BDS三頻約束的多系統(tǒng)短基線模糊度單歷元固定算法
2018-09-03 00:46:48余學(xué)祥王勝利柴大帥
導(dǎo)航定位學(xué)報(bào) 2018年3期
劉 揚(yáng),余學(xué)祥,王勝利,柴大帥
(1.安徽理工大學(xué) 測(cè)繪學(xué)院,安徽 淮南 232001;2.山東科技大學(xué) 海洋工程研究院,山東 青島 266590;3.中國(guó)礦業(yè)大學(xué) 環(huán)境與測(cè)繪學(xué)院,江蘇 徐州 221116)
0 引言
隨著全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)的不斷發(fā)展,美國(guó)的全球定位系統(tǒng)(global positioning system,GPS)和俄羅斯的格洛納斯(global navigation satellite system,GLONASS)已經(jīng)發(fā)展得比較成熟,而我國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system,BDS)發(fā)展迅速,目前已完全覆蓋亞太地區(qū)[1],并計(jì)劃2017年下半年發(fā)射BDS第三代衛(wèi)星,將于2020年覆蓋全球并實(shí)現(xiàn)服務(wù);因此多系統(tǒng)之間的融合是未來發(fā)展的趨勢(shì)。利用GNSS載波差分獲得的厘米級(jí)高精度定位結(jié)果已經(jīng)廣泛應(yīng)用于軍事和民用領(lǐng)域,而載波差分定位的關(guān)鍵在于模糊度的快速固定,如何快速固定模糊度一直以來是國(guó)內(nèi)外研究的熱點(diǎn)和難點(diǎn)[2-3]。文獻(xiàn)[4]提出利用多系統(tǒng)融合不僅能夠增加觀測(cè)衛(wèi)星的個(gè)數(shù)、優(yōu)化定位的幾何結(jié)構(gòu),而且能夠較好地解決信號(hào)遮擋等問題,大大地提高定位的精度和可靠性;并指出與只使用GPS單系統(tǒng)相比,解算時(shí)間大約減少了70 %,精度提高了25 %。
三頻載波模糊度解算(three-carrier ambiguity resolution,TCAR)[5]和級(jí)聯(lián)整數(shù)解算(cascading integer resolution,CIR)[6]都是比較經(jīng)典的解算短基線模糊度的三頻模糊度解算方法,二者的原理相似,采用無幾何模型分別對(duì)超寬巷(extra wide lane,EXL)、寬巷(wide lane,WL)和窄巷(narrow lane,NL)的模糊度進(jìn)行解算。基于上述理論,國(guó)內(nèi)外大量學(xué)者對(duì)2種方法和改進(jìn)的算法進(jìn)行了研究,其中文獻(xiàn)[7]使用TCAR,分別利用幾何模型(geometry-based,GB)和無幾何模型(geometry-free,GF)對(duì)模糊度進(jìn)行固定;文獻(xiàn)[8]在傳統(tǒng)的TCAR的基礎(chǔ)上引入電離層延遲先驗(yàn)信息,把電離層延遲、模糊度和位置參數(shù)作為未知數(shù);文獻(xiàn)[9]充分利用整數(shù)最小二乘法(integer least-squares,ILS)和CIR的優(yōu)勢(shì)提出了一種改進(jìn)的載波相位模糊度固定方法。上述研究都利用了GNSS多頻多系統(tǒng)的優(yōu)勢(shì)來進(jìn)行模糊度固定,主要集中在多系統(tǒng)的組合方面,并未充分發(fā)揮單個(gè)系統(tǒng)在算法中的優(yōu)勢(shì)。
本文基于已有的三頻模糊度解算方法,提出一種基于BDS三頻約束的GNSS短基線單歷元模糊度解算方法,以期快速可靠地固定GNSS差分模糊度。
1 模糊度固定算法模型
根據(jù)三頻模糊度比較容易固定的特點(diǎn),利用BDS三頻載波觀測(cè)值組合出多種不同波長(zhǎng)的超寬巷和寬巷組合觀測(cè)值來進(jìn)行模糊度的快速固定[10]。首先快速求出超寬巷(0,-1,1)和(1,4,-5)組合觀測(cè)值模糊度;然后根據(jù)線性關(guān)系求出(1,-1,0)組合的寬巷觀測(cè)值模糊度,利用寬巷觀測(cè)方程與B1載波觀測(cè)方程組成無幾何模型方程求出B1頻點(diǎn)的模糊度;最后利用已固定的BDS B1模糊度來求算GNSS L1頻點(diǎn)的模糊度。算法流程如圖1所示。
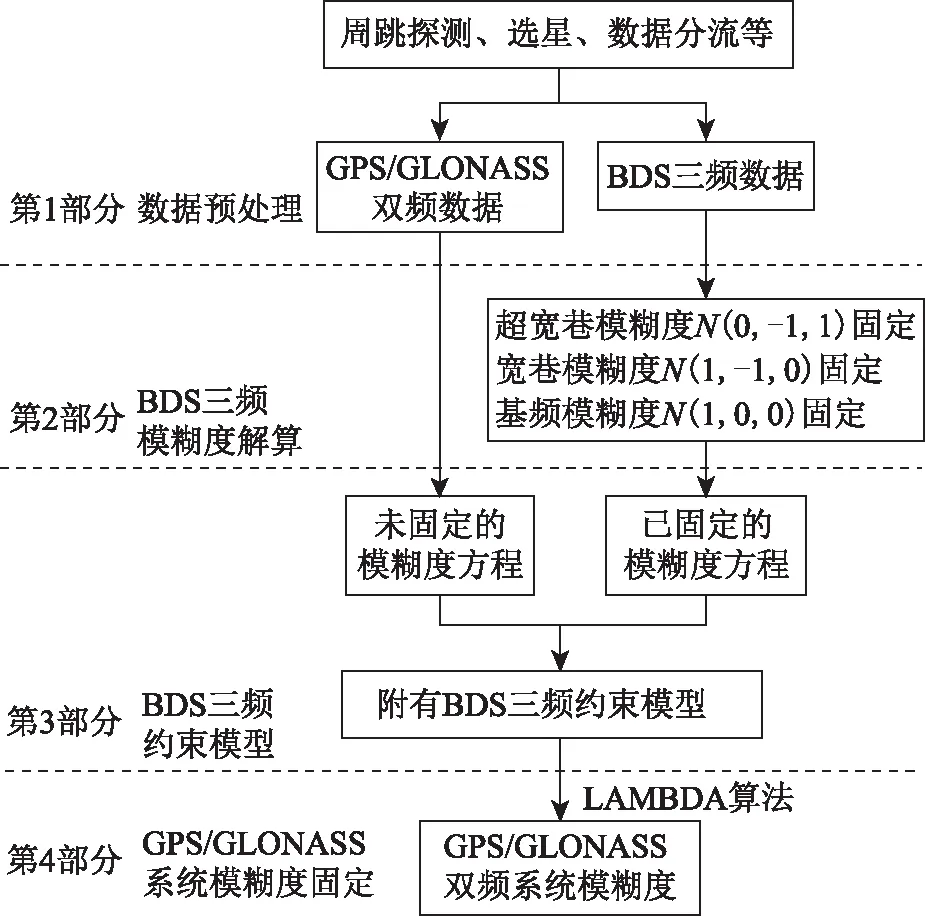
圖1 單歷元GNSS模糊度固定流程
1.1 BDS三頻模糊度固定算法
顧及對(duì)流層延遲和電離層延遲誤差,偽距和載波差分觀測(cè)方程[11]為


