水產養殖水下作業機器人關鍵技術研究進展
2018-08-22 03:17:46李道亮包建華
農業工程學報 2018年16期
李道亮,包建華
(1. 中國農業大學信息與電氣工程學院,北京 100083;2. 江蘇師范大學電氣工程及自動化學院,徐州 221116;3. 北京農業物聯網工程技術研究中心,北京 100083)
0 引 言
隨著全球人口增長,資源短缺和環境惡化問題愈發突出,陸地資源已難以充分滿足社會發展的需求,3.6×108km2的浩瀚海洋將成為人類生存與發展的新空間,是人類食物的重要來源,也是增加人類優質蛋白質的“糧倉”[1]。中國大陸海岸線長約1.8×104km,中國內海和邊海的海域面積473×104km2,淺海面積200×104km2,是世界最大的海水養殖大國,養殖面積和產量均占世界的60%[2],為中國和世界食物安全做出了重大貢獻。
淺海養殖包括筏式養殖、底播增養殖、海水網箱養殖,淺海養殖產量占中國海水養殖產量的95%以上[3]。淺海養殖的水下作業包括筏式養殖鮑魚、藻類的生長狀況監測,底播增養殖貝類、海參等的收獲,網箱清洗、網箱養殖死魚撿拾(不及時撿拾會導致魚類病害傳播和水體污染)和網衣漏洞檢測等。目前,這些作業任務需要人工完成,由于潛水員下潛深度有限,水產養殖區域范圍大,潛水員體力難以達到,工作強度大,人工一天最多下水工作10 h,受海況、水深和海流等自然條件影響,作業人員很容易發生事故,而且容易患潛水病,危險系數高[4],近幾年愿意從事該行業的人越來越少,水產品養殖的勞動力成本猛增,淺海養殖水下作業面臨嚴重的人工危機[5],直接威脅中國水產養殖產業發展。
利用現代技術改造傳統水產養殖業,促進工業化和信息化向水產養殖領域的深度融合,對于提升水產養殖業的效率與品質具有非常重要的意義[6]。由于水下生產環境的復雜性,研究水下機器人在水產養殖中的應用逐步受到重視[7]。作為人類探索海洋的工具,水下機器人是先進機器人技術在水下的特殊應用,是機械、控制、信息、導航、船舶等學科相結合的前沿技術領域[8]。
水下機器人也稱為無人水下潛水器(unmanned underwater vehicle,UUV),它可以在水下代替人完成某種任務。按照與水面支持系統間聯系方式的不同,水下機器人可以分為遙控水下機器人(remotely operated vehicle,ROV)和自治水下機器人(autonomous underwater vehicle,AUV)2類。ROV通過“臍帶”電纜接受來自水面平臺的遙控命令與動力電源;AUV擁有動力能源和智能控制系統,它能夠依靠自身的自主決策和控制能力高效地完成預定任務[9]。水下機器人在世界范圍內的應用領域已經不斷擴大,如電纜敷設和檢查、海底礦藏調查、救撈作業、水下考古、水產養殖、水環境監測及江河水庫的大壩檢查等[10]。
在水產養殖實踐中,人們首先將水下機器人應用于水產養殖監測。將聲納傳感器搭載于水下機器人,根據深水網箱規格預設好水下機器人的巡視路線,該巡視路線就是一條警戒帶,在這個警戒帶內,如果因網箱的網衣破損而出現透魚現象的發生,機器人就會向管理人員發出警報。這種監測方式機動性強,準確度高[11]。溶解氧是池塘養殖的重要制約因子,為提高魚塘增氧范圍和增氧效率,張凈等[12]開發一種智能行走式增氧機器人,通過電機驅動葉輪將空氣中氧氣壓入水體中進行增氧。Rundtop和 Frank[13]將超短基線(ultra short base line,USBL)系統、多普勒測速計(Doppler velocity log,DVL)用于水下機器人的導航,可以實現對圍網網衣的自主可靠檢查。水下機器人用于圍網檢查中,機器人本體相對圍網的位姿估算是關鍵問題之一;Duda等[14]通過對相機拍攝圖像中網衣結點及其拓撲結構的檢測,能夠方便估算出水下機器人相對圍網的距離和方位。
相對于監測任務,水下機器人應用于水產養殖作業任務(如海參收獲、死魚撿拾等)將更具挑戰性。近年來,水下機器人載體與所攜帶機械手構成一種新型的水下機器人-機械手系統(underwater vehicle - manipulator system, UVMS),水下自主作業技術已經成為水下機器人的重要研究方向之一[15]。UVMS的機器人本體與其操作機械手之間存在著耦合關系,其耦合控制不僅受到動量守恒的影響,而且受到水動力的影響,是一個多體動力學系統,該系統在漂浮情況下的建模與控制非常復雜[16]。與此同時,水產養殖水下作業環境復雜、光線昏暗、洋流時變、目標動物(海參、死魚)等規格形狀不一,同時撿拾作業的精度和速度要求高,如何快速識別目標動物并進行精準作業控制是困擾水產界的公認難題[17]。
在水產養殖中,水下捕撈作業屬于水下機器人功能應用之一,它依靠多功能機械手或吸管等實現對水產品的捕撈,可以替代人工在危險環境中作業。為了給水產養殖水下作業機器人軟件開發提供理論依據和綜合性參考,本文對水下機器人捕撈作業中所涉及的關鍵技術的國內外研究現狀進行分析與討論,并對其發展趨勢進行展望。
1 UVMS捕撈作業的關鍵技術
弱光照、多擾動、強耦合、非結構化海洋環境下,水下機器人-機械手系統(UVMS)的精準捕撈作業,需要解決水下目標識別、導航與定位、機器人-機械手系統動力學建模、作業優化控制等幾個方面的關鍵技術問題。UVMS捕撈作業關鍵技術體系及各技術所需應對挑戰的結構框圖如圖1所示。
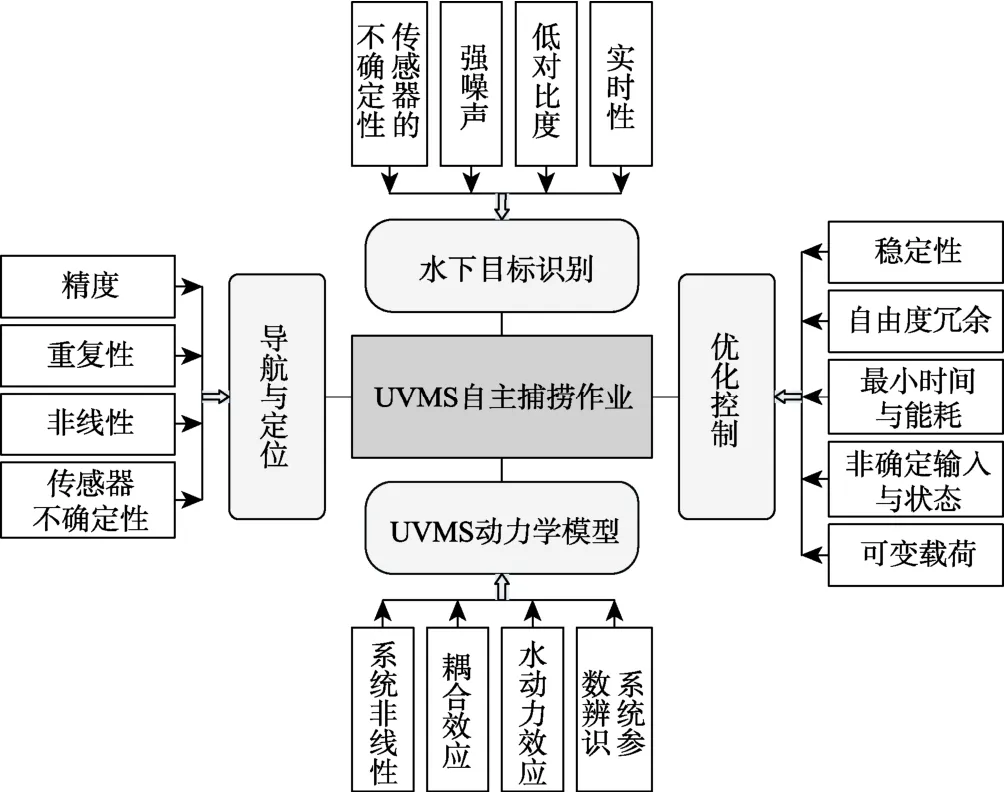
圖1 UVMS捕撈作業關鍵技術體系結構框圖Fig.1 Architecture diagram of key technologies for UVMS fishing operation
1.1 復雜環境和擾動條件下目標動物的快速準確識別
目標識別是指計算機賦予機器人視覺功能[18]。水產養殖水下機器人為實現其功能,它需要時刻感知水下目標的信息,基于這些信息才能做出決策控制。目前常用的水下目標探測與識別技術有聲學傳感器(聲納)成像和光學傳感器(攝像機)成像 2種[19]。聲納成像作用距離遠,但由于受水下環境噪聲和背景目標的影響,生成圖像的清晰度低。水下攝像機采集的圖像清晰度和分辨率都較好,但其成像質量受海水濁度和能見度影響很大,總體成像距離較短。
