基于主動視覺的手眼系統(tǒng)自標(biāo)定方法
2018-08-16 14:16:36邱曉榮劉全勝
中國測試 2018年7期
邱曉榮, 劉全勝, 趙 吉
(1. 馬來西亞管理科學(xué)大學(xué)信息科學(xué)與工程學(xué)院,雪蘭莪 莎阿南 40100;2. 無錫職業(yè)技術(shù)學(xué)院物聯(lián)網(wǎng)技術(shù)學(xué)院,江蘇 無錫 214121; 3. 江南大學(xué)物聯(lián)網(wǎng)工程學(xué)院,江蘇 無錫 214122)
0 引 言
視覺測量與控制作為機(jī)器人智能化最重要的實(shí)現(xiàn)方式之一,可以大幅提高機(jī)器人的效率和精度,目前在工業(yè)生產(chǎn)中有著非常廣泛的應(yīng)用。機(jī)器人在生產(chǎn)操作時,需要知道目標(biāo)物體相對于機(jī)械手末端執(zhí)行器的位置,這可以通過手眼系統(tǒng)的自標(biāo)定來獲取,獲取的關(guān)鍵在于確定機(jī)械手末端坐標(biāo)系與攝像機(jī)坐標(biāo)系之間的相對位置關(guān)系[1-3]。常見的手眼系統(tǒng)一般可以分為固定視點(diǎn)系統(tǒng)和非固定視點(diǎn)系統(tǒng)2種。非固定視點(diǎn)系統(tǒng)中,攝像機(jī)被固定在機(jī)器人機(jī)械手末端,隨末端執(zhí)行器一起移動,可實(shí)時觀測到攝像機(jī)視野中的工件圖像。
為了實(shí)現(xiàn)非固定視點(diǎn)系統(tǒng)的自標(biāo)定,目前常用的方法是在不使用標(biāo)定參照物的基礎(chǔ)上,精確控制攝像機(jī)做線性無關(guān)的平移運(yùn)動和旋轉(zhuǎn)運(yùn)動,只需依據(jù)場景中若干特征點(diǎn),即可線性求解手眼系統(tǒng)中的攝像機(jī)內(nèi)參矩陣、手眼關(guān)系、特征點(diǎn)目標(biāo)深度等信息。楊廣林等[4]提出依據(jù)2個特征點(diǎn),利用2次平移運(yùn)動和1次旋轉(zhuǎn)運(yùn)動,可線性求解手眼關(guān)系的平移向量和特征點(diǎn)目標(biāo)深度。許海霞等[5]提出只需1個特征點(diǎn),利用5次以上平移運(yùn)動和2次以上旋轉(zhuǎn)運(yùn)動,可實(shí)現(xiàn)自標(biāo)定。孔令富等[6]提出利用4次純平移運(yùn)動可以計算手眼關(guān)系的旋轉(zhuǎn)矩陣,繼而實(shí)現(xiàn)特征點(diǎn)目標(biāo)深度實(shí)時估計。曲學(xué)軍等[7]提出基于平行直線束圖像序列,利用消隱點(diǎn)標(biāo)定攝像機(jī)的焦距和外參數(shù)。陳天飛等[8]通過多次平移運(yùn)動,同時結(jié)合四參數(shù)平面模型,分別標(biāo)定光平面法向量和目標(biāo)深度信息。張黎爍等[9]提出僅需2個特征點(diǎn),通過控制攝像機(jī)做4次線性無關(guān)的平移運(yùn)動和2次旋轉(zhuǎn)運(yùn)動,即可實(shí)現(xiàn)手眼系統(tǒng)的標(biāo)定。何佳唯等[10]結(jié)合標(biāo)定板設(shè)計了一種手眼關(guān)系混合標(biāo)定方法,用于求解手眼旋轉(zhuǎn)矩陣和平移矩陣。徐成剛等[11]基于馬達(dá)代數(shù)空間構(gòu)建手眼標(biāo)定方程,并利用SVD方法求解手眼關(guān)系矩陣,取得了較好的效果。
受上述相關(guān)研究的啟發(fā),本文提出一種新的基于主動視覺的自標(biāo)定方法,簡化攝像機(jī)旋轉(zhuǎn)的次數(shù),降低了運(yùn)算的復(fù)雜度,能夠滿足工業(yè)領(lǐng)域的精度要求。
1 標(biāo)定原理
1.1 攝像機(jī)內(nèi)參矩陣
攝像機(jī)成像系統(tǒng)原理如圖1所示,特征點(diǎn)M在CCD成像平面O-uv中的成像點(diǎn)坐標(biāo)為MUV(u,v),在圖像平面ON-XNYN中的成像點(diǎn)坐標(biāo)為MN(xn,yn),在攝像機(jī)坐標(biāo)系OC-XCYCZC中的坐標(biāo)為MC(xc,yc,zc)。
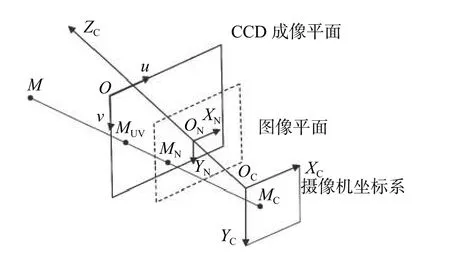
圖1 攝像機(jī)成像系統(tǒng)原理圖
K是攝像機(jī)內(nèi)參矩陣五參數(shù)模型,圖像平面x軸、y軸的尺度因子分別用表示,表示畸變因子,(u0,v0)是CCD成像平面的原點(diǎn)。攝像機(jī)成像系統(tǒng)中坐標(biāo)變換關(guān)系如下:

1.2 坐標(biāo)關(guān)系轉(zhuǎn)換
基于主動視覺的手眼系統(tǒng)如圖2所示。其中,特征點(diǎn)M在世界坐標(biāo)系OW-XWYWZW中的坐標(biāo)為MW(xw,yw,zw),在機(jī)械手末端坐標(biāo)系OH-XHYHZH中的坐標(biāo)為MH(xh,yh,zh),在攝像機(jī)坐標(biāo)系OC-XCYCZC中的坐標(biāo)為MC(xc,yc,zc)。
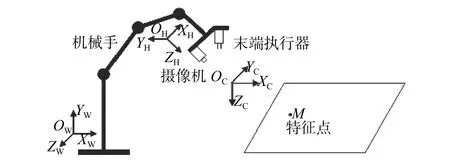
圖2 基于主動視覺的手眼系統(tǒng)原理圖
綜合式(1)~式(5),得到手眼系統(tǒng)中的坐標(biāo)變換關(guān)系,其中ξ表示特征點(diǎn)在攝像機(jī)坐標(biāo)系的深度值。

1.3 擴(kuò)展焦點(diǎn)
根據(jù)擴(kuò)展焦點(diǎn)的性質(zhì)[12],任一特征點(diǎn)在攝像機(jī)平移前后的對應(yīng)點(diǎn)連線均通過擴(kuò)展焦點(diǎn),因此可以通過場景中的2個或2個以上特征點(diǎn)來求解擴(kuò)展焦點(diǎn)。
如圖3所示,圖像I和圖像II是攝像機(jī)平移前后的兩幅圖像,P1和P2是特征點(diǎn)M在平移前后圖像上的位置。攝像機(jī)做平移運(yùn)動,直線OCO和OC'O'平行,直線P2'O和P2O'平行。P2'是P2在圖像I上的對應(yīng)點(diǎn),對應(yīng)點(diǎn)連線P2'P1和OCOC'相交于擴(kuò)展焦點(diǎn)e。
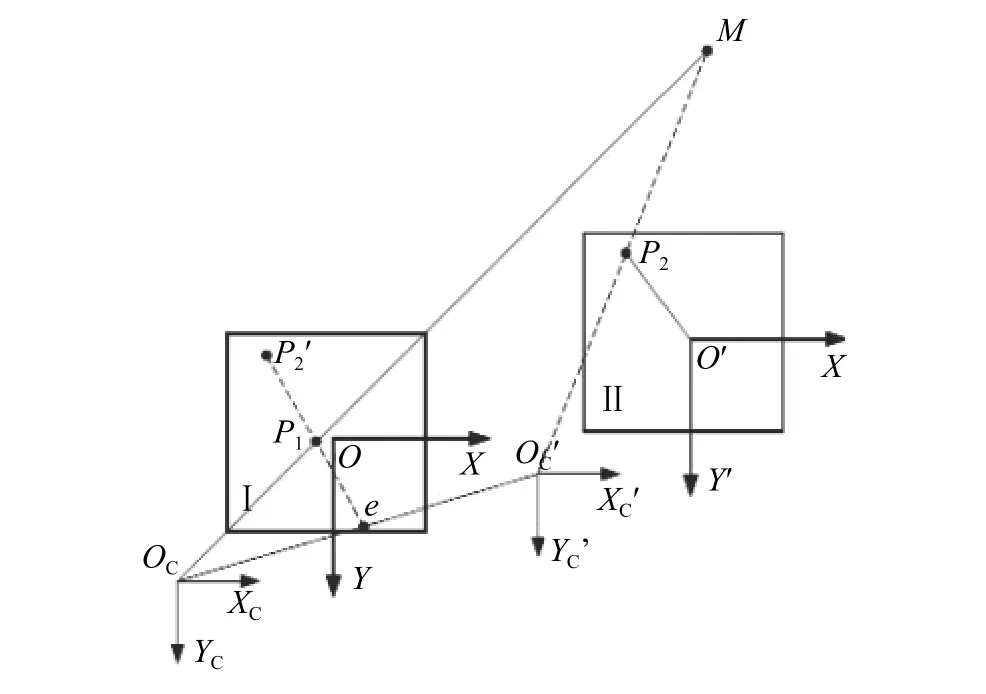