偽距和載波組合觀測(cè)值分別為
(2)
(3)
式中Ps,fs,Φs分別為頻段s的偽距、載波頻率和載波觀測(cè)值(s=1,2,3)。
組合觀測(cè)值的波長(zhǎng)、頻率、模糊度[12]分別為

(4)
f(i,j,k)=i·f1+j·f2+k·f3
(5)
(6)
式中:c為光速;λs為頻段s的波長(zhǎng)(s=1,2,3)。組合電離層的延遲因子為
(7)
組合載波雙差觀測(cè)值噪聲為
(8)
組合系數(shù)為(0,1,-1)和(1,4,-5)的超寬巷組合觀測(cè)值的模糊度為
(9)
其中[]為四舍五入取整。
(10)

(11)
(12)
待寬巷模糊度固定后,可由寬巷觀測(cè)方程和載波觀測(cè)方程聯(lián)立,求出B1頻點(diǎn)的模糊度。寬巷觀測(cè)方程和載波觀測(cè)方程為
(13)

將式(13)聯(lián)立可得B1頻點(diǎn)的模糊度的計(jì)算式為

(14)
由式(14)得到的模糊度固定解標(biāo)準(zhǔn)差為0.208個(gè)周期,根據(jù)已得到的寬巷模糊度精確值,直接通過四舍五入取整,即得到精度很高的模糊度解。
1.2 基于BDS約束的GNSS模糊度固定
當(dāng)BDS衛(wèi)星的模糊度被固定后,將BDS衛(wèi)星的雙差觀測(cè)方程與GPS/GLONASS衛(wèi)星組成的觀測(cè)方程聯(lián)立求解出基線向量和GPS/GLONASS衛(wèi)星的雙差模糊度;已知的BDS B1模糊度精確值可以作為約束條件來加快GPS/GLONASS衛(wèi)星的雙差模糊度的解算。其誤差方程為
(15)

