艦船綜合電力系統機內測試研究
2018-08-24 07:49:20,,,
計算機測量與控制 2018年8期
,, ,
(海軍工程大學 電氣工程學院,武漢 430033)
0 引言
艦船綜合電力系統是由中國工程院院士,海軍工程大學教授馬偉明于2002年提出的,通過集成艦船的發供電、負載用電和推進用電等,實現艦用電能的統一調配和集中控制。相對于以熱機為核心的常規動力系統,具有集成度高、噪聲小、方便電能的調配等優勢,因而得到了迅速發展,廣泛應用于民用船舶和軍用艦艇上,逐漸成為艦船推進的主動力系統。當前我國艦船綜合電力系統已由第一代發展到第二代,即二代綜合電力系統,這一技術目前領先于歐美科技強國。圖1為某型艦船發電機系統結構示意圖。
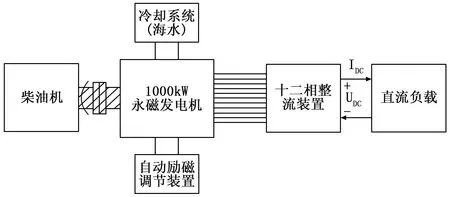
圖1 某型艦船發電機系統結構圖
隨著艦船綜合電力系統集成化和自動化水平的不斷提高,電氣網絡拓撲結構越來越復雜,艦用高性能武器種類和數量不斷增加,給武器裝備的維修保障帶來了巨大的困難和挑戰,尤其對于赴遠海執行任務的海軍艦艇,一旦發生故障,后果將不堪設想,因此,如何提高艦員級維修保障能力,具有重要的軍事應用價值。
測試性[1-3]是武器裝備“六性”之一,是系統或設備本身的一種固有屬性。根據GJB2547《裝備測試性大綱》中的定義為:系統或設備能夠及時、準確地確定其狀態(可工作,不可工作或性能下降)并隔離其內部故障的一種設計特性。按照測試方式的不同,測試性技術主要可以分為外部自動測試(ATS)和機內測試(BIT)。外部自動測試是指通過外部測試儀器、工具或設備對被測對象進行檢測和隔離的測試,機內測試又叫嵌入式測試,是指系統或設備能夠完自己成對系統、組件或功能模塊的狀態檢測、故障診斷以及性能測試。
