自適應(yīng)逐次逼近的粗時段導航算法
2018-09-03 00:55:24王民康孟海螺秦紅磊
導航定位學報 2018年3期
王民康,孟海螺,秦紅磊
(1.北京航空航天大學 電子信息工程學院,北京 100191;2.中國兵器工業(yè)集團第二○五研究所 總體五部,西安 710065)
0 引言
全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GNSS)由于其全球性、全天候、全時段、實時、高精度的特性得到了廣泛的應(yīng)用,而隨著時代的發(fā)展,GNSS不斷在各個領(lǐng)域衍生出新的應(yīng)用。尤其是1996年美國通訊委員會頒布了“E911”的行政性命令,要求任何時間、地點都能通過手機追蹤到用戶,使得基于位置的服務(wù)(location based service,LBS)逐漸受到了重視并且需求越來越大。LBS主要面向的是如手機和個人數(shù)字助理等終端,在這些應(yīng)用中,首次定位時間(time to first fix,TTFF)、成本、功耗成為了接收機的嚴格指標。現(xiàn)有的LBS技術(shù)中,主要有到達時間(time of arrival,TOA)、入射角(arrival of angle,AOA)、輔助GNSS(assisted-GNSS,A-GNSS)以及用于室內(nèi)定位的無線保真(wireless fidelity,WiFi)等;這其中,A-GNSS既保留了傳統(tǒng)GNSS技術(shù)的優(yōu)良特性,又有快速定位和高靈敏的優(yōu)勢,得到了最為廣泛的應(yīng)用[1]。
A-GNSS由輔助服務(wù)器通過通信網(wǎng)絡(luò)提供給接收機輔助信息,包括時間、位置、衛(wèi)星星歷和歷書等數(shù)據(jù),以此來輔助解算相關(guān)信息,降低首次定位時間。傳統(tǒng)接收機中,衛(wèi)星的發(fā)射時間是計算全偽距和衛(wèi)星位置的前提條件;而A-GNSS中衛(wèi)星發(fā)射時間可以由精時間輔助或者解調(diào)導航電文得到。當只能得到一個粗略的輔助時間,并且無法解調(diào)得到衛(wèi)星信號發(fā)射時間時,衛(wèi)星發(fā)射信號時刻的具體位置將不能確定,也就是產(chǎn)生了粗時段導航問題。為了解決粗時段導航問題,文獻[2]提出了Range Fit方法,引入Lambda-fraction函數(shù)來求解衛(wèi)星發(fā)射時刻的毫秒整數(shù)部分;但其要求提供一個誤差小于150 km的初始用戶位置,且沒有解決毫秒整數(shù)的模糊問題。文獻[3]提出一種重構(gòu)全偽距的方法來解決毫秒整數(shù)的模糊問題,通過引入一個新的變量即粗時間誤差到導航定位方程中來解決粗時間問題;算法要求提供一個100 km誤差以內(nèi)的初始位置和1 min誤差以內(nèi)的初始時間。文獻[4]在此基礎(chǔ)上,提出了一種不需要初始位置的粗時段導航算法,先驗位置由多普勒定位算出。文獻[5-6]的進一步研究使得初始時間的誤差放寬到12 h,甚至幾天。
但是,相對于常規(guī)導航定位解算方程,粗時段導航方程存在著定位精度較差的問題[5]。粗時段導航方程在構(gòu)建狀態(tài)矩陣時將偽距速率設(shè)為恒定值,而由于衛(wèi)星加速度和衛(wèi)星時鐘速率變化率的存在,迭代解算時會引入線性化誤差。文獻[7]的實驗結(jié)果表明,隨著粗時誤差的增大,粗時導航解算的定位誤差也隨之增大。此外,文獻[8]證明了由于粗時導航方程中添加了一個額外的狀態(tài),使得所有的精度衰減因子(dilution of precision,DOP)都會大于或等于原始的四狀態(tài)導航方程對應(yīng)的值,從而使得最終的定位誤差變大。
本文針對粗時段導航解算中存在的定位誤差問題,提出一種自適應(yīng)逐次逼近的粗時段導航算法。該算法通過每次迭代時更新衛(wèi)星發(fā)射時間和位置以及偽距速率來減小線性化誤差,并在解出精時間后重新推入四狀態(tài)導航方程以解決DOP問題。
1 粗時段導航

(1)