V=AX′-L
(16)
當(dāng)對(duì)式(16)進(jìn)行解算求出GPS/GLONASS模糊度浮點(diǎn)解之后,利用LAMBDA算法對(duì)模糊度浮點(diǎn)解進(jìn)行搜索固定。當(dāng)模糊度被精確固定之后將其帶入式(16)和式(17)中求解坐標(biāo)向量X'和單位權(quán)中誤差σ0為
(17)
式中:v為殘差;p為權(quán)矩陣,n為每個(gè)歷元中觀測(cè)值的個(gè)數(shù),t為必要觀測(cè)值個(gè)數(shù)。
2 實(shí)驗(yàn)與結(jié)果分析
為測(cè)試本文GNSS單歷元模糊度解算方法的精度和可靠性,采用一組實(shí)測(cè)的BDS/GPS/GLONASS 3系統(tǒng)短基線數(shù)據(jù)進(jìn)行驗(yàn)證。數(shù)據(jù)采集時(shí)間為2016-07-17 T 00:00:00—24:00:00,采樣間隔30 s,基線長(zhǎng)8.4 m,截止高度角為10°,并且基站與流動(dòng)站的精確坐標(biāo)已知。根據(jù)本文提出的方法,首先固定BDS三頻模糊度,再利用固定的BDS模糊度來計(jì)算GPS/GLONASS的模糊度。圖2和圖3分別表示BDS和GPS/GLONASS的可視衛(wèi)星數(shù)目,可以看出在這24 h的時(shí)間內(nèi),BDS衛(wèi)星個(gè)數(shù)為8~13顆,GPS/GLONASS組合系統(tǒng)觀測(cè)的衛(wèi)星個(gè)數(shù)為14~27顆。
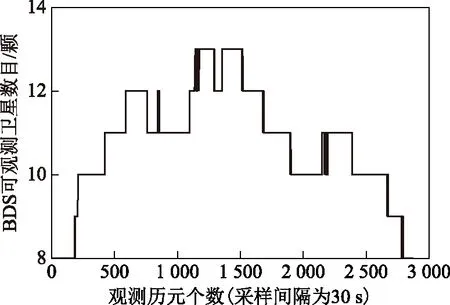
圖2 BDS可視衛(wèi)星個(gè)數(shù)
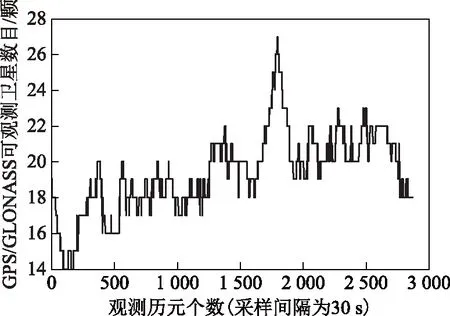
圖3 GPS/GLONASS可視衛(wèi)星個(gè)數(shù)
由圖4可知,大部分時(shí)刻觀測(cè)值的單位權(quán)中誤差都小于4 mm,但是存在部分時(shí)刻結(jié)果較大的情況,最大值將近8 mm。
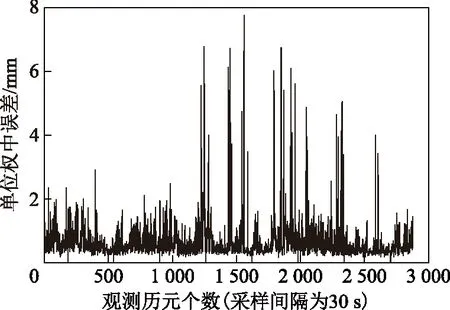
圖4 單位權(quán)中誤差值
根據(jù)模糊度已固定的BDS三頻載波觀測(cè)值作為約束求GPS/GLONASS的模糊度,在驗(yàn)證算法的有效性之前,數(shù)據(jù)中周跳已探測(cè)并修復(fù)。圖5表示求解GPS/GLONASS模糊度時(shí)的Ratio值,可以看出本組數(shù)據(jù)大部分歷元的Ratio值較大。載波觀測(cè)值的噪聲為2 mm,大于3倍中誤差,認(rèn)為錯(cuò)誤,這里以Ratio>2[14]和Sigma0<0.002×3作為模糊度的固定條件,從結(jié)果可得到模糊度固定率為99.72 %;沒有完全固定的情況主要是硬件或環(huán)境原因,造成0.28 %的歷元BDS衛(wèi)星數(shù)目不夠。