水下成像環境較為復雜,由于在成像過程中水體對光散射和吸收效應等影響,導致一般成像設備的作用距離只有幾米到十幾米,且其圖像質量不如空氣中的光學圖像,主要具有對比度低、邊緣模糊、色彩丟失、噪聲嚴重等特點[20]。這些因素都極大影響了水下目標的精準識別與定位。因此,研究通用的水下圖像恢復算法和智能識別算法是提高水下視覺系統可靠性的關鍵。
圖像恢復算法是對水下光學成像過程進行定量描述,若水下視覺系統的內外參數為已知,則對污染較嚴重的圖像恢復效果好,能為下一步的圖像識別提供優質數據[21]。國內外學者致力于探索水下光學傳播模型,譬如,Jaffe–McGlamery能較好地模擬后向散射和光衰減[22-23],對于彩色圖像,需要每個通道單獨設置參數并計算,不利于實時圖像處理;在未知點擴散函數的情況下,基于交替迭代和 Hopfield神經網絡的方法能夠獲得較好的圖像恢復效果[24]。點擴散函數具有一定恢復能力,算法簡單,但模型參數靠人工經驗,場景適應性差[25];輻射傳遞方程引入無量綱的光學深度和光學厚度參數,充分考慮散射,對場景的適應性強,但算法復雜,運算時間長[26];調制傳遞函數能準確描述水下成像機制并在實驗室環境下進行了驗證[27],但受小角度近似規則的限制,更廣角度的水下成像需要進一步研究。綜上所述,目前沒有一個通用的水下圖像恢復模型來提升水下圖像質量,總結各圖像恢復模型的優缺點,篩選構建出一個高魯棒性的圖像快速恢復模型具有重要意義和應用價值。
國內外水下圖像目標識別已經涉及到了比較多的領域,如水下目標檢測[28]、海底生物統計[29]、魚類監測[30]等。另外,基于邊界、聚類、閾值、區域和人工神經網絡的分割方法提取目標[31],用主動輪廓法[32]、神經網絡[33]、多特征融合[34]和機器學習[35]等對目標進行識別,能夠基本滿足水下近距離快速準確識別目標的要求,并且具有較強的適應性,但對于水底復雜背景下的不規則目標識別效果不佳[36]。隨著深度學習的快速發展,深度卷積神經網絡對復雜環境下的不規則目標的識別展現出高準確性和高穩定性的優點,并在不規則目標農業病蟲害識別檢測中得到了驗證。Brahimi等[37]和Fuentes等[38]分別建立深度卷積神經網絡對番茄的病蟲害進行快速識別,識別準確率在97%以上。Ramcharan等[39]構建了42層的Inception v3型深度卷積神經網絡并訓練,用于識別木薯的3種疾病和2種害蟲損害,總體識別率達到93%。
充分吸收前人在水下目標識別或復雜環境下目標識別的研究成果,將水下圖像恢復技術和深度學習技術相融合,探索淺海養殖復雜水下環境下目標動物的快速準確識別是值得研究的課題。
1.2 多擾動條件下目標動物位置識別定位與導航
水產養殖中,UVMS的導航與定位,涉及機器人沿預定路徑行進過程中的導航定位問題以及AUV相對作業目標的定位問題。由于水下環境的特殊性,使得水下導航與定位比陸地困難。慣性導航的無源性和自主性,為實現水下機器人的自主導航定位創造了條件,慣性導航系統(inertial navigation system,INS)目前已成為水下機器人的核心導航設備。但是,INS的定位誤差隨時間累積而逐漸增大,無法滿足長期和高精度的導航定位要求,因此,需要通過其他導航手段對慣性導航系統進行定期修正,如多普勒測速儀DVL、水下聲學導航、地球物理導航等。考慮到實時海流的影響,一種DVL輔助捷聯慣性導航系統(strap-down inertial navigation system,SINS)被用于AUV的導航與定位,仿真結果表明,SINS/DVL組合導航比純慣性導航有更高的定位精度[40]。為改進由SINS、DVL和磁羅盤所組成的AUV的導航系統性能,Xu等[41]將進化人工神經網絡與容錯自適應Kalman濾波算法結合起來,基于原型機的試驗結果可見,當觀測數據短期失效時,該方案明顯優于傳統Kalman濾波算法。Zhang等[42]利用SINS與長基線聲學定位系統(long base line,LBL)間的交互輔助作用來研究 AUV定位系統;一方面,SINS解算的定位結果能夠提高LBL定位精度,另一方面,LBL定位信息也能夠定期補償 SINS的累積誤差。一種地形輔助慣性導航被用于估算AUV的位置和方向,水池和現場試驗都驗證了所述組合導航方案的有效性[43]。
精確估算出 AUV相對于作業目標的位置與姿態是UVMS實現精準作業任務的必要條件。關于AUV的相對位姿估算問題,有些研究者做了一些探索,他們將該問題視作目標運動的估算問題,主要開展純方位跟蹤研究[44-45];其中,慣性測量單元(inertial measurement unit,IMU)用于提供UVMS的線性加速度和角速度,單目照相機用于提供目標相對UVMS的方位測量值;在測量過程中,由于某些目標狀態變量的不可觀測性和高度非線性,用上述方法估算AUV相對于作業目標的位置與姿態存在困難。因此,需要提出其他方法來克服上述算法的不足,增強UVMS定位的可重復性。
AUV的相對位置感知問題可以通過即時定位與地圖構建(simultaneous localization and mapping,SLAM)技術加以實現[46]。SLAM 問題可以描述為機器人在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現機器人的自主定位和導航[47-48]。在SLAM 中,一旦地圖構建成功,即使目標從視場消失,UVMS也能基于該地圖進行操作[46]。袁贛南等[49]針對海底石油管道漏油位置檢測定位問題,提出了捷聯慣性導航系統與SLAM算法相組合的水下導航定位方法。周紹磊等[50]將慣性導航和單目視覺 SLAM 2種無源定位方法相互融合,構建具有較高定位精度和魯棒性的無源定位系統。自提出 SLAM 算法思想以來,基于擴展卡爾曼濾波(extended Kalman filter,EKF)的SLAM算法成為標準估計算法[51]。然而在系統模型和噪聲統計特性不精確的情況下,EKF的濾波精度可能嚴重下降甚至引起濾波發散,為此提出了很多改進的EKF算法解決SLAM問題[52-53]。
對于定位精度要求較高的 AUV-機械手作業場合,EKF不能單獨用于AUV的相對位置估計[54]。粒子濾波算法基本思想是從概率密度分布中隨機抽取一組加權樣本來近似后驗概率密度,可用于對任何非線性模型估計,可很好解決AUV-機械手和作業目標定位問題[49]。傳統粒子濾波算法存在粒子退化以及粒子貧乏引起水下機器人定位和導航精度下降問題,研究者可以從重要性函數選取或針對重采樣過程提出不同的改進算法。