因此,新的偽距殘差可以表示為

(2)
式中:δxxyz為三維向量,是δx的空間元素[δx,δy,δz]T;ε(k)為測量誤差;δb為公共偏差的狀態(tài)更新量。
那么擴展到N顆可用衛(wèi)星的情況,可得一個新的矩陣方程組
δρ=Hδx+ε
(3)


從幾何矩陣H中可以看出,至少需要獨立的5行變量才能求解出δx;因此粗時段導航需要至少5顆不同的可用衛(wèi)星。
然而,由于多數(shù)情況下完整的偽距測量值ρ(k)沒有得到,僅能由捕獲或跟蹤得到擴頻碼碼相位值,測量偽距將是一個亞毫秒值。由于未知的常見偏差的存在,使得粗時段導航還存在著毫秒整數(shù)模糊的問題。文獻[3]給出一種重構(gòu)全偽距的方法來解決整毫秒模糊問題,流程如下:



(4)

3)計算按照仰角排序列表中的下一顆衛(wèi)星k的整毫秒偽距值N(k)。其重構(gòu)的全偽距和其期望偽距的關(guān)系為

(5)
式(5)和式(4)相減可得:

(6)
式(6)消除了公共偏差b。當-d(k)+ε(k)-d(0)+ε(0)的絕對值小于0.5個光毫秒時,k號衛(wèi)星的整毫秒偽距可以估計為

(7)
從而得到k號衛(wèi)星的全偽距ρ(k)=N(k)+z(k)。
4)更新參考衛(wèi)星為上一個計算完的衛(wèi)星,然后到步驟3),計算下一顆衛(wèi)星的全偽距。
要使得重構(gòu)全偽距算法有效,從式(7)中可知,先驗位置和時間引起的誤差需要在150 km以內(nèi)。通常在A-GNSS系統(tǒng)中,先驗的位置和時間信息可由通信網(wǎng)絡(luò)提供,位置可通過Cell-ID等技術(shù)得到,一般精度可達3 km;而GSM網(wǎng)絡(luò)可提供1~2 s的時間精度,可滿足上述約束條件。一般來講,100 km以內(nèi)的先驗位置誤差和1 min以內(nèi)的先驗時間誤差可以使得上述重構(gòu)全偽距算法一直有效。
2 粗時段導航算法中的定位誤差分析
2.1 粗時段導航中的線性化誤差
粗時段導航通過添加粗時間這個新的狀態(tài)來解決粗時間的問題。在第1節(jié)中可以看到粗時段導航的4個步驟,當計算得到狀態(tài)更新向量之后,將會調(diào)整先驗狀態(tài),也就是先驗位置、公共偏差和粗時間。幾何矩陣H中的接收機與衛(wèi)星連線單位矢量e(k)會依據(jù)先驗狀態(tài)進行更新;而一般來講,粗時段導航中,衛(wèi)星的位置在每次迭代中不會更新,依靠幾何矩陣H中第5個狀態(tài)v(k)來補償衛(wèi)星位置引起的誤差。通常v(k)也不會每次迭代都更新,而是在粗時段導航定位解算過程中保持不變。衛(wèi)星的運動存在加速度和加加速度,速度并非恒定值,對衛(wèi)星的速度進行建模,可以表示為

