點云數據特征提取
2018-08-29 11:20:10吳光榮饒智華
大經貿 2018年7期
關鍵詞:特征提取
吳光榮 饒智華
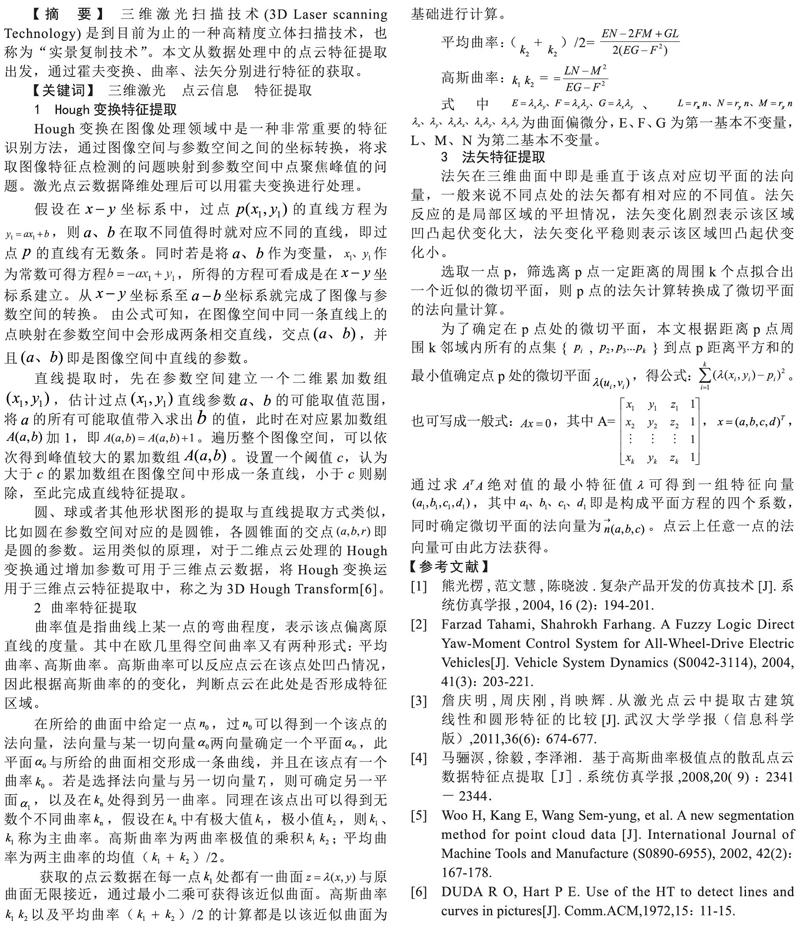
【摘 要】 三維激光掃描技術(3D Laser scanning Technology)是到目前為止的一種高精度立體掃描技術,也稱為“實景復制技術”。本文從數據處理中的點云特征提取出發,通過霍夫變換、曲率、法矢分別進行特征的獲取。
【關鍵詞】 三維激光 點云信息 特征提取
1 Hough變換特征提取
Hough變換在圖像處理領域中是一種非常重要的特征識別方法,通過圖像空間與參數空間之間的坐標轉換,將求取圖像特征點檢測的問題映射到參數空間中點聚焦峰值的問題。激光點云數據降維處理后可以用霍夫變換進行處理。
【參考文獻】
[1] 熊光楞,范文慧,陳曉波.復雜產品開發的仿真技術[J]. 系統仿真學報, 2004, 16 (2): 194-201.
[2] Farzad Tahami, Shahrokh Farhang. A Fuzzy Logic Direct Yaw-Moment Control System for All-Wheel-Drive Electric Vehicles[J]. Vehicle System Dynamics (S0042-3114), 2004, 41(3): 203-221.
[3] 詹慶明,周慶剛,肖映輝.從激光點云中提取古建筑線性和圓形特征的比較[J].武漢大學學報(信息科學版),2011,36(6):674-677.
[4] 馬驪溟,徐毅,李澤湘.基于高斯曲率極值點的散亂點云數據特征點提取[J].系統仿真學報,2008,20( 9) : 2341 - 2344.
[5] Woo H, Kang E, Wang Sem-yung, et al. A new segmentation method for point cloud data [J]. International Journal of Machine Tools and Manufacture (S0890-6955), 2002, 42(2): 167-178.
[6] DUDA R O, Hart P E. Use of the HT to detect lines and curves in pictures[J]. Comm.ACM,1972,15: 11-15.
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