圖3 擴(kuò)展焦點(diǎn)的原理圖
由式(2)和式(3),可得擴(kuò)展焦點(diǎn)e在攝像機(jī)坐標(biāo)中的坐標(biāo):
式中moce表示OC到e的向量,mococ′表示OC到OC′的向量,c=moce/|moce|,表示攝像機(jī)平移運(yùn)動的單位向量,且k>k1>0。
2 手眼關(guān)系旋轉(zhuǎn)矩陣的標(biāo)定
控制攝像機(jī)做1次平移運(yùn)動,XH1、XH2是平移前后特征點(diǎn)M在機(jī)械手末端坐標(biāo)系中的坐標(biāo),XC1、XC2是平移前后特征點(diǎn)M在攝像機(jī)坐標(biāo)系中的坐標(biāo),則有:

式(10)-式(9),可得:

式(11)結(jié)合式(8),可得:

如式(12)所示,控制機(jī)械手做3次線性無關(guān)的平移運(yùn)動,可得:

式中B=(b1,b2,b3),C=(c1,c2,c3),可得手眼關(guān)系旋轉(zhuǎn)矩陣為

式(14)表明,通過精確控制攝像機(jī)做3次線性無關(guān)的平移運(yùn)動,可以標(biāo)定手眼關(guān)系的旋轉(zhuǎn)矩陣,且為正交陣。
3 攝像機(jī)內(nèi)參矩陣的標(biāo)定
式(7)結(jié)合式(12),可得:

式(15)等價于:

假定
結(jié)合式(16)和式(17),可得:
如式(18)和式(19)所示,假定另一矩陣A′除外其余元素與A相同,控制攝像機(jī)做4次線性無關(guān)的平移運(yùn)動,可通過最小二乘法求出A′的唯一解。為了確定a33的值,由式(17)得:


求出a33后,再由式(20)求出A,實(shí)現(xiàn)攝像機(jī)內(nèi)參矩陣的標(biāo)定。
4 特征點(diǎn)目標(biāo)深度的標(biāo)定
如圖1所示,控制攝像機(jī)做1次平移運(yùn)動,(u1,v1)和(u2,v2)是平移前后特征點(diǎn)M在CCD成像平面的坐標(biāo),(x1,y1)和(x2,y2)是平移前后特征點(diǎn)M在圖像平面的坐標(biāo),MC1(xc1,yc1,zc1)和MC2(xc2,yc2,zc2)是平移前后特征點(diǎn)M在攝像機(jī)坐標(biāo)系中的坐標(biāo),由式(2)、式(3)和式(8)得:
結(jié)合式(1),將式(22)代入式(23),可得:
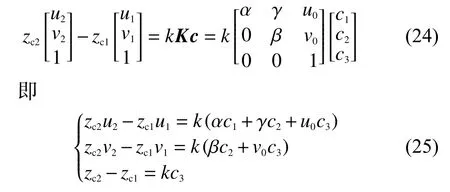
化簡式(25),可得:


同理,通過式(26)可以求出zc2的值。同時式(26)、式(27)也表明通過控制攝像機(jī)做1次平移運(yùn)動,可以求出平移前后特征點(diǎn)的目標(biāo)深度信息。
5 手眼關(guān)系平移向量的標(biāo)定
完成上述4次線性無關(guān)的平移之后,為了標(biāo)定手眼關(guān)系的平移向量,可以先控制機(jī)械手做1次實(shí)旋轉(zhuǎn)運(yùn)動(姿態(tài)1→姿態(tài)2,如圖4所示),然后再控制攝像機(jī)做1次虛擬旋轉(zhuǎn)運(yùn)動(姿態(tài)2→姿態(tài)3,如圖5所示)。
同時需要注意的是,由于手眼系統(tǒng)中攝像機(jī)被固定在機(jī)械手末端,為了使旋轉(zhuǎn)前后機(jī)械手末端坐標(biāo)系和攝像機(jī)坐標(biāo)系的旋轉(zhuǎn)部分平移部分保持一致,實(shí)際是不能控制攝像機(jī)基于機(jī)械手末端完成姿態(tài)2→姿態(tài)3的旋轉(zhuǎn)操作。因此,圖5所示的只是假想控制攝像機(jī)做1次虛擬旋轉(zhuǎn)運(yùn)動,并基于此次虛擬旋轉(zhuǎn)做進(jìn)一步的標(biāo)定分析,同時還需保證虛擬旋轉(zhuǎn)結(jié)束后的攝像機(jī)坐標(biāo)系與實(shí)旋轉(zhuǎn)之前攝像機(jī)坐標(biāo)系的各個數(shù)軸平行且方向完全一致。
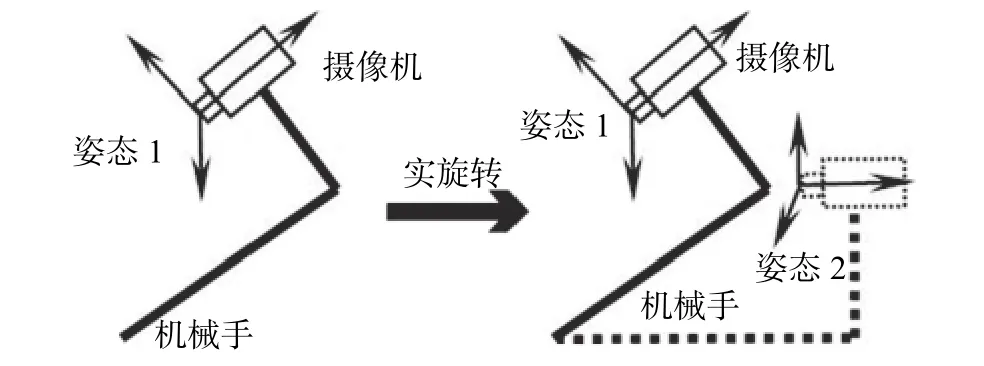
圖4 實(shí)旋轉(zhuǎn)前后手眼系統(tǒng)姿態(tài)對比
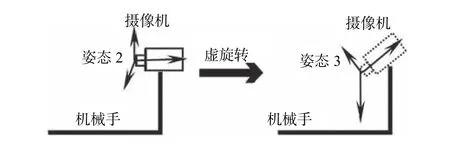
圖5 虛旋轉(zhuǎn)前后手眼系統(tǒng)姿態(tài)對比
XH5、XH6是實(shí)旋轉(zhuǎn)前后特征點(diǎn)M在機(jī)械手末端坐標(biāo)系中的坐標(biāo),XC5、XC6是實(shí)旋轉(zhuǎn)前后特征點(diǎn)M在攝像機(jī)坐標(biāo)系中的坐標(biāo)。則有:
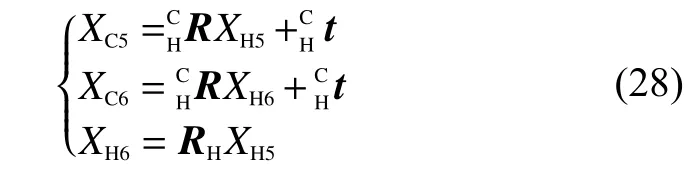
由式(28),可得:

如圖5所示,虛旋轉(zhuǎn)完成后,特征點(diǎn)M在機(jī)械手末端坐標(biāo)系中的坐標(biāo)是XH7,在攝像機(jī)坐標(biāo)系中的坐標(biāo)是XC7,可得:

結(jié)合式(29)和式(30),可得:

式(31)表明經(jīng)過一次實(shí)旋轉(zhuǎn)和一次虛旋轉(zhuǎn)后,特征點(diǎn)M在攝像機(jī)坐標(biāo)系中的坐標(biāo)XC5(xc5,yc5,zc5)和XC7(xc7,yc7,zc7),可以看作是一次平移運(yùn)動前后的坐標(biāo)變換。
結(jié)合式(2)、式(3)和式(30),可得

假定
將式(33)和式(34)代入式(32),可得:
將式(35)展開,可得:
式(36)中,矩陣D的9個元素已知,(u6,v6)是機(jī)械手實(shí)旋轉(zhuǎn)后特征點(diǎn)M在CCD成像平面的坐標(biāo),由此可以求出機(jī)械手虛旋轉(zhuǎn)后特征點(diǎn)M在CCD成像平面的坐標(biāo)(u7,v7),進(jìn)而可以求出虛旋轉(zhuǎn)后特征點(diǎn)M在攝像機(jī)坐標(biāo)系的坐標(biāo)XC7(xc7,yc7,zc7)。
由式(2)、式(3)和式(8)得:
由于(u5,v5)→(u7,v7)的對應(yīng)關(guān)系類似于一次平移運(yùn)動,因此結(jié)合這兩點(diǎn)的坐標(biāo)可以求出平移運(yùn)動的單位向量c′。
將式(1)和式(37)代入式(38),可得:

化簡式(40),可得:



由式(43)可知,通過控制手眼系統(tǒng)中的機(jī)械手做一次實(shí)旋轉(zhuǎn),然后再控制攝像機(jī)做一次虛旋轉(zhuǎn),可以實(shí)現(xiàn)對手眼關(guān)系平移向量的標(biāo)定。
6 實(shí)驗(yàn)與精度分析
6.1 實(shí)驗(yàn)步驟
標(biāo)定實(shí)驗(yàn)的測試平臺采用的是DENSO VP-6242E/GM工業(yè)機(jī)器人,攝像機(jī)鏡頭的焦距為8 mm,感光CCD分辨率為640×480。
如圖6所示,首先控制攝像機(jī)做4次線性無關(guān)的平移運(yùn)動。為提高計算精度,取三特征角點(diǎn)對應(yīng)連線的均值[9]計算CCD成像平面中擴(kuò)展焦點(diǎn)的坐標(biāo)。

圖6 4次平移運(yùn)動
然后根據(jù)擴(kuò)展焦點(diǎn)的坐標(biāo)可以求出攝像機(jī)平移運(yùn)動過程中的方向向量,繼而求出手眼關(guān)系的旋轉(zhuǎn)矩陣和 攝像機(jī)內(nèi)參矩陣。
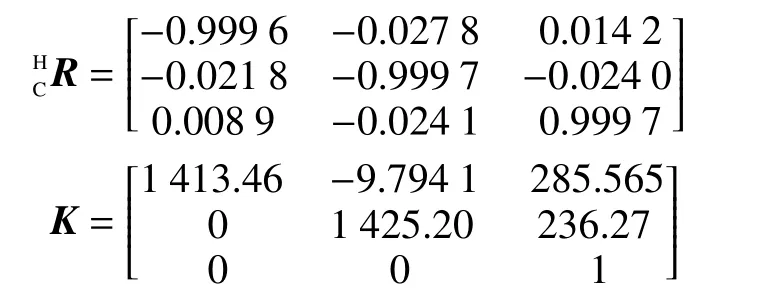
接著做1次實(shí)旋轉(zhuǎn)運(yùn)動,此次實(shí)旋轉(zhuǎn)結(jié)合1次假想的虛旋轉(zhuǎn),可以求出手眼關(guān)系的平移矩陣為

為了進(jìn)一步確保自標(biāo)定方法的正確性,最后還需在機(jī)械手末端安裝一個執(zhí)行器,同時計算該末端執(zhí)行器在機(jī)器人世界坐標(biāo)系中的偏移修正值ts。