(8)
式中:v(tm)為衛(wèi)星在時刻tm時的速度;v0為參考時刻的速度;t為時間單位;a(t)為與時間有關(guān)的加速度。
表1給出了在不同的粗時誤差下五狀態(tài)粗時段導航的3維定位精度比較,所采用的數(shù)據(jù)為62 MHz采樣的實際GPS L1靜態(tài)數(shù)據(jù),每隔1 s時間獲取一次碼相位測量數(shù)據(jù),來進行粗時段導航定位。
從表1中可知:當粗時誤差較小時可以得到較好的定位精度;當粗時誤差較大時,定位誤差增大,定位結(jié)果出現(xiàn)較大偏差。這與文獻[7]中結(jié)果類似。可見粗時段導航中的線性化誤差不能忽略。
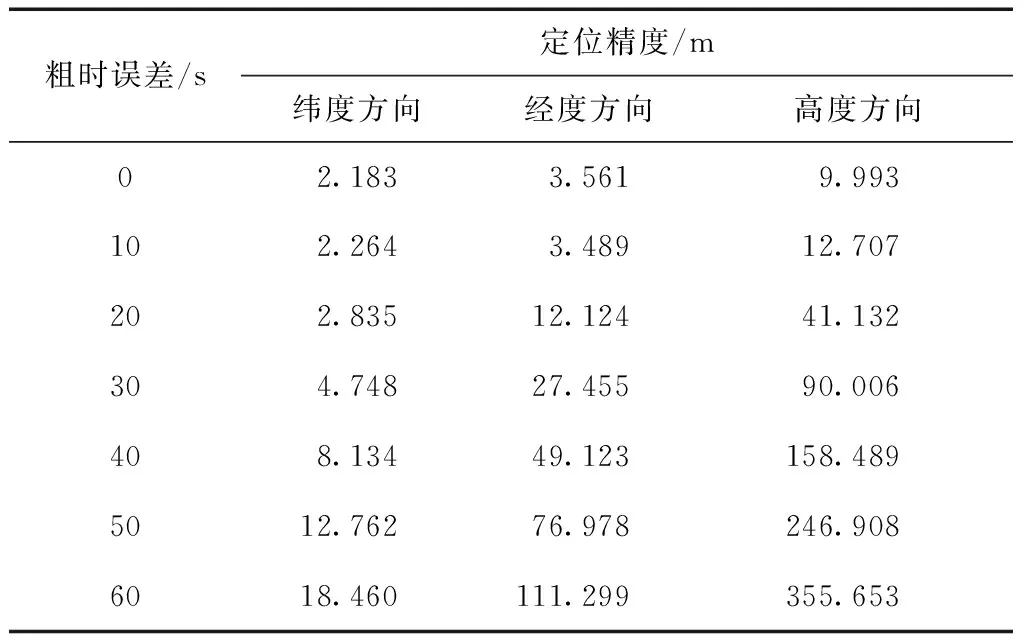
表1 不同粗時誤差下粗時段導航算法定位精度
2.2 粗時間精度衰減因子
粗時段導航由于在幾何矩陣H中多加了1個狀態(tài),進而影響了精度衰減因子,使得當衛(wèi)星數(shù)較少時粗時段導航幾何精度衰減因子(geometric dilution of precision,GDOP)比四狀態(tài)的GDOP大;而衛(wèi)星數(shù)較多時二者差距較小。由式(3)可以得到狀態(tài)更新量估計值
(9)
可見,定位誤差與幾何矩陣相關(guān)。而由于幾何矩陣增加了1個狀態(tài),會使得所有的DOP值大于或等于原來的值。定義GDOP[9]為
(10)
式中:G=(HTH)-1為權(quán)系數(shù)陣;trace()為求矩陣跡的運算。

(11)
式中:M=HTH;P=HTv;N=vTv。
進一步展開可得
(M-PN-1PT)-1=M-1+
M-1P(N-PTM-1P)-1PTM-1
(12)
由于式(12)右邊第二部分為半正定矩陣,其跡大于等于0;因此有
(13)

圖1 四狀態(tài)導航和五狀態(tài)粗時段導航可見衛(wèi)星數(shù)目和HDOP值比較
圖1展示了常規(guī)四狀態(tài)導航和五狀態(tài)粗時段導航各自的水平精度衰減因子(horizontal dilution of precision,HDOP)的對比,同時給出了可見衛(wèi)星數(shù)量的變化趨勢。從圖中可以看到五狀態(tài)促使到導航的HDOP總是大于或等于四狀態(tài)導航的HDOP,滿足理論分析。可用衛(wèi)星多的情況下二者HDOP接近,可用衛(wèi)星少時二者差距較大;從而導致五狀態(tài)粗時段導航定位誤差比傳統(tǒng)四狀態(tài)導航的定位誤差大:因此在解決粗時段導航問題時不能忽略DOP問題。
3 自適應(yīng)逐次逼近的粗時段導航算法
為了解決粗時段導航中的線性化誤差和DOP問題,以盡可能地提高其定位精度,本文提出一種自適應(yīng)逐次逼近的粗時段導航算法。在每次得到狀態(tài)更新解之后,重新計算衛(wèi)星信號發(fā)射時間,并重新計算衛(wèi)星位置和速度,更新幾何矩陣H,逐次逼近最終解,解決線性化誤差。在五狀態(tài)解算完成之后,檢驗衛(wèi)星數(shù)和DOP,如果不滿足要求,自適應(yīng)推入四狀態(tài)導航方程重新解算,解決DOP問題。圖2給出了該算法的實現(xiàn)流程。
算法具體步驟如下:
1)由輔助網(wǎng)絡(luò)得到先驗位置和一個粗略的時間作為初始解,設(shè)初始公共偏差為0。
2)利用當前的時間解和重構(gòu)的全偽距計算各衛(wèi)星信號發(fā)射時間,并由輔助星歷計算各衛(wèi)星的位置、速度、衛(wèi)星時鐘偏差速率和偽距誤差校正量。再利用當前用戶位置解和衛(wèi)星位置計算預(yù)期偽距,計算誤差校正后的測量全偽距。