當前,我國海軍艦艇還沒有裝備系統級BIT設備,但對部分小型系統或現場可更換單元(LRU)的測試性設計工作已經展開并取得了一定的研究成果,如海軍工程大學研制的十二相不控整流器測試裝置,能夠將故障模式精確定位到任意二極管上,從而實現對故障模塊的故障隔離,提高裝備的使用性和安全性。
1 國內外研究現狀
1.1 國外研究現狀
在測試性設計領域,國外一直處于領先地位,尤其是美國,不論是測試性概念的提出,還是測試性設計準則的制定,均由美國主導并首先將BIT應用到武器裝備系統中去,大大提高了裝備作戰性能。如美國海軍成功將BIT技術應用到一代綜合電力系統中,可以實現對電力系統的狀態檢測、故障診斷和故障隔離,極大地提高了其作戰能力。圖2為國外BIT技術的大致發展歷程[4]。
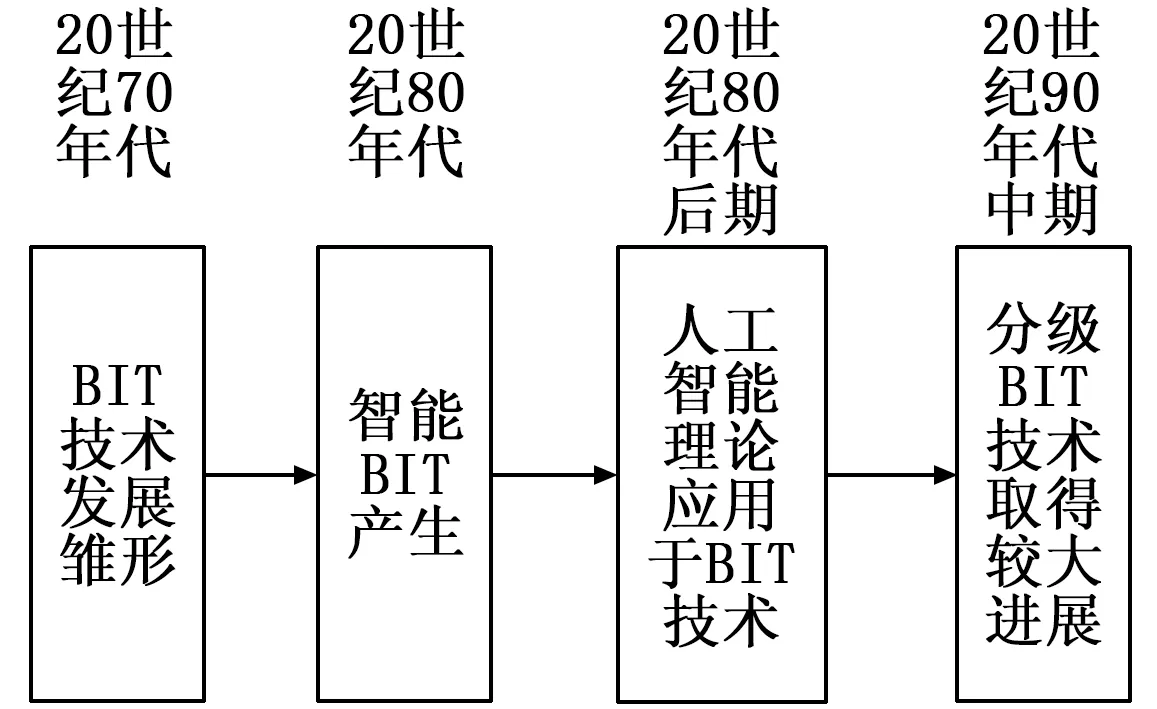
圖2 國外BIT發展歷程
1.2 國內研究現狀
我國BIT技術雖然起步較晚,但也取得了一定的研究成果。國防科技大學在“九五”期間深入研究了邊界掃描機內測試技術,建立了智能BIT的理論框架和體系結構,提出了基于邊界掃描的智能BIT結構和故障診斷方法;電子科技大學提出了基于CAN總線的復雜電子系統BIT技術方案,對BIT和ATE相結合的綜合測試系統進行了預先研究;航天測控開發技術有限公司提出了基于邊界掃描和BIST(Built-In Self-Test)相結合的電路板測試方法,研究了邊界掃描技術在電路板測試性設計中的應用等[5]。當前,我國已將測試性設計作為武器裝備研發過程中必不可少的一個環節,隨著國家的重視和研究的深入,BIT技術在不同領域的應用研究必將引起國內外學者的廣泛關注。
2 BIT參數
反映BIT設計特性的主要參數有:性能參數、時間參數和限制性參數,如圖3所示。
2.1 性能參數
故障檢測率(FDR)[6]定義為在規定的時間內,用規定的方法正確檢測到的故障數與被測單元發生的故障總數之比,用百分數表示。