粒子濾波適用于海底的非線性、非高斯模型。基于粒子濾波的 SLAM 算法能夠獲得水下機器人的位姿估算,且估算誤差不隨時間增長,通過改進卡爾曼濾波將其與SINS相融合,可以顯著改善水下機器人的導航性能。因此,將粒子濾波與改進卡爾曼濾波結合起來用于作業目標的位姿估算,是一條行之有效的技術途徑,針對淺海養殖撿拾作業目標(死魚、海參等)定位,則需要從實際應用場景參數和干擾上對其做具體深入研究。
1.3 時變多體撿拾作業條件下水下機器人-機械手系統(UVMS)動力學模型
AUV通常采用欠驅動工作方式以便節省能源,而機械臂水下作業時會對AUV本體產生擾動,使得欠驅動的AUV可能無法保證自主穩定,這樣AUV和機械臂的協調運動就成為關鍵問題[55]。針對水下機器人-機械手系統(UVMS)的協調控制,首先需要建立其運動學及動力學模型。UVMS動力學模型是隨時間變化精準預測系統運動狀態的數學描述,可為系統作業的精準控制提供理論依據,也是水下機器人作業控制研究的核心內容[56]。由于水下洋流的非線性運動,未知環境干擾、系統負載變化以及系統本體運動的相互作用等,使得水下機器人-機械手的運動具有耦合、時變、非線性、冗余等特點[57-58],大大增加系統建模的難度[17]。
為了探索UVMS的運動規律,Mahesh等[59]開發了基于拉格朗日的UVMS動力學模型,成為模擬水下機器人剛體運動的重要手段。Kim 等[60]使用標準拉格朗日動力學方程在實驗室環境下成功實現了水下機器人對外界環境的干預。Xu等[61]提出一種準拉格朗日公式來仿真UVMS模型,考慮主要的流體動力學效應和恢復力,將復合系統轉化為一系列子系統,簡化動力學分析,但沒有考慮多系統間的相互作用。Huang等[16]和Korkmaz等[54]基于牛頓-歐拉遞推算法建立了水下機器人系統的動力學模型,包括推力器的力學運動方程、自主水下機器人-機械手系統的流體動力學模型,當計算水動力時,考慮了物體彼此的遮蔽效應。與拉格朗日法相比,牛頓-歐拉動力學方程可以利用更簡單和耗時少的模型明確地描述系統角動量行為。但牛頓-歐拉公式用于三維以及具有多自由度的二維系統推導動力學方程時非常困難,而凱恩方程沒有這樣的限制。Tarn等[62]基于凱恩方法開發了UVMS的一種動力學模型,該模型采用閉合形式,有利于提高UVMS的操控性和可靠性。Hussain等[63]基于凱恩方程對 3自由度連桿機構運動鏈構建了動力學模型,展現出其在復雜多系統應用中的有效性。凱恩方程的動力學模型為外部環境力提供了一種直接表示方法,并且計算效率高,同時明晰了哪些力影響系統動態行為。
另外,Periasamy等[64]將鍵合圖技術應用于水下機器人及其機械手系統的耦合動力學的模擬分析,通過鍵合圖提供了系統動態建模的自由度,清楚地指示了系統中各個元件之間的物理相互作用,更便于開發適當的補償機制控制動態耦合。Kumar等[65]基于歐拉-伯努利梁理論,采用鍵合圖技術進行混合阻抗的UVMS動力學建模,直觀展現了機器人本體與機械手的靈活鏈路。相比于其他動力學模型,鍵合圖模型使得外部力建模和系統模型擴展為更高的自由度更為簡單,所有交互點處的力和速度信息都可以在共流結和共勢結處獲得,因此,通過這種建模技術,可以方便地實現水下機器人在交互點處的軌跡控制和力控制。目前常用的UVMS建模方法的主要優缺點如表1所示。

表1 UVMS建模方法的優缺點Table 1 Advantages and disadvantages of UVMS modeling methods
目前的主流動力學模型在相對可控的環境下展現出各自優勢,對處于不確定擾動和復雜環境干擾的 UVMS動力學建模,需要結合以上動力學模型的優點,構建高魯棒性的復合UVMS動力學模型以適應淺海養殖撿拾實際作業需求。
1.4 多約束條件下淺海養殖精準撿拾作業的優化控制
UVMS優化控制是在滿足一定能量約束的條件下,考慮到系統的內外擾動,采用一定的控制算法使機器人-機械手系統按照作業指令高效準確地完成運動和作業任務,并使系統的一個或幾個物理量能夠達到最優的控制精度[66]。由于水下作業的多擾動、大慣性、強耦合等約束問題突出,加之UVMS的運動和作業機構的硬件單元復雜龐大,使得精準的UVMS運動和作業控制需求極為迫切[67]。
在不確定干擾情況下,以流體動力學理論為基礎,如何設計使UVMS系統穩定的魯棒控制器,中外學者先后進行了探索研究,提出了滑模控制、模糊控制、自適應控制等控制算法,以期解決這一非線性控制難題。Antonelli等[68]提出了一種用于UVMS調節的滑模控制方法,滑模控制是一種非線性控制方法,可避免系統雅可比行列式的反演,從而克服了運動奇點的出現。然而,由于實際養殖水體中水動力很難準確估計,盡管在魯棒滑模控制器的控制下[66],通過選擇高增益以實現系統的穩定,但會導致高頻抖動效應,這種抖動會使機器人-機械手系統出現未建模動力,導致模型不匹配而失敗。在實際非線性動力學系統中,由測量噪聲、外部擾動和模型簡化等因素造成的未建模動力經常出現,它的存在會降低系統性能,甚至導致系統不穩定。Esfahani等[69]提出了一種時延控制(time delay control,TDC)方法,包括采用時延估計項,終端滑動模式(terminal sliding mode,TSM)項和PID項來實現UVMS的軌跡跟蹤,但過多耦合參數使得優化控制不太方便,因為耦合系統優化計算存在尋優與解耦兩重嵌套循環,使得耦合系統優化設計計算量大、計算精度低。另一方面,由于水下機器人本體和機械手存在互相掣肘問題,Antonelli等[70]結合了任務優先逆運動學方法和模糊方法來執行UVMS的運動協調控制,并且采用模糊方法來分配機器人和操縱器之間的運動。Xu等[71]提出了神經模糊控制器來實現 UVMS的跟蹤控制。雖然模糊控制器是一種不依賴于模型的智能控制方法,但是模糊控制的規則表調整比較復雜,因此在實際應用中具有一定的難度。Han等[72]針對 UVMS系統提出了一種自適應控制算法,將最優 PID控制、魯棒自適應控制與恢復向量補償結合起來用于UVMS的運動控制。Mohan等[56]開發了一種基于EKF的間接自適應控制方法,用于UVMS執行水下操作任務。但是,自適應控制算法需要很高的計算量,并且涉及大量的參數調整。由于水下機器人具有較強機動性,通過減少水下機器人-機械手系統的動態參數數量以保證算法的實時性是不可取的,所以自適應控制算法在UVMS系統中的應用受到了一定的限制[70]。
