗跟蹤支路光學(xué)口徑,從而可降低分光片鍍膜難度,減小了后續(xù)子光路體積、重量。如圖5所示,經(jīng)分析可知,庫(kù)德光路粗跟蹤支路中心視場(chǎng)波前均方根誤差為0.017 0λ(λ=808 nm)和最大邊緣視場(chǎng)(4 mrad)波前均方根誤差為0.083 4λ(λ=808 nm),兩者都優(yōu)于1/10λRMS (λ=808 nm)。表1為庫(kù)德式激光通信端機(jī)主天線參數(shù)。
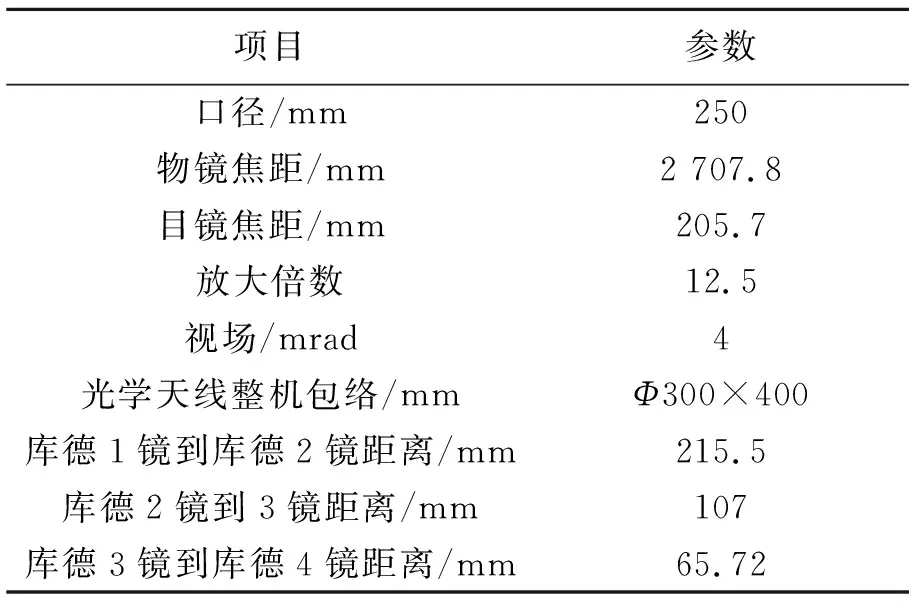
表1 主天線參數(shù)
3 二次成像型庫(kù)德光路光線傳輸與跟蹤模型
捕獲時(shí),望遠(yuǎn)單元和庫(kù)德反射鏡與粗跟蹤探測(cè)器間存在相對(duì)運(yùn)動(dòng),信標(biāo)光傳遞環(huán)節(jié)多,跟蹤模型復(fù)雜。因此,需要對(duì)二次成型庫(kù)德光路光線傳輸與跟蹤模型進(jìn)行推導(dǎo)。

圖6 庫(kù)德光路的組成及坐標(biāo)系 Fig.6 Composition of the Coude optical system and coordinate system
激光通信終端進(jìn)行捕獲時(shí),終端帶動(dòng)卡式物鏡進(jìn)行掃描,信標(biāo)光到粗跟蹤探測(cè)器前需經(jīng)過(guò)卡式物鏡、庫(kù)德1鏡、庫(kù)德2鏡、二次準(zhǔn)直鏡、庫(kù)德3鏡、庫(kù)德4鏡、R800透T1550分光片和R808T830分光片,粗跟蹤透鏡組,如圖6所示。
PZT振鏡、R800T1550分光片、R808T830分光片、粗跟蹤透鏡組位于星體的內(nèi)部,建立基座坐標(biāo)系,粗跟蹤探測(cè)器靶面坐標(biāo)是基座坐標(biāo)系的Y軸和Z軸[12],庫(kù)德反射鏡隨通信終端相對(duì)于星體運(yùn)動(dòng),庫(kù)德1鏡相對(duì)于坐標(biāo)系做Z軸和X軸的旋轉(zhuǎn)運(yùn)動(dòng),庫(kù)德2鏡、3鏡和4鏡相對(duì)于坐標(biāo)系做Z軸旋轉(zhuǎn)運(yùn)動(dòng)。信標(biāo)光沿Z軸入射矩陣是A0=[0 0 -1]T,通信過(guò)程中信標(biāo)光進(jìn)入卡式物鏡中的方向是任意的,通過(guò)公式(2)計(jì)算出任意角度入射光線A1:
(2)
式中,λ0為信標(biāo)光與X軸的夾角,α0為信標(biāo)光與Y軸的夾角。信標(biāo)光經(jīng)過(guò)庫(kù)德1鏡,若庫(kù)德1鏡靜止不動(dòng),則其反射矩陣T1為:
(3)