故障隔離率(FIR)定義為在規定的時間內,用規定的方法正確隔離到不大于規定的可更換單元數的故障數與同一時間檢測到的故障數之比,用百分數表示。
2.2 時間參數
故障檢測時間(FDT)定義為從開始故障檢測到給出故障指示所經歷的時間。
故障隔離時間(FIT)定義為從開始隔離故障到完成故障隔離所經歷的時間。
2.3 限制性參數
虛警率(FAR)定義為在規定的工作時間內,發生的虛警數與同一時間內的故障指示總數之比,用百分數表示。
重測合格率(RTOKR)定義為在規定的時間內,在基地級維修的測試中,發現因“報告故障”而拆卸的產品是合格的產品數與被測產品總數之比,用百分數表示。
故障檢測率、故障隔離率和虛警率是機內測試(BIT)的主要性能指標。在艦船綜合電力系統的測試性設計中,首先關注的是故障檢測率FDR,保證艦船裝備的可靠性和安全性,其次,要降低虛警率和重測合格率,減少檢測時間,提高檢測效率。參考國內外測試性要求,對艦船綜合電力系統定量要求如下:系統針對單一故障檢測率(FDR)要求在95%以上;故障隔離率(FIR)要求在90%以上。由于項目來源于研究性課題,對虛警率等其他性能指標不做明確要求。
3 艦船綜合電力系統機內測試
本節對某型艦船綜合電力系統進行機內測試的探索和研究,使該型艦船電力系統具有在線監測、故障診斷和故障隔離的功能。由于艦船綜合電力系統結構和內部工作環境的復雜性,對艦船綜合電力系統所有故障模式實現狀態監測與故障診斷十分困難,因此,本文首先對系統進行了層次劃分,將系統分為了發電機本體、勵磁系統和整流系統3個部分,并從工程可行的角度對各分系統典型故障模式進行研究分析,建立各分系統系統的故障模式統計表,確定了測試參數和相應的故障判斷準則。
3.1 某型艦船綜合電力系統的建模
3.1.1 發電機模型
該型艦船綜合電力系統采用十二相整流混合勵磁同步發電機(以下簡稱混合勵磁發電機)發電[7],經十二相不控整流后外接直流負載,或先通過十二相不控整流變成直流電,再經三相逆變器逆變后通入交流負載。混合勵磁發電機的二維結構如圖4所示。