隨著預測控制技術的發展,非線性模型預測控制(nonlinear model predictive control,NMPC)在具有大延遲和強擾動的非線性系統中表現出很強的魯棒性,并已成功應用于運動控制領域的優化控制[73]。德國伊爾默瑙工業大學仿真與優化團隊開發的NMPC控制策略框架已經讓無人車在跟蹤、轉彎、避障、急停等場景下快速做出響應并準確完成控制任務。目前已有相關研究將模型預測控制(model predictive control,MPC)的滾動優化控制思想應用于機器人-機械手系統中,也獲得了很好的控制效果[74-75]。Jasour和Farrokhi[76]提出冗余機器人手臂的非線性模型預測控制,用于軌跡跟蹤和避障問題。通過在NMPC中使用模糊邏輯在線調整加權因子,使得路徑跟蹤和避障權重獲得更好的性能。Rybus等[67]使用NMPC來實現對衛星上無人操縱器的軌跡跟蹤控制,仿真結果表明,與動態雅可比逆的控制器相比,NMPC能更大限度地減少末端執行器的位置誤差。因此,采用基于非線性模型預測控制策略,可以較好地預測偏差和整定參數,模型適配能力較好,并具備獨特的實時滾動優化處理能力,能夠不斷地將系統給定和偏差融合到下一環節控制算法中,這樣能夠比較好地消除本體和機械手間的掣肘影響以及應對水文變化等突發干擾,并能夠對水下多目標體運動和作業任務實現準確控制。應用于UVMS的常用控制算法的主要優缺點如表2所示。

表2 UVMS控制算法的優缺點Table 2 Advantages and disadvantages of UVMS control algorithms
如何在強耦合、多干擾、時變、多體、多環節的條件下,將淺海養殖水下機器人-機械手精準撿拾作業看成一個整體系統進行非線性模型預測控制,是值得探討的科學問題。
2 研究展望
1)采用多傳感器信息融合技術,研究復雜環境和擾動條件下目標動物的快速準確識別算法,是水下目標識別研究需要進一步探索的課題。由于水下環境自身的特殊性,使得水產養殖水下機器人在水下目標感知與識別方面的研究受到很大的限制。在配備水下照明燈情況下,水下攝像機適合清水并且近距離的目標圖像采集。聲納探測距離較遠,避障能力強,聲探測技術實現比較容易,但基于聲納圖像的目標識別可靠性和準確率有待提高。近年來,利用平面換能器陣通過波束形成對水下目標進行三維成像技術發展迅速,用于水下目標識別的三維成像聲納是一個全數字化系統,能夠獲得水下目標的形狀與方位信息,三維成像聲納為水下目標識別研究提供了有利的工具。激光成像能夠有效克服養殖水體后向散射對成像的影響,提高了圖像對比度,其成像質量遠高于聲納成像質量,并且能夠提供目標物坐標、距離等信息,是較為理想的水下目標探測與識別手段。隨著激光成像裝置尺寸、質量和功耗的逐步降低,高性價比的激光成像儀將會被用于水產養殖水下機器人。水下目標圖像采集裝置在技術方面的不斷進步,為獲取高質量圖像信息提供有力保障,從而在一定程度上降低了圖像處理的復雜程度。另一方面,水下目標圖像處理算法的研究一直是水下機器人技術的研究熱點之一。如何深入分析非均勻光照、水下光源、濁度、機器人本體晃動等對目標動物水下成像的影響,揭示水下目標成像的衰減和散射規律,構建目標動物圖像恢復和去噪模型,是水下目標識別研究的關鍵。多傳感器信息融合是指對不同知識源和傳感器采集的數據進行融合,以實現對觀測對象更好的理解。常用的多傳感器信息融合方法有卡爾曼濾波、貝葉斯理論、D-S證據理論、聚類分析和神經網絡等。海洋背景下,多傳感器信息融合技術的典型應用是通過聲納圖像和光學圖像的融合來實現對水下目標的識別。研究基于多傳感器信息融合和深度學習的復雜環境和擾動條件下目標動物的快速準確識別算法,是水下目標識別研究需要進一步探索的課題。
2)發展高可靠性、高集成度并具有綜合補償和校正功能的組合導航系統代表了水產養殖水下機器人導航技術的發展方向。高精度的導航定位能力是衡量水產養殖水下機器人技術水平的一個重要標志。一方面要加大導航傳感器的研制力度,提高其測量精度和可靠性。另一方面,各種水下導航技術都有其優缺點,將不同導航技術適當地組合起來,不僅可以做到優勢互補,提高導航精度,還在一定程度上降低對單一導航系統的精度要求。對于水產養殖捕撈作業來說,UVMS相對目標動物的定位精度需要達到dm級水平。由于水下目標背景復雜、視覺主體晃動、傳感器信息存在不確定性,考慮將捷聯慣性導航與SLAM算法相結合,利用圖像傳感器(相機/聲納)采集水下機器人運動路徑上的特征位置信息,與慣性傳感器解算的位置信息相融合,獲得高精度的定位信息,是一條行之有效的技術途徑。綜合利用多種導航傳感器測量信息,運用現代濾波理論進行多源信息融合,發展高可靠性、高集成度并具有綜合補償和校正功能的組合導航系統代表了水產養殖機器人導航技術的發展方向。
3)如何在保證水產養殖水下機器人運動控制穩定性的前提下,提升控制系統的自適應性和容錯能力,提高智能系統在實際應用中的可行性是今后研究工作的重點。目前UVMS常用的動力學建模方法有Newton-Euler法、Quasi-Lagrange法、Kane法和Davies法等,這些動力學模型在相對可控的環境下展現出各自優勢。對處于不確定擾動和復雜環境干擾下的UVMS動力學建模,需要結合上述動力學模型的優點,采用非線性的補償機制,構建高魯棒性的復合UVMS動力學模型以適應淺海養殖捕撈作業需求。UVMS是非線性、強耦合、參數不確定的多輸入多輸出系統,另外,水下機器人本體、機械手以及水下作業環境的模型又難以準確獲得。為了實現對目標動物的快速捕獲,UVMS控制的實時性也是需要考慮的重要因素。因此,UVMS的有效控制是一項挑戰性的課題。針對UVMS的控制方法主要有PID控制、滑模控制、模糊控制、自適應控制和魯棒控制等,由于每種控制算法各有優缺點,可以考慮將不同控制方式相互結合使用,以提高水下機器人控制器的控制精度和收斂速度。比如,采用自適應滑模控制器、模糊自適應 PID控制器等實現對機器人-機械手系統的協調運動控制和高精度軌跡跟蹤控制。自主能力體現機器的智能水平,UVMS的自主能力通過人工智能技術實現,基于符號推理和人工神經網絡是人工智能研究的 2種主要方法。具有符號推理能力是智能控制系統最基本的需求,但目前基于符號的推理仍存在知識獲取困難、學習能力較低和實時性較差等局限性,而人工神經網絡采用并行、分布式的存儲和處理機制,具有較強的學習、聯想和自適應能力,2種方法的融合能夠有效提高UVMS的智能水平。