圖2 自適應(yīng)逐次逼近的粗時段導航算法流程
3)對式(3)引入加權(quán)系數(shù),使得其誤差的方差進一步減小,可得
WH·δx=Wδρ
(14)

δx=(HTCH)-1H-1C·δρ
(15)
式中:C=WTW;H為改進的五狀態(tài)幾何矩陣。五狀態(tài)幾何矩陣H表示為
(16)

也就是說,在每次最小二乘運算迭代時會根據(jù)當前計算得到的用戶位置解和時間解更新五狀態(tài)幾何矩陣H各參數(shù)。同理,每次迭代時的偽距殘差為
(17)

4)計算后驗殘差,如果足夠小,則輸出當前解最后用戶的位置和時間解結(jié)果;否則,根據(jù)當前解重新計算各衛(wèi)星信號發(fā)射時間,返回步驟2)。
5)由于五狀態(tài)導航的DOP值始終大于或等于四狀態(tài)導航;當由上述加權(quán)五狀態(tài)粗時段導航方程求得用戶位置和時間解之后,將其解結(jié)果作為四狀態(tài)的初始狀態(tài),進行四狀態(tài)導航方程解算。文獻[10]表明,當衛(wèi)星發(fā)射時間精確到10 ms以內(nèi)時可以保證四狀態(tài)導航方程有效;從而可以通過將五狀態(tài)粗時段導航方程再次推入到四狀態(tài)導航方程中進行解算,來降低粗時段導航中的各DOP值,進而提高定位精度。
4 實驗與結(jié)果分析
為了驗證自適應(yīng)逐次逼近粗時段導航算法的效果,本文進行了一系列實驗來進行驗證。采用自研多模多頻點GNSS信號采集器獲取實際環(huán)境中的GPS L1的靜態(tài)數(shù)據(jù)進行算法驗證實驗。
信號的采樣率為62 MHz,中頻為4.17 MHz。算法為每隔1 s獲取一次碼相位測量量,碼相位由高靈敏捕獲模塊得到,并經(jīng)過碼相位精化方法提高捕獲所得碼相位的精度。先驗位置給定為距離信號采集地點約430 m的位置,信號采集處的精確位置事先由高精度載波相位差分接收機測得,分別取粗時誤差為0、10、20、30、40、50、60 s來驗證本文算法在不同粗時誤差下的定位性能。
圖3給出了當粗時誤差為60 s時,自適應(yīng)逐次逼近粗時段導航算法在緯度、經(jīng)度和高度3個方向上的定位結(jié)果,并給出了與真值的對比。
圖4給出了粗時誤差為60 s時自適應(yīng)逐次逼近粗時段導航算法和無粗時誤差時四狀態(tài)導航定位結(jié)果的均方根誤差(root mean square error,RMSE)的對比。此處四狀態(tài)導航解算中所用碼相位結(jié)果與粗時段導航中所用碼相位相同。