(4)
式中,TGx為繞X軸的旋轉(zhuǎn)矩陣,同時(shí)俯仰軸相對(duì)于粗跟蹤探測(cè)器坐標(biāo),繞方位軸Z軸轉(zhuǎn)動(dòng),其最終的反射矩陣為:
(5)
式中,Gz為繞Z軸的旋轉(zhuǎn)矩陣,庫(kù)德2鏡、3鏡和4鏡相對(duì)于探測(cè)器坐標(biāo)系繞Z軸運(yùn)動(dòng),其矩陣公式(6)所示:

(6)
PZT振鏡、R800T1550分光片、R808T830分光片,相對(duì)于探測(cè)器靜止不動(dòng),最后探測(cè)器接收光斑矩陣A8如公式(7)所示:
(7)

(8)
式中,θEL為當(dāng)前信標(biāo)光入射角度下俯仰軸角度,θAZ為當(dāng)前信標(biāo)光入射角度下方位軸角度,探測(cè)器接收到光斑后,讀出探測(cè)器的脫靶量,如公式(9)所示:
(9)
式中,F(xiàn)為粗信標(biāo)透鏡組焦距,Y、Z為光斑距離粗跟蹤探測(cè)器中心的距離即脫靶量。聯(lián)立方程(8)和(9)求得信標(biāo)光的入射角度:
(10)

(11)
式中,φEL為跟蹤時(shí)調(diào)整的俯仰角,坐標(biāo)系經(jīng)過(guò)俯仰軸的轉(zhuǎn)動(dòng)后,方位軸Z軸發(fā)生了變化,其Z軸的單位向量變?yōu)閍=[0 -sinθEL-cosθEL]T,繞單位向量a旋轉(zhuǎn)后得到的方位跟蹤矩陣為:
(12)

(13)
通過(guò)公式(13)的模型,通信終端可以根據(jù)粗跟蹤探測(cè)器脫靶量位置,計(jì)算出方位和俯仰跟蹤轉(zhuǎn)動(dòng)的角度,實(shí)現(xiàn)通信終端對(duì)目標(biāo)的跟蹤。
4 庫(kù)德光路跟蹤模型仿真
使用Matlab-Simulink對(duì)庫(kù)德光路的跟蹤模型進(jìn)行仿真,其仿真模型如圖7所示。

圖7 跟蹤仿真模型 Fig.7 Tracking simulation model
圖中,Y方向脫靶量和Z方向脫靶量是粗跟蹤相機(jī)對(duì)光斑的判讀值,計(jì)算入射角模型內(nèi)寫(xiě)入公式(10)數(shù)學(xué)模型,角度跟蹤模型寫(xiě)入公式(13)中φEL和φAZ的數(shù)學(xué)模型,int1和int2內(nèi)為電機(jī)控制模型。
粗跟蹤最大跟蹤視場(chǎng)為±4 000 μrad,如圖8所示,使用Matlab分別在Y方向脫靶量范圍和Z方向脫靶量范圍內(nèi)隨機(jī)取若干組合坐標(biāo),終端俯仰和方位轉(zhuǎn)動(dòng)范圍分別為±20°和±100°,用同種方法在轉(zhuǎn)動(dòng)范圍內(nèi)取若干方位、俯仰角度坐標(biāo)組合,分別把脫靶量和初始角度帶入跟蹤仿真模型中進(jìn)行仿真,通過(guò)所取數(shù)值計(jì)算出方位和俯仰的角度增量值,通信終端均可將光斑移動(dòng)到靶面中心實(shí)現(xiàn)跟蹤。

圖8 脫靶量散點(diǎn)圖 Fig.8 Miss distance scatter plot
以俯仰20°、方位100°最大轉(zhuǎn)動(dòng)角度初始值下,靠近中心視場(chǎng)和邊緣視場(chǎng)的兩個(gè)隨機(jī)光斑位置為例,這兩組脫靶量分別為(-0.1×10-5rad,0.7×10-5rad)、(3.88×10-3rad,3.41×10-3rad),通過(guò)跟蹤仿真模型分別算出圖9(a)和圖10(a)方位和俯仰的角度增量,最后根據(jù)角度增量值控制電機(jī)轉(zhuǎn)動(dòng)角度,由于電機(jī)控制算法的原因,曲線出現(xiàn)超調(diào),隨后將光斑穩(wěn)定在視場(chǎng)的中心,如圖9(b)和圖10(b)所示。

圖9 中心視場(chǎng)附近角度增量和光斑脫靶量 Fig.9 Angle increment and spot miss distance near the center of view