3 結 論
1)傳統水產養殖水下監測和作業任務主要依靠人工完成,勞動強度大,危險性高,近幾年愿意從事該行業的人越來越少,水產養殖業面臨嚴重的人工危機。水下機器人是人類探索海洋的重要工具,隨著技術進步和制造成本的降低,將水下機器人應用于水產養殖業日益受到人們的重視。
2)由于海洋環境的復雜性,水下捕撈作業是一項頗具挑戰性的任務。水下機器人-機械手系統(UVMS)是一種新型的作業型水下機器人,通過軟硬件的優化設計,它可以替代人工實現對水產品的捕撈。弱光照、多擾動、強耦合、非結構化海洋環境下,UVMS的精準捕撈作業涉及水下目標識別、導航與定位、UVMS動力學模型、作業優化控制等幾個方面的關鍵技術問題。在文獻檢索的基礎上,文中對UVMS捕撈作業所需解決的關鍵技術的地位和國內外研究現狀展開綜述。
3)采用多傳感器信息融合技術,研究復雜環境和擾動條件下目標動物的快速準確識別算法,提高水產養殖水下作業機器人目標識別速度和準確性是今后研究的必然方向;發展高可靠性、高集成度并具有綜合補償和校正功能的組合導航系統代表了水產養殖水下機器人導航技術的發展方向;在保證水產養殖水下機器人運動控制穩定性的前提下,提升控制系統的自適應性和容錯能力,不斷提高智能系統在實際應用中的可行性是今后研究工作的重點。
[1]范建平. 影響我國海洋經濟可持續發展的重大問題分析[J]. 中國管理信息化,2017,20(12):115-116.Fan Jianping. Analysis of major issues affecting sustainable development of China's marine economy [J]. China Management Informationization, 2017, 20(12): 115-116. (in Chinese with English abstract)
[2]張耀光,劉鍇,王圣云,等. 中國與世界多國海洋經濟與產業綜合實力對比分析[J]. 經濟地理,2017,37(12):103-111.Zhang Yaoguang, Liu Kai, Wang Shengyun, et al.Comparative analysis of marine economic and industrial comprehensive strength between China and other countries in the world [J]. Economic Geography, 2017, 37(12): 103-111.(in Chinese with English abstract)
[3]林可,王飛,馬家志,等. 離岸型智能化淺海養殖圍網應用及效益分析[J]. 水產科技情報,2017,44(5):268-272.Lin Ke, Wang Fei, Ma Jiazhi, et al. Net pen application and benefit analysis of offshore intelligent shallow sea breeding[J]. Fisheries Science & Technology Information, 2017, 44(5):268-272. (in Chinese with English abstract)
[4]楊衛中,徐銀麗,喬曦,等. 基于對比度受限直方圖均衡化的水下海參圖像增強方法[J]. 農業工程學報,2016,32(6):197-203.Yang Weizhong, Xu Yinli, Qiao Xi, et al. Method for image intensification of underwater sea cucumber based on contrastlimited adaptive histogram equalization [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 197-203. (in Chinese with English abstract)
[5]劉文武,劉刊,徐偉剛,等. 我國潛水行業的現狀與潛水員的健康安全管理建議[J]. 海軍醫學雜志,2016,37(3):284-286.Liu Wenwu, Liu Kan, Xu Weigang, et al. Status of diving industry and divers' health and safety management suggestions in China [J]. Journal of Navy Medicine, 2016, 37(3): 284-286.(in Chinese with English abstract)
[6]胡金有,王靖杰,張小栓,等. 水產養殖信息化關鍵技術研究現狀與趨勢[J]. 農業機械學報,2015,46(7):251-263.Hu Jinyou, Wang Jingjie, Zhang Xiaoshuan, et al. Research status and development trends of information technologies in aquacultures [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 251-263. (in Chinese with English abstract)