圖4 混合勵磁發電機二維結構圖
由圖4可以看出,發電機沿軸向分為全永磁部分和輔助部分,全永磁部分位于發電機中部,輔助部分位于發電機兩側。在定子鐵芯內布置兩組環形勵磁繞組,串聯后構成輔助電勵磁繞組,定子鐵芯由三段硅鋼片疊壓組成,電樞繞組貫穿整個定子,定子鐵芯外圓套有導磁套筒,為輔助勵磁繞組提供軸向磁路。
輔助電勵磁系統[8]中的自動勵磁調節器(AVR)采用PI算法,通過電壓互感器采集到的電壓值與設定的輸出電壓值進行比較,調節IPM功率模塊中IGBT的占空比,實現對勵磁電流大小和方向的雙向調節。IPM功率模塊主電路如圖5所示。

圖5 勵磁控制器主電路
3.1.2 勵磁系統模型
勵磁系統分為永磁體勵磁和輔助電勵磁兩部分,其中電勵磁系統采用自并勵勵磁方式,從十二相交流電種取三相經勵磁變壓器降壓,然后通入三相不控整流器整流,所得的直流電經過功率模塊調節大小與方向后通入勵磁繞組實現對同步發電機的電勵磁。輔助電勵磁系統的結構如圖6所示。
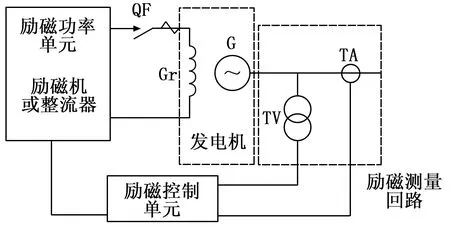
圖6 電勵磁系統結構圖
3.1.3 整流系統
該型艦船綜合電力系統中所用的整流方式為不控整流,因此整流系統的核心是十二相不控整流器,其內部結構如圖7所示。

圖7 十二相不控整流電路結構圖
綜上分析,可得整個艦船綜合電力系統的結構如圖8所示。

圖8 系統框圖
3.2 艦船綜合電力系統故障模式分析
本文將艦船綜合電力系統分成3個分系統,分別是發電機本體、勵磁系統和整流系統,下面將分別對3個分系統進行故障模式分析。
1)發電機本體:根據混合勵磁電機本體的結構,發電機本體的故障模式主要可以分為定子故障、轉子故障和冷卻系統故障。具體如表1所示。

表1 發電機本體故障模式