圖10 邊緣視場(chǎng)附近角度增量和光斑脫靶量 Fig.10 Angle increment and spot miss distance near the edge of the field of view
使用Matlab-Simulink建立仿真模型,對(duì)二次成像型庫(kù)德式激光通信端機(jī)跟蹤模型進(jìn)行仿真,仿真結(jié)果顯示跟蹤模型可以實(shí)現(xiàn)對(duì)信標(biāo)光的跟蹤,證明跟蹤模型正確性。
5 激光通信粗跟蹤試驗(yàn)
通過(guò)試驗(yàn)驗(yàn)證二次成像型庫(kù)德式激光通信終端跟蹤模型的正確性及整個(gè)系統(tǒng)的跟蹤性能。粗跟蹤測(cè)試試驗(yàn)方案如圖11所示,其中10 m離軸光管模擬遠(yuǎn)距離目標(biāo)終端,平行光管焦面附近設(shè)置波長(zhǎng)808 nm激光器作為目標(biāo)終端的信標(biāo)發(fā)射源,激光器前端架電磁振鏡,電磁振鏡用于模擬平臺(tái)振動(dòng)特性。其時(shí)域振動(dòng)曲線根據(jù)衛(wèi)星平臺(tái)振動(dòng)譜模擬振動(dòng)源[13]如圖12所示。
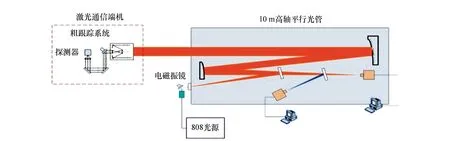
圖11 粗跟蹤測(cè)試試驗(yàn)方案 Fig.11 Test program of rough tracking

圖12 衛(wèi)星平臺(tái)振動(dòng)時(shí)域曲線 Fig.12 Time domain curve of vibration of satellite platform
激光通信終端固定在搖擺臺(tái)上,搖擺臺(tái)用于模擬平臺(tái)姿態(tài)大幅度運(yùn)動(dòng)特性,搖擺臺(tái)激勵(lì)信號(hào)為最大速度0.5°/s、最大加速度0.05°/s2的正弦角度曲線。
試驗(yàn)過(guò)程中,開(kāi)啟通信終端的粗跟蹤模式,對(duì)目標(biāo)信標(biāo)發(fā)射源進(jìn)行掃描,粗跟蹤探測(cè)器接收到信標(biāo)光后得到脫靶量信息,通過(guò)跟蹤模型得到電機(jī)轉(zhuǎn)臺(tái)角度增量,控制電機(jī)使光斑和探測(cè)器中心重合實(shí)現(xiàn)對(duì)信標(biāo)光的跟蹤[14-16]。
記錄在外界擾動(dòng)下跟蹤穩(wěn)定時(shí)探測(cè)器接收到光斑的實(shí)時(shí)脫靶量,并通過(guò)統(tǒng)計(jì)分析多組脫靶量數(shù)據(jù)得出粗跟蹤精度,檢測(cè)出的數(shù)據(jù)如圖13所示。

圖13 粗跟蹤誤差曲線 Fig.13 Coarse tracking error curve
其中左圖為實(shí)測(cè)方位跟蹤脫靶量,右圖為實(shí)測(cè)俯仰脫靶量,實(shí)測(cè)方位跟蹤最大脫靶量為84.65 μrad(3σ),均方差為16.21 μrad;實(shí)測(cè)俯仰最大脫靶量為56.33 μrad(3σ),俯仰跟蹤均方差為17.78 μrad。滿足技術(shù)指標(biāo)要求150 μrad(3σ)。
6 結(jié) 論
針對(duì)激光通信終端光學(xué)負(fù)載穩(wěn)定性差和安裝空間受限情況下存在的問(wèn)題,提出了采用庫(kù)德式激光通信終端作為解決方案。介紹了3種傳統(tǒng)的庫(kù)德光路形式,經(jīng)分析對(duì)比,選擇二次成像型庫(kù)德光路作為終端并對(duì)其進(jìn)行設(shè)計(jì),通過(guò)縮小粗跟蹤支路口徑,降低分光片鍍膜難度,減小后續(xù)子光路體積和重量。接著,對(duì)其跟蹤模型進(jìn)行了推導(dǎo),通信終端可以根據(jù)粗跟蹤探測(cè)器脫靶量計(jì)算出方位和俯仰跟蹤所需轉(zhuǎn)動(dòng)的角度,實(shí)現(xiàn)終端對(duì)目標(biāo)的跟蹤。最后通過(guò)仿真和試驗(yàn)驗(yàn)證其算法的正確性和系統(tǒng)的跟蹤性能。結(jié)果顯示:實(shí)測(cè)方位跟蹤最大脫靶量為84.65 μrad(3σ),均方差為16.21 μrad;實(shí)測(cè)俯仰最大脫靶量為56.33 μrad,俯仰跟蹤均方差為17.78 μrad。滿足星間激光通信粗跟蹤捕獲跟蹤150 μrad(3σ)技術(shù)要求,此結(jié)構(gòu)和跟蹤模型對(duì)類似的激光通信粗跟蹤系統(tǒng)有一定的指導(dǎo)意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19