[7]常宗瑜,姚冰川,王磊,等. 水產養殖用水下移動機械手的耦合動力學分析[J]. 機械設計,2012,29(2):47-50.Chang Zongyu, Yao Bingchuan, Wang Lei, et al. Analysis of coupling dynamics of underwater mobile manipulator for aquaculture [J]. Journal of Machine Design, 2012, 29(2):47-50. (in Chinese with English abstract)
[8]黃海. 遙控潛水器的控制體系結構及作業技術[M]. 北京:國防工業出版社,2011.
[9]徐玉如,李彭超. 水下機器人發展趨勢[J]. 自然雜志,2011,33(3):125-132.Xu Yuru, Li Pengchao. Developing tendency of unmanned underwater vehicles [J]. Chinese Journal of Nature, 2011,33(3): 125-132. (in Chinese with English abstract)
[10]叢明,劉毅,李泳耀,等. 水下捕撈機器人的研究現狀與發展[J]. 船舶工程,2016,38(6):55-60.Cong Ming, Liu Yi, Li Yongyao, et al. Research and development of underwater fishing robot [J]. Ship Engineering,2016, 38(6): 55-60. (in Chinese with English abstract)
[11]王潤田,陳晶晶,龔劍彬. 深水網箱養殖中的聲學監測問題探討[J]. 漁業現代化,2012,39(3):19-22.Wang Runtian, Chen Jingjing, Gong Jianbin. Acoustic monitoring for ocean aquaculture in sea cage [J]. Fishery Modernization, 2012, 39(3): 19-22. (in Chinese with English abstract)
[12]張凈,沈捷,劉曉梅. 基于太陽能供電的行走式智能增氧機器人研究[J]. 農業機械學報,2017,48(12):340-345.Zhang Jing, Shen Jie, Liu Xiaomei. Realization of walking intelligence oxygenated robot Based on Solar Power [J].Transactions of the Chinese Society for Agricultural Machinery,2017, 48(12): 340-345. (in Chinese with English abstract)
[13]Rundtop P, Frank K. Experimental evaluation of hydroacoustic instruments for ROV navigation along aquaculture net pens[J]. Aquacultural Engineering, 2016(74): 143-156.
[14]Duda A, Schwendner J, Stahl A, et al. Visual pose estimation for autonomous inspection of fish pens[C]// Proceedings of MTS/IEEE Oceans. Genova, Italy, 2015.
[15]Wang Y, Wang S, Wei Q, et al. Development of an underwater manipulator and its free-floating autonomous operation [J]. IEEE-ASME Transactions on Mechatronics,2016, 21(2): 815-824.
[16]Huang H, Tang Q, Li H, et al. Vehicle-manipulator system dynamic modeling and control for underwater autonomous manipulation [J]. Multibody System Dynamics, 2016, 41:125-147.
[17]Sugiyama N, Toda M. A nonlinear disturbance observer using delayed estimates -its application to motion control of an underwater vehicle-manipulator system[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.Daejeon, South Korea, 2016: 2007-2013.
[18]Qiao X, Rauschenbach T, Li D L. Review of underwater machine vision technology and its applications [J]. Marine Technology Society Journal, 2017, 51(1): 75-97.
[19]龐碩,糾海峰. 智能水下機器人研究進展[J]. 科技導報,2015,33(23):66-71.Pang Shuo, Jiu Haifeng. Current status of autonomous underwater vehicles research and development [J]. Science &Technology Review, 2015, 33(23): 66-71. (in Chinese with English abstract)
[20]Elibol A, Garcia R, Gracias N. A new global alignment approach for underwater optical mapping [J]. Ocean Engineering,2011, 38(10): 1207-1219.