2)勵磁系統:根據勵磁系統的結構圖,可將勵磁系統的故障模式主要分為三相勵磁變壓器故障、三相不控整流器故障、勵磁調節器故障、電壓互感器故障、電流互感器故障及滅磁回路故障等,具體如表2所示。
3)整流系統:整流部分采用十二相不控整流,內部有24個二極管和熔斷器,由此可得整流系統的故障模式如表3所示。

表2 勵磁系統故障模式

表3 整流系統故障模式
3.3 各功能模塊測試性分析
1)發電機本體測試性分析:混合勵磁發電機(以下簡稱發電機)本體作為整個艦船綜合電力系統的核心設備,其運行狀態的好壞直接影響系統的可靠性和安全性,因此對發電機本體進行機內測試性非常重要。由于發電機本體內部結構和環境的復雜性,獲取的信號中常常帶含有許多噪聲信號,而且同一故障特征量可能對應多種故障模式,這使得對發電機內部故障進行精確的狀態監測、故障診斷和故障隔離變得非常困難。本文主要從工程可行的角度來實現對發電機機內測試設計。主要測量的物理量有溫度和電流[9-10]。對于定子繞組和輔助電勵磁繞組,主要采取監測繞組溫度的方法進行故障檢測,對于永磁體則主要利用測量探測線圈中電流的大小來判斷永磁體是否失磁,具體測試點和所用傳感器如表4所示。
2)勵磁系統測試性分析:勵磁系統是發電機組運行安全性和可靠性的重要保障,對電力系統的穩定運行起著至關重要的作用。對三相勵磁變壓器和滅磁開關,主要通過開關量判斷其狀態,開關閉合則指示燈亮,開關斷開則指示燈熄滅。對于勵磁調節器、電壓互感器和電流互感器,可以通過手動測試來判斷其是否有故障,人為改變負載的大小,看輸出電壓穩定后是否能保持不變。對于三相不控整流器,通過DSP在一個采樣周期內對6個二極管進行多次電壓采樣,在一定的時間內計算出采樣電壓的平均值與0比較,如果恒為0,則說明對應的二極管發生了短路故障,如果大于零,則說明對應的二極管發生了開路故障。另外,勵磁系統還存在發電機過電壓、勵磁過電流、勵磁電流過小等功能故障,對這些功能故障模式可采取實時狀態監測的方法來確保系統的正常運行。具體測試點及門限值如表5所示。