圖5 Ratio值
圖6~8分別為N、E、U3個(gè)方向的坐標(biāo)差值,從圖中可以看出,N、E方向的差值大都在±20 mm之內(nèi),U方向的差值主要集中在±30 mm。表1是對(duì)單歷元差分解算結(jié)果進(jìn)行的精度統(tǒng)計(jì),從表中可以看出,N方向的中誤差(root mean square,RMS)為5.60,E方向的中誤差為7.52,U方向的中誤差為7.68 mm,并未出現(xiàn)比較大的偏差。
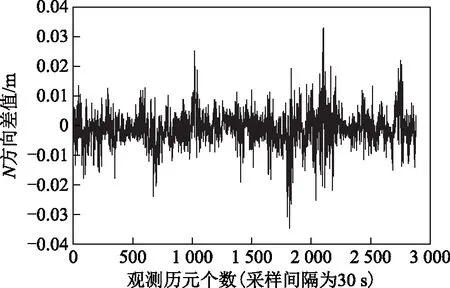
圖6 N方向差值
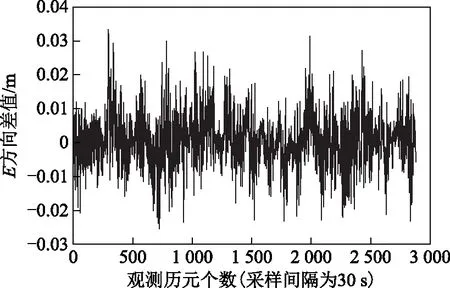
圖7 E方向差值
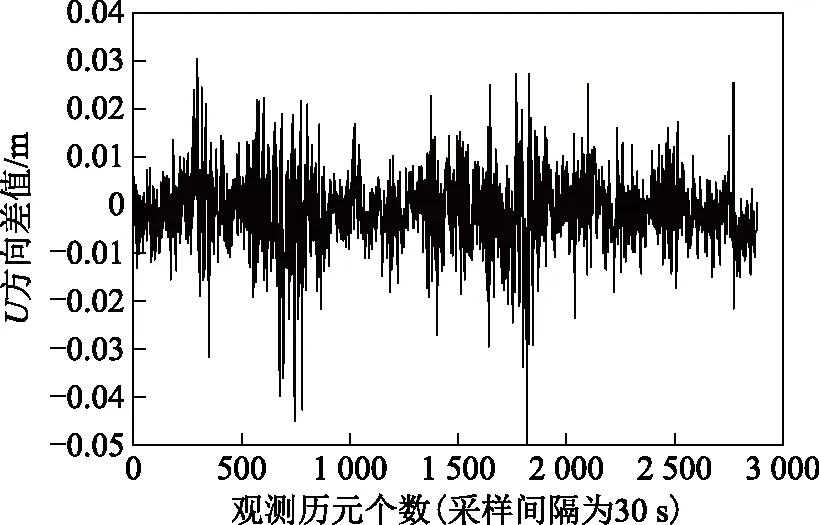
圖8 U方向差值

表1 單歷元差分定位結(jié)果RMS值mm

提出的方法求解BDS/GPS/GLONASS模糊度是準(zhǔn)確可靠的。對(duì)于模糊度未能成功固定的,主要原因有2點(diǎn):
1)寬巷模糊度固定錯(cuò)誤;
2)觀測(cè)噪聲和電離層殘差影響了BDS載波觀測(cè)值模糊度的固定。
3 結(jié)束語(yǔ)
本文充分發(fā)揮了BDS三頻點(diǎn)的優(yōu)勢(shì),提出一種短基線GNSS單歷元模糊度快速固定的方法,實(shí)測(cè)數(shù)據(jù)結(jié)果表明:1)利用三頻觀測(cè)值組合得到的超寬巷和寬巷組合觀測(cè)值,可以更容易地固定模糊度,結(jié)果表明使用本文提出的方法模糊度固定率為99.72 %;2)使用模糊度固定的BDS載波觀測(cè)值作為約束求解GNSS模糊度,不僅增加了觀測(cè)方程的可靠性,而且提高了GNSS模糊度固定的效率,結(jié)果表明固定成功率能達(dá)到98.73 %,證明該方法對(duì)短基線而言是有效的。