[21]Schettini R, Corchs S. Underwater image processing: State of the art of restoration and image enhancement methods [J].Eurasip Journal on Advances in Signal Processing, 2010(1):1-15.
[22]Lee D, Kim G, Kim D, et al. Vision-based object detection and tracking for autonomous navigation of underwater robots[J]. Ocean Engineering, 2012, 48(7): 59-68.
[23]Wu X, Li H. A simple and comprehensive model for underwater image restoration[C]// IEEE International Conference on Information and Automation (ICIA). Yinchuan,China, 2013: 699-704.
[24]屈志毅,沃炎,任志宏. 基于交替迭代和神經網絡的盲目圖像恢復[J]. 計算機學報,2000,23(4):410-413.Qu Zhiyi, Wo Yan, Ren Zhihong. Blind image restoration based on alternating iteration and neural network [J]. Chinese Journal of Computers, 2000, 23(4): 410-413. (in Chinese with English abstract)
[25]Han J F, Yang K C, Xia M, et al. Resolution enhancement in active underwater polarization imaging with modulation transfer function analysis [J]. Applied Optics, 2015, 54(11):3294-3302.
[26]Stephan T, Beyerer J. Computer graphical model for underwater image simulation and restoration[C]// ICPR Workshop on Computer Vision for Analysis of Underwater Imagery. Stockholm, Sweden, 2014: 73-79.
[27]Huang Y, Cao F, Jin W, et al. Underwater pulsed laser range-gated imaging model and its effect on image degradation and restoration [J]. Optical Engineering, 2014,53(6): 603-608.
[28]Chen Z, Zhang Z, Dai F, et al. Monocular vision-based underwater object detection [J]. Sensors, 2017, 17(8): 1-14.
[29]Sautya S, Ingole B, Jones D O B, et al. First quantitative exploration of benthic megafaunal assemblages on the mid-oceanic ridge system of the Carlsberg Ridge, Indian Ocean [J]. Journal of the Marine Biological Association of the United Kingdom, 2017, 97(2): 409-417.
[30]Boldt J L, Williams K, Rooper C N, et al. Development of stereo camera methodologies to improve pelagic fish biomass estimates and inform ecosystem management in marine waters [J]. Fisheries Research, 2018, 198: 66-77.
[31]Agrawal S, Xaxa D K. Survey on image segmentation techniques and color models [J]. International Journal of Computer Science & Information Technologies, 2014, 5(3):3025-3030.
[32]Liu T, Wan L, Liang X W. An image segmentation method of underwater targets based on active contour model [J].Applied Mechanics and Materials, 2014, 511-512: 457-461.
[33]陳榮盛,袁小海,胡震,等. 水下機器人作業目標控制和目標識別[J]. 船舶力學,1998,2(1):62-68.Chen Rongsheng, Yuan Xiaohai, Hu Zhen, et al. Autonomous underwater vehicle job controlling and object recognition [J].Journal of Ship Mechanics, 1998, 2(1): 62-68. (in Chinese with English abstract)
[34]Rizzini D L, Kallasi F, Oleari F, et al. Investigation of vision-based underwater object detection with multiple datasets [J]. International Journal of Advanced Robotic Systems, 2015, 12: 1-13.
[35]Wang H Y, Dong F, Song L M. Bubble-forming regime identification based on image textural features and the MCWA feature selection method [J]. IEEE Access, 2017,5(99): 15820-15830.
[36]Qiao X, Bao J H, Zeng L H, et al. An automatic active contour method for sea cucumber segmentation in natural underwater environments [J]. Computers and Electronics in Agriculture, 2017, 135 (C): 134-142.
[37]Brahimi M, Boukhalfa K, Moussaoui A. Deep learning for tomato diseases: classification and symptoms visualization[J]. Applied Artificial Intelligence, 2017, 31(4): 299-315.
[38]Fuentes A, Yoon S, Kim S C, et al. A robust deeplearning-based detector for real-time tomato plant diseases and pests recognition [J]. Sensors, 2017, 17(9): 2022-2034.
[39]Ramcharan A, Baranowski K, McCloskey P, et al. Deep learning for image-based cassava disease detection [J].Frontiers in plant science, 2017, 8: 1852-1863.
[40]Liu Q, Xu X, Han B. An integrated navigation method based on SINS/DVL-WT for AUV [J]. Applied Mechanics and Materials, 2013, 303-306(2): 904-907.
[41]Xu X, Li P, Liu J. A fault-tolerant filtering algorithm for SINS/DVL/MCP integrated navigation system [J]. Mathematical Problems in Engineering, 2015(4): 1-12.
[42]Zhang T, Chen L, Li Y. AUV underwater positioning algorithm based on interactive assistance of SINS and LBL[J]. Sensors, 2016, 16(1): 1-22.
[43]Newman P, Durrant-Whyte H. Using sonar in terrain-aided underwater navigation[C]// IEEE International Conference on Robotics & Automation. Leuven, Belgium, 1998: 440-445.
[44]Conti R, Fanelli F, Meli E, et al. A free floating manipulation strategy for autonomous underwater vehicles [J]. Robotics and Autonomous Systems, 2017, 87: 133-146.
[45]Huster A, Rock S M. Relative position estimation for manipulation tasks by fusing vision and inertial measurements[C]// MTS/IEEE Oceans 2002 Conference. Biloxi, USA,2001: 1025-1031.
[46]Ribas D, Ridao P, Tardos J D, et al. Underwater SLAM in man-made structured environments [J]. Journal of Field Robotics, 2008, 25(11/12): 898-921.
[47]Fallon M F, Folkesson J, Mcclelland H, et al. Relocating underwater features autonomously using sonar-based SLAM[J]. IEEE Journal of Oceanic Engineering, 2013, 38(3):500-513.
[48]Mallios A, Ridao P, Ribas D, et al. Scan matching SLAM in underwater environments[J]. Autonomous Robots, 2014,36(3): 181-198.
