“擷抗式”SMA驅動器的設計及在變厚度機翼中的應用
2018-08-23 08:54:14楊開元
中國設備工程 2018年16期
關鍵詞:變形
楊開元
(濟寧市兗州區第一中學,山東 濟寧 272100)
1 緒論
1.1 變厚度機翼
變體機翼是指飛行器機翼在飛行過程中,為了根據不同的飛行環境做出響應,通過改變機翼的一些部件的幾何形狀、尺寸或者位置,使得機翼具備不同的形狀從而改變飛行姿態,以獲得更好的飛行性能。根據不同的飛行環境,變體機翼可以通過驅動器調節不同參數,比如前緣位置、后緣位置、弦線弧度和翼型厚度等。變厚度機翼是通過機翼上表面的蒙皮變形,改變機翼的相對厚度,從而改變機翼的氣動特性。巡航飛行時,增加機翼的相對厚度,保證飛行器的升力系數,減小油耗,增加航程;加速飛行時,減小機翼的相對厚度,降低飛行器的超速度波阻,提高飛行器的機動性能。
1.2 形狀記憶合金
形狀記憶合金(shape memory alloy,簡稱SMA)是能夠記憶其初始形狀的智能材料。SMA受益于其獨特的形狀記憶效應而廣泛應用于變體飛行器、變循環發動機和衛星等領域。形狀記憶效應是指當SMA處于低于其相變溫度的環境時,對其加載并卸載并存在殘余應變,此時對SMA加熱至相變溫度之上,殘余應變會消失,SMA完全恢復到加載前的形狀。利用形狀記憶效應,SMA驅動器不僅能夠輸出大驅動力和大驅動位移,還具有主動變形功能和較高的功重比。傳統的變體機翼驅動器普遍采用的是液壓驅動器和電機驅動,這兩類驅動器由于其結構和控制系統復雜,功重比較低,可靠性低且維護成本高,已經逐漸被智能驅動器所取代。因此,SMA驅動器成為了設計變體機翼驅動結構的重要技術手段。
2 “擷抗式”SMA驅動器設計
2.1 “擷抗式”SMA驅動器結構設計
本文利用形狀記憶合金絲的形狀記憶效應和主動變形的特點設計了擷抗式”SMA驅動器。“擷抗式”SMA驅動器的結構如圖1所示。圖1(a)是組成“擷抗式”SMA驅動器的一個驅動單元,該驅動單元由兩根SMA絲、定滑輪,鉸鏈組成。SMA絲一端固定在固定端,另一端通過鉸鏈相與另一根SMA絲相連接,其中鉸鏈呈90°纏繞在定滑輪上,并可以在定滑輪上自由滑動。所謂“擷抗式”(如圖1(a)所示),是指驅動單元的兩組SMA絲呈對拉狀態。兩組SMA絲有各自的加熱電路,當通電加熱SMA-1絲時,SMA-1絲受熱收縮,拉動定滑輪轉動,同時產生的拉力會將SMA-2絲拉長;相反地,當通電加熱SMA-2時,SMA-2受熱收縮,順時針拉動定滑輪轉動,同時產生的拉力會將SMA-1絲拉長。
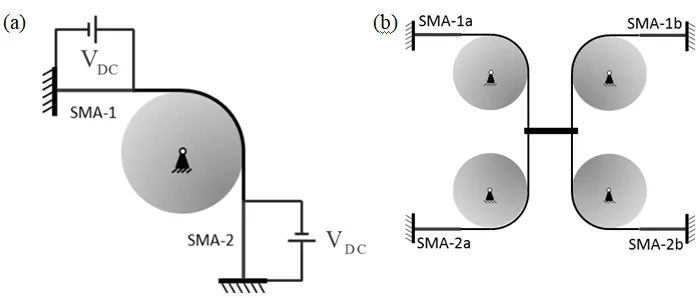
圖1 “擷抗式”驅動器
“擷抗式”SMA驅動器的結構如圖1(b)所示,該驅動器由四個驅動器單元組成并進行了適當改進。為了實現“擷抗式”的驅動原理,本文將四個驅動單元分為兩組,分別位于橫桿的上、下方,并呈現對稱分布。四組SMA絲與鉸鏈相連接,一端固定在固定端,另一端通過繞過定滑輪的鉸鏈與橫板相連接。橫板上方有兩組SMA絲和一組定滑輪,成對稱分布,橫板下方有同樣兩組SMA絲和一組定滑輪,呈對稱分布。
2.2 “擷抗式”SMA驅動器原理
“擷抗式”SMA驅動器的原理是利用SMA的形狀記憶特性,通過兩組SMA絲帶動橫板運動,以此來實現往復、連續驅動。如圖所示,“擷抗式”SMA驅動器具體的工作原理如下。