6.2 精度分析
在攝像機(jī)內(nèi)參矩陣、手眼關(guān)系旋轉(zhuǎn)矩陣和平移向量完成求解之后,在保持機(jī)器人本體姿態(tài)不變的情況下,進(jìn)行平面和三維數(shù)據(jù)驗(yàn)證測試,測試結(jié)果如表1所示。
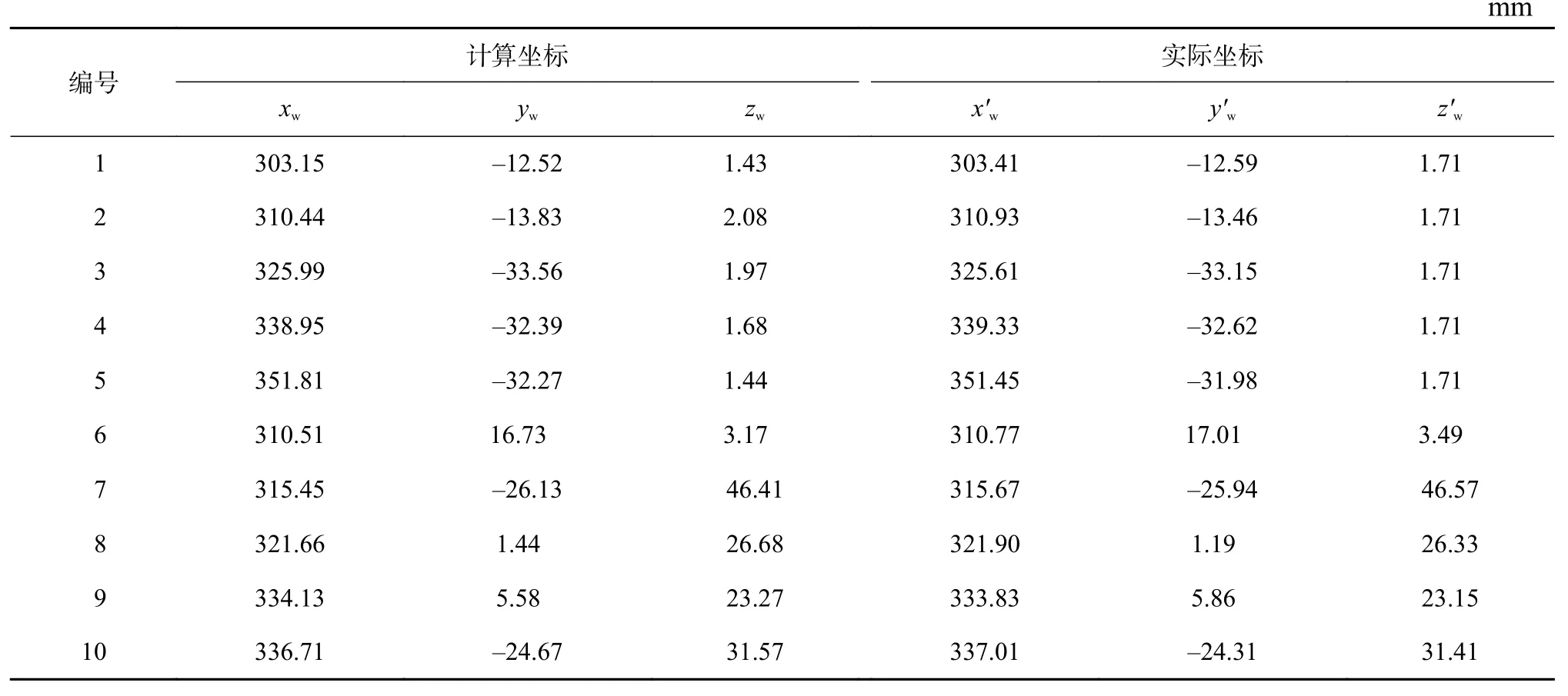
表1 測量精度分析
表1中的計算坐標(biāo)由手眼系統(tǒng)自標(biāo)定時相關(guān)特征點(diǎn)坐標(biāo)值計算得出,其中1~5號為平面測試數(shù)據(jù),6~10號為三維測試數(shù)據(jù),最大測量誤差均不超過0.40 mm,能夠滿足工業(yè)領(lǐng)域的精度要求。
7 結(jié)束語
與傳統(tǒng)手眼系統(tǒng)自標(biāo)定方法相比,提出的基于主動視覺的手眼系統(tǒng)自標(biāo)定方法無需標(biāo)定參照物,實(shí)現(xiàn)過程相對簡單,并在2個方面對做了較好的改進(jìn):1)通過控制攝像機(jī)做3次線性無關(guān)的平移運(yùn)動,即可實(shí)現(xiàn)對手眼關(guān)系旋轉(zhuǎn)矩陣的線性求解,比文獻(xiàn)[6]簡化了1次平移運(yùn)動,降低了手眼關(guān)系旋轉(zhuǎn)矩陣以及后續(xù)攝像機(jī)內(nèi)參矩陣求解的運(yùn)算復(fù)雜度;2)與文獻(xiàn)[9]相比,本方法簡化了1次實(shí)旋轉(zhuǎn),只需1次實(shí)旋轉(zhuǎn)結(jié)合1次虛旋轉(zhuǎn)即可,降低了求解手眼關(guān)系平移向量的運(yùn)算復(fù)雜度。最后的實(shí)驗(yàn)結(jié)果表明,本方法能夠保證實(shí)際作業(yè)精度,對促進(jìn)手眼系統(tǒng)的工業(yè)應(yīng)用具有參考價值。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