[49]袁贛南,王丹丹,魏延輝,等. 水下石油管道漏油檢測定位的粒子濾波SLAM算法[J]. 中國慣性技術學報,2013,21(2):204-208.Yuan Gannan, Wang Dandan, Wei Yanhui, et al. Particle filter SLAM algorithm for underwater oil pipeline leakage detection and positioning [J]. Journal of Chinese Inertial Technology, 2013, 21(2): 204-208. (in Chinese with English abstract)
[50]周紹磊,吳修振,劉剛,等. 一種單目視覺ORB-SLAM/INS組合導航方法[J]. 中國慣性技術學報,2016,24(5):633-637.Zhou Shaolei, Wu Xiuzhen, Liu Gang, et al. Integrated navigation method of monocular ORB-SLAM/INS [J]. Journal of Chinese Inertial Technology, 2016, 24(5): 633-637. (in Chinese with English abstract)
[51]王宏健,王晶,邊信黔,等. 基于組合EKF的自主水下航行器SLAM[J]. 機器人,2012,34(1):56-64.Wang Hongjian, Wang Jing, Bian Xinqian, et al. SLAM of AUV based on the combined EKF [J]. Robot, 2012, 34(1):56-64. (in Chinese with English abstract)
[52]Tully S, Moon H, Kantor G, et al. Iterated filters for bearingonly SLAM[C]// IEEE International Conference on Robotics and Automation. Pasadena, USA, 2008: 1442-1448.
[53]Kang J G, Choi W S, An S Y, et al. Augmented EKF based SLAM method for improving the accuracy of the feature map[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China, 2010: 3725-3731.
[54]Korkmaz O, Ider S K, Ozgoren M K. Trajectory tracking control of an underactuated underwater vehicle redundant manipulator system [J]. Asian Journal of Control, 2016, 18(5):1593-1607.
[55]陳巍,魏延輝,曾建輝,等. 水下機器人-機械手系統控制方法綜述[J]. 重慶理工大學學報(自然科學版),2015,29(8):116-123.Chen Wei, Wei Yanhui, Zeng Jianhui, et al. Review of underwater vehicle-manipulator system control method [J].Journal of Chongqing University of Technology (Natural Science), 2015, 29(8): 116-123. (in Chinese with English abstract)
[56]Mohan S, Kim J. Indirect adaptive control of an autonomous underwater vehicle-manipulator system for underwater manipulation tasks [J]. Ocean Engineering, 2012, 54: 233-243.
[57]Barbalata C, Dunnigan M W, Petillot Y. Dynamic coupling and control issues for a lightweight underwater vehicle manipulator system[C]// Oceans Conference. St Johns, Canada,2014: 1-6.
[58]Ismail Z H, Dunnigan M W. Tracking control scheme for an underwater vehicle-manipulator system with single and multiple sub-regions and sub-task objectives [J]. IET Control Theory and Applications, 2011, 5(5): 721-735.
[59]Mahesh H, Yuh J, Lakshmi R. A coordinated control of an underwater vehicle and robot manipulator [J]. Journal of Robotic System, 1991, 8(3): 339–370.
[60]Kim T W, Yuh J. Development of a real-time control architecture for a semi-autonomous underwater vehicle for intervention missions [J]. Control Engineering Practice, 2004,12(12): 1521-1530.
[61]Xu G, Guo Y, Xiang X, et al. Motion control and computer simulation for underwater vehicle-manipulator systems[C]//IEEE International Conference on Mechatronics and Automation. Harbin, China, 2007: 1368-1373.
[62]Tarn T J, Shoults G A, Yang S P. A dynamic model of an underwater vehicle with a robotic manipulator using Kane's method [J]. Autonomous Robots, 1996, 3(2/3): 269-283.
[63]Hussain Z, Azlan N Z. KANE's method for dynamic modeling[C]//IEEE International Conference on Automatic Control and Intelligent Systems. Shah Alam, Malaysia, 2016:174-179.
[64]Periasamy T, Asokan T, Singaperumal M. Investigations on the dynamic coupling in AUV-manipulator system and the manipulator trajectory errors using bond graph method [J].International Journal of Systems Science, 2012, 43(6):1104-1122.
[65]Kumar S, Rastogi V, Gupta P. A hybrid impedance control scheme for underwater welding robots with a passive foundation in the controller domain [J]. Simul-Trans Soc Model Simul Int., 2017, 93(7): 619-630.
[66]Thangavel P, Thondiyath A, Makaram S. Optimized Robust Controller for AUV-Manipulator System[C]// IEEE Region 10 Conference on TENCON 2010. Fukuoka, Japan, 2010:945-950.
[67]Rybus T, Seweryn K, Sasiadek J Z. Control system for free-floating space manipulator based on nonlinear model predictive control (NMPC) [J]. Journal of Intelligent &Robotic Systems, 2017, 85(3/4): 491-509.
[68]Antonelli G, Chiaverini S. Task-priority redundancy resolution for underwater vehicle-manipulator systems[C]//IEEE International Conference on Robotics and Automation.Leuven, Belgium, 1998: 768-773.
[69]Esfahani H N, Azimirad V, Danesh M. A time delay controller included terminal sliding mode and fuzzy gain tuning for underwater vehicle-manipulator systems [J]. Ocean Engineering, 2015, 107: 97-107.
[70]Antonelli G, Chiaverini S. Fuzzy redundancy resolution and motion coordination for underwater vehicle-manipulator systems [J]. IEEE Transactions on Fuzzy Systems, 2003,11(1): 109-120.
[71]Xu B, Pandian S R, Sakagami N, et al. Neuro-fuzzy control of underwater vehicle-manipulator systems [J]. Journal of the Franklin Institute, 2012, 349(3): 1125-1138.
[72]Han J H, Chung W K. Active use of restoring moments for motion control of an underwater vehicle-manipulator system[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1):100-109.
[73]Lopez-Sanz J, Ocampo-Martinez C, Alvarez-Florez J, et al.Thermal management in plug-in hybrid electric vehicles: A real-time nonlinear model predictive control implementation[J]. IEEE Transactions on Vehicular Technology, 2017, 66(9):7751-7760.
[74]Tamimi J, Li P. A combined approach to nonlinear model predictive control of fast systems [J]. Journal of Process Control, 2010, 20(9): 1092-1102.
[75]Lazutkin E, Geletu A, Hopfgarten S, et al. An analytical hessian and parallel-computing approach for efficient dynamic optimization based on control-variable correlation analysis [J]. Industrial & Engineering Chemistry Research,2015, 54(48): 12086-12095.
[76]Jasour A M, Farrokhi M. Path tracking and obstacle avoidance for redundant robotic arms using fuzzy NMPC[C]// 2009 American Control Conference. St Louis, MO,2009: 1353-1358.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08