圖3 粗時誤差為60 s時改進粗時段導航算法定位結(jié)果

圖4 粗時誤差60 s時自適應(yīng)逐次逼近粗時段導航與無粗時誤差四狀態(tài)導航定位精度對比
從圖3和圖4可以看出:自適應(yīng)逐次逼近粗時段導航在粗時誤差大到60 s時仍能獲得較高精度的定位結(jié)果;經(jīng)度和緯度方向上定位結(jié)果的RMSE均大約為2.2 m左右,高度方向上定位結(jié)果的RMSE大約為5.2 m左右,并且該定位結(jié)果與無粗時誤差時常規(guī)四狀態(tài)導航定位結(jié)果基本相同。可見,自適應(yīng)逐次逼近粗時段導航算法在有較大粗時誤差時仍能獲得與常規(guī)四狀態(tài)導航定位接近的較高的定位精度。
表2給出了在不同粗時誤差下,自適應(yīng)逐次逼近粗時段導航算法定位結(jié)果的RMSE之間的對比。
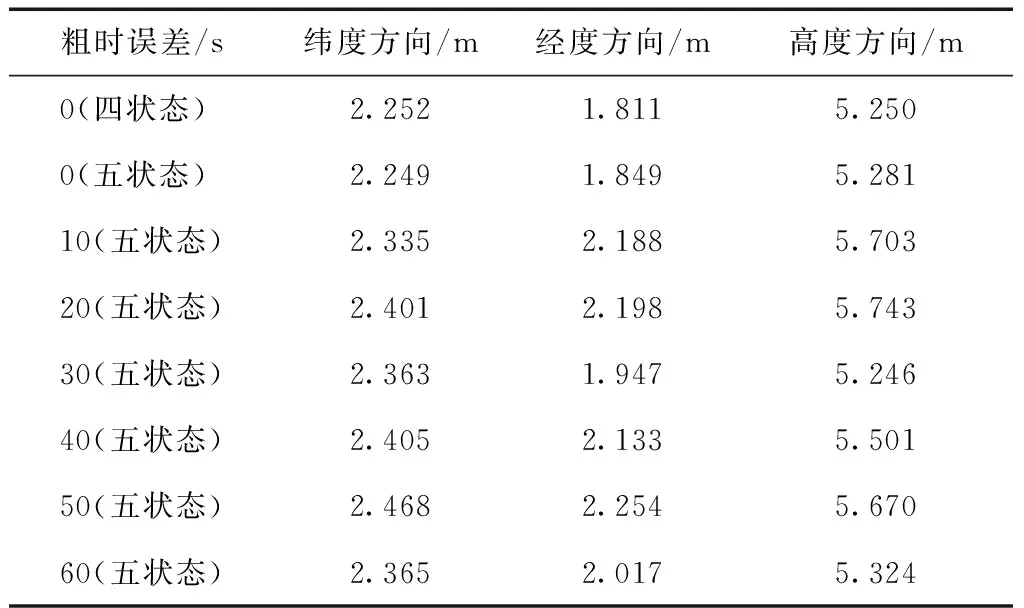
表2 不同粗時誤差下自適應(yīng)逐次逼近粗時段導航算法定位結(jié)果的RMSE
從表2可以看到:當粗時誤差從0~60 s變化時,自適應(yīng)粗時段導航算法都能夠獲得較高的定位精度;緯度和經(jīng)度定位結(jié)果的RMSE都在2.5 m以內(nèi),高度的RMSE在6 m以內(nèi),這與四狀態(tài)導航方程所得到的定位結(jié)果接近。這表明本文所提出的算法克服了在較大粗時誤差下粗時段導航存在的線性化誤差以及五狀態(tài)導航定位比四狀態(tài)導航定位DOP大的問題,獲得了較高的定位精度,保證了粗時段導航在大粗時誤差或者可用衛(wèi)星數(shù)較少時仍能獲得與常規(guī)定位解算接近的較好的定位結(jié)果。
5 結(jié)束語
本文針對GNSS導航定位中粗時段導航存在的大粗時誤差下線性化誤差問題和DOP問題,提出了一種自適應(yīng)逐次逼近的粗時段導航算法。在粗時段導航算每次迭代運算時,同時更新衛(wèi)星狀態(tài)和幾何矩陣,并在解算完成后自適應(yīng)推入四狀態(tài)導航算法重新解算,保證了在較大粗時誤差下或者衛(wèi)星數(shù)較少時粗時段導航仍可獲得較高的定位精度。通過采用實際GPS數(shù)據(jù)的相關(guān)實驗,驗證了該算法的有效性和可靠性。實驗的結(jié)果表明:自適應(yīng)逐次逼近的粗時段導航算法在0 s的粗時誤差下能夠獲得與常規(guī)四狀態(tài)導航算法近似的定位精度;緯度和經(jīng)度定位結(jié)果的RMSE在2.2和1.8 m左右,高度定位結(jié)果的RMSE在5.2 m左右,算法連續(xù)測試了20 min左右的數(shù)據(jù),具有連續(xù)可用性;隨著粗時誤差的增大,定位精度基本保持不變,在較大粗時誤差下仍能獲得與粗時誤差為0 s時接近的定位結(jié)果。
本文提出的自適應(yīng)逐次逼近粗時段導航算法使得在存在粗時間問題時GNSS導航定位方法仍然可行,并且在惡劣環(huán)境下,如大粗時誤差或可用衛(wèi)星少時,仍能得到較好的效果,擴展了粗時段導航的應(yīng)用場景,增大了GNSS導航定位的可用性。