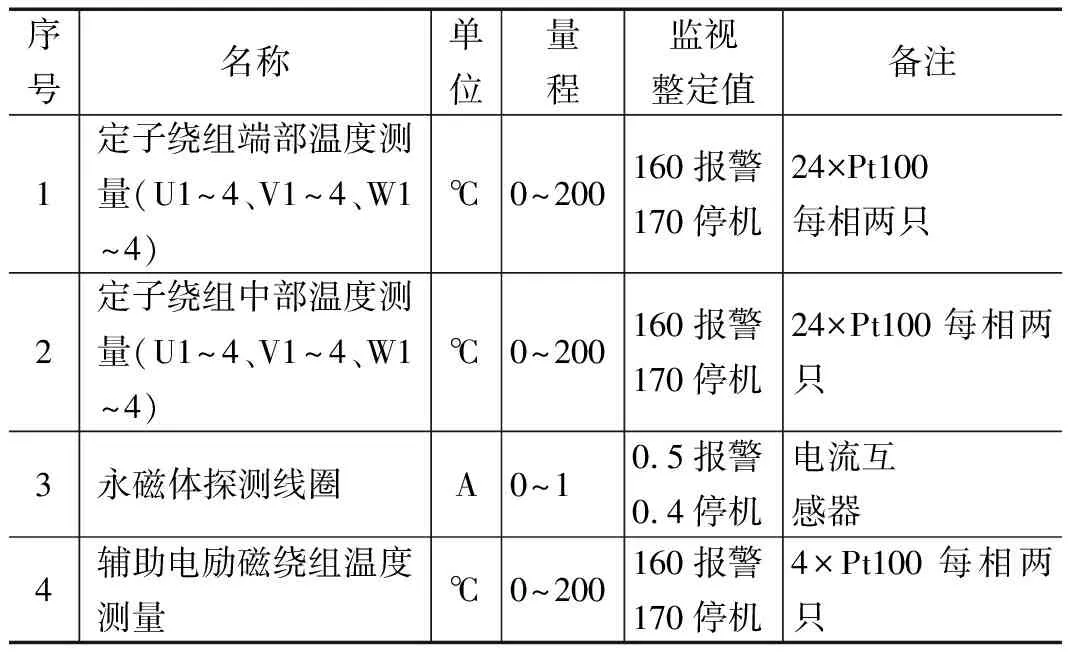
表4 發電機本體測試點分析
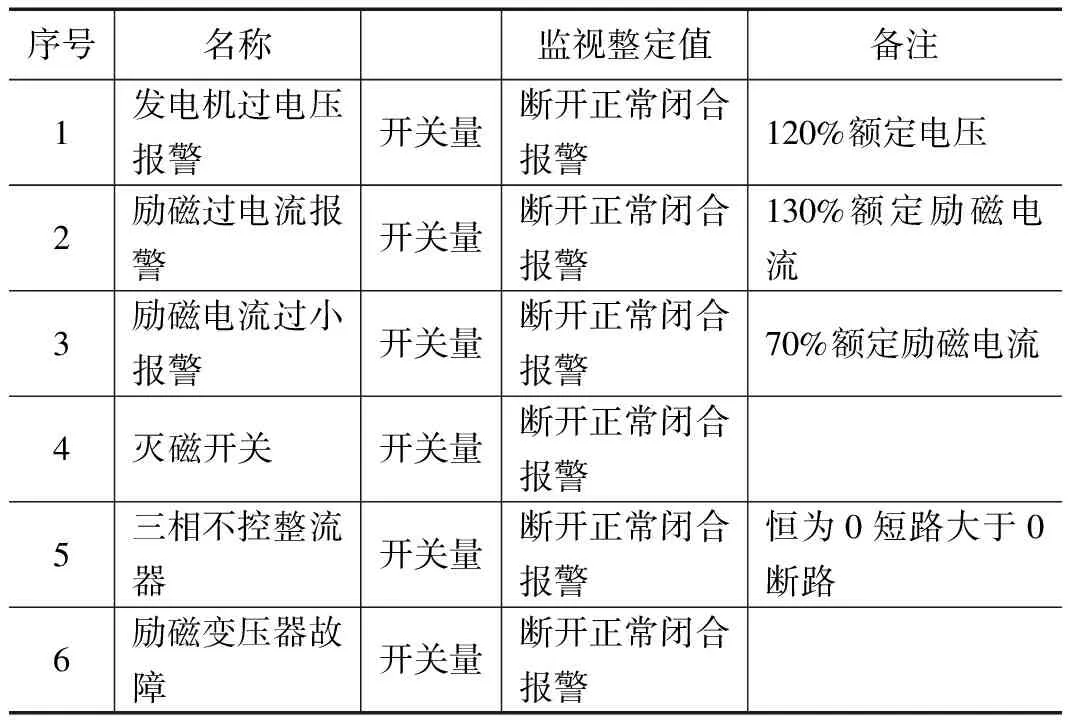
表5 勵磁系統測試點分析
3)整流系統:整流系統的作用是將發電機發出的12相交流電變成直流電,然后通入直流負載。對十二相不控整流器進行測試性設計與三相不控整流器類似,通過DSP在一個采樣周期內對24個二極管進行多次電壓采樣,取平均值后與0進行比較,若恒為0,則說明對應的二極管短路,若大于0,則說明對應的二極管斷路。
3.4 故障檢測與隔離
通過對發電機本體、勵磁系統和整流系統的故障模式和測試性分析,確定了各組成模塊的測試性參數和測試點[11],為系統的狀態監測、故障檢測和隔離甚至故障預測提供了理論基礎。
3.4.1 狀態監測
根據系統測試性需求,對艦船綜合電力系統的關鍵性能或功能參數進行實時監測,并能夠實時顯示報告給艦員,同時還能夠存儲記錄大量的數據。根據此要求可以設計系統的狀態監測流程如圖9所示。
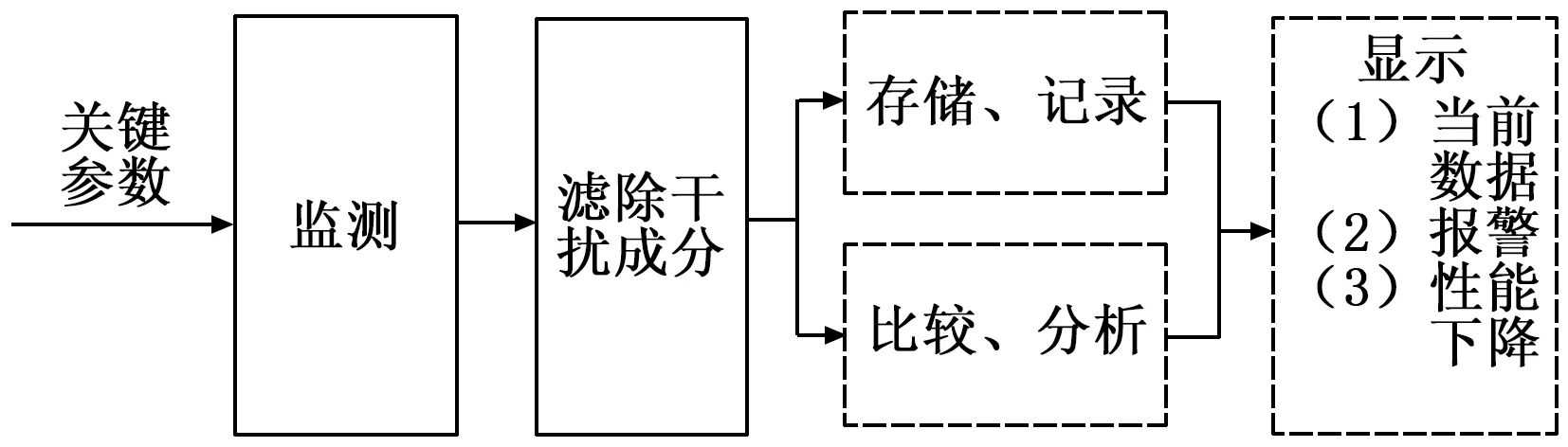
圖9 狀態監測流程圖
圖中的關鍵參數即為表4、表5中的溫度、電壓和電流參數。
3.4.2 故障檢測
故障檢測用于判斷系統的各個組成模塊是否發生故障,檢測到故障時給出相應的指示或報警,在故障檢測設計中,要特別注意防止虛警,常用的防虛警方法有3中:1)確定合理的門限值;2)確定合理的故障指示和報警條件;3)采取綜合決策方法。本文根據多次試驗針對某型艦船綜合電力系統的具體情況確定了合適的門限值,并通過DSP控制平臺,采取多次采樣取平均值的方式,有效減少了虛警的發生概率。故障檢測分為主動和被動兩種方式,為了不影響系統的正常運行,本文的故障檢測采取被動式設計方式。具體流程如圖10所示。