(1)首先,當需要橫板向上運動時,利用電流加熱被預拉伸處理的SMA-1a絲和SMA-1b絲(預拉伸的長度需要根據SMA絲的回復性能確定),使其受熱收縮從而拉動橫板向上運動,此時輸出向上的驅動力和驅動位移。同時橫板的向上運動會將下方SMA-2b絲和SMA-2b絲拉伸一定長度,即對下方的SMA絲進行了預拉伸處理。
(2)然后,需要橫板向下運動回到初始位置時,利用電流SMA-2a絲和SMA-2b絲,使其受熱收縮從而拉動橫板向下運動并回到初始位置,此時輸出向下的驅動力和驅動位移。同時橫板的向下運動會將下方SMA-1b絲和SMA-1b絲拉伸回到初始長度,即下方的SMA絲回到了預拉伸狀態。至此,驅動器恢復到初始狀態,實現了驅動器的往復驅動。
(3)最后,重復(1)~(2)可以實現連續、往復驅動。
3 變體機翼的設計
3.1 變厚度機翼的設計思路
變體機翼需要驅動器提供驅動力和驅動位移來改變某個部件的形狀、位置或者尺寸。本文將“擷抗式”SMA驅動器安裝在常規機翼中,利用驅動器提供的豎直方向驅動力和驅動位移來驅動機翼蒙皮改變蒙皮弧高。
3.2 變厚度機翼的結構
本文利用三個“擷抗式”SMA驅動器驅動蒙皮改變弧高。三個驅動器(A、B、C)均勻分布,可以使蒙皮的變形光滑連續,避免出現局部變形過大,影響氣動性能。變厚度機翼的結構如圖2所示,每組驅動器的橫板上安裝豎直推桿,推桿與蒙皮相連,可以將橫板輸出的驅動力和驅動位置傳遞給蒙皮,驅動蒙皮改變孤高。需要指出的是,每個驅動器的安裝位置不同,所以推桿的長度也不同,需要根據蒙皮的弧線進行設計。
3.3 變厚度機翼的原理
本文提出的變厚度機翼具有主動變形、往復變形和變形光滑柔順的特點,且工作簡單,切換加熱電路即可實現機翼厚度的增加和降低。如圖2所示,變厚度機翼的具體工作原理為:當飛行條件改變,需要增加機翼厚度時,通過電流加熱驅動器上方的SMA絲,使得其受熱收縮并帶動推桿向上運動,同時將下方的SMA絲進行拉伸,此時機翼蒙皮在多組驅動器推桿的驅動下升高,使得機翼的蒙皮弧線增加高度;當飛行條件改變,需要降低機翼厚度恢復初始厚度時,通過電流加熱全部驅動器下方的SMA絲,使得其受熱收縮并帶動其所在驅動器的推桿向下運動,同時將上方的SMA絲拉伸至初始狀態,此時機翼蒙皮在多組驅動器推桿的驅動下降低高度,使得機翼恢復到初始厚度。
此外,除上述兩種主要工作狀態以外,變厚度機翼可以選擇性地使驅動器A、B、C中某個或某幾個工作,通過不同的驅動器組合方式,可以使機翼蒙皮具有更復雜多樣的高度,從而使機翼具有多種厚度,可以適應更復雜多變的飛行環境。

圖2 變體機翼的設計
4 結語
本文首先利用形狀記憶合金設計了一種新型的“擷抗式”SMA驅動器,然后利用該驅動器驅動調節變體機翼的機翼厚度變化,以滿足飛行器在不同飛行環境下的氣動性能需求。本文得到的主要研究內容如下。
(1)本文利用形狀記憶合金的主動變形性能,設計了一種能夠主動變形、可往復驅動的“擷抗式”SMA驅動器。
(2)利用“擷抗式”SMA驅動器驅動變體機翼的變厚度調節,且為變體機翼帶來了主動變形、變形光滑柔順的特點。

猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36