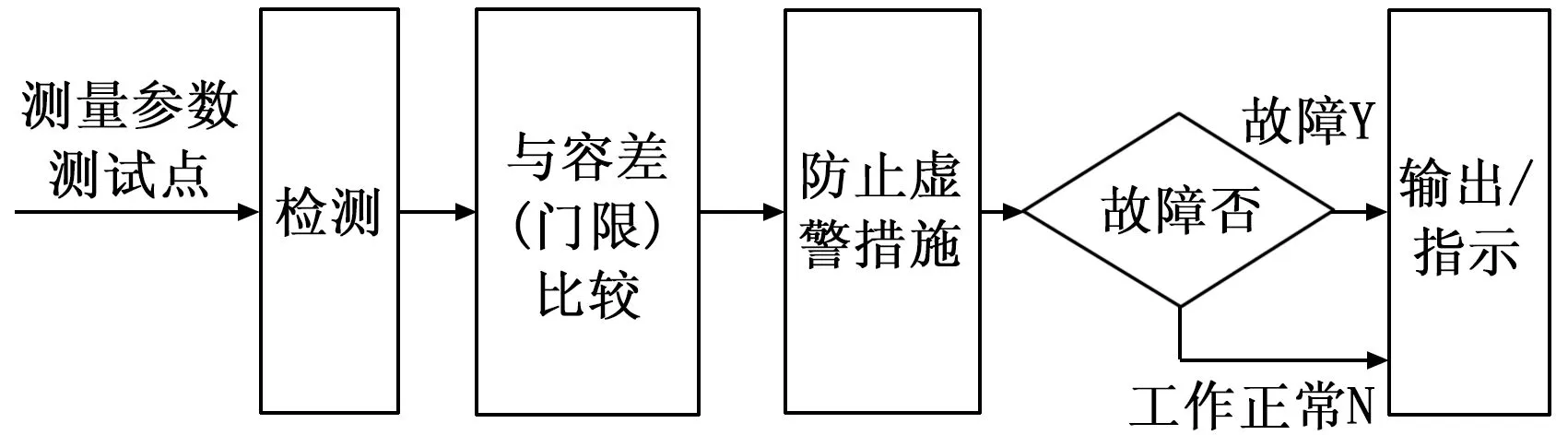
圖10 被動式故障檢測流程圖
圖中的測量參數為狀態監測環節的采樣信號經過濾波后所得到的測試信號。
3.4.3 故障隔離
在檢測到系統中某個模塊發生故障后,應該考慮將該模塊與系統隔離。用機內測試進行故障隔離時,需要測量被測對象內部更多的參數,才能將故障定位到分系統的現場可更換單元。具體的故障隔離流程如圖11所示。
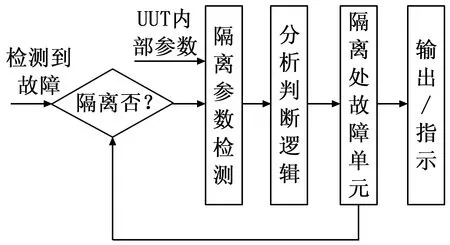
圖11 故障隔離流程圖
圖中輸入為故障檢測環節檢測出的故障模式。
3.5 測試性設計框架
綜合上述分析,將艦船綜合電力系統劃分為發電機本體、勵磁系統和整流系統3個部分。每個分系統由各個功能模塊組成,通過對對每個功能模塊進模塊BIT設計,使系統具有模塊級的故障診斷和隔離功能。整個系統采用分布—集中式設計,各個模塊的狀態監測、故障檢測和隔離相互獨立,互不影響,較復雜的分系統如發電機本體和勵磁系統可以采用分布式BIT設計,系統整體上采用集中式故障處理和報警顯示,利用專用測試總線進行BIT信息通信,集中顯示各個模塊的健康狀況[12-13],方便操作人員的使用。系統詳細機內測試框架如圖12所示。
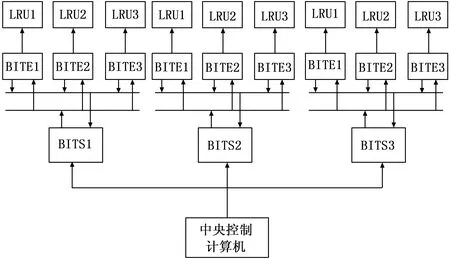
圖12 系統機內測試框架圖
4 結論
本文通過對某型艦船綜合電力系統進行了建模和測試性分析,確定了該型艦船綜合電力系統的主要故障模式、測試點以及測試參數。從工程可行的角度提出了系統機內測試設計與分析方法,詳細說明了系統狀態監測、故障診斷和故障隔離的設計流程,得到了系統最終的機內測試框架圖,對后續型號艦船綜合電力系統的機內測試與故障診斷工作具有重要的參考價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
